融合多工况功率谱密度函数的工作模态分析方法
2024-03-02曾舒洪孙嘉宝
曾舒洪, 康 杰, 孙嘉宝, 罗 杰
(南京航空航天大学 航天学院,南京 211106)
工作模态分析(operational modal analysis,OMA)[1]方法通过对结构在环境激励下输出响应测量的分析,提取反映结构动力学特性的模态参数。模态参数在结构设计、结构健康监测以及工作状态下结构的振动控制等方面具有重要的应用价值[2-4],因此快速精确地识别模态参数十分必要。频域分解(frequency domain decomposition,FDD)法是OMA的一种,最早由Brincker等[5]提出,该方法在结构受白噪声激励以及结构小阻尼的前提下,可较好的识别结构的固有频率和模态振型,且可识别结构的密集模态。然而,结构在工作状态下受到非白噪声激励现象普遍存在,非白噪声激励的功率谱密度在关心频带内不是常数。根据关心频带内激励频谱的峰值形式,非白激励可分为三类:①存在谐波成分的环境激励,如结构旋转部件产生的谐波激励[6];②存在激励主频的噪声激励,如运载火箭飞行时受到的发动机推力振荡[7];③不存在主频的非平谱噪声激励,如嘈杂环境中的声波激励[8]。三类非白激励功率谱密度曲线如图 1所示。
上述三类非白激励中,前两类均会产生虚假模态,第三类会引起有偏的辨识结果且存在弱模态辨识问题,本文仅讨论前两类非白激励导致的虚假模态辨识问题。
目前,已有部分文献对非白噪声激励下模态识别问题开展了研究。Zhang等[9]提出基于Gabor展开的模态参数识别方法,可用于估计线性时不变系统在非白激励下的固有频率、阻尼比和模态振型,但该方法不适用于存在密集模态的结构。Brincker等[10]提出基于响应的概率密度函数(probability density function,PDF)区分结构的谐波响应和随机响应,但当结构模态阻尼比很小时,其模态频率处峰值与谐波峰值形状相近,该方法失效。Guillaume等[11]提出了响应传递率的概念并将其用于非白激励下的模态辨识;为克服传递率方法需要多个激励工况的问题,Yan等[12]提出了基于功率谱密度传递率(power spectral density transmissibility,PSDT)的模态识别方法。该方法结合同一工况下不同转移通道对应的PSDT函数,成功辨识出结构的模态参数。在此基础上,Yan等[13-14]提出了一系列改进方法,降低了PSDT方法辨识虚假极点的风险。