翻背式助老电动床设计与研究*
2024-03-04王建波赵南生
樊 辉,王建波,赵南生
(1.南通职业大学 机械工程学院,江苏 南通 226000;2.南通大学 工程训练中心,江苏 南通 226000)
0 引言
随着社会经济飞速发展和城镇化进程推进,城乡人口老龄化问题成为我国人口结构转变过程中的显著特征[1]。截至2018年末,60岁以上的老年人口约为2.49亿人,占总人口比重的17.90%;65岁以上的老年人口约为1.67亿人,占总人口比重的11.90%[2]。社会老龄化程度加深,青壮年因为学习、工作、婚姻等原因离开家庭,老年人自主生活难度大大提升。为了提高老年人生活的安全性和便利性,改进养老条件,提升老年人群生活品质,众多智能化适老、助老家具开始走向市场[3]。多功能助老床,作为老年人必不可少的护理产品,受到老年人群的青睐。但是,现阶段电动、手动护理床多为陪护、观察使用,均属于有人护理的情况,不适合独居老年人操作使用[4]。
国内外对护理助老床的研究起步较晚,近年来关注度逐步提高。美国Metrocard公司研发了一种护理床,该床能完成支背和曲腿功能[5]。日本Murate Machinery公司研发了一种远程遥控护理床,该护理床由电动床体与轮椅组成,可相互转换[6]。曹元等人基于人机一体化模型,研究在位姿变换过程中人体的状态,设计了一种新型轮椅床[7]。广东工业大学张欣等人将TRIZ功能裁剪法应用于养老护理床的设计[8]。但上述对护理助老床的研究都相对简单,功能不够全面。
对于大部分老年人,正确的护理不仅可以帮助老年人缓解长期卧床的病痛、心理压力以及提高自身的免疫能力,还可以预防多种病变的产生[9]。针对上述问题,本文设计了一种新型助老电动床。
1 设计方案与原理
1.1 设计方案
本文设计的助老电动床共有3个主要机构,分别为升降机构、起背曲腿机构、翻背机构。具体结构示意图如图1所示。
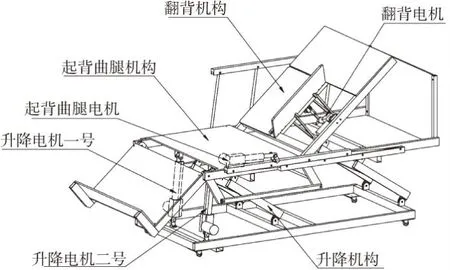
图1 助老电动床结构示意图
1.2 设计原理
图2所示为助老电动床的设计原理。
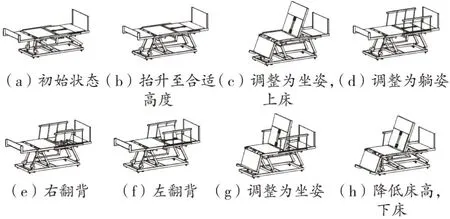
