基于小波变换的锚杆锚索测力仪设计
2024-03-06吴士涛张晶晶赵玉斌汤建泉王晓明
吴士涛 ,邹 坤 ,杨 婕 ,张晶晶 ,赵玉斌 ,汤建泉 ,王晓明
(1.山东科技大学 智能装备学院,山东 泰安 271000;2.山东科技大学 电气与自动化工程学院,山东 青岛 266000;3.山东科技大学 采矿工程学院,山东 泰安 271000;4.泰安市泰山智诚自动化软件有限公司,山东 泰安 271000)
在采煤工作面的开采过程中,由于煤层采场的推进,煤层会因压力值的变化发生塑性形变,常发生冒顶、冲击地压等事故[1-2]。因此需实时准确监测煤层压力值的变化,并作出准确预警,避免事故发生,显得至关重要。
随着检测技术与传感技术的发展,机械式或电信号传感技术日益成熟,成为目前巷道主要的矿压监测手段。文献[3]设计一种新型锚杆锚索测力仪,利用电阻应变片及应变仪,监测锚杆在受力过程中的应变值变化;文献[4]设计的YHY-60型矿用液压支架测力仪和FCH64/0.5 型矿用手持采集器,通过红外抄取压力数据;文献[5]研发的矿用光纤光栅测力仪和矿压监测软件通过光纤传输实现巷道矿压的在线监测。但上述测力仪对煤层受动压力进行测量时,产生的感应电压信号都会受井下电磁干扰作用而产生的干扰信号,导致传感器的数据准确性与可靠性降低,因此需要对其中的干扰信号进行滤除,得到较为纯净的电压信号。
自1986 年以来,小波分析获得越来越广泛的应用,尤其是在噪声消除、图像处理、故障诊断和特征信号的提取等方面,基于此,设计以HC32L176KATA 为主控芯片的锚杆锚索测力仪[6],采用Symlet8(sym8)小波基函数,对含噪声的电压信号进行降噪处理[7-12],提高测力仪数据的准确性与可靠性。
1 整体设计方案
测力仪结构原理框图如图1。
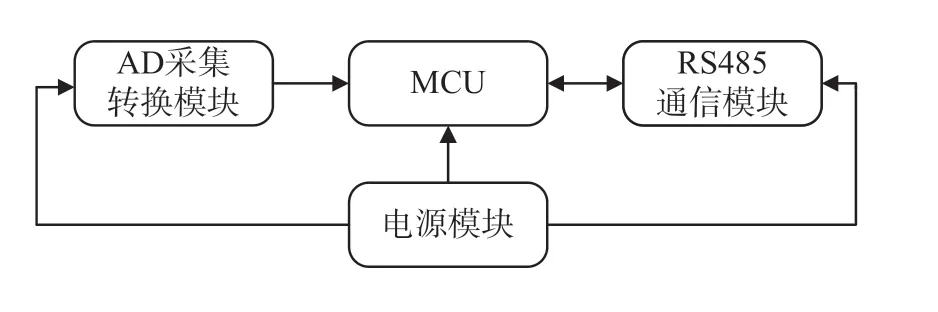
图1 测力仪结构原理框图Fig.1 Block diagram of dynamometer structure
测力仪选用国产基于ARM@ Cortex-M0+ 内核架构的华大九天HC32L 系列处理器为核心,传感器外部贮存电路板的腔体空间有限,设计较为简单,除主控部分外,还有电源模块,A / D 信号采集转换模块,RS485 通信模块。为了提高传感器稳定性、可靠性,以及保证接统能够正常工作,对传感器采集的原始信号,人为的添加高斯白噪声,得到含噪信号,利用小波变换去除噪声,进而得到准确的压力值;通过Matlab,对导入的数据进行仿真测试,确定小波基函数、分解层数、小波阈值及阈值函数,记录关键参数,利用Keil5对测力仪每个模块,进行代码编写。
