基于广义有序Logit模型的运行速度安全性研究*
2024-03-07祁欣月杨灿
祁欣月, 杨灿
(西藏大学 工学院, 西藏 拉萨 850011)
根据国家统计局的资料,2001—2018年,约1/3的机动车死亡事故涉及超速行驶;2017年,52 274名司机参与了34 247起致命车祸,导致37 133人丧生,事故发生时17%的车辆超速行驶,26%的死亡司机中至少有1人涉及超速驾驶;与速度相关的事故约占总事故的1/3,在人为因素引起的事故中排名第二;2018年上半年,共有105 000起涉及受伤的交通事故,其中超速占13.8%[1]。可见,超速是交通事故的主要原因之一。在较高的速度下,驾驶员的判断能力降低,无法正确操控车辆或判断其他车辆的速度。车速越高,驾驶员的注视点越远,视野越窄,同时制动距离增大,驾驶员应对危险或紧急情况的时间减少,会导致更多的碰撞。车速控制一直是交通安全领域的研究热点,相关研究主要集中于限速、速度执法和驾驶员速度选择等措施的安全效果评价[2]。
1 研究现状
1.1 车速与事故的关系
车辆速度与道路安全之间的关系一直是交通安全研究的主题。Solomon D.根据四车道公路的数据研究车速与事故之间的关系,将撞车原因归结于速度变化,并提出式(1)所示速度模型,该模型是关于车速和事故之间定量关系的早期研究[3]。
I=100.000 606 2Δv2-0.006 675Δv+2.23
(1)
式中:I为分段中的碰撞率;Δv为速度差,即某段中的运行速度与平均运行速度之差。
Solomon模型曲线为U形。速度差接近零时,事故率最低;速度差变大时,无论是在正向还是负向,事故率都增加。
1989年,瑞典进行了为期2个月的试验,将限速从110 km/h调整为90 km/h。与1988年同期相比,汽车的平均速度降低14.4 km/h,事故次数减少21%,表明运行速度降低会降低事故率,提高道路交通安全性。
1993年,莫纳什大学事故研究中心提出速度差和事故率之间的近似函数,称为MUARC模型,表达式见式(2)。与Solomon模型类似,该模型中速度差与事故率成比例。
I=500+0.8Δv2+0.014Δv3
(2)
2004年,Elvik R.等提出一组反映车辆平均运行速度与事故次数或受伤严重程度之间关系的幂函数[4]:
(3)

(4)
(5)
Y0)
(6)
(7)
Y0)
(8)
式中:v0、v1分别为采取交通控制措施前后的速度;Y0为速度变化前的碰撞次数;Z0为速度变化前的严重受伤人数。
Elvik R.还发现,与交通量变化相比,平均车辆运行速度变化对伤害事故的影响更大[5]。
1.2 期望速度和实际运行速度
期望速度ve(也称为心理速度)是指驾驶员在道路运行中不受或基本不受其他车辆约束的情况下期望达到的最高安全速度。不同类型车辆具有不同的性能条件,条件良好的车辆能以较高的车速行驶,期望速度相应提高。驾驶员的期望速度因个性特征、驾驶技能和年龄等差异而有所不同[6]。受道路条件、交通流、气候条件及运输任务缓急等因素的影响,期望速度在某种程度上是一个理想值,难以准确获得。
实际运行速度是中等技能驾驶员在实际道路、交通流和气候条件下可以保持的安全速度,通常将测量速度的第85%位速度v85作为运行速度。Agent K. R.等以第85%位速度作为限速依据,并建议小型汽车和货车分别采用不同的限速[7]。
1.3 实际运行速度模型
实际运行速度随期望速度波动。当道路条件和交通流达到预期的理想条件时,车辆将以期望速度行驶。由于道路线形、车辆性能或交通流的变化,车辆实际运行速度将低于预期[8]。因此,设定各区段的期望速度是准确预测运行速度的关键。
1987年,Lamm R.等在84条弯曲路段进行车辆行驶试验,得到了基于竖曲线曲率变化和半径的车辆运行速度预测模型[9]:
v85=95.78-0.076RCCR,R2=0.842
(9)
式中:RCCR为曲率变化率。
张琦等的研究表明切线长度、曲率半径、曲线长度、缺陷角、纵坡和超高等道路几何参数均与运行速度相关[10]。
2008年,Memon R.等提出基于切线长度、圆曲线角度和切线速度的车辆运行速度模型[11]:
0.163ω,R2=0.62
(10)
式中:R为水平曲线半径;v85,Tmax为切线上第85%位速度的最大值;T、ω分别为平曲线的切线长度和偏转角度。
2011年,Syed A. S. K.等根据曲线半径和切线速度对运行速度模型进行优化,得到以下模型[12]:
R2=0.532
(11)
式中:v85MC为中间曲线的第85%位速度;RRC为圆曲线半径;v85AT为接近切线的第85%位速度。
JTG/T B05—2004《公路项目安全性评价指南》提出了公路运行速度模型。JTG B05—2015《公路项目安全性评价规范》对低等级公路速度模型进行优化和改进,根据平曲线半径和纵断面坡度将评价路段分为切线段、纵坡段、平曲线段、弯坡组合段、隧道段、互通式立交段等进行计算。对于平曲线路段,分别预测曲线中间和末端的运行速度,预测模型见表1;对于纵坡路段的末端,根据表2计算运行速度;对于弯坡组合路段,分别预测曲线中间和末端的运行速度,预测模型见表3[13]。

