基于改进VMD-MCKD和深度残差网络的风机齿轮箱故障诊断
2024-03-04蔡昌春承敏钢张能文王全凯
蔡昌春,何 捷,承敏钢,张能文,王全凯
(1.河海大学人工智能与自动化学院,江苏 常州 213022;2.河海大学信息科学与工程学院,江苏 常州 213022;3.江苏省输配电装备技术重点实验室,江苏 常州 213022;4.江苏新道格自控科技有限公司,江苏 无锡 214433)
0 引言
作为风力发电系统传动关键部件的齿轮箱,由于其工作环境恶劣,运行工况复杂导致风机齿轮箱在实际运行过程中故障频发。实现行星齿轮箱故障诊断对于机组安全稳定运行具有重要意义。然而,在齿轮箱实际运行中故障早期的冲击非常微弱,且故障信号容易被强背景噪声掩盖,导致故障诊断结果存在偏差。因此研究如何在噪声环境下对齿轮微弱故障信号进行有效故障特征提取,对提高齿轮箱诊断准确性和可靠性具有重要意义[1-2]。
风机齿轮箱故障信号具有非线性、非平稳的特点,使得齿轮故障难以准确识别[3],因此有效提取故障特性信息是实现齿轮故障诊断的关键所在。短时傅里叶变换(short time Fourier transform,STFT)[4]、离散小波变换(discrete wavelet transform,DWT)[5]等时频分析方法是分析非线性、非平稳信号的有力工具。然而上述方法存在自身局限性,STFT 的时频分辨率固定,对于不同频率范围的信号,STFT 无法提供合适的分辨率。DWT 需要先确定小波基函数和分阶层,这就使得小波变换缺乏自适应性。因此,对于实际信号的分析,非自适应信号处理方法通常很难取得令人满意的结果。Huang 等人[6]提出一种基于数据自身特征的经验模态分解(empirical mode decomposition,EMD)信号分解方法,该方法是一种基于数据自身特征的信号分解方法,可以将非线性、非平稳的故障信号分解为若干个本征模态函数(intrinsic mode function,IMF)和残差项,但仍存在端点效应和模态混叠问题。为克服EMD 的缺陷,学者们提出集成经验模态分解(ensemble empirical mode decomposition,EEMD)[7]、局部均值分解(local mean decomposition,LMD)[8]、增强型局部均值分解(ensemble local mean decomposition,ELMD)[9]来改进EMD 算法。虽然上述算法在EMD 的基础上不断改进,但仍未能消除其缺陷。
为克服上述分析方法的不足,2014 年Konstantin Dragomiretskiy 提出变分模态分解(variational mode decomposition,VMD),VMD[10]是一种非递归的自适应信号处理方法,该算法将振动信号分解成若干个不同频率和带宽的模态分量,每个分量的中心频率和带宽由迭代搜索半分模型的最优解确定。由于VMD 算法放弃了递归分解的约束,可以有效地避免EMD 和LMD 的模态混合问题。同时考虑VMD 具有较高的计算效率和良好的噪声鲁棒性,VMD 也能有效缓解EEMD 和ELMD 的不足。文献[11]提出一种基于适应性差异变化变分模态分解(adaptive differential evolution-VMD,ADE-VMD)的故障特征提取方法,能够自适应地生成噪声小、无序混叠的重构信号。