浅析探地雷达技术的发展历程
2024-03-04姚振岸陈龙凤王向腾李红星陈振昊
任 望,姚振岸,陈龙凤,王向腾,李红星,陈振昊
(东华理工大学地球物理与测控技术学院,330013,南昌)
0 引言
随着我国经济的不断发展,工程建设和城市发展的需求日益增长,进而对于浅地表工程的勘探也有了不断迫切的需求,比如城市道路和高速公路的危害检测、城市地下管线的查找和定位、工程质量和建筑结构的质量检测及矿产勘探和灾害地质调查方面等。针对上述的浅地表工程勘探的项目需求,探地雷达技术作为一种有效且经济的地球物理勘探技术能够很好地解决上述的工程需求。
探地雷达(Ground Penetating Radar,简称GPR)是以地下介质的介电常数和电导率等物性参数差异为基础,通过发射天线在地面发射高频电磁波信号,信号在地下介质中进行一系列的传播后被接收天线所接受,根据处理、分析与解释所接收到的电磁波信号的振幅、波形、频率等运动学和动力学特征来查明介质内部物性特征和分布规律,其原理示意图如图1所示[1]。与探空雷达不同,探地雷达使用的频率较低,其主要研究是电磁波在介质中的传播,由于地下介质的各向异性和不均匀性等,因此,探地雷达研究的复杂程度相较于探空雷达更加复杂。探地雷达技术是一门集高精度、高效率以及无损等众多优点的地球物理勘探方法,但作为一种地球物理勘探方法,自身也是存在着一定的缺陷,限制探地雷达在各方面的应用,探地雷达的优越性和局限性详见表1。因此,在对于探地雷达技术勘探的选取和应用时,要确保勘探要求和目标具有一定的针对性,而不是盲目选择使用。自20世纪90年代末开始,我国开始重视探地雷达技术,并投入大量的研究。之后,随着计算机技术和电子科学的飞速发展,探地雷达技术也逐渐趋向成熟,不仅在理论技术、仪器制造、实际应用和数据解释等方面有重大的突破,而且其应用范围也在不断地扩大,如应用在地质、军事、环境和工程等领域。
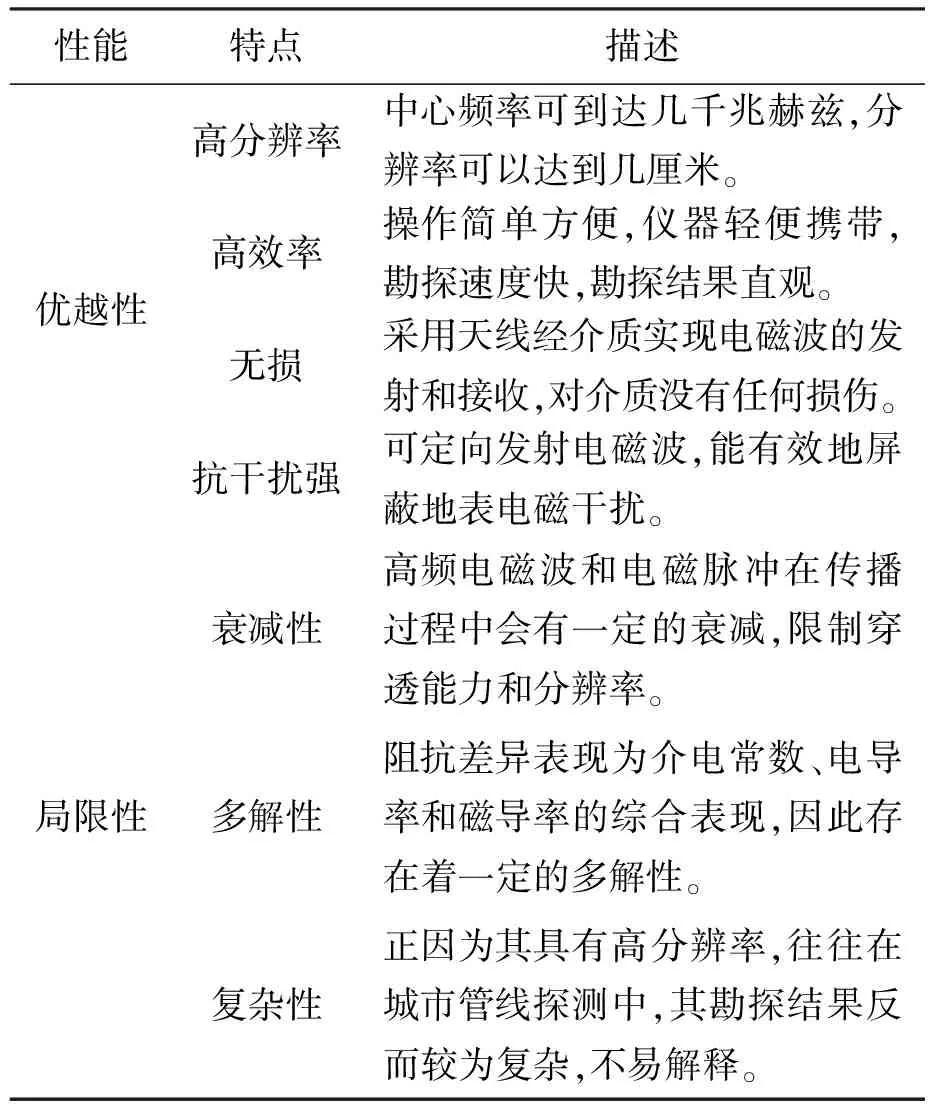
表1 探地雷达的性能

图1 探地雷达原理示意图[1]
1 探地雷达技术的发展
关于探地雷达技术领域的研究最先起步于国外,且在20世纪初就有相关的学者开始具体的研究。1904年,德国学者Hulsemeyer第一次利用电磁波信号来探测地下预埋的金属物体的位置,这一项实验也被后人认为是探地雷达的首次应用[2]。1910年,Gottheif Leiback和Heinrick Lowy首次使用连续的电磁波对地下预埋物体进行探测并正式提出了探地雷达技术的概念[3]。1926年,Hulsenbeck首次提出并使用电磁脉冲来对地下介质进行勘探,并得出电磁波在介电常数变化的界面会很容易产生反射这一理论[4]。1929年,德国物理学家Sterm首次利用电磁脉冲进行冰川厚度的探测研究,虽然勘探结果不尽人意,但却为后面的地层厚度探测工作提供了实验基础[5]。1937年,Melton提出的脉冲雷达系统标志着探地雷达技术的系统化发展。在之后的二十年时间里,探地雷达的实际应用发展却很慢[3],其主要原因是地下介质情况较为复杂,电磁波在介质中传播时有很大的衰减,也限制了电磁波的穿透能力,并且当时使用的设备也较为落后。直到20世纪60年代左右,探地雷达技术重新被学者和研究家们重视起来,并投入大量的时间和精力致力于探地雷达的研究工作中。