基于机器视觉的变电站高压电气设备绝缘自动监测方法
2024-03-03穆文静
穆文静
(合肥职业技术学院机电工程学院,安徽合肥 230000)
0 引言
变电站由很多高压电气设备组成,其安全运行是电力系统稳定的重中之重[1].在高压电气设备故障当中,最主要的就是绝缘故障,它是由于设备长时间的使用导致绝缘材料老化、污染和损坏等原因造成的,其直接后果就是产生局部放电现象[2],如果不能及时处理就会导致严重的电力事故,所以对绝缘故障进行有效检测可以有效避免事故的发生,减少经济损失,保证变电站的安全运行.
传统的绝缘故障检测方法是采用人工巡检和离线实验等方法,但是这样不仅浪费资源,而且速度慢、效果差,导致很多绝缘故障不能得到及时有效地处理,从而引发事故[3].所以,如何快速有效地实现变电站高压电气设备绝缘自动监测就成了亟待解决的问题[4].
赵庆生等人[5]采用BOF(Bag of features,BOF)图像检索算法分类电气设备图像,通过加速鲁棒特征(SURF)算法寻找特征点位置,使用训练集图像进行深度学习,从而分类电气设备图像,识别绝缘故障.赵欢等人[6]通过卷积神经网络进行图像特征提取,使用边框回归算法,进行电气设备绝缘故障的识别.但是这两种方法都缺乏实时性,而且在图像处理时受背景影响较大,导致绝缘故障的识别结果不准确,出现空洞现象.
我国近年来一直在发展智能电网,实现变电站高压电气设备绝缘检测的实时性和工作人员的移动化是未来发展的必然趋势,随着智能视频监控技术的发展,研究人员也提出了电力系统智能检测的概念[7].同时机器视觉中的多轴平行摄影技术也被越来越多地应用于电力系统无人机自动巡检和测量方面,取得了很好的定位效果[8],结合多轴平衡摄影探头,将可见光、红外光和紫外光三者结合,可以实现更加精确的测量[9].
因此,本文提出了一种基于机器视觉的变电站高压电气设备绝缘自动监测方法,结合机器视觉中的多轴平行摄影技术和智能视频监控技术,实现对电气设备的绝缘故障进行远程实时监测,从而达到自动化、智能化、实时性等要求,能够大幅度减少资源浪费,降低维护费用,具有极其显著的经济效益.
1 变电站高压电气设备绝缘自动监测
1.1 总体方案设计
本文将基于机器视觉的图像采集和处理技术应用于变电站高压电气设备绝缘自动监测,通过在变电站现场安装多轴平行摄影探头,实时监测各个部位高压电气设备的绝缘情况,并将采集到的异常现象图像发送至PC 端做进一步处理.当发生绝缘故障时,摄像头采集到的图像会发生明显的变化,这些局部异常现象即为运动前景对象,利用四帧差分算法对采集到的异常现象图像进行前景目标检测,经Canny 边缘检测算法处理后识别绝缘故障,并储存图像数据,采用三点定位法计算绝缘故障的具体位置,输出最终的计算结果,即绝缘故障发生时的准确图像和定位,从而实现变电站高压电气设备绝缘自动监测,具体流程用图1表示.

图1 绝缘自动监测方法流程图Fig.1 Flow chart of automatic insulation monitoring method
1.2 图像采集和预处理
1.2.1 基于机器视觉的多轴平行摄影技术 本文采用机器视觉中的多轴平行摄影技术,运用平行轴镜头的方法,融合可见、紫外和红外三种光源,通过CMOS感光元件进行结构重组,能够进行不同波普的图像采集,从而更好地判断绝缘故障的发生情况[10].本文进行绝缘自动监测时选用多轴平行摄影探头,其设计原理是采用光轴平行的方法,将三个不同波段的摄影探头进行组合,构建成一个整体的摄像头.其主要结构用图2表示.

图2 多轴平行摄影探头结构图Fig.2 Structure of multi-axis parallel photography probe
图2中,可见光摄像头需要采集高清图像,所以需要很高的探头解析度,需要达到频率60帧/s、画质2K(1 920×1 080 像素)以上.紫外和红外探头选用频率60 帧/s、640×480像素的设备即可,因为二者的画面数据量较小,所以无需太高的探头解析度.
嵌入系统有两个计算功能:
(1)当三个摄像头捕捉到一项以上的异常现象时,即刻储存实时单帧数据,并标定具体时间,发送到PC端进行分析处理.异常现象包括:异常闪光、紫外辐射点和异常瞬时高温.
(2)将可见光、紫外和红外三个探头的数据叠加处理,得出更加准确的异常现象图像.
1.2.2 图像预处理 为了使图像检测更加快速和准确,过滤多余信息,减少待处理的数据总量,本文结合中值滤波和双边滤波两种方法对采集到的异常图像进行预处理.
(1)中值滤波
中值滤波是一种可以有效过滤非线性噪声的滤波方法,它用像素点领域内像素的中值替换像素点,让邻近的像素值与实际情况更加类似,从而去除个别特异的噪声点,大幅度改善图像细节不清的问题,对于校验噪声和脉冲干扰非常有效[11],具有很好的除噪效果.
假设中值滤波的对象为一维序列x1,x2,x3,...,xn,从中依次选择m个数,将其按照大小顺序排列,提取出其序号中心点对应的那个数,公式为:
(2)双边滤波
双边滤波与中值滤波类似,同属于非线性滤波法,可以在滤波的同时更好地保护边缘像素信息[12].滤波后图像点的灰度值公式为:
式中归一化系数用k表示,其公式为:
式中,中心图像点与邻域图像点分别用x、ζ表示,中心图像点与邻域点的灰度相似度为s,中心图像点和领域点的空间相似度为c,通过高斯函数表现函数s和c:
其中,σ表示图像方差.
1.3 绝缘故障自动监测
1.3.1 四帧差分算法的绝缘故障前景获取 本文采用四帧差分算法对预处理后的异常现象图像进行分析,从中识别到绝缘故障前景目标.四帧差分算法解决了三帧差分算法中图像出现空洞或者不完整现象的问题[13],可以有效识别变电站高压电气设备在发生绝缘故障时产生的局部放电现象,并清晰地分辨局部区域的明暗变化.其具体运算步骤用图3表示.