2 测力仪硬件电路
测力仪硬件电路原理图如图2。
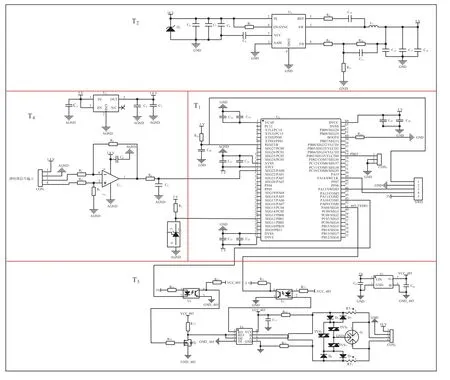
图2 测力仪硬件电路原理图Fig.2 Dynamometer hardware circuit schematic
2.1 主控芯片最小系统
最小系统如图2 中T1部分。最小系统包括主控芯片、电源滤波电路、复位电路、Boot 电路、SWD 下载电路、短接初始化电路。
测力仪的主控芯片采用国产华大九天HC32L176KATA-LQFP64 单片机,该芯片可工作在-40~85 ℃环境下,因此符合井下工作。该芯片具有丰富的片内和外设资源,内存上具有512 K字节的Flash 存储和16 K 字节的RAM 存储,系统频率高达48 MHz,包含4 路UART 标准接口、2 路LPUART 低功耗通信,2 路SPI 标准通信,2 路I2C 标准通信,模数转换的30 路输入通道。
测力仪除最小系统外,还有其他2 部分硬件电路模块组成,包括AD 采集转换电路,485 通信电路,因此对HC32L176 芯片IO 口资源分配,主控芯片资源分配情况见表1。

表1 主控芯片资源分配情况Table 1 Resource allocation of main control chip
2.2 DCDC 降压电路
DCDC 降压电路如图2 中T2部分。
根据测力仪井下供电的方式及大小,以及芯片的供电范围,选择MP2315S 降压同步整流芯片,该芯片最大输入电压24 V,最大输出电流3 A,开关频率500 kHz。矿用本安型18 V 电源接入测力仪,D1为TVS 管吸收输入电源的浪涌电压,C6、C7、C8为输入电容,其中C6作为备用,一同接入到芯片的1 号输入电压引脚。6 号脚为使能引脚,处于高电平时芯片处于工作状态,可通过电阻R7上拉至输入电压。7 号脚为偏置供应引脚,内部是1 个线性稳压器,给芯片内部的逻辑电路供电,通过电容C9接地。因此将其接地,使芯片工作在异步整流的轻载模式。3 号脚为芯片的开关电源PWM 输出引脚,连接电感L1,输出电容C12、C13、C14,其中C14作为备用,同时电感与电容共同构建了输出电压的滤波网络。5 号脚为自举升压引脚,通过R8、C10搭建自举升压网络,连接到3 脚,产生高压驱动内部的mos 管。8 号脚为芯片的反馈引脚,输出电压为5 V,通过查看芯片手册可知,R10、R11的值为40.2、7.5 kΩ,额外加入C11、R9调节环路稳定性。
