RIS-4D生物雷达多人体定位与生命体征监测
2024-03-07戴永鹏宋勇平
金 添 李 志 戴永鹏 宋勇平
(1.国防科技大学电子科学学院,湖南长沙 410073;2.陆军工程大学通信士官学校,江苏南京 210007)
1 引言
非接触式生命体征监测是一项新兴的技术,可被用于日常健康监测、辅助生活、智能座舱、生命搜救和公共安全等领域[1-5]。对于各种非接触式探测技术,光学摄像机容易受到光的干扰和遮挡,并可能侵犯个人隐私;超声波在空气中会显著衰减,很容易被衣服吸收;相比之下,雷达已被证明适用于生命体征探测。将生命体目标作为探测对象的雷达也称为生物雷达,已经成为非接触式生命体征探测的热点研究方向。生物雷达生命体征探测利用心肺微动散射的电磁波信号获取呼吸、心跳等生命体征信息,具有非接触性、非视距、隐私保护、远距离测量等优点。
目前生物雷达已经从单目标探测发展为可以同时探测多个目标。针对多个目标的生命体征探测,Singh 等人从雷达结构、硬件和算法等方面全面分析了真实场景中多目标检测的研究现状[6]。在信号处理算法层面,Islam等使用盲源分离技术来分离多人的呼吸信号[7]。Ding 等利用变分模态分解(Variational Mode Decomposition,VMD)算法,利用脉冲超宽带(Impulse Radio Ultra-Wideband,IR-UWB)雷达对相同距离的两个静止目标的呼吸信号进行分离和恢复[8]。Rong等人使用心跳信号谐波来检测相同距离的多个静止目标的心率[9]。Zhang等人利用欠定盲源分离(Undetermined Blind Source Separation,UBSS)方法来分离多人的呼吸信号,该方法使用的雷达结构简单,但不能区分分离出的信号与目标之间的对应关系[10]。此外,不同人体的生命体征通常还会相互干扰。在雷达系统结构层面,Mercuri等人提出了一种集成两个频率扫描天线的单输入单输出调频连续波(Frequency Modulated Continuous Wave,FMCW)雷达结构[11]。他们将其用于远程二维(2D)定位(距离和角度信息)和对多个人体目标的生命体征监测。Kang 等人利用频率扫描阵列进行呼吸监测、2D 定位和目标轨迹跟踪[12]。Yan 等人使用合成孔径雷达(Synthetic Aperture Radar,SAR)模式进行目标成像和人体呼吸频率测量[13]。Xiong等人介绍了一种基于自适应数字波束形成(ADBF)技术的单输入多输出连续波雷达系统,用于同时检测未知位置的多个呼吸[14]。针对多输入多输出(Multiple-Input Multiple-Output,MIMO)体制的生命体征探测雷达,Cardillo 等人对MIMO 技术及其在生命体征检测和人体定位中的应用进行了综述[15]。Koda 等人利用MIMO 雷达系统和呼吸空间聚类的方法来定位和测量多个人的呼吸信号[16]。