面向虚拟连挂的城轨列车群组追踪运行仿真研究
2024-03-03张英贵赵明慧张云丽
张英贵,赵明慧,张云丽
(中南大学,交通运输工程学院,长沙 410075)
0 引言
城市轨道交通能有效缓解城市道路交通拥堵问题,在国家法定节假日和重大活动等高峰期旅客出行需求极端旺盛,突发大客流易导致站内拥堵,出行压力激增。我国城市轨道交通网络化运营进程不断加快,不同站点客流受时空影响较大,已逐步开始采用成网带支线的多列车跨线运营模式缓解出行压力[1]。虚拟连挂列车群组运行过程中能自主动态灵活解编,在缓解运能紧张,适应客流时空分布不均等方面呈现突出优势[2],能有效满足复杂多变的城轨运营需求。面向虚拟连挂的城轨列车群组间以移动闭塞制式运行、群组内列车以“虚拟车钩”的形式实现“软连挂”,亟需掌握面向虚拟连挂的城轨列车群组追踪运行性能,以期为虚拟连挂技术在城轨的推广应用及其列车群组追踪运行提供有利的决策支撑。
在国外,虚拟连挂的概念由Bock 和Varchmin于1999 年率先提出,认为虚拟连挂可采用车车通信实现列车运行控制[3];BRAUN等[4]阐述了列车虚拟连挂通讯及运行定位方式;STANDER[5]探讨了列车区间安全运行动态编组与解编问题;MEO等[6]面向欧洲铁路运输管理系统/欧洲列车控制系统(ERTM/ETCS)标准规范,提出一种基于车车通信的时变延迟列车编组控制方法;JESUS等[7]设计了一种面向虚拟编组的列车运行控制系统设计方法;AOUN等[8]认为虚拟连挂能极大提升运输效率,应用前景广泛。在国内,朱松年等[9]提出列车速度联合控制领域的类似概念;NING[10]通过构建移动闭塞“撞软墙”安全制动模型突破传统列车安全防护理念;刘海东等[11]采用仿真手段分析基于移动闭塞等不同闭塞制式下城轨列车的追踪运行过程;荀径等[12]探讨虚拟重联条件下地铁列车追踪运行性能,并未考虑编组类型及站间距因素;纪玉清等[13]分析列车虚拟编组应用需求及解编过程;杨安安等[14]提出一种面向虚拟编组的大小交路列车开行方案优化方法;张蕾等[15]基于道路交通车队避撞算法思想,设计一种面向虚拟编组的多列车协同制动控制算法;罗啸林等[16]提出一种基于分布式鲁棒模型预测控制的虚拟编组列车追踪控制方法。此外,曹源等[17]明确指出虚拟连挂列车能进一步提高线路通过能力;ZHOU等[18]认为虚拟连挂可有效减少乘客出行时间及企业运营成本。既有研究多通过采用调整优化列车运行图满足运力需求,研究对象通常为固定编组列车,研究前提多为移动闭塞制式,较少融入列车虚拟连挂和动态灵活编组的要素;虚拟连挂层面的研究大多集中在列车运行控制和通信层面,且目前国内尚无具体的工程实践应用场景,专门面向虚拟连挂的城轨列车群组追踪运行仿真研究亟待加强。因此,本文基于城轨运营组织的视角,通过分析面向虚拟连挂的城轨列车群组追踪运行过程,明确其最小安全追踪距离,并设计速度和位移更新规则,提出一种基于元胞自动机的城轨列车群组追踪运行仿真模型,从城轨区间闭塞制式、动态灵活编组类型及平均站间距等方面全面刻画面向虚拟连挂的城轨列车群组追踪运行性能。
1 面向虚拟连挂的城轨列车群组追踪运行过程分析
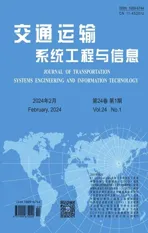
面向虚拟连挂的城轨列车群组之间采用移动闭塞、群组内列车之间采用相对移动闭塞实现列车运行控制,群组内以无线通信代替传统的机械连挂,通过车车通信实时获取相邻列车运行参数,实现群组灵活解编[17],城轨列车群组追踪运行过程如图1所示,图中,横坐标轴L表示列车的位置条件,纵坐标轴V表示列车的运行速度。移动闭塞制式下,后车移动授权计算使用前车的当前位置条件,移动授权终点为前车尾端;相对移动闭塞制式下,后车的移动授权计算要使用前车当前位置、速度及其制动距离,移动授权终点可在前车尾端的基础上再向前延伸一个前车紧急制动距离。