要求输入电压纹波 ΔVIN小于500 mV,输出的电流IOUT在1 A 左右。根据芯片手册上的输入电容容值计算公式得到,输入电容容值CIN大于15 μF,因此C7选择容值为22 μF,耐压值大于18 V,材质是X5R 的陶瓷电容,C8作为旁路电容,滤除输入电源的高频干扰。输入电容的容值计算为:
式中: ΔVIN为输入电压纹波,V;IOUT为输出电流,A;FSW为芯片的开关频率,kHz;CIN为输入电容容值,F;VOUT为输出电压,V;VIN为输入电压,V。
用示波器接入输入电容C26处,观察输入电压纹波在400 mV,满足设计要求,输入电压纹波如图3。
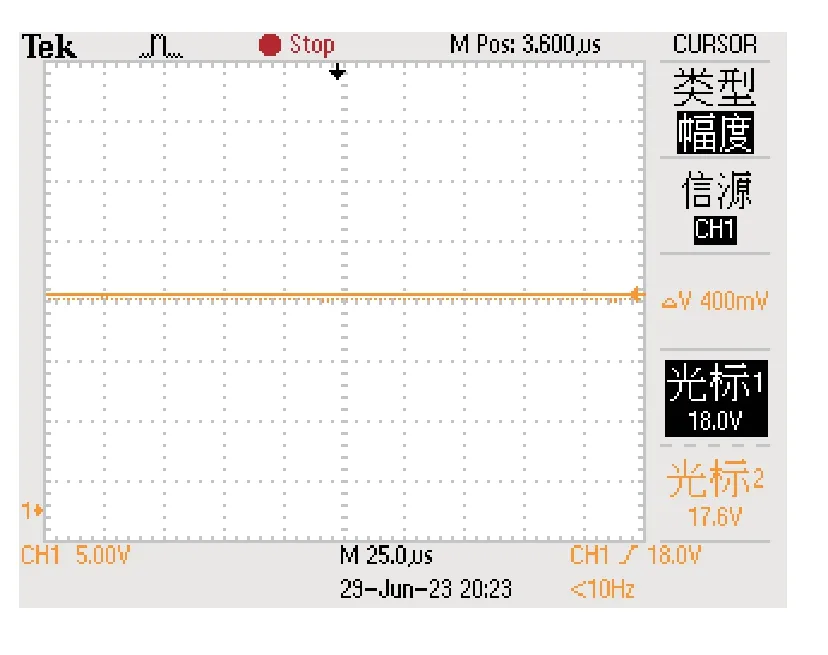
图3 输入电压纹波Fig.3 Input voltage ripple
电感的选型同样会影响输出电压纹波,电感感值越大纹波就越小,但也不是越大越好,确定合适电感值关键是将电感中的峰峰纹波电流值限定在最大输出电流的30%到60%,即 ΔIL在0.9 A到1.8 A 之间,根据芯片手册上的电感感值计算公式得到,电感感值L1在3.24 μH 到6.48 μH 之间。电感感值计算公式为:
式中:L为电感感值,H;VOUT为输出电压,V;FSW为芯片的开关频率,kHz; ΔIL为峰峰纹波电流值,A;VIN为输入电压,V。
另外流过电感的电流要小于电感的饱和电流ISAT,根据芯片手册上的电感饱和电流计算公式得到,饱和电流ISAT要大于4.5 A,因此选择电感值为4.7 μH,直流等效电阻30 mΩ,饱和电流为6 A的屏蔽式电感。电感饱和电流计算公式为:
式中:ISAT为电感饱和电流,A;IOUT为输出电流,A;VOUT为输出电压,V;L为电感感值,H;VIN为输入电压,V。
要求输出电压纹波小于100 mV,根据芯片手册上的输出电容容值计算公式得到输出电容容值COUT大于15 μF,但最大输出电容容值COUT_MAX不超过50 μF,因此C12、C13选择容值为22 μF,材质同样为X5R 的陶瓷电容。输出电容的容值计算公式为:
式中: ΔVOUT为输入电压的纹波,V;VOUT为输出电压,V;FSW为芯片的开关频率,kHz;L为电感感值,H;COUT为输出电容容值,F。
最大输出电容容值计算公式为:
式中:COUT_MAX为最大输出电容容值,F;ILIM_AVG为软启动时的平均电流,A;IOUT为输出电流,A;Tss为软启动时间,s;VOUT为输出电压,V。
用示波器接入输出电容C13处,观察输出电压纹波在80 mV,满足设计要求,输出电压纹波如图4。
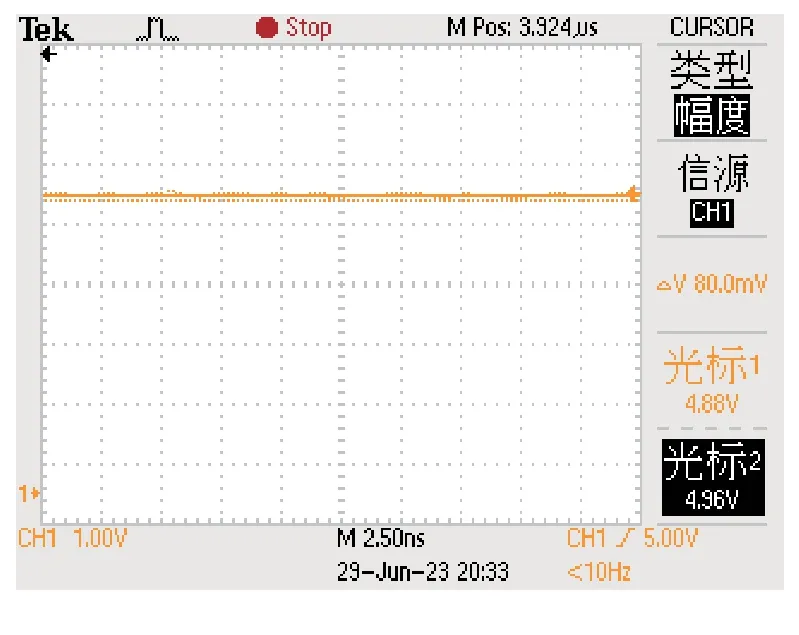
图4 输出电压纹波Fig.4 Output voltage ripple
2.3 485 通信电路
通信电路如图2 中T3部分。
面对井下较为复杂的环境,各个传感器节点之间存在很高的共模电压,485 通信虽是采用差分信号传输,但当共模电压超过RS-485 的承受极限电压,即超过12 V 或小于-7 V,接收器就无法正常工作,因此为保证测力仪信号传输的稳定性,提高抗干扰能力,同时考虑成本,采用DCDC 隔离电源将系统电源与RS-485 收发芯片电源隔离,通过光耦将传输信号隔离,从而消除共模电压影响。在485 通信收发芯片处,把芯片2 号接收使能引脚与3 号发送使能引脚连接在一起,一同连接到N 沟道场效应管的漏极上,构成自动切换收发的RS-485 电路。当发送端高电平时,mos 管导通,芯片的2 号脚和3 号脚接地,进入接收模式;相反,发送端低电平时,mos 管关断,芯片的2 号脚和3 号脚上拉至高电平,进入发送模式。在测力仪与通信电缆的接口处,对电路进行EMC 设计,G1为三端的气体放电管组成第一级防护电路,抑制线路上的共模以及差模浪涌干扰,防止干扰信号通过通信电缆影响下一级电路。RT1、RT2为热敏电阻组成第二级防护电路,保证气体放电管能顺利导通,泄放大能量必须增加此电阻进行分压,确保大部分能量通过气体放电管。TVS1、TVS2、TVS3为瞬态抑制二极管组成的第三级防护电路,同样消除浪涌干扰。
2.4 信号采集放大电路
信号采集放大电路设计如图2 中T4部分。
输入电源18 V 经DCDC 降压变换为5 V,5 V再经低噪声LDO 电压调节芯片LP5907MFX-1.8/NOPB,输出1.8 V 电压给弹性体以及运放芯片供电,当压力发生变化时,弹性体应变片也发生形变,从而阻值改变,根据惠斯通电桥原理,应变片两端的电压也发生相应的变化,输出0 到2 mV电压信号。因此需要进行放大处理,运放芯片选用TI 公司的高精度低噪声运算放大器TLV333IDBVR,采用差分放大的方式,将信号放大470 倍,再经过RC 滤波,信号输入至主控芯片ADC 采集管脚,为了提高ADC 转换的精度,ADC 基准电压源使用外挂的基准电压芯片ADR5040A,输出2.048 V 电压至主控芯片的外部基准电压引脚。同时选用低温漂10×10-6参数的放大电阻,抑制由温度引起的放大倍数漂移。