Walterscheid等人介绍了一种二维成像雷达,可以同时监测24 GHz 和77 GHz 处的多个生命体征,并提出了一种从测量数据中分离呼吸和心跳的信号处理方法[17]。Shang 等开发了一个分布式MIMO IRUWB 雷达原型系统,用于对多个人体目标进行二维定位,并估计呼吸和心跳频率[18]。Wang 等人开发了一种高度集成的MIMO 雷达系统,通过变化检测算法进行三维(3D)定位和同时检测生命体征,并验证了检测和分离两个受试者的呼吸和心跳信号的能力[19]。
将MIMO 面阵列和宽带信号相结合的四维(4D)雷达能够同时检测多个人体目标的生命体征。然而,随着信道数目的增加,基于MIMO 的4D 雷达的成本急剧增加。近年来,在无线通信和感知领域,利用超表面天线实现相控阵和MIMO阵列功能吸引了大量关注,尤其是随着超表面理论和工程技术的不断完善,可重构智能表面(Reconfigurable Intelligent Surface,RIS)在辅助通信和智能感知方面取得了突破性进展,为生物电子系统设计的RIS已经在当前和新兴医疗保健技术中展现出应用潜力[20]。在生命体征监测方面,目前的研究主要是将超材料漏波天线用于线扫描。与之对比,由于RIS是一种集成了超表面的通用可编程射频设备,通过对透射场或反射场的幅度或相位进行调控来实现对电磁波的多维度控制,因此能够在人体周围灵活地调控电磁波,适合于生命健康和行为活动的无线感知。
在本文中我们设计了一种基于RIS 结构的4D生物雷达非接触式生命体征监测系统,用以同时探测定位多个人体目标并监测各个目标的呼吸和心跳信号,其探测原理示意如图1 所示。该系统采用RIS 来动态操控电磁波,以实现波束形成和波束控制,从而探测定位人体目标并从回波信号中提取分离呼吸和心跳信号。由于利用了RIS进行空间波束形成,因此能同时定位并测量多个人体目标。此外,波束形成使得波束能量聚焦到人体目标上,有助于减少静止物体(背景和四肢等)引起的干扰,从而提高信杂噪比,实现比传统生物雷达更远距离的测量。图2显示了RIS-4D生物雷达多人体定位与生命体征监测的信号处理流程,通过在3D空间维度和1D时间维度的处理实现对人体目标的时空信息感知。

图1 RIS-4D生物雷达生命体征感知示意图Fig.1 Vital-sign sensing principle of the RIS-4D bioradar
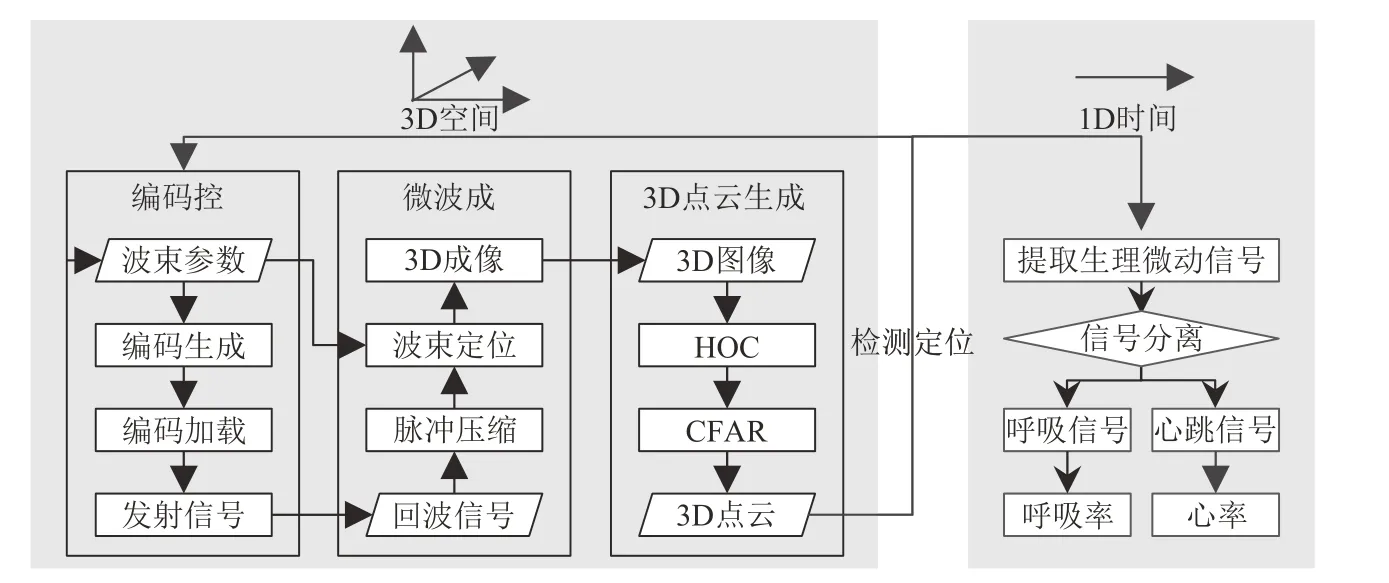
图2 信号处理流程Fig.2 Signal processing flow for the RIS-4D bioradar
2 RIS-4D生物雷达系统结构