图3 四帧差分算法应用流程Fig.3 Application flow of four-frame differential algorithm
四帧差分算法分为以下三个步骤:
(1)从摄像头采集并进行预处理后的异常现象图像中选取四帧相邻的像素,假设从第一帧到第四帧分别为Ik(x,y)、Ik+1(x,y)、Ik+2(x,y)、Ik+3(x,y),将两帧之间的差值分别进行运算,得出灰度图像DFk,k+3和DFk+1,k+2,其公式如下:
(2)将摄像头采集并预处理后的异常现象图像进行二值化处理,设定一个区间值X为参考阈值,得出的二值化图像用Mk,k+3和Mk+1,k+2表示,其公式为:
(3)将Mk,k+3和Mk+1,k+2进行“与”操作,即可得出Mk,当Mk=1 时,说明获取到了变电站高压电气设备绝缘故障前景目标的最终运动轨迹,即为绝缘故障在图像中的具体信息,公式如下:
1.3.2 基于Canny 边缘检测的绝缘故障前景边缘检测 通过四帧差分算法获取绝缘故障图像后,需要提取该图像的边缘轮廓,以便更加准确地提取局部放电现象的详细信息[14].本文采用Canny边缘检测算法提取绝缘故障前景目标的完整边缘轮廓信息,得到边缘轮廓准确清晰的绝缘故障图像.Canny边缘检测的具体过程如下:
(1)平滑图像,使用高斯滤波器.其公式为:
式中,原始图像和平滑后的图像分别为f(x,y)和g(x,y),卷积为*,高斯平滑函数为h(x,y,σ).
(2)运算梯度的幅值和方向,采用一阶有限差分2 × 2运算平滑后的g(x,y)图像,分别求解出x,y偏导数的两个阵列fx′(x,y)和fy′(x,y),其公式如下:
为了让图像可以在同一点运算x,y的偏导数梯度,可以在2 × 2 的正方形内求出差分的均值,并使用直角坐标转化幅值和方位角的坐标:
其中图像边缘的强度和方向分别用幅值M(x,y)和方位角θ(x,y)描述,当前者处于局部最大值的状态时,后者就代表边缘的方向.
(3)用非极大值抑制梯度幅值,保留局部梯度的最大值点,将其他非极大值点设置为0,保留边缘点,去掉非边缘点.
(4)将边缘进行检测和连接,通过设定一个高阈值获取假边缘较少的边缘图像,再设定一个低阈值连接边缘,在轮廓端点处3 × 3领域中,找到一个适合的低阈值点提取新的边缘信息,重复进行此步骤,直到边缘轮廓完整为止.
完成以上步骤即可得出边缘轮廓准确清晰地绝缘故障图像,以便后续变电站工作人员进行检修和维护.
1.4 绝缘故障定位
因为绝缘故障产生的局部放电现象在可见光、紫外光和红外光三种摄像头的各个光源频谱上都有明显的反映,所以根据倾斜摄影的定位原理,可以计算出局部放电现象发生的位置[15].
基于绝缘故障图像利用三点定位法对绝缘故障发生的具体位置进行定位.以外部空间比较宽松的摆杆式高压断路器为例,在四周不同的方位安装3个多轴平行摄影探头,与断路器的距离在12~18 m 左右,通过三种摄像头进行不同光谱的数据采集,同时利用三点定位法获得绝缘故障发生的位置,其公式如下:
其中,绝缘故障定位点的三轴坐标用(x0,y0,z0)表示,三个多轴平行摄影探头的三轴坐标分别用(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)表示,根据光学原理取得的绝缘故障发生位置与三个探头之间的距离分别用L1、L2、L3表示.
为了准确的定位绝缘故障发生的具体位置,需要获得(x0,y0,z0),因为可以直接取得三个摄像头的坐标,分别求解出距离量L1、L2、L3,以每个探头为圆点画圆,其三个距离向量即为这三个圆的半径,求得三个圆的交点即为绝缘故障的具体位置,从而达到定位效果.
最后将所获得的绝缘故障图像和具体位置发送到PC端,实现变电站高压电气设备绝缘自动监测,以供工作人员后续对该高压电气设备进行检修和维护.
2 实验及分析
选择某220 kV变电站作为实验场所,该变电站占地面积为2 156 m2,全站采用GIS结构,配备两台容量为240兆伏安的变压器,220 kV 出线6回.由于在变电站实际运行过程中进行实验具有很大的安全隐患和不确定性,所以本文选取变电站其中一部分高压电器绝缘设备进行独立实验,设置绝缘故障触发功能,进行5种不同规模和不同位置的异常放电实验,每种10次.
2.1 放电实验
本文方法主要是通过机器视觉中的多轴平行摄影技术对变电站高压设备的绝缘故障进行检测和识别,通过可见光、紫外光和红外光等电磁辐射判断是否发生异常放电现象,所以本文方法的判断准确率是非常重要的一个分析指标.主要包括三个方面:一是敏感性,即判断绝缘故障的正确率;二是特异性,即判断非绝缘故障的正确率;三是绝缘故障的定位精度.具体实验结果如表1所示.