表1 平曲线路段运行速度预测模型
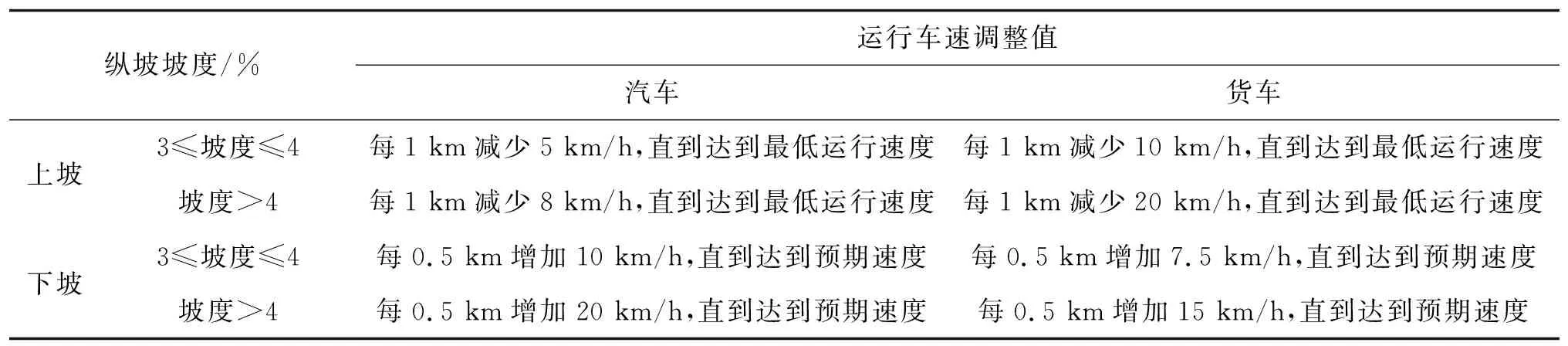
表2 纵坡路段速度换算模型

表3 弯坡组合路段运行速度预测模型
2 基于Logit模型的运行速度安全性研究
已有文献针对车辆速度与道路安全之间的关系进行了研究,并对实际运行速度和期望速度模型进行了细化分析,阐明了车辆运行速度受道路条件、交通流、气候条件等因素影响的规律。但对高速公路运行速度与事故严重程度的关系、高速公路安全受小车和大车运行速度及其他道路环境因素影响的研究较少。本文基于广义有序Logit模型,以京沪(北京—上海)高速公路新沂至江都段2009—2011年的3 293起交通事故为例,对高速公路事故类型、事故严重程度与车辆运行速度的关系进行研究。该高速公路全长259.5 km,设计速度为120 km/h。
2.1 研究方法
序变量是对可能值进行排序的分类变量[14]。本文采用广义有序Logit模型(GOLM)分析车速变量对事故的影响。有序离散结果模型(如有序Logit利润模型)的主要假设是估计参数为常数,称为平行回归假设[15]。通过广义有序Logit模型得到i级损伤的概率如下:
(12)
式中:P(*)表示特定损伤等级事故的发生概率;y为事故的损伤等级;i为事故损伤程度的特定类别;βi为指标对应的拟合系数;Xn表示车速变量;μi为第i级损伤对应的常量系数。
受限于固有的比例优势假设,传统的Logit分析无法涵盖所有受伤严重程度,Wang X. S.[16]和Quddus M. A.[17]等对广义Logit模型进行如下改进:
(13)
式中:β1为根据损伤严重程度确定的参数;X1、X2表示与受伤严重程度密切相关的自变量;β2为固定参数。
GOLM模型中使用的自变量见表4。其中交通事故严重程度遵循公安部的分级标准:轻微事故是指一次造成2人以下轻伤,或财产损失不超过1 000元的事故;一般事故是指一次造成1~2人重伤,或2人以上轻伤,或财产损失为1 000~30 000元的事故;重大事故是指一次造成1~2人死亡,或3~10人重伤,或财产损失为30 000~60 000元的事故;特大事故是指一次造成3人以上死亡,或10人以上重伤,或1人死亡同时8人以上重伤,或2人死亡同时5人以上重伤,或财产损失超过60 000元的事故。根据上述分级标准,京沪高速公路新沂至江都段2009—2011年的3 293起交通事故中,没有一起是非常严重的事故。