目前,PSDT方法在工程中广泛运用,但其原理为PSDT矩阵的秩在模态频率处为1,非模态频率处大于1,因此该方法在以下情况失效:①结构受到谐波激励;②结构仅在一个位置受到非白噪声激励;③结构在多个位置受到非白噪声激励,但各位置处的非白激励是相关的。此外,PSDT类方法也无法识别结构密集模态。为解决上述问题,本文提出融合多工况功率谱密度(power spectral density ,PSD)函数的工作模态分析方法,并通过理论分析和试验验证,验证了该方法的有效性。
1 FDD方法原理
FDD法基本思想是先计算出响应的PSD矩阵,而后对矩阵进行奇异值分解(singular value decomposition,SVD),将多自由度系统转换为单自由度系统的叠加,从而识别出结构的模态参数。本章简要概述FDD方法的原理,详细推导见文献[15-16]。
结构激励PSD函数矩阵和响应的PSD矩阵的关系可表示为
Sxx(iω)=H*(iω)Sff(iω)HT(iω)
(1)
式中:上标“*”和“T”分别为矩阵的共轭和转置;i为虚部单位;ω为圆频率;Sff(iω),Sxx(iω)分别为结构激励和响应的PSD矩阵。在比例阻尼的假设下,结构频响函数(frequency response function,FRF)矩阵H(iω)可以用部分分式的形式表示为
(2)
式中:Nm为结构模态的阶数;λr为第r阶模态极点;Rr为第r阶模态留数矩阵,可表示为
(3)
式中,φr和γr分别为第r阶模态振型和模态参与因子向量。假设结构激励为白噪声,则激励PSD矩阵Sff(iω)在所有频率下为常数,将式(2)代入式(1)可得
(4)
式中:上标“H”为矩阵共轭转置;Ar为响应PSD的留数矩阵,可表示为
(5)
式中,C表示与激励PSD矩阵相关的常数Hermitian矩阵。在结构阻尼为小阻尼的假设下,第r阶模态极点可表示为
(6)
式中,ωn,r和ξr分别为第r阶无阻尼模态频率和相应的阻尼比。在小阻尼情况下,σr≪ωd,r,则第r阶留数矩阵Ar可简化为
(7)
进一步式可近似为
(8)
考虑关心频带内的所有结构模态,则式(8)可表示为
(9)
式中:ψ=[φ1φ2…φNm]为模态振型矩阵;diag(·)为对角矩阵;Re(·)为取复数实部。当频率接近第r阶有阻尼模态频率ωd,r时,其他模态可忽略,式(9)可简化为
(10)
对进行SVD可得
Sxx(iω)=UΣUH
(11)
式中:U为酉矩阵,各列为奇异向量且相互正交;Σ为由奇异值组成的实对角矩阵。