图2 助老电动床设计原理
图2中:a为电动床初始状态;b为老年人准备上床前,固定于床底支座与床身之间的一号、二号升降电机工作,床身抬升到与老年人身高相匹配的位置,同时两侧扶手处于折叠状态;c为老年人准备从床侧面坐上床时,固定在床板背面的起背曲腿电机工作,电动床调整成坐姿状态;d为当老年人准备入睡时,起背曲腿电机再次工作,推动床背框架使床调整成平躺姿势,期间老年人可顺势将扶手拉起,此时可调整床身高度,以方便护理人员护理或适应不同老年人需求;e为固定在床背框架上的翻背电机工作,推动翻背摆杆,进行右翻背;f为左侧翻背状态;g为当老年人想进行休闲娱乐等活动时,可再次将床调整为坐姿状态;h为当老年人准备下床时,一号、二号升降电机工作,降低床身高度,老年人放下折叠护栏,下床。
特别地,老年人可以根据实际需要自由调整动作流程。
2 机构运动学模型分析
本助老床分为3个主要机构,分别为升降机构、起背曲腿机构和翻背机构。其主要研究参数如表1所示,其中位移量反映运动的趋势与幅度,加速度量反映运动的平稳程度[10]。
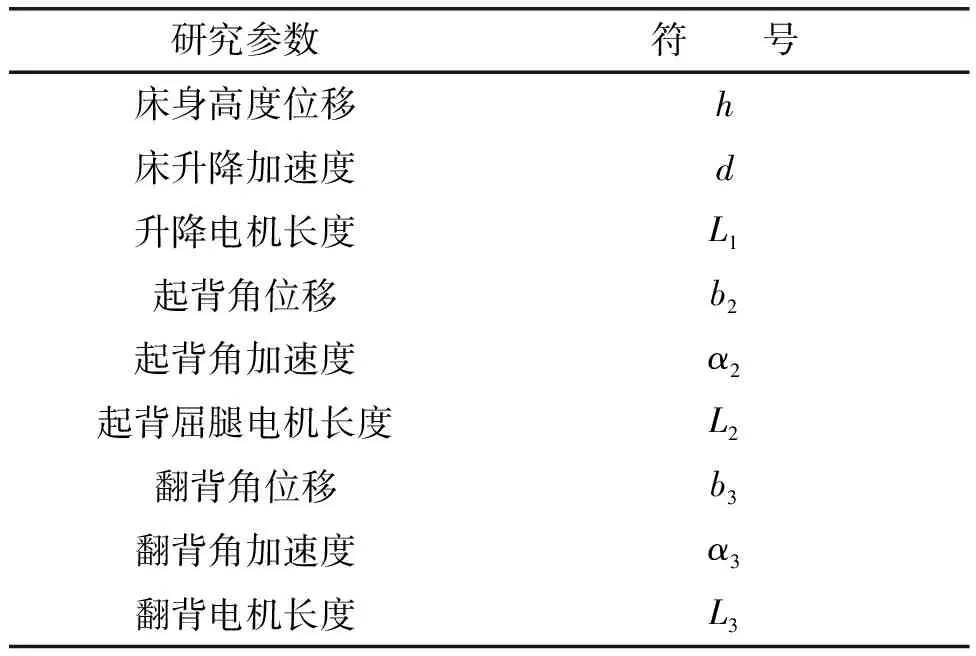
表1 研究参数表
2.1 升降机构运动学模型分析
该机构主要包括前升降床腿、后升降床腿和两个升降电机,可实现助老床升降功能。根据老年人实际需要可调整至老年人最适合上下床的高度,并根据老年人不同的睡眠习惯,进行调整[11]。对于那些需要护理的老年人,升降功能也能帮助护理人员更方便地照料。升降机构示意图如图3所示。
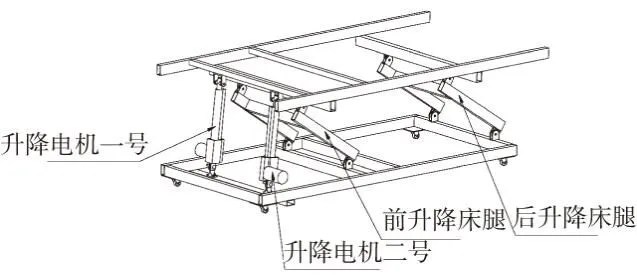
图3 升降机构
升降机构运动模型如图4所示。各构件长度及点之间距离均以该构件或两点的字母表示(如BE表示BE杆的长度,BC表示B、C两点之间的距离)。特别地,EFx与EFy分别表示EF杆在x与y方向的投影长度(下文中均如此,且字母仅对对应部分有效)。
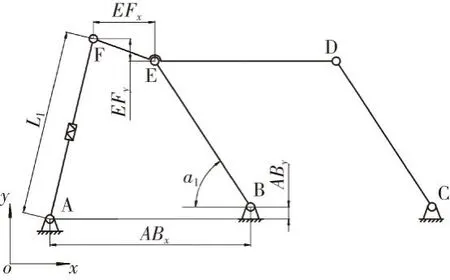
图4 升降机构运动模型
由于BE=CD,所以FED杆做平移运动,所以F点与E点在x方向的位移大小相同,即AF与EB在x方向的投影变化量的绝对值相同,由此可得:
EBx-EBcosa1
(1)
以L1表示a1,解得:
(2)
其中:
(3)
由此可得,床升降高度:
h=EBsina1+382(其余固定部分高度)
(4)
对h求二阶导数即可获得加速度d。
根据人机工程学,可以初步确定一些与人体尺寸、机构运动相关的参数[12],并在此基础上进行优化,得到优选参数。升降机构优选参数如表2所示。
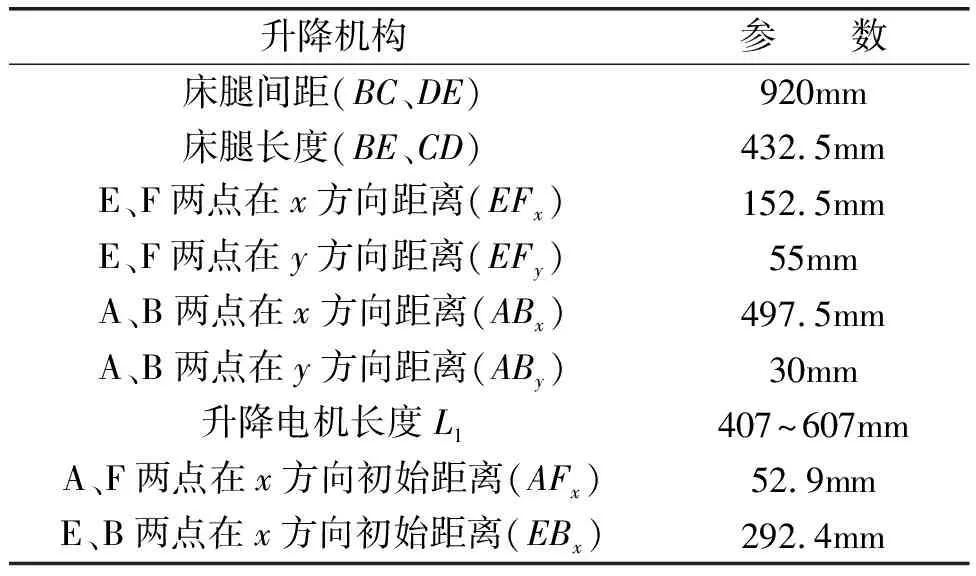
表2 升降机构优选参数
根据机构模型分析及优选参数,计算得到助老电动床升降机构位移和加速度。电动床抬升位移和加速度曲线如图5所示,下降曲线类同。
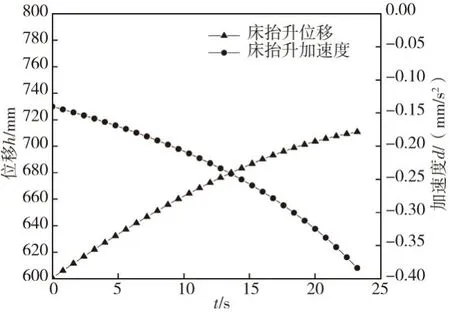
图5 升降机构运动学曲线
由图5可知,升降机构初始高度为600 mm,可在25 s内完成抬升或下降,距离为110 mm,最大加速度约为0.38 mm/s2,运行平缓,人体感觉舒适,符合针对老年人的设计要求。
2.2 起背曲腿机构运动学模型分析
许多老年人在起身或入睡下躺时,都存在着或多或少的困难。在躺下的过程中,由于没有支撑背部的物体,老年人很难控制力度,有时背部直接栽倒在床上,难免会出现一些损伤[13]。因此,设计了图6所示的起背曲腿机构,可以在老年人躺下或起身的时候,给予其足够的支撑力,帮助老年人顺利、轻松地完成起身及躺下的动作。在起背的同时,腿部连杆随之转动,帮助老年人落腿,使老年人更快捷地下床。
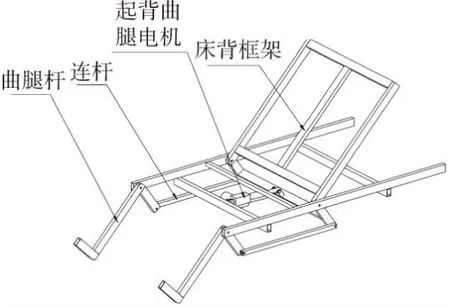
图6 起背曲腿机构
起背曲腿机构运动模型如图7所示。
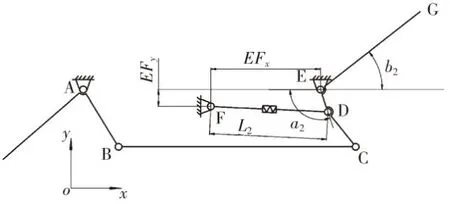
图7 起背曲腿机构运动模型
EBx-EBcosa1
(5)
以L2表示a2,解得:
(6)
其中:
(7)
由此可得,床起背落腿时的角位移为:
b2=a2-a0(ED杆与x负方向初始夹角)
(8)
对b2求两阶导数即可获得加速度α2。
起背曲腿机构优选参数如表3所示。
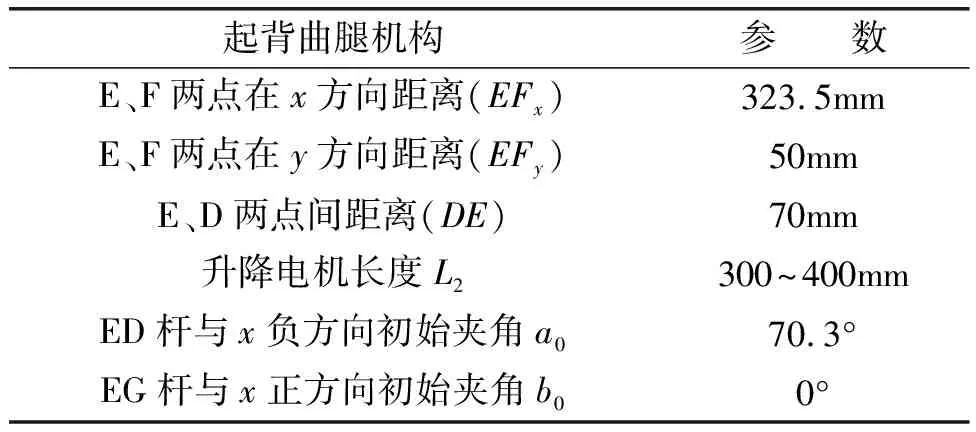
表3 起背曲腿机构优选参数