表4 GOLM模型中使用的自变量
由于数据信息有限,表4中交通量仅包括213个路段的日交通量。运行速度包括小型汽车和货车的速度、相邻路段之间速度差及每个路段内小型汽车和货车之间速度差。相关研究表明,较高的速度方差会导致更多的事故[18]。
2.2 研究数据
(1) 道路设计施工图。提供道路几何要素的详细信息,如横断面、水平线形、垂直线形、立交等。
(2) 事故记录。事故记录包含对每起事故发生时间、位置等的详细描述,根据事故记录,可以收集事故类型、事故严重程度、受伤或死亡人数、车辆类型等详细信息。
(3) 道路管理机构报告的213个路段的日交通量。
(4) 依据表1~3中速度模型,按照不同的几何特征分段计算小型汽车和货车的运行速度。
(5) 根据实际运行速度调整期望速度。根据JTG B05—2015,汽车的期望速度为120 km/h,货车的期望速度为80 km/h。当计算的车辆实际运行速度高于120 km/h、80 km/h时,使用期望速度值120 km/h、80 km/h。
3 模型计算结果分析
以事故类型和事故严重程度作为因变量,对自变量与因变量进行Pearson相关性分析,结果见表5。

表5 自变量与因变量的Pearson相关性分析结果
由表5可知:事故类型与自变量的相关性优于事故严重程度。以事故类型为因变量的广义有序Logit模型中,各参数的系数、标准误差和p值见表6。
Baruya A.等研究伤害事故与车速之间的相关性,发现平均车速和速度差对事故的影响都很大,随着平均车速的增加事故数量增加[19]。Ayati E.等认为平均车速增加,事故数量会随着速度差的减小而减少[20]。Lassarre S.认为在相对固定的速度范围内,车速变化对道路安全有显著影响,车速值的影响较小[21]。Savolainen P.等认为致命事故率受车辆间速度差的影响较大[22]。由表5、表6可知:1)vo-car、Δvo-car-b、Δvo-truck-b(p<0.01)是影响事故类型的重要因素,与文献[19-20]的研究结论相符。高速行驶时,视线变远,视野范围变窄,驾驶员反应变慢,更容易做出错误的决定。此外,由于多种几何组合变化较多,在速度差较大的道路区间,对车辆速度的控制更困难,特别是车辆进入或驶出速度差较大的坡道时,发生事故的频率更高。2) 货车的运行速度不如速度差重要,与文献[21-22]的研究结论一致。3)vo-car、Δvo-car-f、Δvo-car-b、Δvo-truck-b具有统计学意义,以Yv表示它们对因变量的影响,根据表6中的回归结果,可得到式(14)。说明当小型汽车的实际运行速度和后段货车的速度差较高时,对事故的影响将更大,与文献[23]的研究结论一致。4) 对于事故严重程度,只有Δvo是重要参数,其他参数(如汽车或货车速度)没有显著相关性。这一结果与Garber N. J.等的研究结论一致,他们研究发现事故率和平均速度之间没有明显的联系[24]。5) 就天气条件而言,雨雪天的安全风险比晴天、阴天高30.1%。因为雨雪天道路很滑,驾驶员的视力很差,安全风险增大。
Yv=0.011 20vo-car-0.009 52Δvo-car-b+
0.012 12Δvo-truck-b
(14)
4 结论与建议
本文研究速度及速度差对事故类型和事故严重程度的影响。以京沪高速公路新沂至江都段为例,根据道路几何结构将其分割为213个不同路段,并计算每个路段的运行速度。采用广义有序Logit模型对该路段2009—2011年的3 293起事故数据进行分析,量化运行速度、相邻路段的速度差及不同车型之间速度差对事故类型和事故严重程度的影响。分析发现显著的影响因素包括与相邻路段的速度差、车辆运行速度和天气条件。
可采取如下措施改善道路交通安全:1) 在匝道等运行速度由高到低的过渡区域,采取合理的减速措施,如设置减速带、振动标记、光学标记、限速标志、安全警示牌等,若与相邻路段的速度差过大,在相应位置安装减速标志、警告标志等交通安全标志,提醒驾驶员提前减速,确保行车安全。2) 为减少汽车和货车之间的干扰,建议采用不同车型的车道分配模式。设置交通标志和路面标记,提醒货车司机在外车道行驶、汽车司机在内车道行驶。3) 平原地区公路的水平和垂直线形通常优于山区,长切线段会提高驾驶员的期望速度。可在这种路段设置限速标志、安全警告标志、减速带等安全设施,提醒驾驶员注意安全,并严格执行限速,确保行车安全。
未来的研究方向如下:1) 利用更真实的事故数据研究影响交通事故的因素,包括驾驶员性别和年龄、实时交通量、事故发生位置、事故发生时间和天气状况等。2) 收集实时车速作为面板数据,并与计算的运行速度进行比较,研究实时车速对交通事故的影响。3) 根据实时车速建立模型预测事故,为道路设计、管理和驾驶教育方案制定提供更合理的指导。