在第r阶有阻尼模态频率ωd,r附近,响应PSD矩阵Sxx(iω)可由式(10)近似,此时Sxx(iω)的第1阶奇异值远大于其余奇异值,矩阵U的第一列与模态振型成比例。因此,可通过Sxx(iω)第1阶奇异值的峰值位置确定模态频率,根据矩阵U第一列估计模态振型。当结构中存在密集模态时,模态频率处第1阶和第2阶奇异值均会出现峰值,此时密集模态的模态振型可通过矩阵U的第一列和第二列估计。
2 FDD方法性能分析
2.1 FDD方法性能影响因素分析
由第1章分析可知,在非密集模态频率处,结构响应PSD矩阵的秩为1,此时结构模态振型可由左奇异矩阵第一列估计;若结构在某一频率出现两阶密集模态,PSD矩阵的秩则为2,此时密集模态振型可由左奇异矩阵的第一列和第二列分别估计。因此,PSD矩阵的秩是影响FDD方法识别精度的决定性因素。本章通过对响应PSD矩阵秩的影响因素进行分析,揭示FDD方法在非白激励下存在的不足。
为表述简便,本章公式中略去虚部单位i。结构响应PSD矩阵可表示为如下分量形式
(12)
rank(H(ω))=min(No,Ni,nm(ω))
(13)
式中:nm(ω)为频率ω处的主要模态阶数;rank(·),min(·)分别为取矩阵的秩和最小值。
在实际应用中,响应PSD函数通过Welch方法计算,以减小统计误差[18]。Welch方法首先将测量的响应信号分割成多个数据段,然后对每个数据段加窗函数(Hanning窗、Hamming窗等)后计算PSD,最后所有数据段平均得到PSD估计值。如果将信号分割成Nw段,则PSD矩阵Sff(ω)可由下式计算
(14)
式中,f(ω)为第i个窗口激励向量,且F(ω)=[f1(ω)f2(ω) …fNw(ω)]。假设在结构上存在Nμ个不相关的激励源,且Nμ≤Ni,则式(14)中F(ω)的秩为Nμ。由于在环境激励中Nw个数据段近似不相关,F(ω)为列满秩矩阵,则
rank(F(ω))=min(Nw,Nμ)
(15)
结合式(13)和式(15),且考虑Nμ≤Ni,响应PSD矩阵Sxx(ω)的秩可表示为
rank(Sxx(ω))=min(No,Nμ,Nw,nm(ω))
(16)
由式(16)可以看出,响应PSD矩阵Sxx(ω)的秩满足以下性质:
(1)响应PSD矩阵Sxx(ω)的秩等于响应个数No、不相关激励源数Nμ、分割窗个数Nw、主导模态阶数nm(ω)中的最小值。
(2)响应PSD矩阵Sxx(ω)的秩与激励个数Ni无关。
(3)在非密集模态处,矩阵的秩为1。在密集模态处主导模态阶数nm(ω)≥2,则矩阵的秩>1。