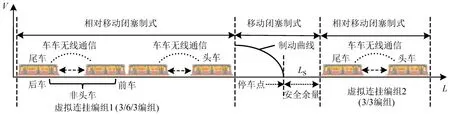
图1 面向虚拟连挂的城轨列车群组追踪运行过程Fig.1 Schematic diagram of tracking operation process of urban mass rail train group for virtual coupling
如图1所示,面向虚拟连挂的城轨列车群组追踪运行过程中,相邻城轨列车群组之间和群组内部相邻列车之间的最小追踪距离必须满足列车运行安全的需求。不同城轨列车制动工况的列车最小安全追踪距离亦不相同,基于最有利制动工况,即列车接受到制动信号后直接进入紧急制动状态,保持最大制动减速度直至停车,所需列车制动距离最短;而最不利制动工况,即列车经历失控加速、惰行、制动建立及制动实施这4 个阶段后,达到停车状态,所需列车制动距离最长。面向虚拟连挂的城轨列车群组内相邻列车运行最小安全追踪距离需基于相对移动闭塞进行核算,其最危险状态在于:后车在最不利情况下制动和制动距离最长,且前车在最有利情况下制动和制动距离最短,如图2 所示。若在此最危险状态下虚拟连挂列车群组内部列车不出现追尾状况,则其他任意工况下,组内相邻列车均能安全运行。

图2 城轨列车群组内相邻列车制动最危险工况Fig.2 Safety braking paradigm for adjacent trains within an urban mass rail train group
如图2 所示,前车为最有利制动工况,后车为最不利制动工况,后车从开始制动到停车经历5个阶段:车载设备反应阶段BC、动力切除阶段CD、紧急制动建立前阶段DE、紧急制动建立阶段EF及紧急制动实施阶段FG。AB段表示前车制动开始至后车制动开始的阶段,该阶段内只有前车处于制动状态,而后车仍处于运行状态,因此,计算后车的制动距离时暂不考虑AB段。此时,前车j在最有利条件下的制动距离(HJ段)和后车i在最不利条件下的制动距离(BG段)为
式中:为前车制动前初始运行速度;b为紧急制动减速度;分别为后车在阶段BC、阶段CD、阶段DE、阶段EF和阶段FG的列车走行距离,对应后车最不利制动工况的5个阶段。后车在5个阶段内走行距离分别为
式中:为后车制动前初始运行速度;tS为后车车载设备反应时间;tQ为后车切除牵引(或制动)时间;tK为后车紧急制动空走时间;tU为后车紧急制动建立时间;a为最大牵引加速度;ω值为0.5,即将50%的列车紧急制动减速度作为EF阶段的列车平均减速度。由式(1)~式(6)所知,在制动性能一定的前提下,即设备反应时间、切除牵引时间、制动建立时间及最大牵引加速度等参数已知,前后车的制动距离仅受列车初始速度影响。如图2所示,前车在H点开始制动时,对应至后车为A点,前车经历车载设备反应时间后到达I点,此时,前车通过车车通信向后车发送减速信息,再经过车车通信延迟时间,后车在B点接收到前车减速信息后,开始制动。是前车开始制动到后车开始制动期间后车行驶的距离,受车车通信延迟时间tY的影响,为
由图2所示,前车在最有利条件下的制动距离(HJ段)已经包含一个前车车长Lt,不妨设虚拟连挂列车群组任意两相邻列车之间的安全余量为Ls,最危险制动状态下,虚拟连挂列车群组内相邻列车间距即为面向虚拟连挂的城轨列车群组内最小安全追踪距离。
城轨列车群组间采用移动闭塞制式运行,城轨列车群组头车l和前一群组的尾车间距必须满足群组间列车最小安全追踪距离要求,群组间列车最小安全追踪距离为