1960年, Cook研究员使用脉冲雷达在矿井中做勘探实验并取得了不错的解释成果,也因此研发一套较为完整的探地雷达系统[4]。1968年,MIT专门为军队研发了一套可用于检测地下坑道的雷达系统,在后来的使用中也受到了军队的青睐[5]。1978年,Unterberger等也尝试将探地雷达技术应用在介质盐层的探测中。之后,随着计算机技术水平的不断提高和对探地雷达技术的大量研究,探地雷达技术有了突飞猛进的发展,同时这一时期也涌现出一大批探地雷达设备研发制造公司。21世纪初,随着数字化探地雷达系统的研发成功,解决了探测数据存储难题,加快了数据处理速度,提高了工作效率,因此,探地雷达技术也开始应用在各行各业中,如工程地质探测、地下矿产资源探测、考古检测、水文探测、道路以及城市管线探测领域。Chan等[6]使用探地雷达对浅水层下目标的识别,勘探结果表明有着良好的识别能力。 Young等[7]使用探地雷达技术成功地识别地下的金属管线和非金属管线并确定其位置和管径等。
相对于国外来说,我国对于探地雷达技术的研究起步较晚,开始于1980年,研究初期主要是依靠从国外引进或买入的探地雷达设备。1985年,铁道部引进一台SIR-8型探地雷达和市政部引进一台SIR-3型探地雷达,并进行相关的实验研究工作[8]。1990年,中国地质大学首次引进加拿大公司的EKKO-IV型探地雷达并用于一系列的研究中,这也为我国的探地雷达技术积累了宝贵的经验[8]。国内的研究探地雷达技术的主要地方是各个省的高校和研究所,如中国地质大学、东南大学、北京遥感设备研究所等。1993年,方广有等[9]研究了探地雷达脉冲在土壤中传播时的失真特性,并指出了引起该特性的原因和如何恢复原波形的方法。1998年,徐兴新等[10]将探地雷达技术应用在堤坝隐患探测中,其应用结果表明,该技术能够很好地查明堤坝中的多种隐患(如洞穴、裂隙和蚁巢)的位置和规模,且还将该技术推广于探测库底土工膜和蓄水区塌陷位置。2002年,刘敦文等[11]将探地雷达技术应用在古墓完整性的探测中,其探测结果表明,该技术能够较准确地查明古墓的地下形态、结构与规模情况并得出土层速度的不均匀性有时会影响结果精度的结论。2015年,刘澜波等[12]详谈了探地雷达在几个基础地学与工程技术邻域中的应用、评述了探地雷达技术的变异形式(如钻孔雷达、探月雷达)并强调了该技术是浅地表地球物理科学的重要工具。2022年,曾雄鹰等[13]提出一种基于双主频高动态探地雷达检测系统并应用于道路病害检测中,该双主频检测系统兼顾了探测深度和纵向分辨率,能够很好地识别地下病害类型、位置、埋深及影响范围。
2 探地雷达正演的发展
探地雷达的正演模拟技术是指在给定初始条件和边界条件下求解方程的问题,即给定介质模型和相关物理参数条件下,研究探地雷达系统发射的波在介质模型中的传播规律并计算在地面所接收到的电磁场信号的一种技术。正演模拟技术能够获得地下介质中异常体在地表的反射波形态,能够从实测剖面上观察出异常区域,进而进行实测数据的处理和解释,因此,正演模拟技术是探地雷达的核心内容。