根据机构模型分析与优选参数,计算分析得到的起背曲腿机构运动曲线如图8所示。

图8 起背曲腿机构运动曲线
由图8可知,起背曲腿机构可同时实现起背和曲腿,最大角度为71°左右,老人基本处于坐姿,可方便娱乐或下床。机构运行时间为12 s,最大角加速度约为0.027°/s2,运行平稳。
2.3 翻背机构运动学模型分析
当自理能力较差的老年人睡在床上时,仅凭自身力气很难完成翻身动作,降低了老年人在床上的舒适度,长此以往老年人还容易患压疮[14]。图9所示的翻背机构使这一难题迎刃而解,而且左右两边的背板都可以实现翻转,老年人能轻松实现左翻或右翻。
图9 翻背机构
翻背机构运动模型如图10所示。
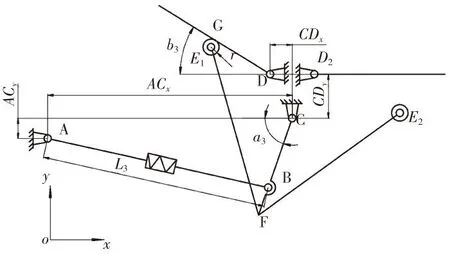
图10 翻背机构运动模型

(9)
以L3表示a3,解得:
(10)
其中:
(11)
由几何关系可知:CF与EC旋转角度相同,设EC与x负方向初始夹角为c,则:
(12)
又因为,
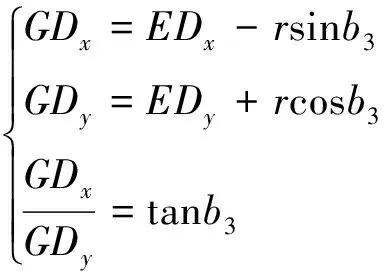
(13)
所以,
EDxsinb3-EDycosb3=r
(14)
解得:
(15)
其中:
(16)
依次代入式(12)、式(10)便可获得b3与L3的关系式,对b3求二阶导数即可获得加速度α3。
翻背机构左翻板优选参数如表4所示。
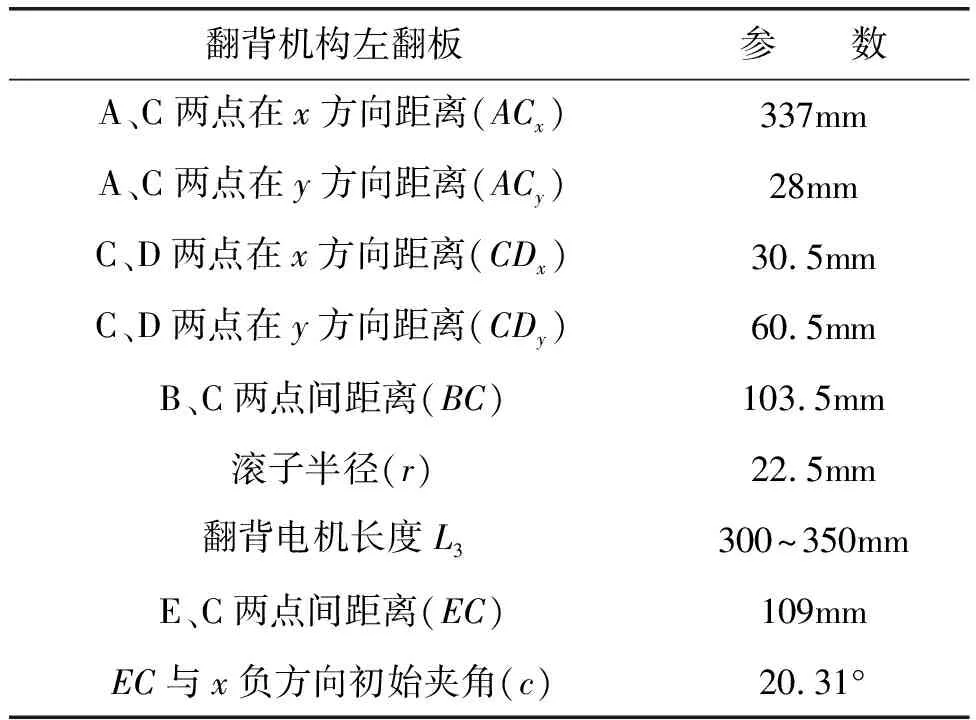
表4 翻背机构左翻板优选参数
根据翻背机构左翻板模型分析与优选参数,计算得到左翻板上翻运动曲线图(图11)。
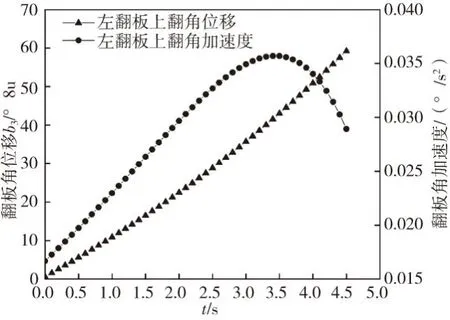
图11 翻背机构左翻板运动曲线
由图11可知,左翻板可在0°至60°的范围内运行,可达到辅助老年人翻身的作用,同时左翻板最大角加速度为0.034°/s2左右,运动平稳,设计合理。对于右翻板,其运动分析与左翻板完全一致。
3 助老电动床控制结构设计