3 测力仪软件程序
3.1 主程序设计
主程序流程图如图5。
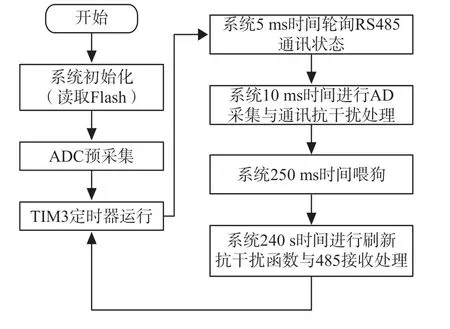
图5 主程序流程图Fig.5 Main program flow chart
上电后,读取Flash 存储程序,系统初始化包括看门狗初始化、Flash 初始化、系统各参数变量初始化、485 串口通信的整体初始化、ADC 全局变量的初始化、ADC 端口的初始化、ADC 采集模式配置初始化、定时器Timer3 的初始化、RTC 初始化,配合PB03 管脚短接恢复出厂设置,设置初始化标志位,将PB03 配置为输出高电平,系统上电时,首先判断标志位是否正确,再检测PB03 引脚的电平状态。各部分初始化完成后,ADC 开始预采集处理,系统定时器Timer3 开始运行,定义系统任务结构体,在不同的时间间隔内先后执行轮询485 通信状态、ADC 采集、系统抗干扰、喂狗、刷新抗干扰函数、开启485 通信接收中断,依次循环进行。
3.2 485 通信程序
485 通信程序设计如图6。
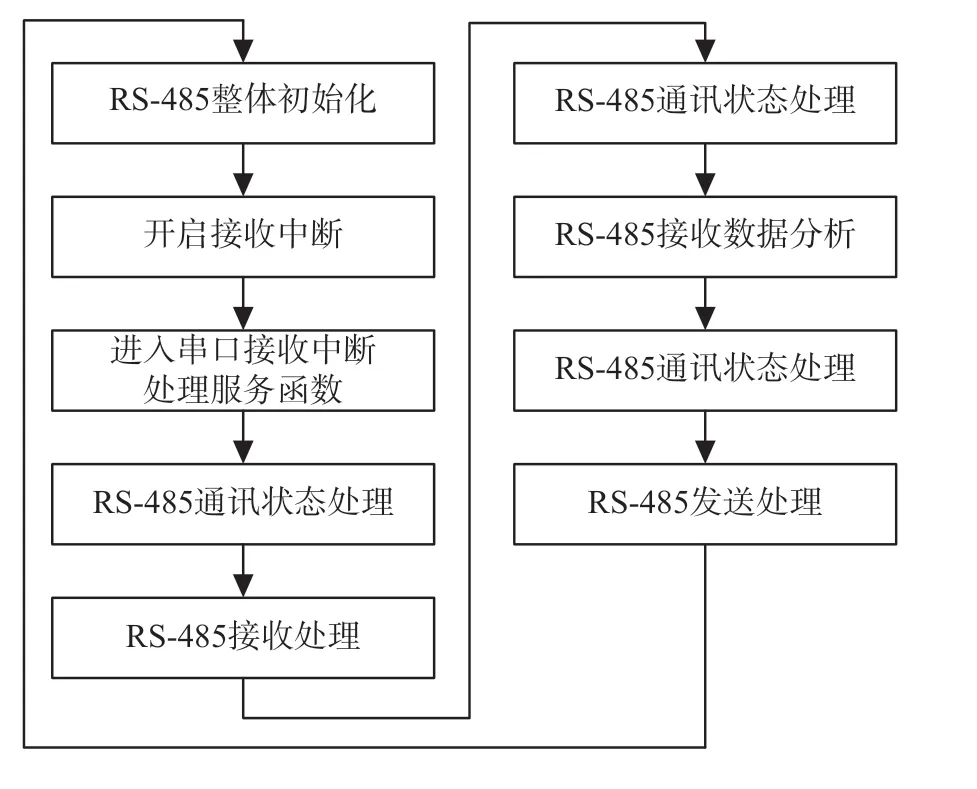
图6 485 通信流程图Fig.6 Communication flow chart
在系统初始化中其中对485 串口通信的整体初始化,开启接收中断,进入接收中断服务函数,判断数据接收是否完成,清除接收中断标志位,接收数据字节,把缓存寄存器中的数据放入变量数组中,获取串口通道通信状态,是否有接收帧错误标记,继续判断接收报文的起始符。转入485 通信状态处理,进入485 接收处理,串口时间计数清零,关闭接收中断,判断接收是否溢出及报文其他字节是否正确。转入485 通信状态处理,进入485 接收数据分析处理,进行指令解析,读取报文中的地址、系数、波特率、初值信息,设置地址、系数,调零和校准。再次转入485 通信状态处理,进入485 发送处理,将设置地址、系数、调零、校准成功或失败的信息,还有获取测力仪的实时数据一起发送到缓冲区等待发送,最后回到485 串口整体初始化,依次循环进行。
3.3 AD 采集转换程序
AD 采集转换程序设计如图7。
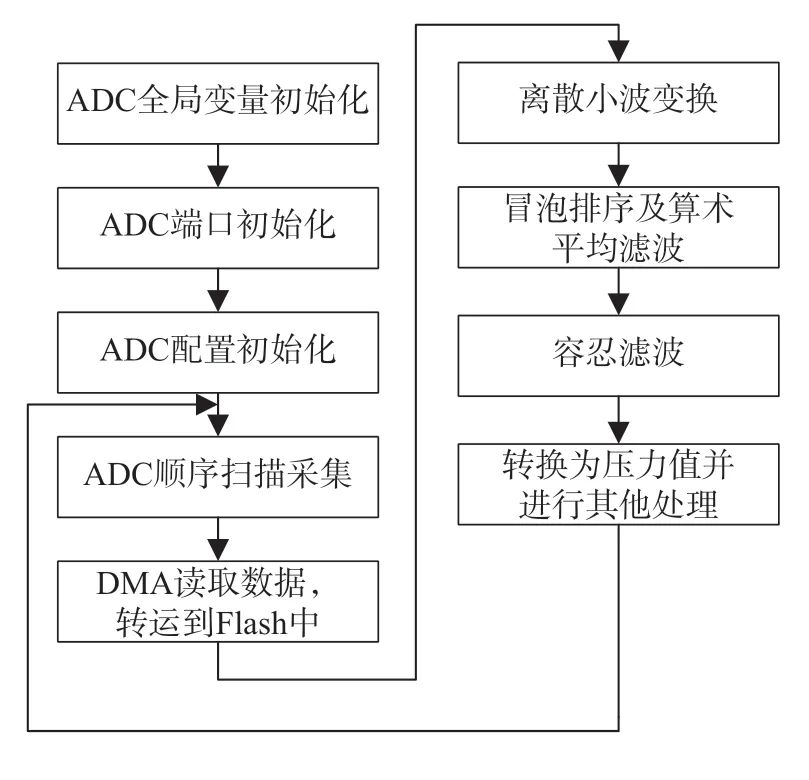