探地雷达的正演模拟方法主要分为射线追踪法和波动方程法。射线追踪法[14]是把电磁波波动理论简单化为放射线理论,其原理是雷达波发射的运动学基础理论。这种方法有着运算方便、适应性强、计算速度快等优点,能够直观反映电磁波的几何传播路径的优点,但由于缺少雷达波相关的动力学信息,无法体现出电磁波的运动学特征。因此,现如今占据主流的正演模拟方法是波动方程法。波动方程法[15]以电磁波的运动学特征为基础,运用数学上比较完善的理论方法来解决雷达波的微分方程。波动微分方程的运算中通常会包含比较多的波动性变化信号与波场介质参数,可为模型的求解和处理提供了良好的凭证,使得波动性微分方程正演仿真方式在探地雷达正演仿真中具有绝对的主导地位。然而,波动方程法中最为广泛使用的2种方法为有限差分法和有限单元法。
时域有限差分法(Finite Diffience Time Domain,简称FDTD)是探地雷达正演模拟最原始的数值计算方法,其基本原理[9]是通过麦克斯韦方程组,利用二阶和高阶的差分方程近似将旋度方程中的微分格式全部转换为差分格式,再根据经过转换后的边界条件方程和初值条件方程,从而能够对连续的电磁场的方程进行离散求解。YEE[16]在其所撰写的《各向同性介质中麦克斯韦方程组初边值问题的数值解》论文中指出利用YEE氏网格的空间离散,将麦克斯韦方程组转变成了有限差分的格式,自时域有限差分法被提出后,该技术便在探地雷达正演模拟中获得了普遍的运用。1975年,Taflove等[17]使用瞬态麦克斯韦方程组求解稳态电磁散射问题。1981年,Mur[18]提出Mur吸收边界从而能够解决使用有限差分技术求解电磁场方程时有角所引起的场奇异性问题。1990年,Luebbers等[19]提出一种与高度分散材料(如雪、冰、等离子体等)频率相关的时域有限差分公式。2006年,刘四新等[20]提出一种全新的时间域有限差分算法,该算法能够计算出介电常数并且随频率变化满足Debye关系的频散介质中麦克斯韦方程。2009年,冯德山等[21]提出了一种探地雷达时域多分辨正演模拟方法,并推导了三维DB2-MRTD法的差分方程,并且还设计出小波域探地雷达三维偏移处理算法。2009年,吴丰收等[22]应用高阶时域有限差分法时,使用各向异性完全匹配层作为吸收边界条件,在处理不同复杂介质中分布的信号上,可以很好地表现信号的细微变化。
有限单元法(Finite Element Method,简称FEM),其基础是变分原理和加权余量法,其基本求解思想是把计算域划分为有限个不规则单元,在每个单元内,选择单元上的节点作为插值点,将微分方程中的方程式改写成由各节点值和插值函数组成的表达式,最后对该表达式进行求解。有限单元法最初是应用在固体地球学领域中,但随着正演技术的进一步研究发展,部分学者开始尝试把有限单元法运用到地球物理学中,并首先运用在地震波相关的正演模拟领域。1982年,杜世通[23]首次使用有限单元法来处理不均匀介质的波动方程并取得了较为准确的数值解,同时还提出了一维和二维波动方程有限元数值解法数学原理。由于雷达波与地震波传播原理较为相似,所以较少数学者也开始试着将有限单元法应用于探地雷达的正演模拟中。1994年,沈飙等[24]根据雷达波波动方程与地震波波动方程的一致性,首次将地震波正演处理方法应用到探地雷达中,并取得了不错的正演结果,为探地雷达有限单元法正演技术奠定了一定的理论基础。2001年,Faning和boothby[25]在利用探地雷达技术对拱桥进行检测时,使用了三维有限单元法正演技术并取得了较好的检测结果。