文献[12]为解决VMD 在提取故障特征频率时鲁棒性低及分解个数不确定的问题,通过引入瞬时频率估计方法确定最优分解个数,然后对模糊熵值最小的分量进行包络谱分析。文献[13]为了能够准确识别频带的差异,通过VMD 将信号分解为中心频带独立的窄带分量,利用功率谱熵(power spectral entropy,PSE)量化分量中边带振幅的大小和分布,最后通过深度神经网络(deep neural networks,DNN)挖掘特征向量的深度特征,对故障信号进行分类。
但考虑齿轮故障早期产生的冲击微弱,受背景噪声干扰严重,若仅通过单一的VMD 算法进行故障特征提取,效果往往不理想。本文尝试将其与其他方法结合,以获得更好的齿轮故障特征提取性能,从而提高齿轮故障的诊断精度。最小熵解卷积(minimum entropy deconvolution,MED)利用振动信号的冲击成分提取故障特征,由于MED 算法只针对振动信号中少数尖端脉冲,造成其他冲击脉冲丢失,导致故障特征提取不充分[14]。2012 年,Mcdonald 针对故障特征丢失问题,提出了基于信号解卷积的最大相关峭度解卷积算法(maximum correlated kurtosis decnvolution,MCKD),有效突出故障特征连续冲击脉冲信号[15]。MCKD 算法可以有效地提取出被噪声淹没的周期性脉冲信号,增强原始信号的相关峭度值,从而提高信号故障特征的可识别性。另外MCKD 算法通过在每一步迭代后更新迭代周期,使得迭代周期接近真正的故障周期,从而提高滤波器的收敛速度和精度。文献[16]提出一种基于最小熵反褶积的时域分析方法,并将其应用于扭振分析中,利用扭振信号的故障敏感性特征和反转滤波提高故障诊断的准确性。文献[17]通过量子遗传算法自适应选择MCKD 参数,提取复合故障信号中与单个故障部件相关的故障特征,并进行功率谱和包络谱分析。
人工智能技术的发展为深度学习算法在旋转机械故障诊断领域的应用提供了基础。文献[18]采用基于优化变分模态分解和卷积神经网络的故障诊断方法,构建小样本情况下的齿轮箱故障诊断模型,实现小样本情况下的齿轮箱故障诊断。文献[19]采用基于卷积神经网络(convolutional neural networks,CNN)的宽卷积核神经网络,通过拓宽卷积核来提高感受野,并结合双向门控循环单元(bidirectional gate recurrent unit,BiGRU)提升模型的识别精度。由于齿轮箱早期故障信号微弱,故障特征不明显,其故障特征难以通过浅层特征表达,残差神经网络(deep residual network,ResNet)是卷积神经网络深层结构拓展模型,该网络具有很强的特征学习和特征表达能力,解决了传统深层网络存在的性能退化问题[20]。文献[21]分别将信号进行多源集合经验模态分解(multivariate ensemble empirical mode decomposition,MEEMD)和VMD 分解,通过相关系数、方差贡献率等指标提取有效分量并进行信号特征融合,然后通过深度残差网络进行故障识别,有效解决了齿轮箱振动信号相互耦合和故障诊断识别率低等问题。文献[22]在ResNet 故障诊断模型中设计了频段注意机制,采用小波包变换和信道注意机制突出振动信号的微弱特征,提高深度网络性能。