2 基于CA的城轨列车群组追踪运行仿真模型构建
设最短编组城轨列车为一个标准车,以一列标准车车长为基准将线路和车站划分为若干连续的元胞单元,每个元胞单元最多被一列标准车占用;元胞被列车占用时,该元胞下一时刻状态与自身及其邻居元胞状态相关;元胞未被占用时,该元胞下一时刻状态仅与其自身状态相关;其他非标准车按其列车长的倍数向上取整换算成标准车。设Xi(t)、Vi(t)和Vc,i(t)分别表示为t时刻城轨列车i的走行位移、实时速度和推荐速度,Si(t)为t时刻该列车i与其相邻前车间的距离,Vmax(t)为列车i在该时刻的最大允许运行速度,则t时刻列车i的状态表示为βi(t)=[Xi(t),Vi(t),Vc,i(t),Si(t),Vmax(t)]T。面向虚拟连挂的城轨列车群组元胞状态更新过程如图3所示。
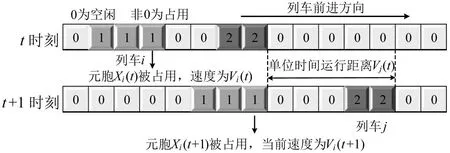
图3 面向虚拟连挂的城轨列车群组元胞状态更新示意Fig.3 Status update diagram of urban mass rail train group cell for virtual coupling
如图3所示,元胞状态为0时,表示元胞未被列车占用;非0时,表示元胞被占用,1和2代表不同编组类型,例如3 编组和6 编组城轨列车等。城轨列车一般按上下行分开运行,除列车折返外,上下行相对独立运行,若不考虑列车折返运行的因素,城轨列车上下行运行过程基本一致。便于问题简化,以某一方向为背景设计面向虚拟连挂的城轨列车群组追踪运行速度及位移更新规则,如图4 所示,列车由车站1 开往车站2 方向,包括:列车出站、区间运行和列车进站这3个不同的阶段。
图4 相邻车站及其列车运行关键控制点关系Fig.4 Relationship diagram of adjacent stations and their train operation critical control points
如图4所示,任意城轨列车两相邻车站经由区间线路相连,列车进出站运行关键控制点包括:停车点、保护区段计轴点和站台区域限速起点等,其中,I 为车站1 的停车点;Ⅱ为保护区段计轴点;Ⅲ为车站2 的站台区域限速起点;Ⅳ为车站2的停车点。
面向虚拟连挂的城轨列车群组在不同运行阶段的速度及位移更新规则如下。
1)出站阶段,即列车在Ⅰ-Ⅱ区段内运行(直至列车尾部完全出清,离开计轴点Ⅱ)。
(1)列车出站时满足站台限速要求,即列车车尾完全出清离开计轴点Ⅱ前运行速度不能超过站台限速VL。当V(t)≤VL时,V(t+Δt)=min{V(t)+a⋅Δt,VL} ;当V(t)>VL时,V(t+Δt)=VL。其中,V(t)为t时刻列车的速度;Δt为步长。
(2)满足列车最小安全追踪距离要求。若列车与前车间距小于虚拟连挂模型最小安全追踪距离,则减速;大于,则加速。否则,速度不变。
①头车l更新规则
当Sl时,Vl(t+Δt)=max{Vl(t)-b⋅Δt,0} ;当Sl>时,Vl(t+Δt)=min{Vl(t)+a⋅Δt,Vc,l(t)};当Sl=时,Vl(t+Δt)=Vl(t)。其中,Sl为头车l与前一列车群组中尾车间的距离;Vl(t)为头车l当前速度;为头车l与前一虚拟连挂列车群组中尾车间的最小安全追踪距离,由式(9)计算得出;t时刻头车l的推荐速度Vc,l(t)的求解规则[12]为
头车l使用移动闭塞制式追踪。
②非头车f更新规则