1999年,底青云等[26]使用麦克斯韦方程组的同时考虑到了其衰减项,对大量的复杂地电模型进行有限单元法正演模拟。2003年,谢辉等[27]使用二十节点等参数单元对实体模型进行三维有限元计算并且还依此建立了电磁波全反射传播的正演模型。2011年,陈承申[28]根据麦克斯韦方程组,详细推导了探地雷达的有限元波动方程并介绍了探地雷达二维有限元波动方程数值解的方法原理。
3 探地雷达反演的发展
探地雷达反演是指根据所测得的雷达数据,用相关的数学方法进行推算地下介质物性参数以及建立介质模型。目前,我国在探地雷达领域的反演方法主要分为基于射线的层析反演和基于波动方程的全波形反演2种,且2种方法理论技术均为不成熟。
1980年,Dines等首次将计算机断层扫描技术应用到地球物理勘探领域并提出了层析成像这一概念,这也为今后的探地雷达反演技术提供了一定的理论基础。Mangué[29]等提出一种基于探地雷达首波的旅行时间的井间层析成像反演的新方法,该方法考虑了地质结构,并能依靠较少的物性参数进行反演,对地下介质中的界面位置和倾角等有着较好的识别效果。2013年,杜翠等[30]提出运用探地雷达层析成像技术进行复垦土壤的层次检测,并构建了介质波速模型,其研究结果表明,反演的准确率较高,使用效果较好。2014年,杨峰等[31]建立一个典型的金属矿区速度模型,并在有代表性的切片上使用层析成像算法进行反演计算,其反演结果表明,误差控制在1%之内。近年来,随着工程建设的需要和各种反演方法的不断改进和完善,层析成像反演技术应用的场地较为多样性,并且能够具有解决实际工程问题的能力。
反演问题分为线性反演问题和非线性反演问题,前者在解决问题中困难较少易解决,而后者在解决问题中较为复杂难解。一般的复杂地质反演问题均属于非线性反演问题,因此,为了在解题中减少问题的出现和复杂度,一般会将该类问题做近似线性化处理。早期的线性近似方法有Born法和Rytow法[32]。2004年,Cui等[33]提出当介质特性相差较大时,利用Born近似法进行求解较为困难甚至完全不能解决。2015年,Backus等[34]提出一种逐步线性化的方法,形成较完善的BG反演理论。同年,Métivier等[35]提出一种将Born迁移算子设计用于求解线性化逆问题的渐近算子与全波形反演相结合的算法。将非线性化问题做近似线性化处理虽然能够降低难度和减少运算量但却不能够满足高精度要求。为了处理更加复杂的地质环境和满足高精度工程要求,许多学者不得不开始着手研究非线性反演方法。2015年,雷林林等[36]使用时间域全波形反演算法对地下相对介电常数进行反演,并将反演后的地下相对介电常数模型作为逆时偏移成像的初始速度模型。2017年,Guan等[37]利用基于遗传算法的雷达数据进行全波形反演进而对石灰岩的进水情况进行检测并取得不错的结果。2019年,张崇民等[38]将全波形反演技术应用到隧道施工领域中,对不良地质体建立数值模型和反演运算,最后也取得了不错的效果。
4 人工智能应用探地雷达技术的发展