为充分利用VMD 和MCKD 算法在信号降噪以及特征提取方面的优势,提出基于VMD-MCKD 算法提取特征分量进行信号重构,为进一步加强VMD和MCKD 的性能,采用麻雀搜索算法(sparrow search algorithm,SSA)算法优化VMD、MCKD 参数。同时,考虑到若没有丰富的专业知识,仍不能通过重构信号直接识别出故障,因此,利用深度残差网络对重构信号进行分析,充分利用残差网络模型对特征信息进一步挖掘,实现风机齿轮箱故障特征的精准提取和故障识别分类。并通过实验台数据测试验证本文方法的有效性和准确性。
1 基于VMD-MCKD故障特征提取
1.1 变分模态分解
VMD 算法通过自适应信号频域分段策略,将信号频域分离为多个分量,从而得到一系列不同频率和幅值的模态分量[23-24]。VMD 算法的本质是将信号分解问题变为一个带约束的变分最优化问题。
VMD 算法的约束条件为信号分解前后相等,模型结构如式(1)所示。
式中:x为原始输入信号;K为固有模态分解个数;∂t(·)为函数对t求偏导;δ(t)为脉冲函数;*为卷积符号;{ωk}={ω1,…,ωK}为模态函数的中心频率;{uk}={u1,…,uK}为分解后的模态分量。
为求解上述约束变分问题的最优解,引入拉格朗日乘子λ(t)以及惩罚因子α将问题转化为非约束性变分问题。扩展的拉格朗日表达如式(2)所示。
运用乘子交替方向算法求解式(2)的最优解,即将原问题分解成交替寻找uk和ωk的子问题,如式(3)和式(4)所示。具体实现算法如下:
2)从k=1 开始迭代,直到k=K,更新各模态信号uk和中心频率ωk如式(3)和式(4)所示,其中r∈[1,K]。
3)根据式(5)更新λ,其中Γ为更新因子。
4)若满足式(6)收敛条件则停止迭代,否则重复步骤1)和2)。
式中:ε为一个大于0 的整数,代表精度。
1.2 最大相关峭度解卷积
采集的齿轮振动信号可以表示为时序表达式,如式(7)所示。
式中:y(t)为齿轮箱实际采集到的信号;x(t)为齿轮产生的周期性信号;h(t)为路径传输的衰减效应;e(t)为采集信号时的背景噪声。
MCKD 实质上是通过寻找最优滤波器使得原始信号的相关峭度达到最大,将齿轮箱实际采集的信号y(t)尽可能恢复为周期性信号x(t),从而抑制背景噪声、突出故障冲击成分[25]。该算法利用相关峭度作为优化目标来设计滤波器,相关峭度为
式中:T=fsi为冲击信号周期,fs为采样频率,fi为故障特征频率;M指位移数,一般取M=7。
通过使相关峭度最大来设计最优滤波器f(n),令
式中:f=(f1,f2,…,fL)T,L为滤波器阶数。
求解式(9),等价于
最终滤波器系数为
MCKD 算法具体流程如下:
1)初始化滤波器阶数L、解卷积周期T及位移数M等参数;
2)计算实际采集到的信号的X0、XT0、XmT;
3)计算经过滤波器输出的信号x。
4)根据x计算β和αm;
5)更新滤波器f的系数;
6)若滤波前、后信号的相关峭度值小于阈值,结束迭代,否则重复步骤3)—步骤5)。
1.3 SSA优化VMD-MCKD参数
α和K取值不同,VMD 的分解结果也会不同,因此,VMD 分解振动信号的前提是设定惩罚因子α和模态分解个数K。若惩罚因子α取值越小,分解后各IMF 的带宽就越小;α取值越大,分解后各IMF 的带宽就越大。另外,若模态分解个数K取值过小,会导致结果产生模态混叠现象;取值过大,会导致结果产生虚假分量。因此,在用VMD 分解振动信号时,需要选择合适的α和K。