你知道这个现象背后的意义吗?现在很多早教中心都已经把这个现象发展为一个特定的亲子游戏了,其背后的理论就是认为宝宝照镜子是在认识自己,这是一种以感官体验建立与周围事物联系的训练方法。
2.2 FDD方法的不足
如第1章所述,FDD方法的基本思想是结构受白噪声激励以及结构小阻尼的前提下,通过PSD矩阵的秩来识别结构模态以及判断结构中是否存在密集模态。但结构受到非白噪声激励的情况下,由于非白噪声激励的功率谱不是平谱,在其激励主频处存在峰值。此时,结构响应PSD函数在激励主频处也会出现峰值,响应PSD矩阵的秩在激励主频处将由不相关非白激励源的个数决定。因此,FDD方法在非白噪声激励下存在的问题可归纳如下:
(1)当结构单个点受到非白环境激励或结构多个点受到相关的非白环境激励时,响应PSD矩阵在非白激励主频处的秩为1,此时FDD方法会将非白激励主频误识别为结构模态频率。

(3)若结构受到谐波激励作用,当采用Welch方法估计响应PSD矩阵时,由于各个时间段内的谐波响应总是相关,因此得到的PSD矩阵在谐波激励频率处的秩总为1[19],此时FDD方法会将谐波频率误识别为结构模态频率。
3 融合多工况功率谱密度函数的OMA方法
第2章中,FDD方法假设结构所受激励为白噪声随机激励,当结构受到非白激励时,FDD方法会将激励主频错误识别为结构模态频率。
由式可知,当输出通道数No与分割窗口个数Nw足够大时,响应PSD矩阵Sxx(ω)秩等于不相关激励源数目Nμ,且在模态频率处等于此频率处结构模态阶数nm。根据该性质,本文提出一种融合多个激励工况下响应PSD矩阵的OMA方法,解决第2.2节中指出的传统FDD方法存在的不足。所提方法核心思想是:通过不同激励工况下的响应PSD矩阵构建增广PSD矩阵,随后进行奇异值分解,在第1阶奇异值峰值处比较单工况响应PSD矩阵的秩与增广PSD矩阵的秩,当秩相同时表明该峰值由结构模态引起,否则由非白激励引起,同时密集模态可由PSD矩阵秩的大小确定。
选择多个不相关激励工况下的响应和判断奇异值峰值处PSD矩阵的秩是所提方法应用的关键。第3.1节介绍所提方法的原理及流程,第3.2节重点讨论如何定量判断所选激励工况的不相关性,第3.3节给出确定PSD矩阵秩的定量准则。
3.1 方法原理及流程
由式可知,响应PSD矩阵在结构模态频率处与相应的模态振型向量成比例。由于结构模态参数属于结构固有属性,因此在任何激励条件下响应PSD矩阵均具有该性质。然而,在非白环境激励的主频处,响应PSD矩阵的秩将会随激励作用方式的改变而改变。基于上述特性,本文提出融合多工况响应PSD矩阵的FDD方法。