当Sf <时,Vf(t+Δt)=max{Vf(t)-b⋅Δt,0} ;当Sf >时,Vf(t+Δt)=min{Vf(t)+a⋅Δt,Vc,f(t)};当Sf=时,Vf(t+Δt)=Vf(t)。其中,Sf为非头车f与前车间的距离;Vf(t)为非头车f当前速度;为虚拟连挂模型内列车f与前车间最小安全追踪距离,由式(8)计算得出;t时刻非头车f的推荐速度Vc,f(t)的求解规则为
式中:Vq(t)为非头车f前方相邻车辆q的当前速度。非头车f使用相对移动闭塞制式追踪。
2)区间运行阶段,即列车在Ⅱ-Ⅲ区段内运行。
(1)满足列车最小安全追踪距离要求。
①头车l更新规则
②非头车f更新规则
(2)在运行过程中,实时监测列车车头距离前方车辆及车站的位置,依据推荐速度控制区间内列车速度。
①头车l更新规则
当Vl(t)>Vc,l(t)时,Vl(t+Δt)=Vl(t)-b⋅Δt,Xl(t+Δt)=Xl(t)+Vl(t)⋅Δt-0.5 ⋅b⋅Δt2;当Vl(t)=Vc,l(t)时,Vl(t+Δt)=Vl(t),Xl(t+Δt)=Xl(t)+Vl(t)⋅Δt;当Vl(t) ②非头车f更新规则Xf(t+Δt)=Xf(t)+Vf(t)⋅Δt-0.5⋅b⋅Δt2;当Vf(t)= 当Vf(t)>Vc,f(t)时,Vf(t+Δt)=Vf(t)-b⋅Δt,Vc,f(t)时,Vf(t+Δt)=Vf(t),Xf(t+Δt)=Xf(t)+Vf(t)⋅Δt;当Vf(t) (3)如果前方站台区域有车,追踪列车须在站台区域限速起点Ⅲ前停下来。 当{lⅣ(t)>S>lⅢ(t)}且{lⅢ(t) 3)进站阶段,即列车在Ⅲ-Ⅳ区段内运行。 (1)列车进站时满足站台限速要求,即列车车头到达车站2 的停车点Ⅳ前运行速度不能超过站台限速VL。 当V(t)≤VL时,V(t+Δt)=min{V(t)+a⋅Δt,VL} ;当V(t)>VL时,V(t+Δt)=VL。 (2)如果列车到站台停车点的距离小于制动距离,则减速。 当lⅣ(t)>lb(t)时,V(t+Δt)=min{V(t)+a⋅Δt,VL} ;当lⅣ(t) 上述即为基于元胞自动机(Cellular Automata,CA)的城轨列车群组追踪运行仿真模型。为便于对比分析,选取列车最小安全追踪间隔时间、线路通过能力、平均旅行速度、抗干扰性及恢复性能、列车晚点总数量及总晚点时间等作为面向虚拟连挂的城轨列车群组追踪运行性能评价指标。 以某市地铁2号线为背景开展仿真研究,参数设置如表1所示。 表1 仿真参数设置情况Table 1 Simulation parameter settings 目前,国际标准中,车地通信延迟通常为0.5~2.0 s;虚拟连挂对车车通信质量要求更高,高铁列车控制业务与列车运行状态业务在低违约率下的时延分别为102 ms 与126 ms[19],特选取0.1 s 作为仿真的车车通信延迟时间。结合该市2号线CBTC系统(Communication Based Train Control System)性能指标及国际标准,列车制动性能参数取值如表2所示。 表2 列车制动相关性能参数Table 2 Train braking related performance parameters 结合表1、表2 及式(1)~式(8),虚拟连挂列车群组内最小安全追踪距离为 在列车制动性能固定的情况下,面向虚拟连挂的城轨列车群组内最小安全追踪距离跟前后车车长无关,仅受到前后列车运行速度影响。将3编组列车设为标准车,6编组则相当于2列标准车;列车初速度均设为0,结合所构建的城轨列车群组追踪运行仿真模型,更新列车位移和速度,评估其追踪性能。 (1)列车最小安全追踪间隔时间仿真分析 列车最小安全追踪间隔时间是影响城轨列车发车间隔和线路通过能力的重要要素,考虑不同编组类型和区间闭塞制式对列车最小安全追踪间隔时间的影响。 