4D生物雷达是指采用了4D雷达结构的生物雷达,其中的4D 指的是三维空间和一维时间,它可以在时空维度感知真实的物理世界。与普通的3D 雷达测量距离、方位、速度(时间)不同,4D雷达还可以同时测量高度数据,实现“3D空间+1D时间”四个维度的高分辨率信息感知。与宽带信号和天线阵列相结合,4D雷达在距离、方位、高度和时间维度上具有高分辨率,在无线感知方面具有传统雷达无法比拟的巨大优势。它可以有效地帮助人们理解目标的轮廓、范畴和行为,从而感知目标和环境。RIS-4D 生物雷达利用RIS形成面阵天线,发射宽带信号实现距离高分辨率,从而具有4D探测能力。
2.1 雷达结构
图3(a)和(b)展示了RIS-4D 生物雷达的详细结构和实物图片。该系统采用的收发机是一个单通道FMCW 雷达,集成了一个FMCW 源、一个混频器(Mixer)、一个低噪声放大器(LNA)、一个带通滤波器(BPF)和一个模数转换器(ADC)。

图3 RIS-4D雷达系统结构与实物照片Fig.3 Structure and picture of the RIS-4D bioradar
RIS-4D 生物雷达的特别之处是采用了RIS 调控电磁波。RIS的构成元素——超材料是一种人造复合材料,具有自然界中不常见的特性,能够以新的方式调控电磁辐射。针对电磁波空间波束形成,通常通过射频功率放大器和移相器的组合来调节电磁波,以补偿有源相移。然而,这种实现方式会导致较大的功耗和成本。相比之下,超表面是一种薄的复合结构,通过使用亚波长散射单元可以控制天线孔径上幅度和相位的透射率和反射率分布。因此,它可以将入射波转换为所需的透射波或反射波。进一步,大量RIS 单元组合可以形成RIS 阵列,通过编程控制每个单元的状态,能够重新配置电路的电流或电压,导致每个单元的散射特性都会改变,从而可以实现动态操控电磁波。
该RIS-4D 生物雷达系统原型使用具有相同结构的多个贴片阵元构成RIS面阵。通过可编程阵列(FPGA)板控制PIN 二极管的偏置,每个RIS单元可以产生开(1)和关(0)两种状态(1 比特),对应两个不同相位的散射系数。从阵列理论角度来讲,所采用的RIS可以视为一个动态反射天线阵列。通过编程控制每个单元调控波前,从而生成特定指向的波束或辐射场。RIS可以在发射端或者接收端调控电磁波。如果是在发射端,发射天线辐射的信号经过波前调控传播至目标区域,然后由目标将电磁波信号散射至接收天线。根据互易原理,我们也可以将RIS置于接收端或者同时置于两端。在本文的研究中,RIS被安装于发射端进行波前调控。
2.2 编码与波束形成
通过RIS 对波前的调控,实现波束形成从而对感兴趣区域进行探测感知,如图4 所示。波束形成所需的散射场可以通过可编程单元的0/1 状态来获得,这也被称为RIS的孔径编码。反之,当给定所需的散射场时,设计孔径编码是一个逆问题。为了解决这个问题,首先建立电磁传播的正演模型,即根据RIS单元的状态计算散射场。当用发射天线照射整个超表面时,可以计算出超表面在空间位置r处的空间辐射场为

图4 RIS-4D雷达波束形成示意Fig.4 Beamforming of the RIS-4D bioradar