MCKD 算法中有两个重要参数,分别是滤波器阶数L和周期T,它们需要根据不同的振动信号特性来确定。考虑实际工况中的背景噪声复杂且多变,实际的周期与理论值存在一定的误差,而且滤波器阶数L和周期T的选择相互影响。
为提高VMD 和MCKD 算法的效果[26-27],通过优化VMD 和MCKD 算法的参数。SSA[28]是SHEN 等人于2020 年提出,具有寻优能力强,收敛速度快等优点,在路径规划、故障诊断等领域广泛应用。
麻雀种群觅食时,可以划分为发现者和追随者两种角色。发现者负责搜索食物丰富的区域,是种群中适应度较好的个体,同时为追随者提供区域的信息,发现者位置更新如式(12)所示。
式中:b为现阶段的迭代次数;α∈(0,1);表示第i个麻雀在第j维的位置;bmax为最大迭代次数;L为1×d阶矩阵;Q为服从标准正态分布的随机数;R2为预警值,取值为[0,1];ST为安全值,取值为[0,1]。
当R2≥ST时,追随者按照发现者的路径到达安全区域。追随者位置更新为
另外,种群会分配10%~20%的警戒者,当遇到危险时,警戒者会发出信号,种群会迅速转移到安全地点,位置更新公式为
式中:β为服从标准正态分布的随机数,用于控制个体移动的步长;R为一个随机数,为移动的方向;ε为控制步长参数的极小常数,避免分母为零;fi为第i只个体的适应度值;fg为最优适应度值;fw为最差适应度值。
SSA 优化VMD、MCKD 参数的算法流程如图1所示。以SSA 算法优化VMD 为例,其具体流程为:
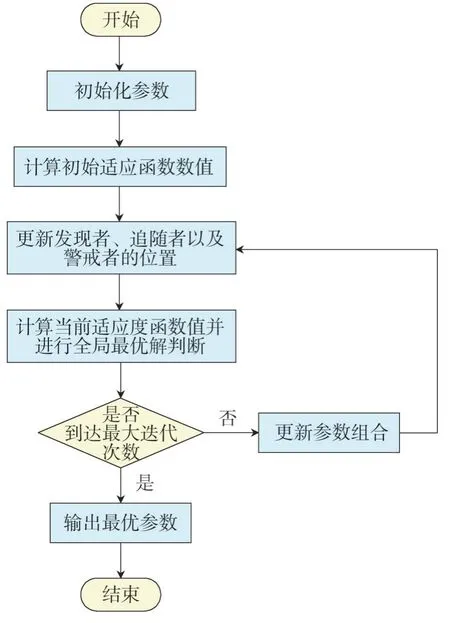
图1 SSA优化流程Fig.1 SSA optimization flowchart
1)确定种群规模、最大迭代次数、麻雀种类比例,并随机初始化每个麻雀的位置[α0,K0],并求初始适应度函数值,本文采用最小包络熵值作为适应度函数;
2)根据麻雀所在位置,对原始信号进行VMD 分解,并求出麻雀的适应度函数值;
3)根据适应度函数的大小,确定最优个体;
4)根据随机因子是否超出预警值更新麻雀所在位置;
5)判断是否达到迭代结束条件;若达到,输出最优α和K,未达到则返回步骤2)继续执行。
2 基于ResNet的齿轮故障诊断
2.1 深度残差网络
为提高神经网络的非线性表达能力和信号特征提取能力,通常需要增加网络的层数。但是,过深的网络结构会导致梯度消失或梯度爆炸的问题,影响故障诊断的准确率。残差网络是由多个含有跳跃连接线的残差块组成的,可以在前向传播时让浅层的特征在深层复用,在反向传播时让深层的梯度直接传到浅层。这样,当网络输入与输出之间有较大的重构误差时,残差块可以通过跳跃连接线把误差信息反馈给浅层网络[29],从而降低重构误差,有效缓解深层网络退化,加快训练速度。
残差模块由两部分组成,分别是恒等映射和残差映射。残差模块结构如图2 所示,其中x为输入,F(x)为残差函数。
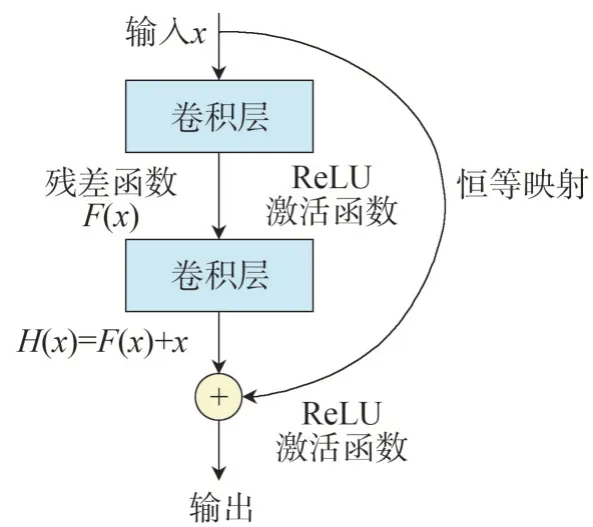
图2 残差模块Fig.2 Residual module
当残差块的输入为Xin时,可得计算后的输出为
式中:F(·)为残差映射;Win为相应的权重参数;f(·)为激活函数。不同残差块之间可能存在维度不匹配的情况,需要对恒等映射Xin进行线性变换为