列车最小安全追踪间隔时间[12]为 结合表1和表2中参数,将式(13)代数化简为 不同闭塞制式及列车编组类型对列车最小安全追踪间隔时间的影响如图5 所示。由图5 可得,在列车运行过程中,虚拟连挂模型下,列车最小安全追踪间隔时间普遍小于移动闭塞制式下的,当列车运行速度达到80 km ⋅h-1时,虚拟连挂模型下,列车最小安全追踪间隔时间仅为移动闭塞制式下的12,同时,开行3编组列车相较于6编组列车能进一步压缩列车最小安全追踪间隔时间,为实现地铁的高密度发车和提高乘客出行满意度提供条件。采用虚拟连挂模型相较于移动闭塞可有效压缩列车最小安全追踪间隔时间达44.5%,小编组列车的运输能力更强。结合最小安全追踪间隔时间的仿真结果,利用MATLAB 分析不同闭塞制式及列车编组类型对线路通过能力的影响,结果如图6所示。 图5 不同闭塞制式及列车编组类型对列车最小安全追踪间隔时间的影响Fig.5 Influence of different block systems and train formation types on minimum safe tracking interval of trains 图6 不同闭塞制式及列车编组类型对线路通过能力的影响Fig.6 Influence of different block systems and train formation types on passing capacity of line 结合图5 和图6 进行数据分析,随着列车运行速度的提高,列车最小安全追踪间隔时间先减小,当达到特定的速度条件时,列车最小安全追踪间隔时间取到最小值,而当运行速度超过该特定速度条件时,列车最小安全追踪间隔时间随列车运行速度的提高逐渐增大,相应的线路通过能力也逐渐减小。虚拟连挂模型下的线路通过能力普遍大于移动闭塞条件下的,当列车运行速度达到80 km∙h-1时,虚拟连挂模型下,线路通过能力为移动闭塞制式下的2倍,同时,开行3编组列车更能够提高线路通过能力与运输效率。虚拟连挂模型相较于移动闭塞,可有效提升线路通过能力达78.4%,能满足高峰期极端情况运力需求,开行小编组列车更有助于提升线路通过能力。 (2)基于CA 的虚拟连挂列车旅行速度仿真分析 以某市地铁2号线为背景,构建虚拟连挂列车群组运行通过3 个连续车站的CA 仿真场景,将列车通过3 个车站的运行过程分为3 个阶段,设置列车的发车间隔为90 s,得出3 个阶段内虚拟连挂列车群组旅行速度仿真结果如图7所示。 图7 不同编组类型下虚拟连挂列车群组旅行速度仿真结果Fig.7 Simulation results on travel speed of train group with virtual coupling under different formation types 由图7 可得,虚拟连挂模型下,3 编组列车在3个阶段内的旅行速度均大于6编组列车,且由于虚拟连挂列车群组内采用相对移动闭塞制式实现列车运行控制,故虚拟连挂列车群组中的后车相较于采用移动闭塞制式实现控制的前车而言,列车旅行速度更大。开行小编组列车能够有效提高列车平均旅行速度,压缩列车运行周期,提高线路运输效率。 (3)基于CA 的虚拟连挂列车延迟传播性仿真分析 设定列车发车间隔为50~100 s 的区间,每隔5 s 取值1 次,在位置X=1000 m 处设置一个车站X,初始化车站元胞;每隔一个发车间隔就从初始发车位置X0处产生1列新列车,并按照演化规则控制速度。