图7 AD 采集流程图Fig.7 AD collection flow chart
对AD 采集中的全局变量进行初始化,其中变量包含AD 转换计数、ADC 平均值计数、计算压力的ADC 值、压力值、先前压力值、当前压力值。ADC 端口初始化,ADC 配置初始化,开启ADC 顺序扫描采集,顺序扫描转换完成后,自动触发DMA 读取,将ADC 数据寄存器中数据转运到Flash 中,对存储的数据源进行小波降噪处理,具体实现过程在下一节中说明。得到的降噪数据再进行冒泡排序、算术平均滤波,将滤波后的数据转换为压力值,并进行后续的误差容忍处理、零值处理、极值处理,之后再次进入顺序扫描采集,循环进行。
4 小波降噪处理
4.1 小波降噪Matlab 仿真
对要去噪的信号建立一维信号模型,可以用如下形式表示:
式中:f(n) 为含有噪声的信号;s(n)为原始信号;g(n)为服从正态分布的高斯白噪声;n为离散采样点数。
针对含有噪声的一维信号,选用小波阈值降噪的方法进行降噪。
原始信号的采样点为2 000,加入高斯白噪声,获得信噪比为28.5 dB 的含噪信号f(n);选择对称性较好的Sym8 小波基函数,进行5 层分解,得到各层近似分量和细节分量。含噪声f(n)信号降噪分解公式如式(6):
式中:j为尺度参数;k为平移参数;为j尺度下的近似分量;为j尺度下的细节分量;h2n-k为尺度滤波器分解系数;g2n-k为小波滤波器分解系数。
含噪信号如图8,近似分量如图9,细节分量如图10。

图8 含噪信号Fig.8 Signals containing noise
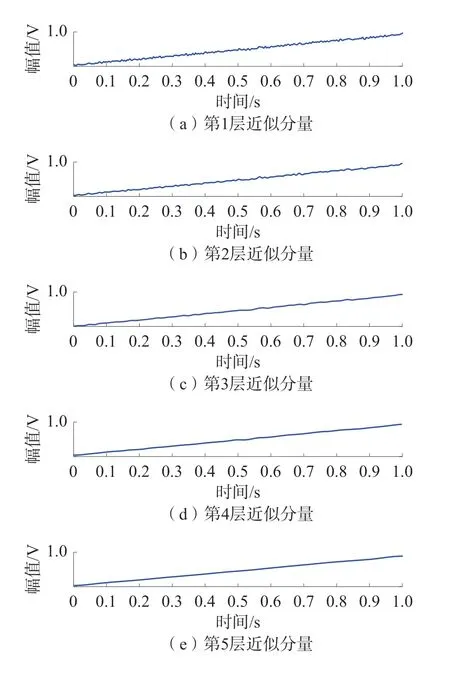
图9 近似分量Fig.9 Approximate component
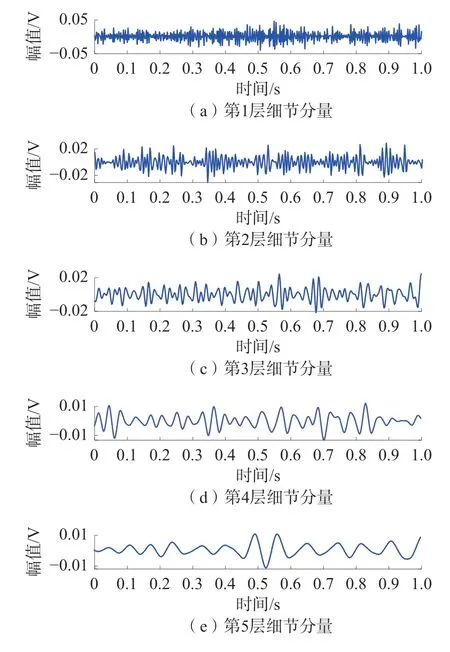
图10 细节分量Fig.10 Detail component
对于含有噪声的信号,其噪声分量主要集中在小波分解后的细节分量中,上述小波基函数和分解层数确定情况下,还需要选择合适的阈值的选择规则及阈值函数,去除细节分量中的噪声。选择Sqtwolog 规则确定阈值门限T,阈值T选取公式如式(7):
式中:T为阈值;N为信号的长度。
选择软阈值函数,对小波分解后的细节分量进行柔性处理,得到的细节分量整体连续性较好,从而使得处理后的信号不会存在附加震荡,软阈值下处理得到的细节分量公式如式(8):
对一维信号进行重构,重构公式如式(9):