根据助老电动床设计原理与功能需要,设计了一个控制系统。系统主要包括以下模块:主控板,遥控模块,手柄模块,显示屏,监护模块等。主控芯片采用STM32微控制器。遥控模块采用带红外功能的遥控器,可以对助老电动床进行自主控制。手柄模块作为备用控制模块安装在床身侧面,防止遥控器遗失时,无法操作。显示屏可以显示床正处于的状态,方便遥控模块或手柄模块操作。监护模块采用监测系统,系统包括摄像头和手机,监护人可以在手机上实时查看老年人画面,防止意外。助老电动床控制结构如图12所示。
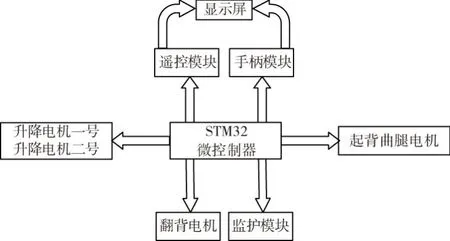
图12 助老电动床控制结构示意图
4 实验与结果
根据前述设计与运动模型分析,综合考虑强度、加工性能、经济等因素,使用壁厚为2 mm的50 mm×25mm、50 mm×30 mm以及25 mm×25 mm三种规格的Q235空心方钢管制作床的主体结构;选用优质木板制造床板,切割为五个板块,分别支撑头部、背部的左右部分、臀及大腿部以及小腿延伸至脚部分。翻背机构部分的连接轴及连杆等构件由铝合金加工而成。各部分连接通过螺纹紧固件、销连接、焊接等方法实现。参照市场上现有的医用护理床尺寸[15],制作的助老电动床如图13所示,实物尺寸为:200 cm×90 cm×(60~72)cm(长×宽×高)。

图13 助老电动床实物图
通过对实物进行测试实验,结果表明:升降机构可实现床身高度的调节,方便不同身高的老年人上下床;起背曲腿机构实现了起背功能和曲腿功能的联动,可任意调节角度,帮助老年人更自由地起身和上下床;翻背机构设计合理,仅利用一个推杆电机,实现了左右两侧翻背功能。并且,验证了实物运作过程中位移量及加速度量,发现符合机构运动学曲线,证明了运动学模型分析的正确性,表明助老电动床运动平稳,适合老年人使用。
通过简单的控制电路,实现了实物主要机构的高效运作。遥控模块、手控模块正常运作,监护人通过监护模块可以清楚地在手机上实时查看老年人画面。
助老电动床实物相关参数已由当地相关检测部门进行检测,测试报告结果表明助老电动床符合设计要求。
5 结论
从当下社会老年人实际需求着手,设计了一种翻背式助老电动床。电动床包括升降机构、起背曲腿机构和翻背机构。机构运动学模型分析与实物验证充分表明,助老床结构稳定、运动平稳、设计合理,满足老年人需要。通过控制结构实现整床的高效运作,同时监护模块可以时刻关注老年人起居状态。