其中ω表示电磁场角频率,为自由空间中的波数,μ是磁导率。G(r,rmx,my)代表空间位置r到第(mx,my)个超表面单元位置rmx,my的并矢格林函数。Ein(rmx,my)是发射天线入射到位于rmx,my的超表面单元的电场,对于喇叭天线可以近似为Ein=,其中Cin是功率系数,q是辐射方向图因子,θin是观测位置与天线相位中心之间的角度,rin是观测位置与天线相位中心之间的距离。J代表电流密度是超表面的散射系数矩阵,对于1比特超表面单元,0/1编码状态下等效感应电流的状态对应两种,即,分别对应0 和π 相移。对应超表面单元的散射系数,因此超表面阵列的散射场可以记为
(1)计算信息矩阵。根据期望辐射场确定计算平面网格,然后计算信息矩阵Η=[hmn]M×N,其元素hmn的计算方法为
其中M为阵元个数,N为辐射场网格的数量,f为电磁波频率,tn和tm分别对应辐射场和阵元网格点的时延。
(2)初始化超表面阵列编码方案。计算信息矩阵的伪逆Η†,然后得到反推的编码设计,根据最小距离法则将其映射为0或者1。选择某一损失函数计算当前辐射场与期望辐射场之间的差异,损失函数可以选择为均方误差、互信息、交叉熵等,计算初始损失函数L0=L(c),c为阵列编码的0/1矩阵按列重排形成的向量。对于期望辐射场y,阵列编码的计算式为
(3)微调编码。随机选取Qc个阵元,改变其编码,得到新的编码cnew。
(4)计算损失函数。根据步骤(2)中确定的损失函数计算当前辐射场与期望辐射场之间的损失Lnew。
(5)更新编码方案。如果在步骤(4)中计算的损失函数减小,即Lnew
(6)判断是否终止迭代。如果当前损失L0小于预设阈值,或者迭代次数超过预设值则停止迭代。
图5是通过编码设计得到的一组编码对应的散射场,波束能量被聚集在方位向-10°、高度向15°的空间位置。通过切换编码可以实现波束在空间上的扫描,从而覆盖整个探测区域。
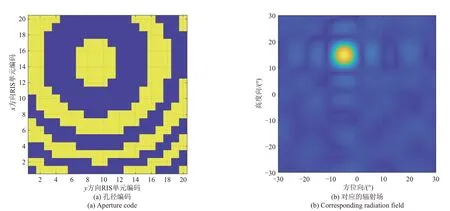
图5 RIS孔径编码与对应的辐射场Fig.5 Aperture code and corresponding radiation field of the RIS
3 多目标生命体征监测
3.1 3D波束扫描成像
对于采用的RIS-4D生物雷达,由于其具有较高的三维空间、时间分辨率,可以通过波束扫描定位得到实时动态的三维图像。
根据电磁波相干成像理论,当波束聚焦到空间位置(r,θ,φ)时,RIS 对应的远场散射波束可以表示为
其中τ代表快时间,r是目标距离,θ和φ分别是方位和高度角度,c为光速。通常信号带宽远小于载频,即,k0为中心频率对应的波数,式(5)可以近似为
通过编码设计,使得波束指向空间角度(θ,φ),对应的回波信号可以表示为
从而,通过切换编码,就可以实现对探测区域的三维空间扫描,扫描结果是球坐标下的表示,进一步可以将三维图像映射到笛卡尔直角坐标:
进而,通过高阶累积量(Higher-Order Cumulant,HOC)对微动目标增强后,利用恒虚警检测(CFAR)以及聚类等信号处理方法,可以检测出目标的位置和数量,从而实现后续的生理微动信号提取。
3.2 多人体定位方法
通过计算雷达图像的高阶累积量可以检测体表的振动。由于高斯噪声的四阶累积量为0,因此可以用四阶累积量进行变化检测。位置xq=(x,y,z)对应的图像体素的四阶统计量的定义是
其中cum[∙]表示计算累积量。在本文中,我们定义零延迟的四阶累积量C4,Ixq(0,0,0)作为雷达图像的高阶累积量Hoc(xq)。那么,在存在人体的情况下,高阶累积量不为0,而在高斯噪声的背景区域为0。在实际中,零延迟的四阶累积量C40可以用超峰度和方差来表示:
进一步,对高阶累积量加权增强后的图像Hoc(xq)进行CFAR 检测,就可以定位胸腔的位置。获得CFAR 的自适应阈值后,就将其与每个体素进行比较。如果体素值超过阈值,则存在目标;否则,就认为不存在目标。通过滑动窗口遍历三维图像,检测到各个人体占据的一个连通区域,就实现了多目标检测与定位。
3.3 呼吸和心跳信号获取
获取雷达图像序列后,我们关注于提取各个目标的生理微动信号。根据成像定位结果,抽取波束指向各个目标时对应的回波数据,然后提取检测位置的回波相位对应的微动信号,该微动信号混叠了呼吸和心跳信号,进而利用信号分离算法分离呼吸和心跳信号。
对于静态人体目标,指向方位和高度角度(θ,φ)的回波可表示为二维形式:
其中τ记录了每个脉冲重复时间(Pulse Repetition Τime,PRΤ)内电磁波信号的传播时间,也称为快时间,t记录了PRΤ时刻,也称为慢时间,τ0表示人体目标对应的回波延时,τv(t)表示人体微动对应的回波延时,在静息状态,该微动是由呼吸微动和心跳微动引起,其微动对应的时延分别为τr(t)和τh(t)。
对快时间域做傅里叶变换,得到
因此,对于相对带宽较小的信号满足B/fc≪1,可以近似为
在目标位置对应的时延τ0处,利用扩展微分交叉相乘(Extended Differentiate and Cross Multiply,EDACM)算法计算相位,可以得到解缠绕后的生理微动信号
根据发射接收和人体目标的空间位置关系,可以将该时延对应到呼吸和心跳微动对应的位移r(t)。当发射和接收天线位于相同位置时,呼吸微动和心跳微动分别为rr(t)=τr(t) ×c/2,rh(t)=τh(t) ×c/2。在上述过程中,需要定位目标位置,可以利用高阶累积量增强并检测人体目标的位置,然后提取对应像素位置的相位得到混叠了呼吸和心跳信号的微动信号。
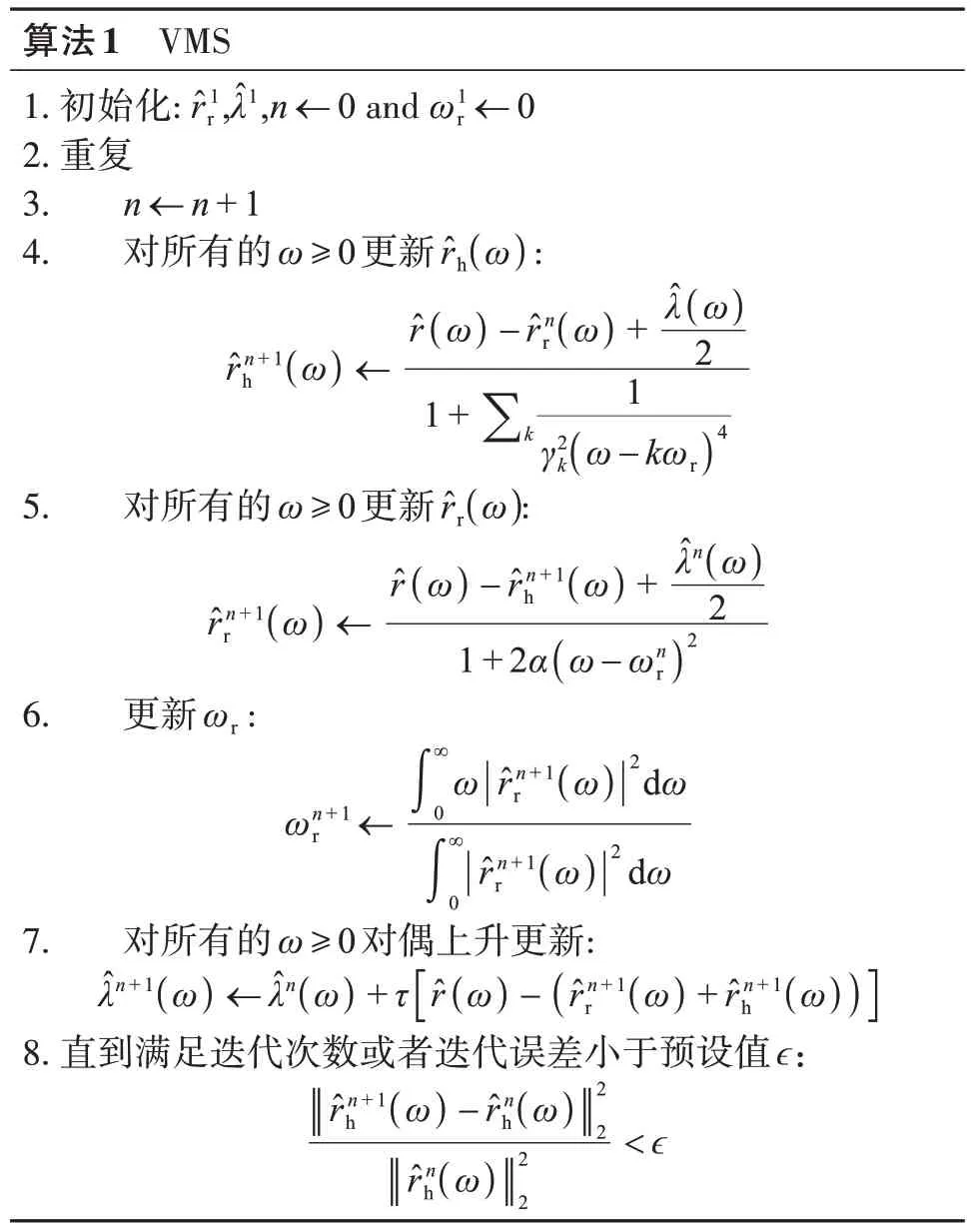