利用小波分解得到的第5 层近似分量和经过阈值处理后的细节分量,进行一维信号重构,得到去噪后的信号,原始信号与去噪信号对比如图11和图12。
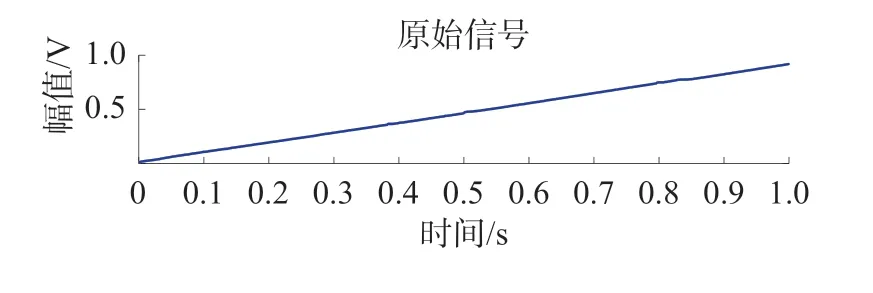
图11 原始信号Fig.11 Original signal
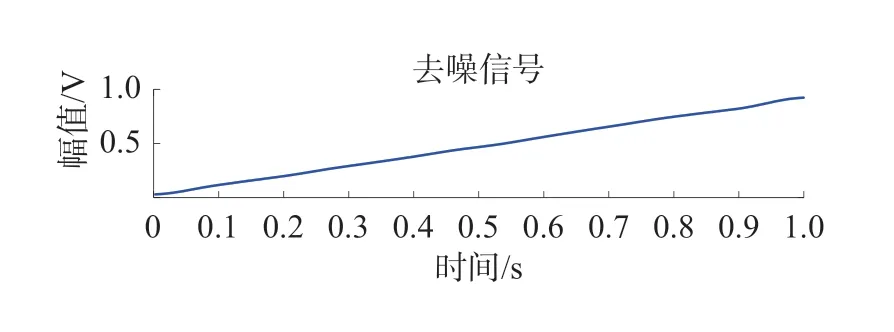
图12 去噪信号Fig.12 Denoised signal
计算去噪后信号的信噪比SNR 为43.7 dB,信噪比计算公式如式(10):
式中:x(i) 为原始信号;(i)为去噪信号。
计算原始信号与去噪信号之间的均方根误差RMSE 为1.25 ×10-5,均方根误差计算公式如式(11):
计算原始信号与去噪信号的波形相似系NCC为0.9,波形相似系数计算公式如式(12):
4.2 小波降噪程序
首先使能RTC 时钟,读取其中秒的数据,并对数据进行适当调整生成所需要的随机数,存放在一维数组s中,用来模拟高斯白噪声;将DMA转运到Flash 中的原始信号,存放在一维数组s1中;将生成的随机数数组与原始信号数据相加得到含噪信号,存放在一维数组s2中。
小波基函数选取Sym8,那么对应的低通滤波器小波分解系数、高通滤波器小波分解系数、低通滤波器小波重构系数、高通滤波器小波重构系数,分别存放在一维数组LD、HD、LR、HR 中;定义整型分解的级数m和小波分解高频系数的阈值T。
小波降噪程序由小波分解程序和小波重构程序组成。小波分解流程图如图13,小波重构流程图如图14。
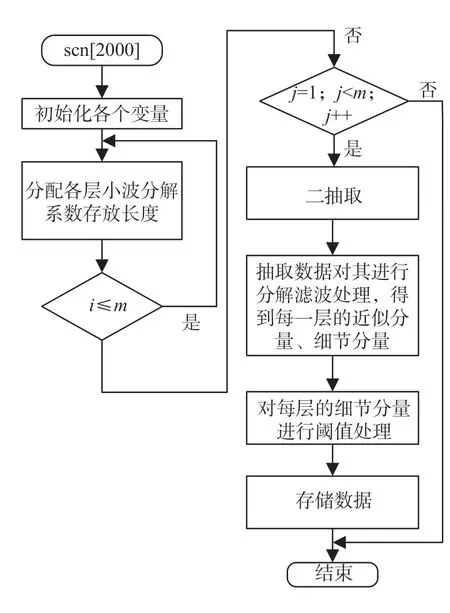
图13 小波分解流程图Fig.13 Wavelet decomposition flowchart
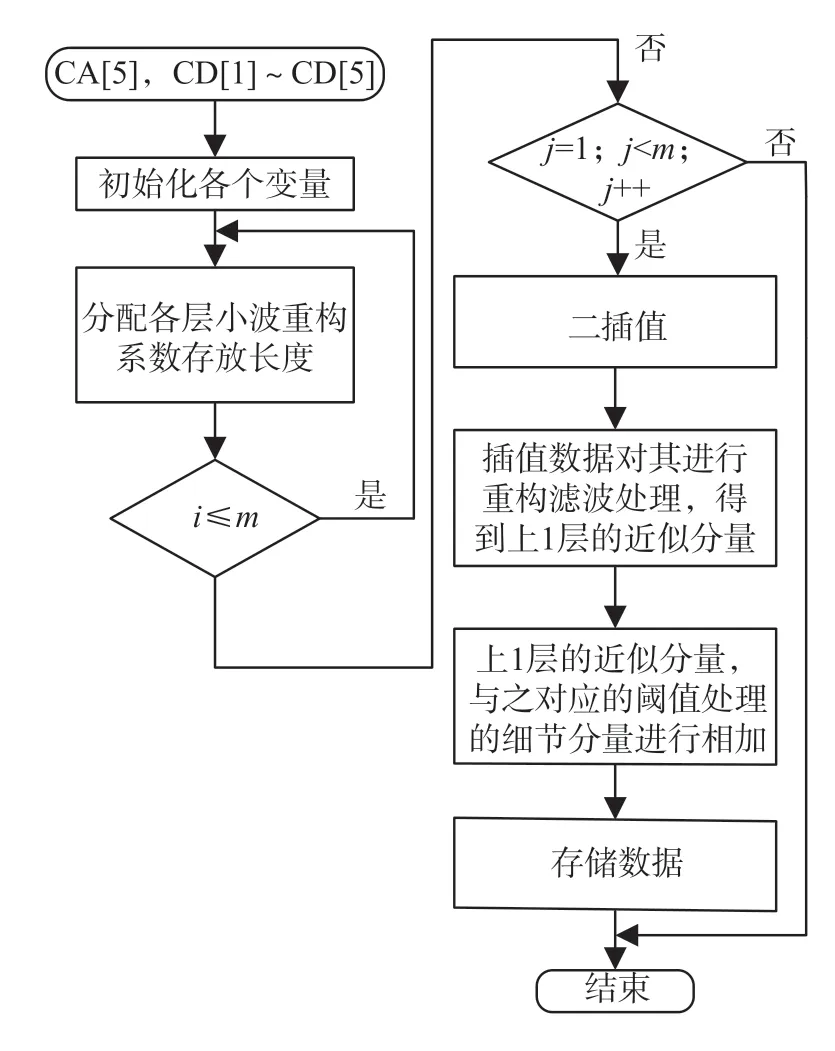
图14 小波重构流程图Fig.14 Wavelet reconstruction flowchart
初始化小波分解中的各种变量,分配各层小波系数存放的长度,每一层小波分解后的序列长度由原信号的长度和滤波器的长度共同决定,存放长度计算公式如式(13):
式中:L为各层小波系数存放的长度;S为原信号的长度;F为滤波器的长度。