不同于传统FDD方法仅利用单一激励工况下的响应PSD矩阵,本文方法首先将不同激励工况下估计的响应PSD矩阵组合为如下增广PSD矩阵
(17)

(1)在模态频率处等于此频率处结构模态阶数nm,因此与单一激励工况下PSD矩阵Sxx(ω)的秩相同;
(2)在其他频率处,等于所有激励工况下不相关激励源数目之和,因此与Sxx(ω)的秩不同。
本文所提方法主要包括以下五个步骤:
步骤1不同激励工况下响应PSD矩阵估计
测量Nc(Nc≥2)个不同激励工况下的结构振动信号,并利用Welch方法估计各工况下的响应PSD矩阵。为定量区分不同环境激励工况,本文利用工况区分准则(load difference indicator,LDI)[20]对环境激励工况进行区分,LDI准则的原理及表达式见第3.2节。
步骤2单激励工况响应PSD矩阵SVD分解
步骤3多激励工况响应PSD矩阵SVD分解

步骤4非白环境激励主频识别
步骤5结构密集模态识别
所提方法完整流程图如图 2所示,其中LDI与DSSV准则分别见第3.2节和3.3节。
3.2 不同激励工况的区分准则
本文所提方法需要至少两个不同环境激励工况,在选择激励工况时要保证不同激励工况之间有足够的区分度,因此定量判断两个激励工况的区分度对于所提方法十分关键。
从响应PSD矩阵出发,若两个激励工况相似度较高,则其响应PSD函数图像在整个频带内几乎重合;反之,若两个激励工况的激励作用方式相差较大,响应PSD函数也将存在较大差异。鉴于此,本文采用文献[20]中的归一化PSD相对偏差作为LDI,其公式如下
(18)

3.3 响应PSD矩阵秩的判断准则
融合多激励工况响应PSD矩阵的FDD方法,核心是检测单个激励工况与多个激励工况下响应PSD矩阵秩的变化,故准确地识别出响应PSD矩阵的秩是保证该方法精度的关键。传统FDD方法通过人为挑选奇异值峰值确定响应PSD矩阵的秩,属于定性方法。已有部分文献提出了判断矩阵秩的定量准则,如奇异值熵增准则[21]、奇异值的均值准则[22]等。其中,Zhao等[23]提出的DSSV的概念,它由奇异值序列的正向差分组成,可以描述复杂信号的奇异值突变状态;在信号分解、模态阶数选择等应用中表现优异,因此本文采用DSSV作为PSD矩阵秩的确定准则。DSSV定义为奇异值的向后差分,其表达式为
(19)
式中,θi为第i阶奇异值。若矩阵的秩等于m,则奇异值θm远大于θm+1,因此DSSV由θm+1开始趋近于0,根据该特性即可通过DSSV曲线确定响应PSD矩阵的秩。
4 桁架结构仿真算例