通过仿真绘制头车延迟时不同闭塞制式下,3 编组和6 编组类型的列车群组追踪运行模型位移时间曲线,设置发车间隔为50 s,头车延迟时间为60 s,仿真时间为200 s,仿真结果如图8和图9所示。 图8 元胞自动机模型列车3、6编组位移时间对比Fig.8 Comparison diagram of displacement and time of 3 and 6 formation trains of cellular automata models 图9 闭塞制式及列车编组类型对列车延迟传播性的影响Fig.9 Influence of block system and train formation type on train delay propagation 由图8 可知,移动闭塞制式下,列车受头车延迟干扰的影响较大,后续列车分布疏松,编组间追踪距离较大,且同一编组列车多次出现区间内停车现象,而虚拟连挂模型下,列车分布均匀规律,且密集紧凑,后续列车间能够保持一个较小的间隔距离追踪运行,且追踪间隔距离随时间累积持续减小,最终维持在列车最小安全追踪距离。虚拟连挂模型相较于移动闭塞制式呈现出更强的抗干扰性与更快的恢复性能。 发车间隔、编组类型及闭塞制式这3种因素对列车延迟传播性的影响如图9所示。由图9得出结论:发车间隔与列车延迟传播性呈负相关,虚拟连挂模型及3 编组条件下的列车晚点总数量及总晚点时间较移动闭塞制式及6编组条件下而言更小;运用虚拟连挂模型及开行小编组列车可增强列车追踪运行过程中对于突发情况的应对能力,提高列车追踪过程的抗干扰性及恢复性能。 (1) 列车动态编组类型对列车旅行速度的影响。选取虚拟连挂列车群组尾车平均旅行速度作为代表性指标进行仿真,运用列车平均旅行速度普遍计算公式对移动闭塞及虚拟连挂两种模型下的3/6B、6/3B、3/6/3B、6/3/6B这4种动态编组及单一3编组和6编组共6种编组类型开展仿真研究,结果如图10所示。 图10 列车动态编组类型及闭塞制式对平均旅行速度的影响Fig.10 Influence of train dynamic formation type and block system on average travel speed 对数据进行纵向分析可知:虚拟连挂模型列车不同编组类型下的平均旅行速度均在35 km∙h-1以上,且普遍比移动闭塞情况下的平均旅行速度大,即在列车停站时间相同的情况下,虚拟连挂模型列车的区间运行时间更短,运输效率更高。对数据进行横向对比可知:动态灵活编组及开行小编组列车的运行模式能够提高列车的平均旅行速度,6/3B、3/6B、6/3/6B、3/6/3B、单一3编组、单一6编组这6种编组类型的列车平均旅行速度依次递减。采用大编组列车群在前,小编组列车群在后的虚拟连挂动态编组方式,列车平均旅行速度最大。 (2)列车动态编组类型对列车延迟传播性的影响。针对3/6B、6/3B、3/6/3B、6/3/6B 这4 种动态编组类型下,虚拟连挂列车群组的延迟传播性进行分析比较,结果如图11所示。由图11可得,大小编组列车的调度顺序以及编组数量均会对列车延迟传播性产生影响,不同编组类型列车受延迟干扰后的列车晚点总数量及列车总晚点时间不同,具体来看,6/3B、6/3/6B、3/6B、3/6/3B 这4 种编组方式的抗干扰性及受延迟干扰后的恢复性能依次递减,其中,大编组列车群在前和小编组列车群在后实现虚拟连挂的6/3B、6/3/6B两种编组类型较小编组列车群在前和大编组列车群在后的3/6B、3/6/3B两种而言,列车追踪运行的抗干扰性及恢复性能更佳。采用大编组列车群在前,小编组列车群在后的虚拟连挂动态编组方式,列车追踪运行的抗干扰性及恢复性能更强。 