为了从微动信号r(t)中分离出呼吸和心跳信号,可以采用变分模态分离(Variational Mode Separation,VMS)算法实现[22]。VMS 算法是VMD 的改进,适用于两个具有多谐波分量信号的自适应分离。获取的生理微动信号r(t)包含了呼吸微动信号rr(t)和心跳微动信号rh(t),VMS算法通过自动构建自适应滤波器实现呼吸和心跳微动模式的分离。具体而言,呼吸微动信号应该紧紧围绕在其中心频率ωr附近,因此通过将带宽最小化作为变分问题来搜索优化。与VMD 算法类似,通过使用二次罚项和拉格朗日乘子的组合,增广拉格朗日函数可以表示为
其中第一项使呼吸信号的带宽保持在呼吸中心频率附近;第二项保证了心跳信号与呼吸分量的分离,也就是心跳微动信号的能量应该在呼吸微动信号所在的频段被抑制;第三项表示最小二乘保真度约束;λ代表拉格朗日乘子;α是经验参数,可以设置为10000 到20000,较大的α意味着呼吸基频的带宽更窄。βk(t)对应频率响应为的滤波器组,该滤波器组在呼吸谐波频率ω=kωr,k=1,2,…K处实现对呼吸谐波的陷波,γk是调整滤波器陷波深度的参数,通常该经验值可以设置为γk=102k-4。利用L2范数下的Plancherel-Parseval傅里叶等距性质,并且通过在第一项进行变量替换ω←ω-ωr,式(16)可以重写为
利用VMS 算法分离呼吸和心跳微动信号的求解步骤如算法1所示。
4 实验结果与分析
4.1 实验设置
根据上述方法,我们在办公室环境中进行了实验来验证系统的生命体征探测能力,实验环境和设备如图6所示。表1列出了本文RIS-4D生物雷达的主要参数。该原型系统采用的RIS 尺寸为24 cm×24 cm,由400 个宽带1 比特可编程单元等间隔构成,并通过FPGA 电路板控制0/1 编码切换。RIS 单元在频率6.88 GHz~13.62 GHz(相对带宽达65.8%)范围内,单个阵元在两种状态下的相位差保持在180°±20°,幅度保持一致。不同状态之间的转换时间低至20 ns。因此,所采用的RIS 在宽带范围内具有良好的幅度和相位特征。编码优化设计为间隔角度为5°的笔状扫描波束。通过设置编码数量,实现水平和垂直方向范围为-30°至30°的波束扫描。单通道收发系统发射并接收频带为9.5 GHz~10.5 GHz的FMCW信号,对应脉冲重复频率(PRF)是1 kHz。发射功率设置为20 dBm,远低于一部手机的辐射功率。雷达持续发送和接收FMCW 信号,通过与FPGA 控制板以及相连接的计算机可以进行实时三维点云成像以及生命体征微动信号测量。由于收发系统的PRF是1 kHz,因此能够以1 kHz的帧速率连续测量。通过连续测量可以获得三维空间和一维时间信息。
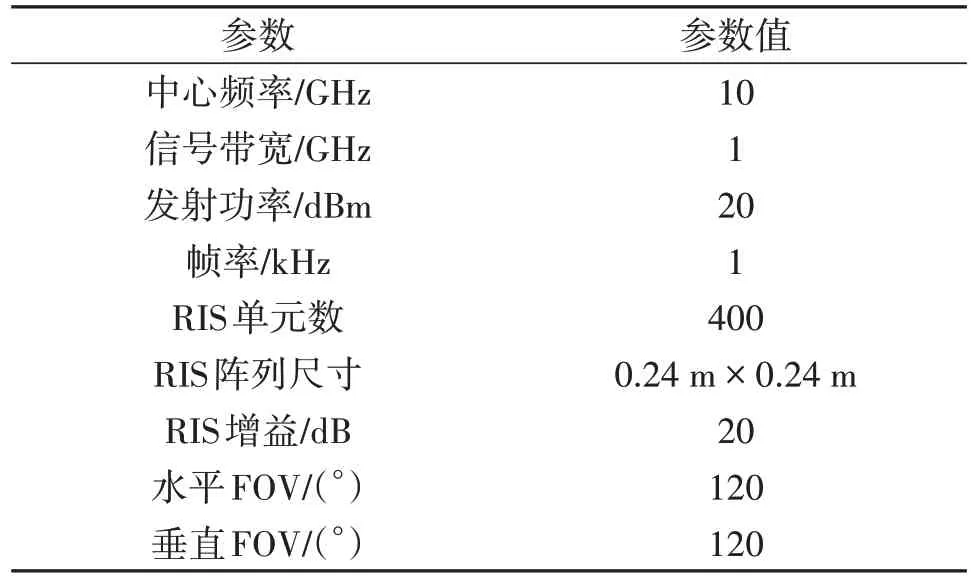
表1 RIS-4D生物雷达的主要参数Tab.1 Key parameters of the RIS-4D bioradar prototype

图6 实验场景Fig.6 Real experimental scenario