本章采用文献[24]中的桁架结构模型验证所提方法的有效性。桁架结构模型如图3所示,弹性模量为6.98×1010Pa,材料密度为2 770 kg/m3,并在节点1、节点2、节点3、节点4上加入454 kg的额外集中质量,Ai为第i根杆件横截面积,其阻尼矩阵与质量矩阵成正比且第一模态阻尼等于1%,表1给出桁架结构真实模态频率和阻尼比。由表1可知,桁架结构模态3和模态4相隔较近,模态5和模态6几乎重合,属于密集模态。

表1 桁架结构的真实模态频率与阻尼比
本算例中采用三种类型的激励(即白噪声、谐波激励和非白噪声激励),其中谐波激励的频率为12 Hz;非白噪声激励由白噪声经过单自由度系统过滤得到,滤波函数为
(20)

桁架结构的位移响应使用方法进行计算,时间步长为1/1 024 s,总时长320 s。随后对响应进行128 Hz重采样,在重采样响应中加入不相关高斯序列模拟传感器测量噪声,信噪比为20 dB。
4.1 激励工况设置
为验证提出方法的有效性,本文对各工况中白噪声、非白噪声和谐波激励的工况选择如下。
工况Ⅰ:节点1的x、y方向同时作用非白噪声激励与谐波激励,节点2、节点3、节点4的x、y方向同时作用高斯白噪声激励。所有非白噪声激励与高斯白噪声激励均不相关,且沿节点1的x和y方向的两个谐波激励之间的相位差是随机的。
工况Ⅱ:节点1的x、y方向同时作用非白噪声激励与谐波激励,且沿节点1的x和y方向的激励完全相关,节点2、节点3、节点4的x、y方向同时作用不相关高斯白噪声激励。
工况Ⅲ:在节点1、节点2、节点3的x、y方向同时作用非白噪声和谐波激励,且沿x、y方向激励完全相关。
工况Ⅳ:在节点3的x、y方向同时作用非白噪声和谐波激励,在节点1、节点2、节点4的x、y方向作用白噪声激励,且激励均不相关。
在上述四个工况中,工况Ⅰ和工况Ⅱ通过对比验证式(16)中响应PSD矩阵秩的结论,同时说明经典FDD方法在非白环境激励下的局限性。设置工况Ⅲ和工况Ⅳ的目的是将两个工况分别与工况Ⅰ进行对比,通过式(18)选出区分度较高的两个工况,用于验证所提方法的有效性。
4.2 仿真结果
4.2.1 经典FDD方法辨识结果
使用Welch方法对响应PSD计算,设置Hanning窗长度为2 048,邻近的窗采用50%重叠,则响应PSD函数通过39个窗平均估计。通过计算得到桁架结构位移响应的PSD矩阵,其对角线元素如图4所示。图4中曲线表示各响应自由度的PSD函数,圆圈表示此处峰值由非白激励引起,方块表示此处包含结构密集模态,竖直的点划线表示结构模态频率位置。从图4中可清晰地看出,在谐波频率12 Hz和有色噪声激励主频40 Hz处均存在峰值;此外,从PSD曲线中难以区分结构密集模态,尤其在模态5和模态6处,两阶模态PSD曲线几乎重合。