人工智能(Artificial Intellgence,简称AI)是用于模拟和延展人类智能的理论与思维的一门新的技术科学。人工智能的主要功能是通过研究人类的活动规律和思维变化,使得该系统具有一定仿人的能力,通俗的讲就是研究如何让计算机去完成以往需要人的智力才能胜任的工作。1956年,麦卡赛和明斯基等众多科学家共同研究如何用机器来模拟人类智能的一系列相关问题,并首次提出人工智能这一概念。在此之后,人工智能技术领域取得了突飞猛进的发展,也广泛地应用于各个学科领域。随着计算机的发明,计算机也逐渐被科学家变成来模仿人类思维的工具。
随着人工智能的兴起,一些地球物理专家开始试着将此项技术应用到地球物理中,看是否能够促进物探方法的发展以及解决一些人为无法求解的难题等。21世纪初左右,国内外的学者开始将人工智能应用在探地雷达领域中,主要是解决一些道路检测和雷达数据图像识别问题等。2000年,王群等[39]利用Welch功率谱来提取探地雷达所获取的目标信号特征,并将该特征用于训练LVQ神经网络,成功地实现了对探测目标的分类且还能达到实时处理数据的能力。2004年,刘敦文等[40]提出了一种用于隧道探地雷达信号解释的BP神经网络模型和算法,在对隧道衬砌厚度进行实际探测后,结果表明该方法有着较高的工作效率和解释精度。2007年,希腊Loizos等将人工神经网络技术应用在沥青混凝土刚度的评价中,有着良好的效果[41]。2009年,意大利Caorsi等[42]将人工神经网络应用在道路灾害探地雷达检测诊断中,根据解释成果对异常区进行实地深挖检查,最后表明正确率较高。同年,我国邹华胜等[43]应用支持向量机方法,通过建立向量机回归模型和计算研究,实现了对油田储层厚度的预测和计算。2010年,杜攀峰等[44]提取各种铁路路基病害的特征,通过学习向量化神经网络模型来识别路基的各种病害类型。2012年,甘建强等[45]将改进后的BP神经网络应用到探地雷达图像识别技术中,其结果表明BP神经网络能高效且准确地自动识别雷达图像里的异常图像。同年,胡浩帮等[46]将Faster R-CNN算法应用在探地雷达对管线的智能识别中,其结果表明该算法较传统图像识别方法有着抗干扰能力强,运行效率高等优点。2013年,法国Bastard等[47]将支持向量机应用在探测地面厚度的应用中。同年,南昌大学项雷[48]也实现了支持向量机应用在公路检测探地雷达图像的自动识别。以及周辉林等[49]也应用支持向量机到自动检测高速路基的病害中且检测的结果正确率达到了92.7%。2014年,上官鹏程等应用人工神经网络到提取沥青路面密度中,其结果数据表明该方法具有实用和高效性[50]。2015年,美国E.Besaw等[51]率先使用深度卷积神经网络(CNN)来提取和分类探地雷达B扫描中包含的复杂特征。2016年,Li等[52]将随机霍夫变换算法(RHT)在不同中心频率下应用在雷达剖面中树根的识别中,实验结果表明准确识别率达到了80%。2017年,郑晶等[53]提出一种探地雷达图像分割方法并详细介绍了该方法实现的步骤。这种方法是利用聚类思路将雷达图像进行分割,放大异常图像区,舍弃正常的图像且无需大量的训练数据,便能实现精确提取目标。2019年,Lei等[54]将Faster R-CNN算法应用于灰色GPR-B扫描图像中识别双曲线特征,然后将提取检测到的区域转换为二值图像,根据提出一种新的双聚类搜索估计算法(DCSE)将目标点相互分离,进而实现双曲线特征的识别。同年,Kang等[55]开发一种基于追踪的背景过滤算法并建立深度卷积神经网络,然后将其应用在三维探地雷达数据的自动分类地下物体中,并且还能实现快速和全自动的数据解释。2020年,Lei等[56]提出自适应目标区域检测算法(ATRD)和卷积神经网络长短时记忆框架(CNN-LSTM),并将ATRD应用于从包含双曲线特征的B扫描中提取区域,将CNN和LSTM网络结合起来提取双曲线区域特征从而达到地下圆柱物体检测以及直径识别。