图11 列车动态编组类型对延迟传播性的影响Fig.11 Influence of train dynamic formation type on delay propagation (1)平均站间距对虚拟连挂列车旅行速度的影响。列车旅行速度的计算与第k个车站的停站时间TD,k(k=1,2,…,n,n为车站数)和第k′个区间的运行时间TQ,k′(k′=1,2,…,n′,n′为区间数)有关,其中,TD,k由开门时间、乘客上下车时间及关门时间这3部分组成;TQ,k′通常根据牵引计算获得,这里运用由CA模型仿真获得的虚拟连挂列车群组区间运行时间。旅行速度为 式中:Vt为列车旅行速度;LZ,k′为第k′个站间距长度。对平均站间距在0.5~2.1 km 情况下的虚拟连挂列车群组旅行速度进行仿真计算,得出结果如图12所示。 图12 平均站间距对虚拟连挂列车群组旅行速度的影响Fig.12 Effect of average station spacing on travel speed of train group with virtual coupling 由图12 可得,城轨列车群组旅行速度整体上与平均站间距呈线性正相关,尤其是当平均站间距处于1.1~1.3 km 时,旅行速度增幅较大,平均站间距对旅行速度的作用进而影响了列车的到达和发车时间,考虑到站间距的大小会对地铁的客流吸引力及乘客满意度造成影响,故地铁的平均站间距不能过大。 (2)平均站间距对虚拟连挂列车延迟传播性的影响。城市轨道交通站间距大多数介于500~1600 m,对于虚拟连挂列车群组在不同站间距下其运行抗干扰性及受延迟干扰后恢复性能进行仿真评估,结果如图13所示。 图13 虚拟连挂列车延迟传播性与平均站间距之间的关系Fig.13 Relationship between propagation of trains with virtual coupling and average station spacing 由图13 可得,当虚拟连挂列车群组发车间隔大于延误时间时,平均站间距对列车群组的延迟传播性影响不敏感,不同站间距情况下,列车总晚点时间最大差值仅为6 s,晚点总数量最大差值仅为2 辆,列车晚点总数量及列车总晚点时间随平均站间距的变化波动不明显。在虚拟连挂列车群组所能实现的最小发车间隔情况下,平均站间距的局部最优解为1122.22 m,此时,列车晚点总数量和列车总晚点时间均取到极小值。 (1)设计一种面向虚拟连挂的城轨列车群组追踪运行仿真方法,定量分析虚拟连挂、动态编组和平均站间距对列车群组追踪运行性能的影响,为面向虚拟连挂的城轨列车群组追踪运行提供决策支持。 (2)面向虚拟连挂的列车群组追踪运行性能明显优于移动闭塞,动态混合编组、单一小编组及单一大编组的列车群组追踪运行性能依次降低,且大编组在前和小编组在后的动态混合编组的性能最好;列车旅行速度总体上与平均站间距呈线性关系;适度加大列车发车间隔,尽可能降低列车延误时间,能有效缓解城轨平均站间距对虚拟连挂列车延迟传播性的影响,提高城轨列车群组追踪运行的稳定性。3 仿真分析

3.1 虚拟连挂列车群组追踪运行性能分析



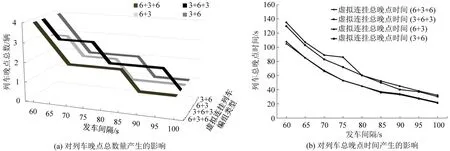
3.2 动态编组类型对虚拟连挂列车群组追踪运行性能的影响分析
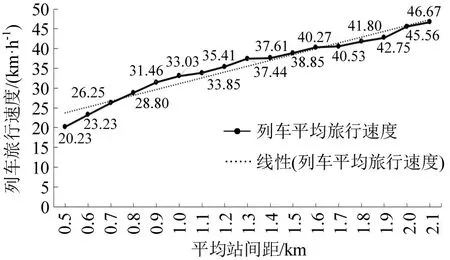
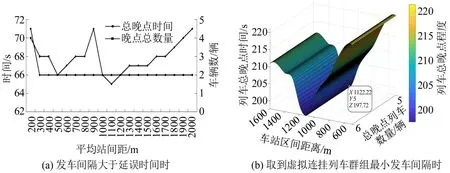
3.3 平均站间距对虚拟连挂列车群组追踪运行性能的影响分析
4 结论