图5和图6分别给出了激励工况Ⅰ和工况Ⅱ下响应PSD矩阵的奇异值曲线,图中曲线为各阶奇异值曲线,数值表示该阶奇异值曲线峰值频率,单位为Hz,其余图例含义与图3相同。在图5中,第1阶和第2阶奇异值在非白噪声激励主频40 Hz处均出现峰值,而图6中仅第1阶奇异值在40Hz处出现峰值,原因是工况Ⅰ下作用的两个非白噪声激励不相关,而工况Ⅱ下作用的两个非白噪声激励完全相关;在谐波激励频率12 Hz处,均只有第1阶奇异值出现峰值,说明响应PSD矩阵在谐波激励处的秩总为1。同时,通过图5,经典FDD方法会将40 Hz识别为结构的密集模态,且将12 Hz识别为结构模态;图6中,当单工况Ⅱ激励时,经典FDD方法将12 Hz及40 Hz处识别为结构模态,得到明显错误的结果。
上述结果验证了式给出的响应PSD矩阵秩的结论,同时表明传统FDD方法在非白环境激励下的局限性。
4.2.2 所提方法辨识结果
(1)不同激励工况选择
图7分别对比了激励工况Ⅰ和工况Ⅲ,激励工况Ⅰ和工况Ⅳ下4号节点y方向位移响应的PSD函数曲线。可以看出,工况Ⅰ和工况Ⅲ之间的差异明显大于工况Ⅰ和工况Ⅳ之间的差异。为定量比较两个工况之间的差异,在每个峰值附近取宽度为Δω=4 Hz的窄带,利用式计算LDI指标,结果如图8所示。工况Ⅰ与工况Ⅲ之间LDI最小值为0.305,出现在频率为40 Hz处,工况Ⅰ与工况Ⅳ之间LDI最小值为0.261,出现在频率为48.56 Hz处。区分不同激励的LDI阈值为15%,则激励工况Ⅰ与工况Ⅲ,激励工况Ⅰ与工况Ⅳ均可用于本次验证试验,但由图8可知,除第1阶频率外,工况Ⅰ与工况Ⅲ的LDI值均大于工况Ⅰ与工况Ⅳ,因此本章采用区分度更高的工况Ⅰ与工况Ⅲ对所提方法进行验证。
(2)单工况PSD矩阵与增广PSD矩阵的秩对比
图9给出了激励工况Ⅲ下响应PSD矩阵的奇异值曲线,可以看出,响应PSD矩阵前3阶奇异值在非白噪声激励主频40 Hz处均出现峰值,说明在激励工况Ⅲ中三个不相关的非白激励下,响应PSD矩阵的秩为3;在谐波激励频率12 Hz处,只有第1阶奇异值出现峰值,进一步说明响应PSD矩阵在谐波激励处的秩总为1。