第1 层分解时,分配小波分解的近似分量CA1、细节分量CD1,将含噪信号进行信号边沿对称延拓与抽取,分别与低通滤波器小波分解系数、高通滤波器小波分解系数相乘再相加,再对含噪信号进行延拓与抽取,与滤波器系数相乘再相加,得到小波分解的近似分量CA1、细节分量CD1数组结果。依此类推,每一层分解对信号的抽取是上1 层的近似分量,循环的次数取决于每一层分解后得到近似分量或细节分量的数组长度和滤波器长度。第5 层分解完后,将得到的小波分解的所有细节分量进行阈值处理。
将小波分解第5 层的近似分量CA5,以及经过各层分解阈值处理的细节分量CD1到CD5,分别与低通滤波器小波重构系数、高通滤波器小波重构系数相乘再相加,进行一维小波重构,得到去噪信号。
5 测力仪打压测试
将测力仪放置在压力实验平台下进行0~500 kN打压测试,并分别在0、25、40 ℃环境下进行试验,通过锚杆锚索调试工具上位机软件进行设置读取,测试连接示意图如图15。
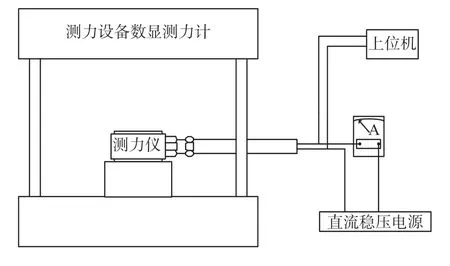
图15 测试连接示意图Fig.15 Test connection diagram
测试步骤如下:
1)参数设置。设置串口号为COM3,设置波特率为1 200,校验位为NONE,数据位选择8,停止位选择1。
2)调零。鼠标选中调零按钮,地址设为01,通道设为01,校准值设为000000。
3)校准。鼠标选中校准按钮,地址设为01,通道设为01,校准值设为250 600。
4)发送数据。鼠标选中获取实时数据按钮,进行相对于实际值的测试。测力仪试验测量数据见表2。
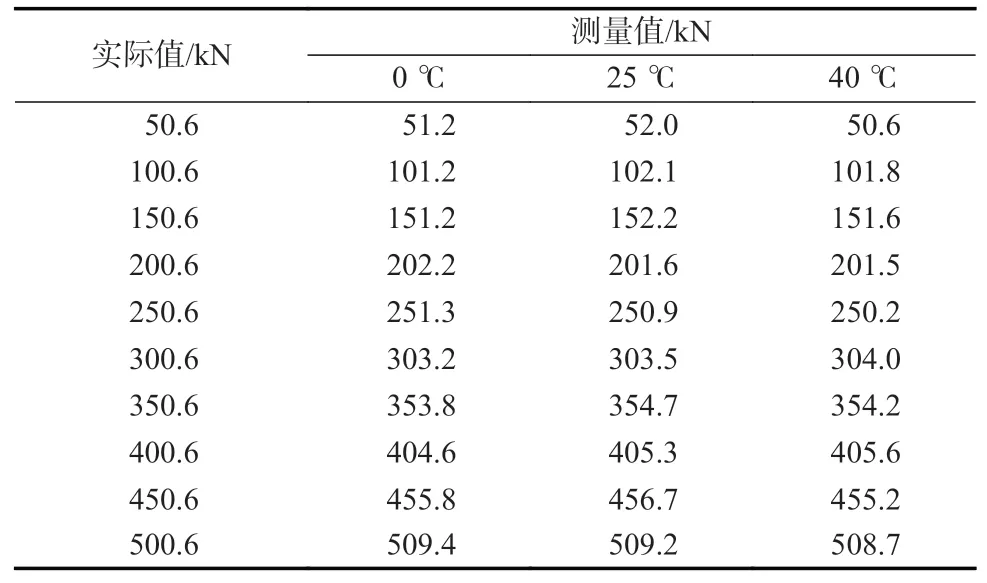
表2 测力仪试验测量数据Table 2 Experimental measurement data of dynamometer
通过试验测量的数据来看,基于小波变换的锚杆锚索测力仪随着实际压力的增大,测量的误差也逐渐增大,最大误差为8.6 kN,达到企标规定的三级仪表精度,实际值与测量值误差最大允许15 kN,采集可靠、数据传输稳定,满足煤矿巷道围岩应力的监测需求。
6 结 语
基于小波变换与HC32L176KATA 单片机设计了锚杆锚索测力仪。介绍了测力仪硬件电路和软件程序,及小波降噪处理技术。锚杆锚索测力仪采用的小波变换算法处理含噪信号,是传统滤波器所不能比拟的;通过Matlab 仿真与实际测试表明:小波变换可以有效地去除含噪信号中的干扰成分,提高了有用信号的采集精度,算法简单,可靠性高。此外锚杆锚索测力仪选用国产华大单片机作为主控芯片,成本降低且供货稳定,与485 通信、AD 采集配合,提高了测力仪传输的可靠性和采集精度。