式中:Ws为权重参数。
如图3 所示,ResNet 的基本结构是由卷积层、池化层、残差单元模块、全连接层和分类层构成的,残差单元模块有两种类型,一种是恒等残差模块,用于输入和输出尺寸相同的情况,另一种是卷积残差模块,用于输入和输出尺寸不同的情况,通过卷积操作来调整尺寸。
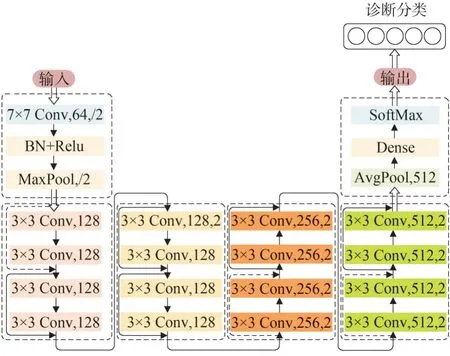
图3 网络结构图Fig.3 Structure topology of network
该ResNet 模型共有17 个卷积层,首先经过一个由64 个7×7 的卷积核组成的卷积层对输入信号进行特征提取,并通过批归一化层使得神经网络的输入分布保持一致,再经过一层最大池化层。然后经过4 层的残差模块,每组残差模块包含4 个卷积层,最后通过平均池化层进行池化运算和维度为5 的Softmax 分类器进行故障诊断。
2.2 齿轮故障诊断流程
齿轮故障诊断的关键在于从振动信号中有效提取齿轮故障特征,针对齿轮故障早期产生的冲击微弱,故障信号不明显且极易受到背景噪声的影响,单独使用ResNet 网络进行齿轮故障诊断会出现输入信息特征不明显,诊断过程中故障特征丢失等问题。考虑VMD 算法可以有效去除背景噪声以及MCKD算法可以突出被噪声掩盖的故障冲击信号的优点,本文通过VMD、MCKD 算法提取振动信号的故障特征,从而避免在进行故障诊断时丢失敏感特征,同时为加强VMD 和MCKD 对信号的特征提取效果,采用SSA 算法对上述算法的参数进行优化。最后将经过VMD-MCKD 算法故障特征提取后的信号作为ResNet 网络的输入进行故障诊断。
提出的基于SSA 优化VMD-MCKD 算法结合ResNet 网络的齿轮故障诊断方法框架如图4 所示。
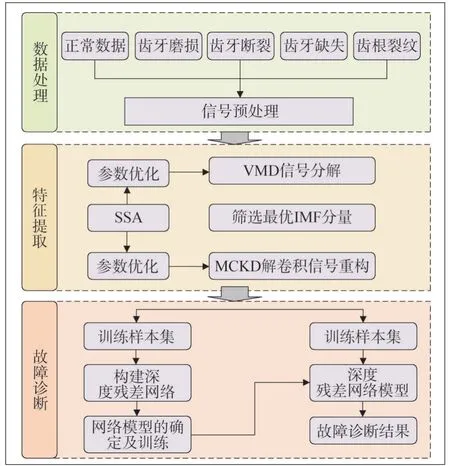
图4 齿轮故障诊断流程Fig.4 Flowchart of gear fault diagnosis
故障诊断方法具体步骤如下:
1)基于加速度振动传感器采集齿轮箱的振动信号并进行数据预处理。
2)设定SSA 参数,利用SSA 对VMD 的参数进行寻优,求得最优的模态分解个数K和惩罚因子α。
3)利用寻优得到的参数对振动信号进行VMD分解。通过计算各模态分量的排列熵,选择排列熵指标最优的分量为最优分量。然后对最优分量进行包络解调分析,确定最优分量包络谱突出频率范围。
4)对最优分量进行MCKD 参数寻优,通过步骤3)的突出频率范围确定MCKD 中参数T的寻优范围,得到最优的滤波长度参数L以及反褶积周期T。
5)设置MCKD 参数,对步骤4)所得最优分量进行MCKD 分析,提取振动信号故障特征,再对信号进行解卷积后,分析其包络变化。
6)构建ResNet 网络模型,输入训练样本训练ResNet 网络,得到齿轮故障诊断模型。
7)使用齿轮故障诊断模型对经过VMD-MCKD算法处理后的故障特征进行故障诊断,验证该方法的有效性。
3 实例分析
3.1 实验说明
为了验证所提方法的有效性,在图5 所示的风电机组行星齿轮箱故障实验平台下,采集齿轮箱的实时振动信号。本次实验采集的是振动加速度信号,根据齿轮发生故障的部位不同,本次实验设置了5 种齿轮工作状态,即正常工况、齿牙磨损、齿牙缺失、齿牙断裂以及齿根裂纹,通过这5 种工况数据进行实验验证,采样频率设置为12 800 Hz。图6 为故障齿轮实物。