接触式生命体征数据采集装置提供心电图、心震图、光电容积脉搏和呼吸信号等参考信号,这些信号是呼吸和心跳测量的黄金标准。该数据采集装置由用于记录心电电位的测量芯片(ADS1298R,Τexas Instruments)模块、呼吸带(MPU9250,ΤDK InvenSense)以及嵌入式数据采集电路板(SΤM32F103)构成。ADS1298R模块具有三个导联电极,用于记录心电电位,实验中采用导联II的波形数据。呼吸带主要由包括MPU9250运动跟踪模块,集成了陀螺仪和加速度计,用于测量胸部扩张引起的呼吸运动。ECG和呼吸带的采样率分别设置为500 Hz和100 Hz。在实验中,受试者佩戴接触式生命体征传感器,如图6中所示,计算机同时处理雷达回波数据和接触式生命体征传感器数据,并通过时间戳对数据进行同步。实验中测试了5个人,包括4名男性和1名女性。所有参与者都被提前告知了实验程序并且同意公布匿名数据。
4.2 成像定位结果
为了验证RIS-4D生物雷达的多目标探测能力以及所提出方法的有效性,在包含三个人体目标的场景进行了实验。三个被测试者如图6所示相邻坐立,分别面朝左、背对以及正对雷达。利用上述方法成像后,可以在图7 的三维图像中清晰看到三个被测试者。图7(a)是原始波束扫描成像结果,通过在YZ平面的投影可以看到不同位置的目标信息,其中2 m处是人体目标,3 m 处是桌子及放置在其上面的杂物,在4 m 处是墙体,图7(b)是经过HOC增强后的成像结果,如图中红色线圈所示,三个人体目标分别位于(0.19 m,-0.42 m,2.05 m),(0.12 m,0.13 m,2.15 m)以及(0.3 m,0.74 m,2.11 m),与实际位置(高度,方位,距离)一致。侧面和背对雷达的人体目标对应的体素幅度弱于正对雷达的人体目标对应的体素,这是因为人体正面的散射截面积比侧面和背面更大,因此正对雷达的人体的雷达图像幅度更大,从YZ平面的投影也可以看出各个目标幅度的大小。
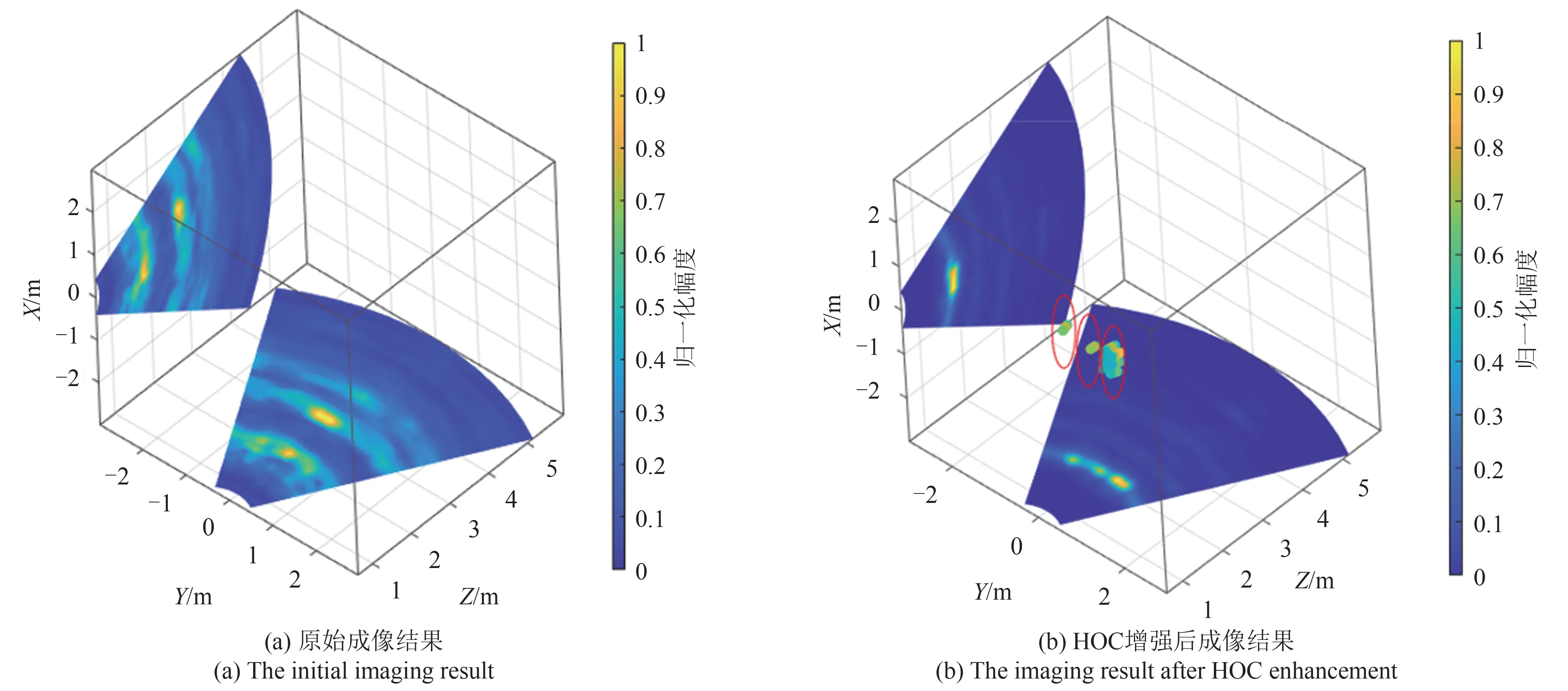
图7 多目标成像结果Fig.7 Imaging results for multiple subjects
图7显示了该生物雷达区分空间中多个目标的能力。到目前为止,该4D生物雷达系统通过高空间分辨率而不是在信号特征域成功地区分了多个对象。沿RIS 平面法线距离5 m 处方位向和高度向的分辨率均为0.5 m,距离向分辨率为0.15 m,因此在典型的办公室或家庭应用场景下,很容易将相邻的两个人分开,并避免来自其他目标的干扰。从而,该系统可以在空间上分辨多个目标,实现同时监测多个用户的生命体征,可满足室内人体定位和健康监测的需要。
4.3 生命体征信号提取结果
在定位人体目标后,通过提取各个目标的相位,进而利用VMS算法分离各自对应的呼吸和心跳微动信号。同时测量的多个目标生理信号的结果如图8所示。最左边的人(目标1)面朝左边,保持正常呼吸,主要是身体左侧散射电磁波,提取的非接触式生理信号如图8(a)中所示。与之相似,图8(b)和(c)分别显示了中间背对雷达(目标2)正常呼吸以及面向雷达(目标3)正常呼吸的结果。与面向雷达相比,背对雷达的心跳微动受到呼吸微动的干扰较小。此外,分离出的心跳信号对于不同的朝向具有不同的波形细节。在每个呼吸周期中,分离的呼吸信号与呼吸带一致,分离的心跳信号也与心电波形周期一致。
