基于单片机的智能越障探测小车系统设计
2024-03-04杨瑞丽王俊仃陈冉冉
杨瑞丽,王俊仃,陈冉冉
(商丘工学院信息与电子工程学院,河南商丘 476000)
1 引言
随着人工智能的快速发展,智能车辆的应用领域日益广泛。智能车辆是集传感器识别模块、智能控制模块和驱动模块等为一体的智能系统[1],是无人驾驶领域的研究热点。其中的智能小车是以电动小车为载体,属于一种移动地面智能车,涉及电子技术、计算机、自动控制、信息技术、人工智能等领域的最新技术[2],是智能汽车的典型代表之一。智能探测车可以分为自主式和非自主式。自主式智能探测车可以依靠自身系统独立导航、避障,独立执行不同的探测任务;半自主式智能探测车可在人类操作员的监督下自主运行,操作员可在遇到车辆困难时进行远程干预。智能探测车辆通常配备各种传感器,可适用于各种工作环境,承担人们较难执行的探测任务。智能探测小车具有体积小、反应快、生存能力强、成本低、机动性好等特点,它可以移动到固定机器人无法到达的指定地点或危险系数较高的环境,如户外勘探和考古挖掘、军事领域等,因此具有很大的应用价值和现实意义。
2 系统设计
2.1 系统硬件设计
系统的控制核心是单片机,其他硬件主要包括信号检测模块、驱动模块和摄像模块。其整体设计框架如图1 所示。

图1 系统的整体设计框图
单片机模块采用STC89C52。作为控制核心,它是一款能耗要求低、可移动存储、可编程、高性能集成的CMOS 8 位和8k 字节的只读存储器。此外,STC89C52 是一个基于静态逻辑设计的芯片[3],工作时频率归零,支持两种软件选项的电流节约模式。当中断RAM 和定时器的串行电压测量接口并中断系统的正常工作运行过程时,CPU 在非活动模式下停止运行。下行模式存储帧的内容,会冻结振荡器,直到下一个硬件重新启动其它芯片功能。
驱动模块中,系统采用的是H 桥驱动电路。L298N 是一个高电压、高功率的H 电桥,作为驱动电路进行工作的驱动元件[4],拥有一个控制终端。它具有输入频率高、静态电流损失小、输出工作电流大、电路设置简单、散热稳压效果好、不易变形燃烧等多种特点。它的速度可调节,具有很强的抗干扰能力,可以单独控制两台直流发动机,并且能够单独控制直流发动机[5]。
信号检测模块向前方介质发出一束红外线,在前方一定的距离空间内,红外线如遇到其他障碍物便会快速被该物体反射,红外线反射信号可实时通过红外接收管来检测到。通过合理调整红外发射管的安装位置,接收管可确定车辆运行时与前方障碍的距离[6-7]。红外接收器通常安装在车辆前端,可串联安装。此模块成本低,安装方便,运行时响应速度快。
摄像模块采用单独的无线摄像装置,通过摄像头把智能小车前方的环境信息发送到所连接的便携式终端,比如手机。手机终端可通过Wi-Fi 功能与摄像头模块直接相连,以此可使操控者实时掌握小车所探测地域的环境信息。
2.2 系统软件设计
整体的软件设计是采用两个计数器溢出中断信号来自动计算两个障碍物间的距离。其中一个是T0计数器溢出中断,当与障碍物距离远且超过既定间隔时,中断功能将会用于重新设置标志位;另一个是T1 开关中断,用来检测道路障碍物、及时评估道路状态和改变车辆方向的时间间隔[8],以便车辆能够及时避开障碍物。系统总体设计流程如图2 所示。

图2 整体设计流程图
对于信号检测子模块,在软件设计中,需要小车系统的探测原理。红外探测器向前方发出红外线光,遇到障碍物后光线会被反射回来并被红外光接收器接收,根据接收到的光线强弱进行信号的反馈。假设前方有障碍物,光电开关产生低电平信号,并将信号传输至单片机,由单片机进行处理后再产生指令,并将指令传输至驱动模块。这时车辆会按照相应程序向右或向左行驶,以避开障碍物。红外检测流程图如图3 所示。

图3 红外检测流程图
驱动子模块主要采用两个直流电机实现相关功能,通过改变电机两端输入电压的相对极性来实现正反转电流的控制,从而实现对直流电机的运行状况的控制。自主避障流程图如图4 所示。
3 系统实现
经过反复调整和测试,系统正常工作。当遇到前方障碍物,会自动调整转向,图像传输正常稳定。硬件电路调试的实物状况如图5 所示。
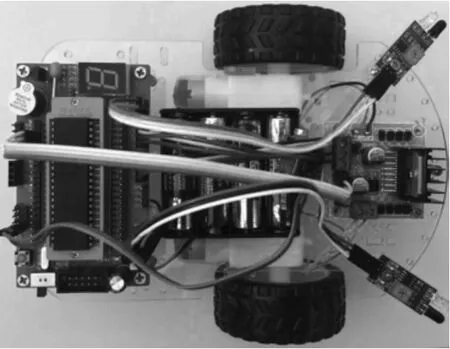
图5 硬件电路调试实物图
当小车左前方遇到障碍物时,左前方信号检测模块LED 灯全亮,显示情况如图6 所示。

图6 信号检测模块检测到左前方障碍物
当小车右前方遇到障碍物时,右前方信号检测模块LED 灯全亮,显示情况如图7 所示。

图7 信号检测模块检测到右前方障碍物
将摄像模块与单片机相连。当摄像模块正常工作时,手机通过Wi-Fi 与摄像模块相连,然后打开手机安装好的应用软件WiFi View,可实时查看小车所拍摄的环境信息。手机查看图像界面如图8 所示。

图8 手机查看图像界面
至此,该智能小车越障探测系统的设计功能得到完好的实现。
4 结束语
整个系统以STC89C52 单片机作为主控芯片,以红外探测装置作为信号检测单元,再辅以电源、驱动等多个功能模块,实现了系统的稳定独立运行。通过红外传感器和STC89C52 芯片独特的微机功能以及PWM 技术实现控制发动机转速的功能。此外,采用能够进行图像无线传输的RT5350 Wi-Fi 摄像模块,确保在陌生环境条件下,操控者可以运用所配套的手机终端远程查看现场图像。整个小车系统反应灵敏、性能稳定,具有较好的研究价值和应用前景。