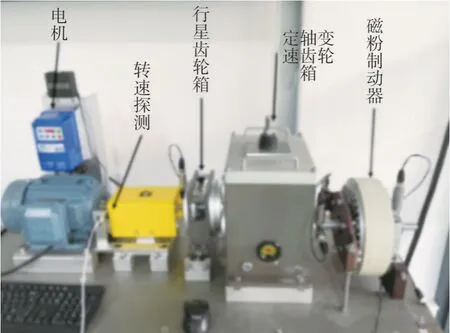
图5 风电机组故障实验平台Fig.5 Failure test platform for wind turbine
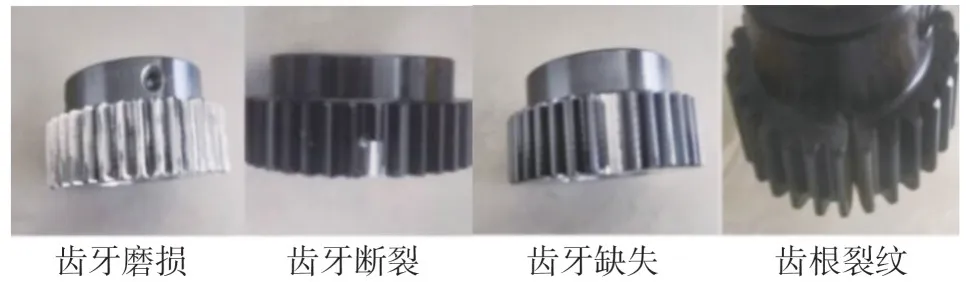
图6 故障齿轮Fig.6 Malfunctioning gear
3.2 故障特征提取
以齿根裂纹为分析对象,麻雀搜索算法参数分别为:种群数量p=80,发现者数量占比为0.7,警戒者占比为0.2,最大迭代次数为30 次。对VMD 算法中的参数α和K进行SSA 寻优,参数α和K的搜索范围lb=[3,1 000],ub=[10,2 000]。经过优化计算,目标函数值在进化到第9 次时收敛,其目标函数的最优解为0.498 7,此时对应的最佳参数组合为α=9,K=1515。
将得到的优化参数指导VMD 算法分解振动信号,得出分解后各分量的时域和频域变化如图7 和图8 所示。从图8 各分量的幅频特性曲线可以看出,各IMF 分量的中心频率彼此相互分离,分别为381.3 Hz、1 094 Hz、1 375 Hz、2 175 Hz、2 475 Hz、3 231 Hz、3 663 Hz、4 344 Hz、5 600 Hz,有效抑制了模态混叠现象。根据排列熵指标筛选IMF 分量,排列熵是一种检测动力学突变和时间序列随机性的方法,该方法具有较强的抗噪声能力,在应用排列熵进行分析时只需较短的时间序列便可以得到稳定的系统特征量,对序列长度要求不高。图9 给出了各个IMF 分量的排列熵值,其中IMF8 的排列熵值最大,说明IMF8 的故障特征最明显,因此,采用IMF8 分量表征该信号的故障特征。
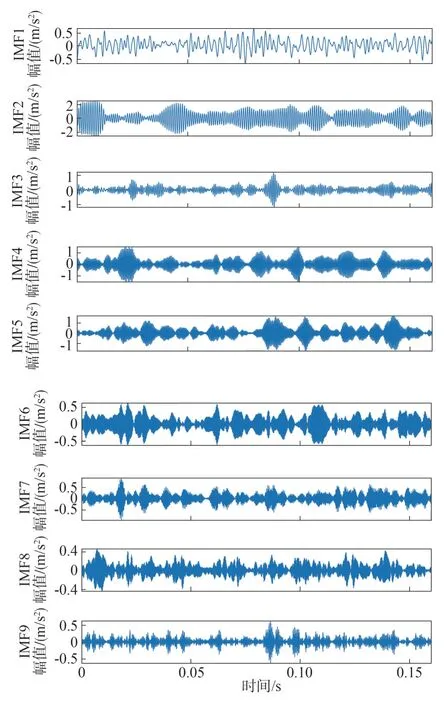
图7 VMD分解时域图Fig.7 Time domain diagram of VMD decomposition

图8 VMD分解频域图Fig.8 Frequency domain diagram of VMD decomposition
当故障特征频率未知时,可以通过包络谱的突出频带确定反褶积周期T的范围。图10 给出了IMF8 包络谱分析结果,由图10 包络谱可知,其中50 Hz 谱线幅值最大,因此可以认为故障特征频率在50 Hz 附近。频率带选择过大会增加算法寻优时间,过小则可能丢失故障特征频率,结合采样频率和故障特征频率确定参数T的范围为[249,262]。参数L会影响滤波频率分辨率,设置为[100,1 000]可满足实际信号要求,因此,设置参数L和T的搜索范围lb=[100,249],ub=[1 000,262]。
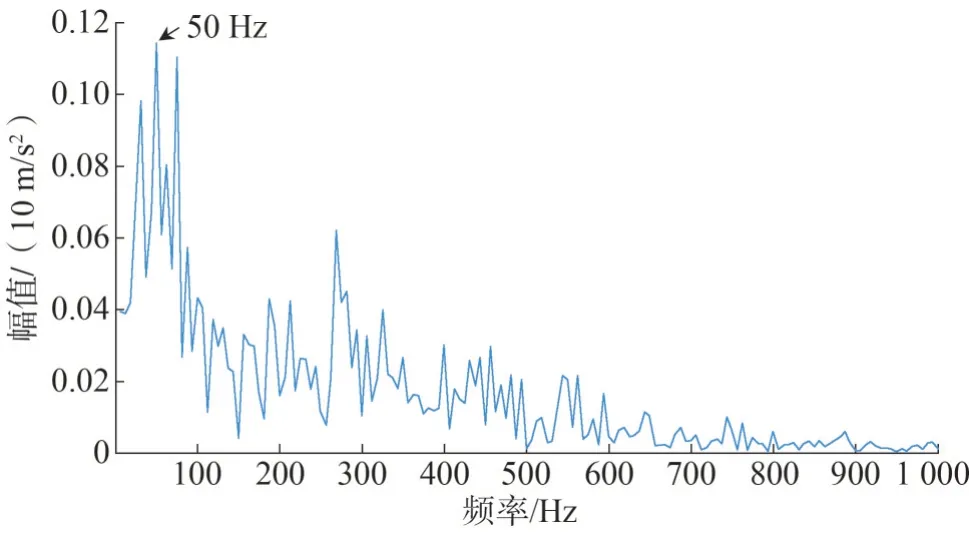
图10 最优分量包络谱Fig.10 The envelope spectrum of the best component
利用SSA 算法对MCKD 中参数L和T进行优化,图11 给出MCKD 算法的适应度函数随种群进化迭代数变化曲线,由图11 可知,其最优解为12.88,得到最优参数组合为(984,251)。因此,在MCKD 重构计算中滤波器长度参数设定为L=984,反褶积周期T=251。