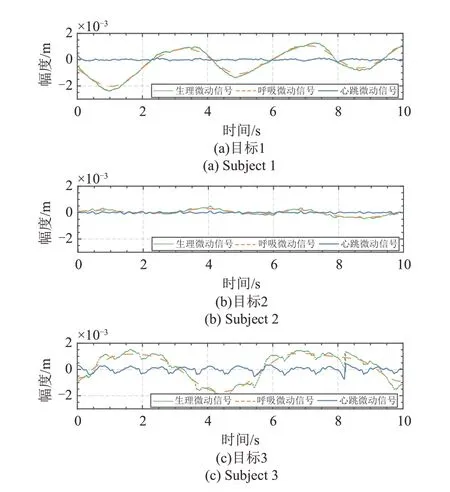
图8 各个目标提取的呼吸和心跳信号Fig.8 Respiratory and heartbeat signals extracted from each subject
根据上述波形监测结果,心跳运动引起的微动比肺部小得多,非接触式心跳信号的测量比呼吸信号的测量具有更大的挑战性,因此进一步计算了心脏活动的临床指标。利用短时自相关可以计算得到瞬时心率,图9显示了瞬时心率随时间的变化。通过与参考心电信号的连续比较,可以发现非接触式监测在测量过程中能够动态跟踪心率变化。计算瞬时心率的滑窗长度为2 s,瞬时心率的参考真值由ECG信号中各个R-R峰值间隔得到。由于心脏跳动是非平稳的,瞬时心率的计算比一段时间内的心率平均值更准确,因此可以动态监测心脏的运动状态。图9中的结果还反映了呼吸性窦性心律失常(Respiratory Sinus Arrhythmia,RSA),这是一种瞬时心率随呼吸而变化的现象。RSA已被用作心脏迷走神经功能情绪调节的指标。吸气时,迷走神经受到抑制,心率增加;呼气时,迷走神经抑制减弱,心率减慢。图9显示瞬时心率变化与呼吸阶段具有较好的对应关系。
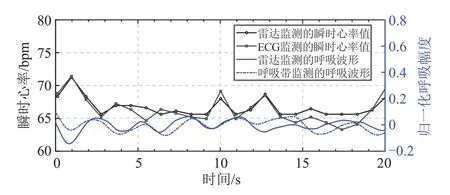
图9 瞬时HR监测结果Fig.9 Monitoring results for instantaneous HR
此外,作为心肌梗死和心力衰竭的预测因子,瞬时心率对应的心率变异性(HRV)在心肺健康诊断中具有重要价值。因此进一步分析了心跳信号的HRV指标。表2显示了一些典型的心率变异性指标并与参考心电图进行了比较。这些指标与参考值具有很高的一致性,验证了RIS-4D生物雷达的性能。
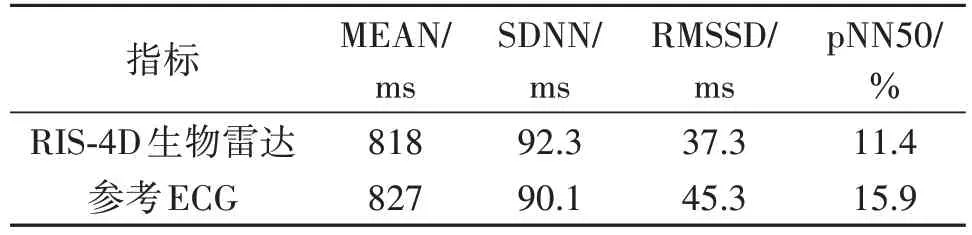
表2 HRV监测结果Tab.2 Monitoring results for HRV
5 结论
本文开发了一种RIS-4D生物雷达,并将其应用于非接触式三维定位和生命体征信号监测。该系统可以通过3D成像对多个人体目标进行动态定位,并且可以捕获各个目标的呼吸和心跳微动信号模式,具有测量瞬时心率和心率变异性指标的能力。在真实的室内环境中进行的实测实验验证了该系统的功能和性能。除了非接触式生命体征监测,该系统的构建还将进一步帮助评估行为模式、认知表现、情绪反应和压力水平。因而,本文提出的RIS-4D生物雷达将以一种智能、实时和廉价的方式实现人体检测、定位、非接触生理信号采集等功能,进而广泛应用于家庭、办公室和公共场所等不同环境的医疗保健。