5 总结与展望
目前,国产探地雷达系统产品均有着良好的用户使用反馈,且该产品也能够满足绝大部分的工程需求和实验精度要求。但相比较于国外的仪器产品,仍存在着一定的差距。在面对一些高难度和高精度需求的工程和实验上,用户所使用的仪器大部分还是进口产品,如SIR系列、MK系列等,但同时也会带来价格昂贵和售后不易等难题。综上所述,国产探地雷达系统的前景还是非常广阔的,但仍需要大量的研究、实验和应用使得该产品向着更智能、更简便、更高精度、更高性价比的方向发展。
目前,探地雷达的正演模拟技术得到了许多学者的广泛关注,时域有限差分法和有限元法2种正演模拟方法在实际应用中均有着各自的优缺点。时域有限差分法在目前算是使用率最高、理论技术最为成熟的正演技术,但由于采用较为规则的网格单元,不能很好地模拟复杂的结构。然而有限单元法能够采用非结构化网格剖分,对一些复杂的结构进行正演模拟,但该方法所生成的系数矩阵和稀疏方程组的求解较复杂且量多。所以,在未来为了满足高精度和高效率的条件,可以将各种正演模拟方法优缺点互补,开展一系列的混合算法进行探地雷达的正演模拟,这也将会是未来探地雷达的正演模拟技术的发展与主攻方向。
同时,探地雷达的反演模拟技术也同样备受关注。探地雷达层析成像技术的横纵向分辨率较高,但其误差会随着速度结构的复杂程度而增大,特别是遇到一些较为不好的界面如陡峭界面时,其反演的结果受干扰较大从而导致精度的差异。全波形反演算法有着精度较高的优点,但因其算法终究还是非线性算法,其反演的结果是不稳定的,在实际应用中表现还欠佳。总之,在探地雷达的反演领域中,还需要不断地提出、改进和联合反演算法使得反演结果有着更高的精度、更快的效率和更好的稳定性。
从人工智能应用于探地雷达技术的研究进展中可以看出,在探地雷达领域内已经开始伴随着人工智能和机器学习的掺入,大部分的应用研究目标领域是能够自主对雷达图像进行分析并找到异常区域以及自主分类,并作进一步的解释以及对地下目标体的大小、位置和形状进行测量与分析。目前,已有大量的关于人工智能与探地雷达相关结合的研究,研究阶段也从“人能做、AI能做,但AI没有人做的好”的阶段开始向“人能做,AI能做,AI做得比人好”的阶段飞速发展,但其研究的最终阶段是“人做不到,但AI能做”的阶段。因此,前方仍然需要更多的专业研究学者和技术专家的不懈努力,使得探地雷达系统在有了人工智能的加入后,不仅是能够对雷达图像进行自主分析,而且是拓展到探地雷达技术的各个方面。
从上述篇幅的论述中可以知道,探地雷达的各方面技术已经逐渐趋向于成熟,技术研究、数据的处理和解释等方面也在不断地进步,应用的领域也在不断地扩大。随着探地雷达的影响不断增加,各国的研究学者也将会把目光聚焦在探地雷达技术领域的未来发展研究中,不断地更新和研发技术,但同时也会将面临更大的难题和挑战。