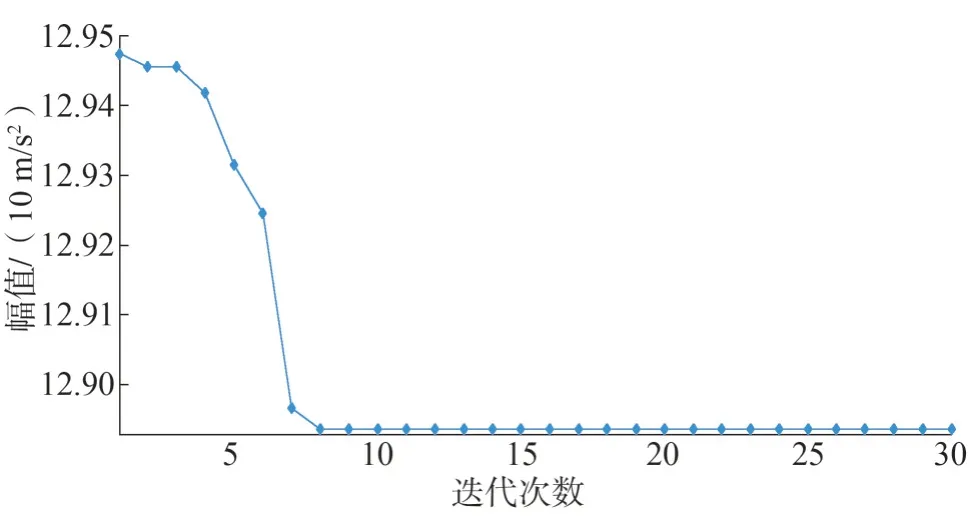
图11 适应度优化曲线Fig.11 Fitness optimum curve
图12 给出了MCKD 重构计算后振动信号的时域波形,从该时域波形中可以清晰地看出信号的冲击成分。图13 为经过MCKD 重构后振动信号的包络谱,通过对比图10 和图13 可以发现,图10 中信号包络谱虽然可以找出故障特征频率,但其周围存在较多干扰谱线,且其倍频不够突出,故障特征提取不够充分,而从图13 可知MCKD 重构后的信号包络谱中故障特征频率fi及其倍频的谱线均清晰可见,故障特征频率被充分提取,表明本文方法能够有效提取信号故障特征。
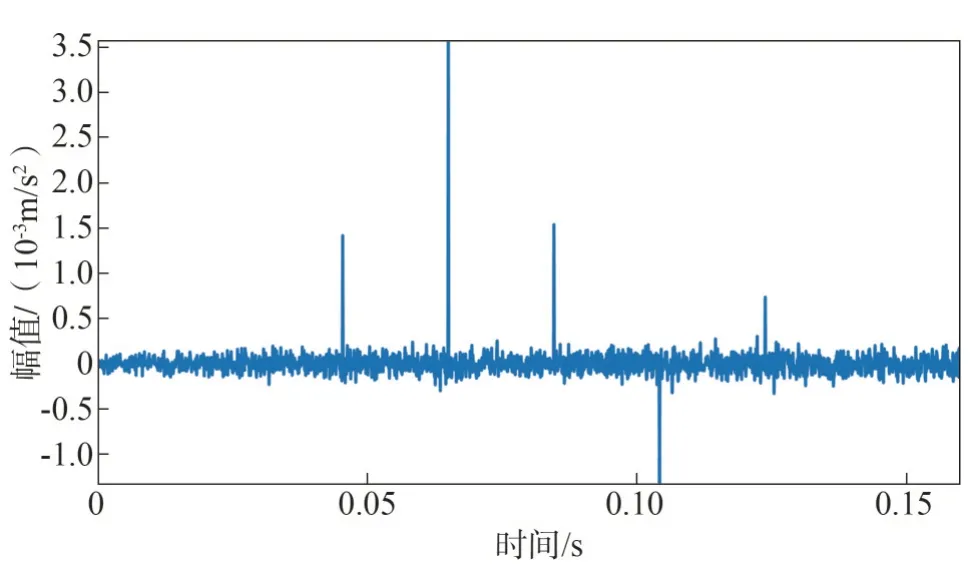
图12 MCKD处理后的时域图Fig.12 Time domain diagram after MCKD processing
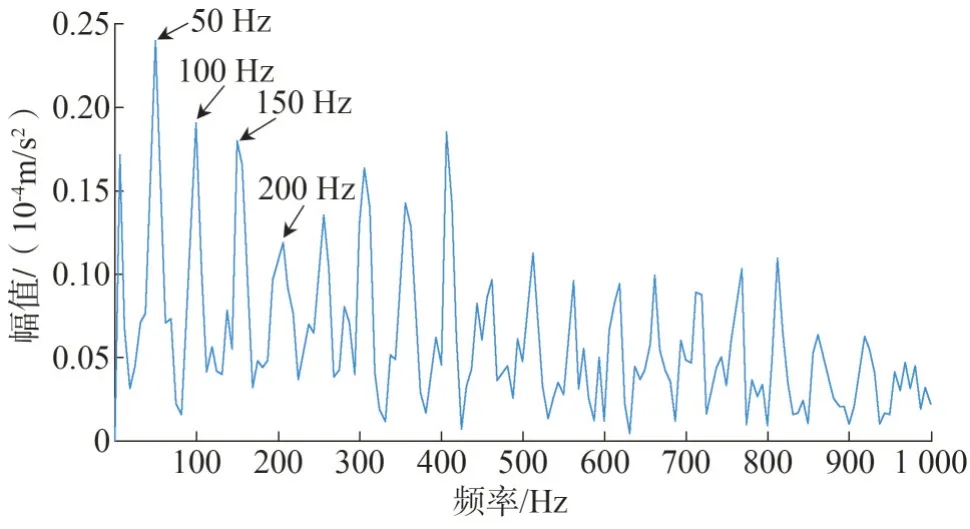
图13 MCKD处理后的包络谱Fig.13 Envelope spectrum after MCKD processing
3.3 齿轮故障诊断
考虑振动信号样本过少可能会导致模型过拟合,通过重叠采样分割齿轮振动信号,由此增加故障样本数量,提高模型的拟合度。针对每类工况,分别采集1 950 组振动信号样本,每组样本包含2 048 个数据点,数据组成如表1 所示,其中训练集和测试集的比率为0.9 和0.1。设置ResNet 故障诊断模型学习率为0.000 1,损失函数采用交叉熵损失函数,隐藏层激活函数采用ReLU 激活函数,优化器和分类器分别采用Adam 和Softmax,批大小为128,迭代次数为100 次。
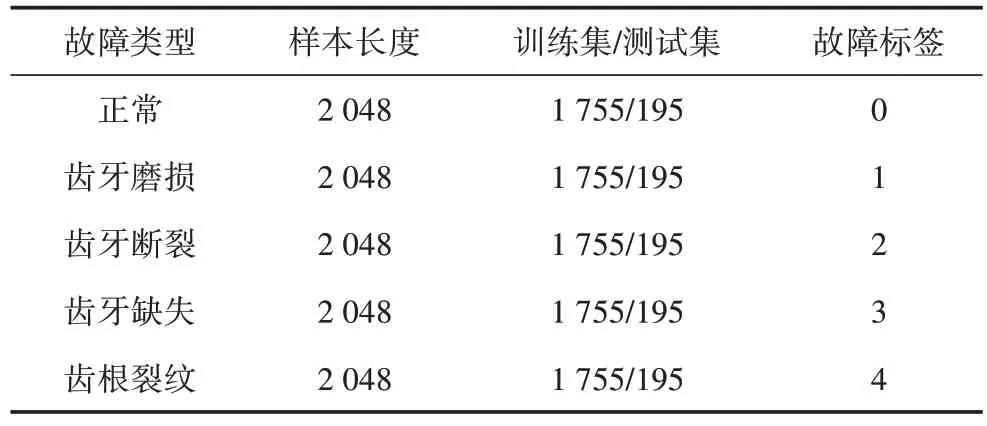
表1 齿轮故障数据组成Table 1 Gear fault data parameters
将振动信号的故障特征通过ResNet 网络训练并进行故障识别,网络的训练和测试过程如图14 所示,其训练损失值和预测损失值的迭代如图15 所示。由图14 可知,训练样本和测试样本的准确率随迭代次数的增加而增加,当迭代到35 次后,训练集准确率曲线基本稳定,达到100%,表明该训练模型具有很好的识别性能,可以有效地提取振动信号的特征关联。测试集准确率曲线也随着迭代次数的增加而快速上升,最终维持在97.48%左右。从图15可以看出本方法具有收敛快、稳定性强等特点,并且可以有效抑制模型过拟合。随着迭代次数的增加,训练和测试样本的损失值不断减小,最终趋近于0,在迭代到35 次左右模型会达到高度收敛。

图14 准确率与迭代次数的关系曲线Fig.14 The relation curve between accuracy and number of iterations
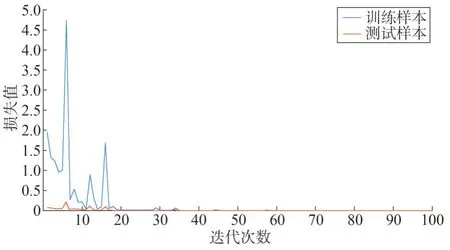
图15 损失值与迭代次数的关系曲线Fig.15 The relation curve between the loss value and the number of iterations
3.4 对比分析