表1 不同规模异常放电实验结果对比Tab.1 Comparison of abnormal discharge test results of different scales
从表1中可以看出,在不同规模和不同位置放电的情况下,本文方法对于绝缘故障自动监测识别的敏感性和特异性都比较高,定位的精度也很高,最低为91.38%,最高可达98.63%,而且放电规模越大、强度越高、识别的准确度就越高,说明本文方法判断和定位的准确率较高,且稳定性良好.
2.2 绝缘故障检测结果对比
为了验证本文方法在绝缘故障检测中的效果,选用文献[5]的基于BOF图像检索的绝缘故障识别方法和文献[6]的基于边框回归的绝缘故障识别方法进行对比实验,其中每种方法的视频单帧处理速度小于1/25 s(45.2 ms),视频在白天进行拍摄,使用1 280×720分辨率,在达到实时监测的同时,提高检测精度.实验结果用图4表示.
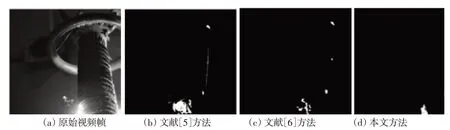
图4 绝缘故障检测结果对比Fig.4 Comparison of insulation fault detection results
从图4 中可以看出,对于发生的绝缘故障局部放电现象,采用文献[5]方法检测的结果产生了大规模的误检现象,明显受到了放电所产生强光的影响,检测结果出现了很大偏差.文献[6]方法只检测到了故障区域的边缘部分,内部出现了很大的空洞.而本文方法由于采用了四帧差分算法,使得抗背景干扰能力强,能够准确完整的检测出故障发生的区域,并解决图像空洞问题,具有良好的检测性能.
为了进一步对比三种方法对绝缘故障放电现象的检测准确度和检测时间,本文共采集了10 个局部放电的有效视频数据,每个视频时长5min 左右,平均每段视频会产生6 次放电现象,其实验结果用表2来描述.

表2 三种方法绝缘故障检测结果对比Tab.2 Comparison of insulation fault detection results of three methods
从表2当中可以看出,三种方法的检测准确度具有很大的差别,但在处理速度上基本达到合格水平.其中文献[5]方法的准确率只有91.67%,单帧处理时间最长,虽然没有漏检情况,但是误检却多达5 次.文献[6]方法虽然没有误检现象发生,但是也造成了3 次漏检.而本文方法由于采用了四帧差分算法,表现十分优异,不仅单帧处理时间仅为21 ms,而且也没有出现误检现象,准确率可以达到98.34%.
实验表明本文方法对于变电站高压电气设备的绝缘故障具有很好的检测效果,不仅准确率高、速度快,还可以防止误检和漏检的发生.
2.3 Canny边缘检测结果与分析
在得出准确的绝缘故障图像之后,需要进行边缘提取,本文选择两张绝缘故障的检测结果图片,使用Canny边缘检测算法进行处理,其实验结果用图5表示.
从图5 当中可以看出,使用Canny 边缘检测算法对绝缘故障图像进行处理后,图像中局部放电部位的轮廓细节都得到了很好地保留,与未处理的图像有明显区别,可以提取出完整的边缘轮廓,以便工作人员后续的研究和维修.
3 结论
本文采用基于机器视觉的图像采集和处理技术,通过四帧差分算法识别绝缘故障,结合三点定位法获得绝缘故障发生的位置,实现变电站高压电气设备绝缘自动监测.实验表明:
(1)本文方法对于变电站高压电气设备的绝缘故障自动监测,具有很高的判断和定位准确率,且稳定性良好,不仅检测速度快,还可以防止误检和漏检现象的发生.
(2)本文方法抗背景干扰能力强,能够准确完整地检测出绝缘故障发生的区域,还可以解决图像空洞的问题,可以改善其他检测方法的缺点.
(3)本文方法使用Canny 边缘检测算法对绝缘故障图像进行处理,可以提取出完整的边缘轮廓,以便工作人员后续的研究和维修.