为进一步验证本方法对风机齿轮箱故障诊断的分类效果,选取未经过处理的数据样本以及只经过VMD 分解后的数据样本输入模型中进行对比实验。宽卷积神经网络(wide convolutional neural networks,WDCNN)网络模型由输入层、5 个卷积层、全连接层和输出层组成,其结构特点是第一层为大卷积核,大小为64×1,其余卷积层全部为3×1 的小卷积核,结果对比如表2 所示。由对比可知,本方法结合了VMD-MCKD 和ResNet 的优点,同时利用SSA 优化VMD-MCKD 参数实现振动信号的分解和重构准确提取故障特性,并将其用来训练故障诊断模型,故障识别准确率达到97.48%,与WDCNN 模型相比提升了42.72%。从表2 还可以看出,VMD-MCKD 对于故障诊断准确率的提高作用明显,针对ResNet 网络和WDCNN 网络经过VMD-MCKD 分解和重构,模型的准确率各自提高了7.56%和15.79%。同时与只经过VMD 分解后的数据以及只经过MCKD 处理后的数据进行对比,在ResNet 模型下准确率分别提高了3.09%、4.52%。
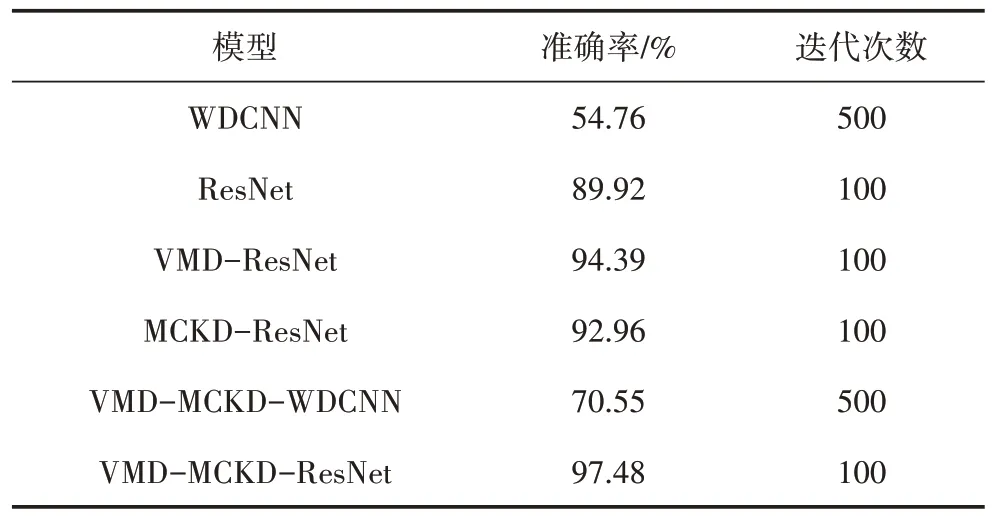
表2 不同模型的准确率对比Table 2 Comparison of accuracy in different models
图16 和图17 分别给出了VMD-MCKD 故障特征提取对WDCNN 模型和ResNet 模型故障诊断的影响分析。从图16 可以看出,由于齿轮早期故障信号微弱难以通过浅层特征表达,因此模型在进行齿轮故障诊断时不稳定且准确率较低,经过VMD-MCKD 特征提取提高了网络的稳定性,故障诊断准确率提升了15.79%。图17 可知,通过多个残差模块相互堆叠进行残差和卷积运算,不断加深模型深度,缓解传统卷积网络的梯度消失或梯度爆炸问题,提高了故障诊断精度;同时,通过改进VMD-MCKD 算法对原始振动信号进行分解和重构,削弱背景噪声,加强信号中的故障冲击成分,提高故障诊断的稳定性和诊断精度。
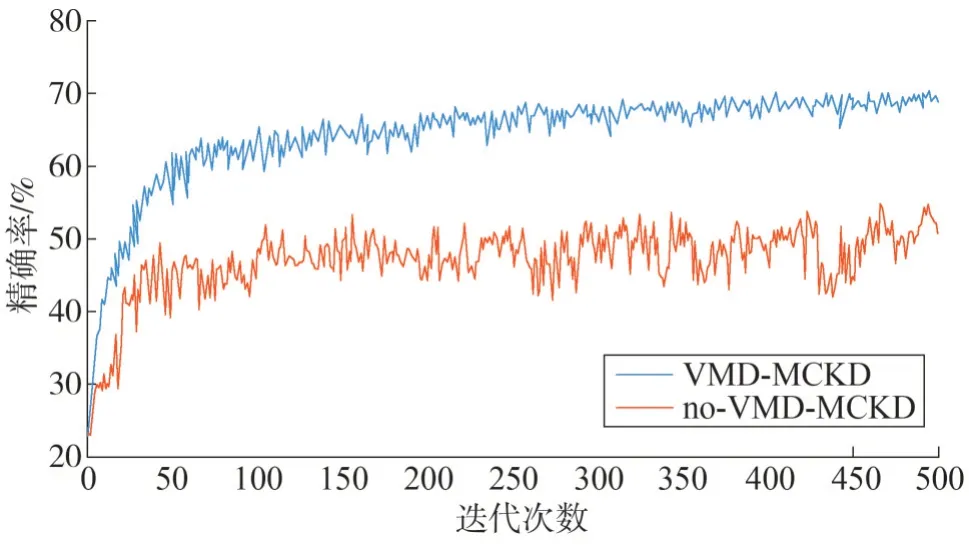
图16 WDCNN模型对比Fig.16 Comparison of WDCNN model
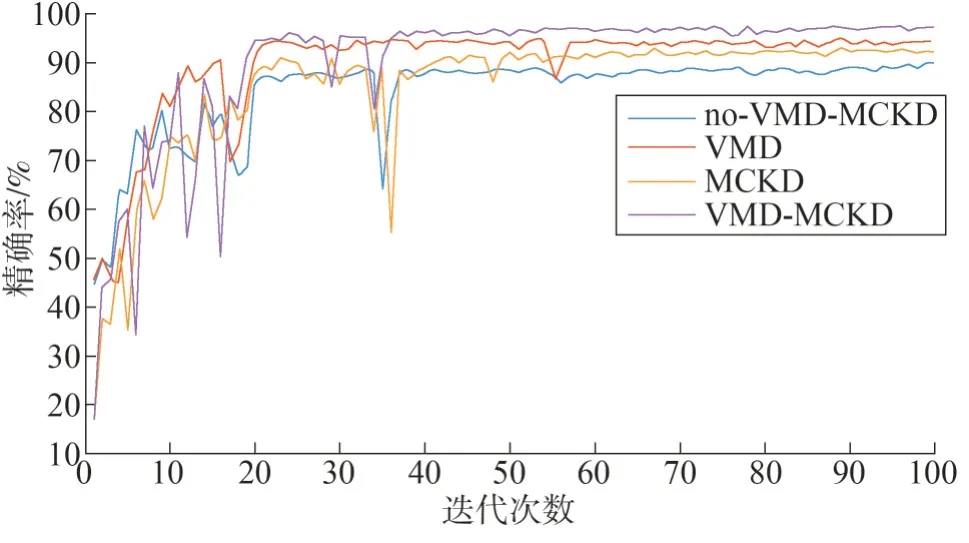
图17 ResNet模型对比Fig.17 Comparison of ResNet model
4 结论
在实际运行中风电机组齿轮箱故障早期产生的冲击微弱,且极易被强背景噪声掩盖,导致传统方法在对故障产生的微弱信号进行故障特征提取时出现提取效果不明显及诊断精度低。为此,提出一种基于改进VMD-MCKD 算法和深度残差网络的风机齿轮箱故障诊断方法,主要得出了以下结论:
1)采用基于VMD-MCKD 算法的振动信号分解和重构方法,利用VMD 算法抑制振动信号中的噪声成分,避免模态混叠现象,利用MCKD 算法增强振动信号的冲击成分,提高信噪比,从而能够有效提取微弱信号的故障特征。
2)采用SSA 算法对VMD 以及MCKD 参数进行优化,针对VMD 中的惩罚因子α、模态分解个数K和MCKD 算法中的滤波器阶数L和反褶积周期T等参数进行寻优计算,提高算法模型参数的合理性。
3)采用基于改进VMD-MCKD 和ResNet 的齿轮箱故障诊断模型,与传统的网络相比能够充分获取微弱信号中的故障特征,避免出现特征丢失等问题,提高齿轮故障诊断准确度。