图10分别给出了单激励工况Ⅰ和工况Ⅲ以及融合工况下频率为12 Hz和40 Hz处的DSSV曲线。在12 Hz时,图5中第1阶奇异值出现峰值,图11中第1阶和第2阶奇异值出现峰值,在图10中使用一个工况激励时,第2阶DSSV值接近于零,融合两个工况时,第2阶DSSV不为零,第3阶DSSV值接近于零,可得在12 Hz处,单个工况激励时PSD矩阵的秩为1,融合两个工况激励时PSD矩阵的秩为2。按照同样的思路,在40 Hz处,只有工况Ⅰ激励时PSD矩阵的秩为2,融合两个工况同时激励时PSD矩阵的秩增加为4。
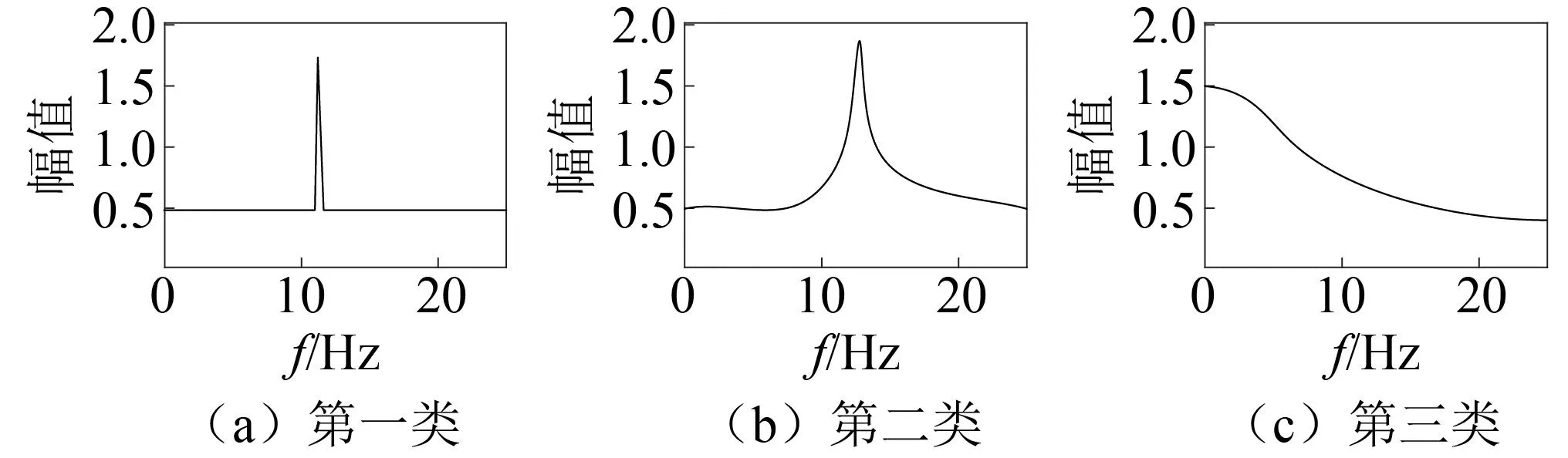
图1 三类典型非白噪声激励功率谱密度示意图
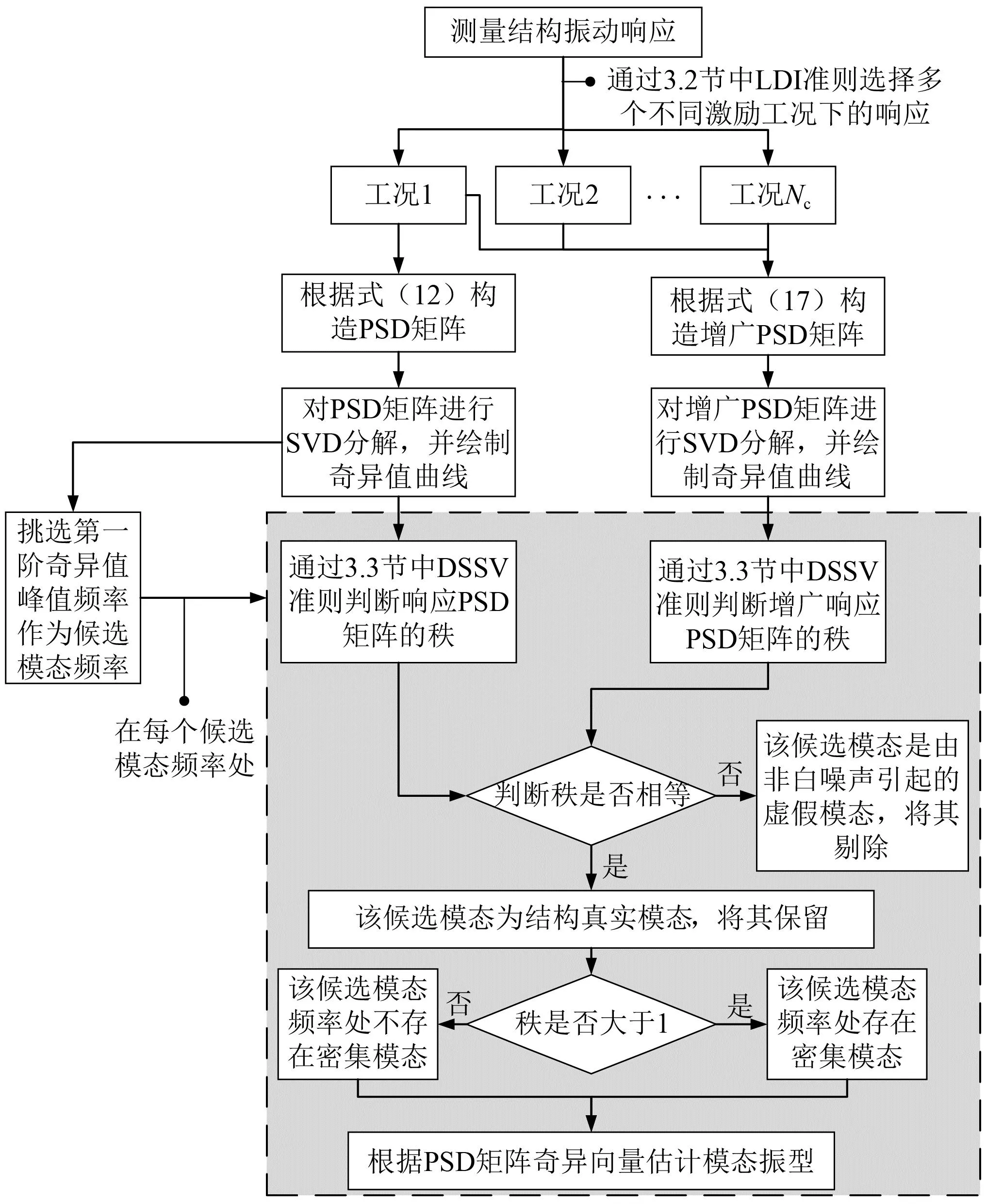
图2 所提方法流程图
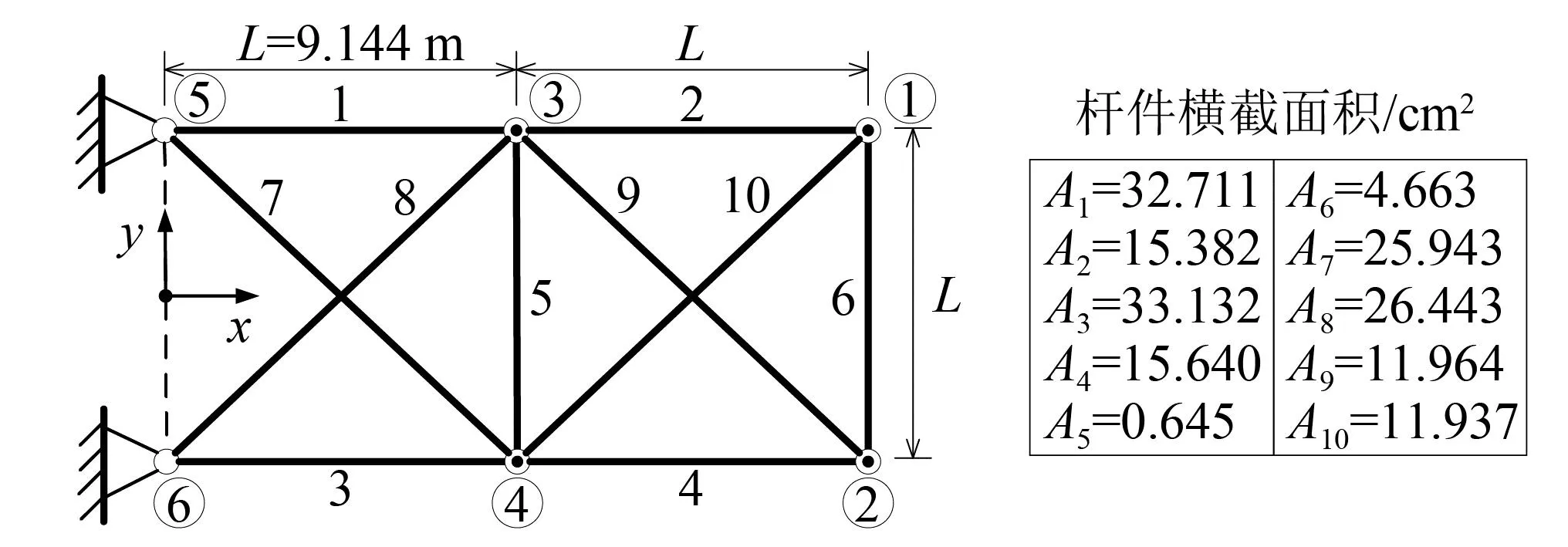
图3 桁架结构图[24]
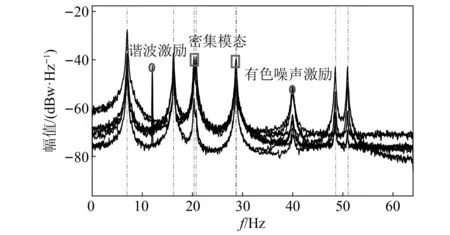
图4 仅工况Ⅰ激励桁架自功率谱密度

图5 工况Ⅰ激励PSD矩阵奇异值
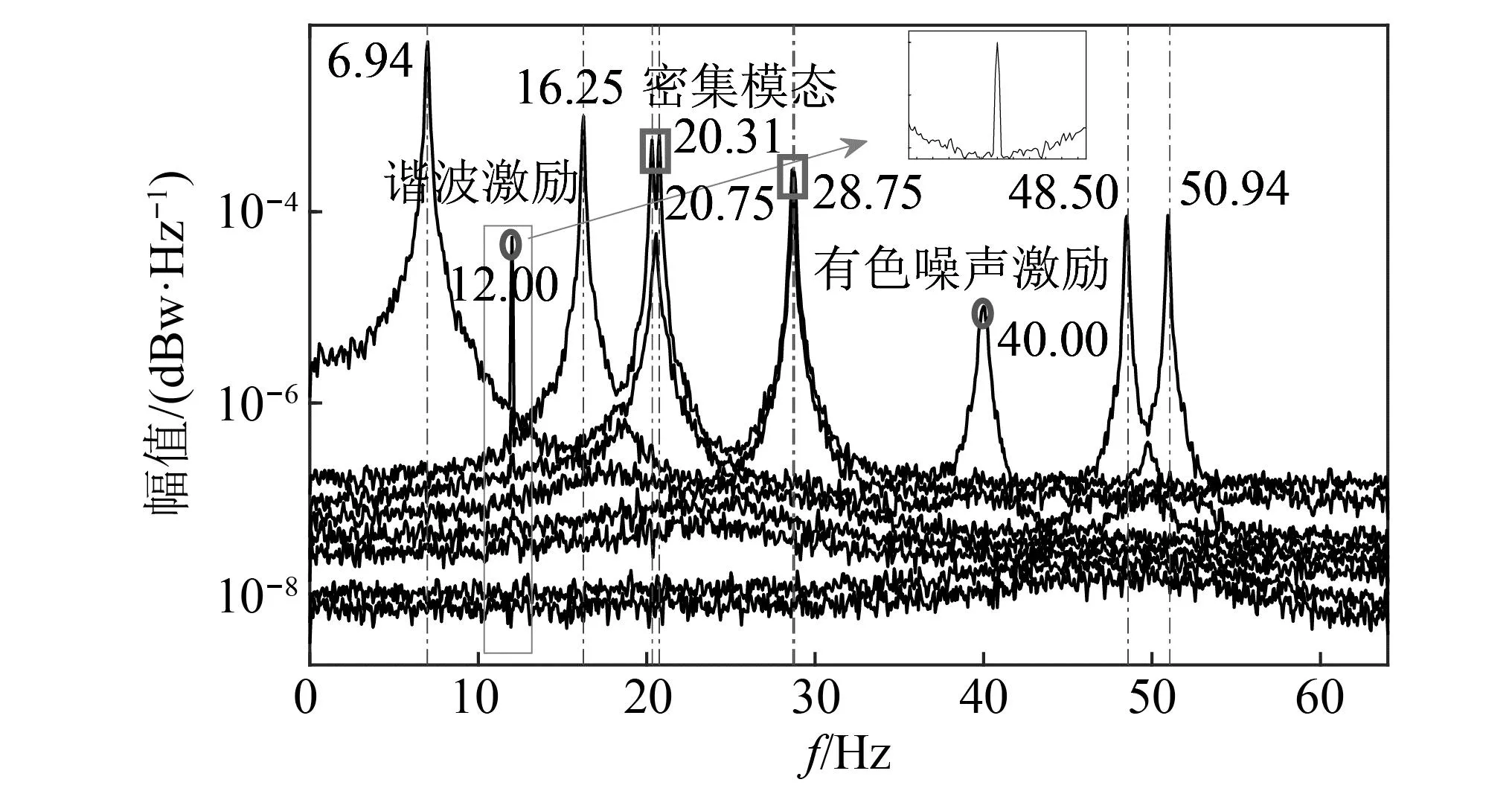
图6 工况Ⅱ激励PSD矩阵奇异值

图7 不同激励工况下的PSD函数
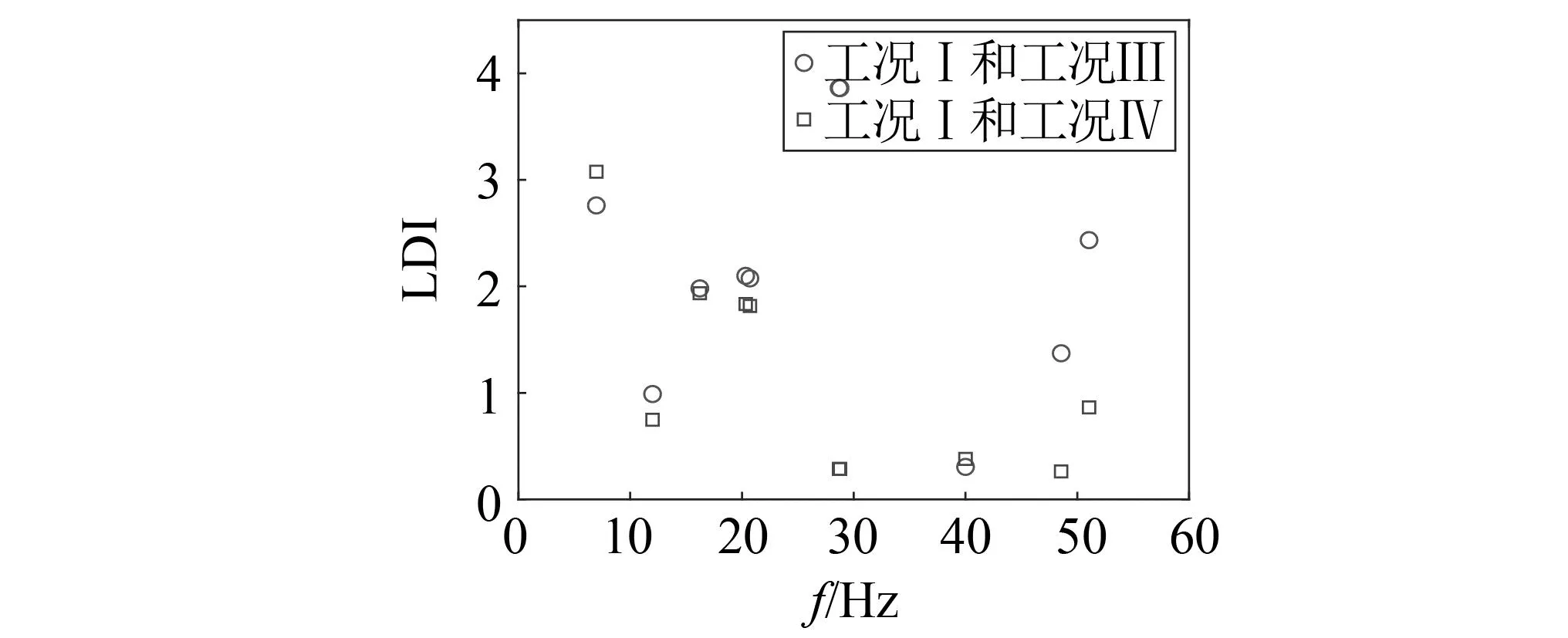
图8 不同激励工况组合下的工况区分准则
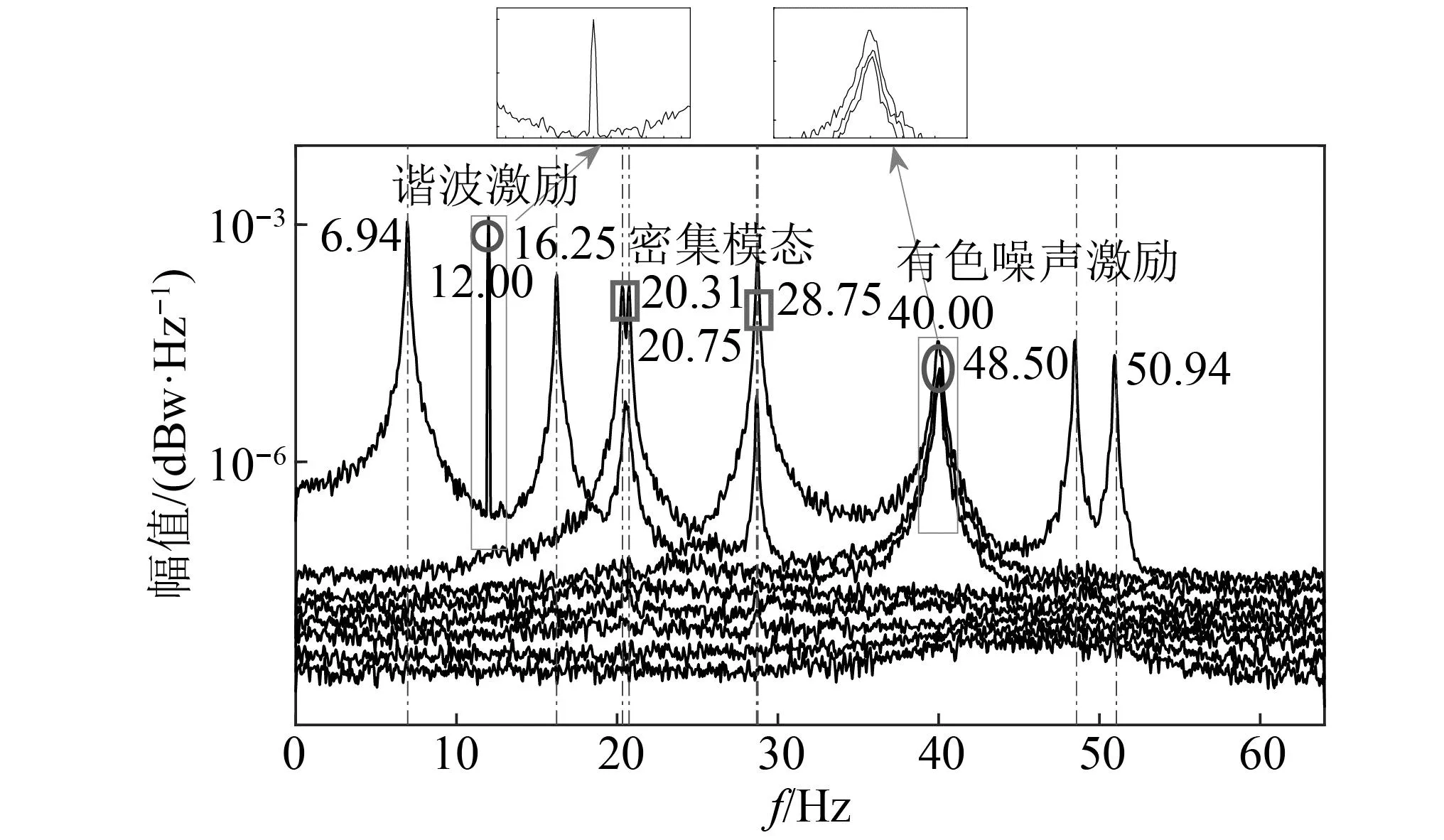
图9 工况Ⅲ激励PSD矩阵奇异值
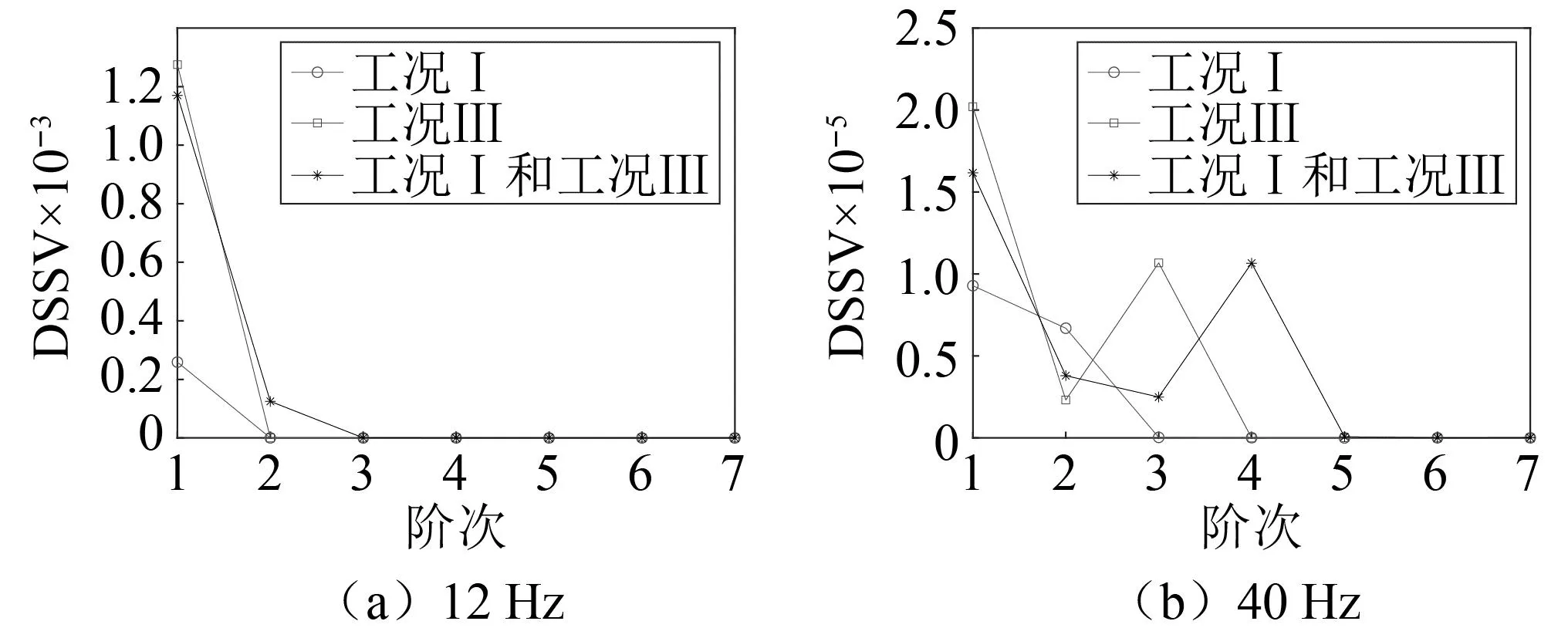
图10 各工况下奇异值计算得DSSV值
图11 工况Ⅰ与工况Ⅲ激励PSD矩阵奇异值
图5和图11中谐波频率12 Hz处和非白噪声激励主频40 Hz处奇异值曲线的峰值数发生改变,即PSD矩阵的秩发生了改变;在其他频率处奇异值曲线的峰值数相同,即PSD矩阵的秩在激励工况Ⅰ和融合激励工况Ⅰ、工况Ⅲ作用下保持一致,这表明12 Hz和40 Hz处的峰值是由非白激励引起的虚假模态。
上述结果验证了所提方法剔除虚假模态的有效性;剔除虚假模态后,观察图5中候选模态频率,在频率为28.75 Hz处PSD矩阵奇异值曲线在第1阶和第2阶均出现峰值,说明响应PSD矩阵在频率为28.75 Hz处的秩为2,结构在这个频率点处存在密集模态。结构模态与非白激励主频鉴别结果如表2所示。该桁架结构的第3阶和第4阶模态频率相差0.38 Hz,在PSD矩阵奇异值曲线中可清楚看到两个相隔很近的峰值,而第5和第6阶模态频率相差0.1 Hz,对应的两个峰值在PSD曲线上完全融合在一起,因此在辨识出的第5和第6阶模态频率均为28.75 Hz。
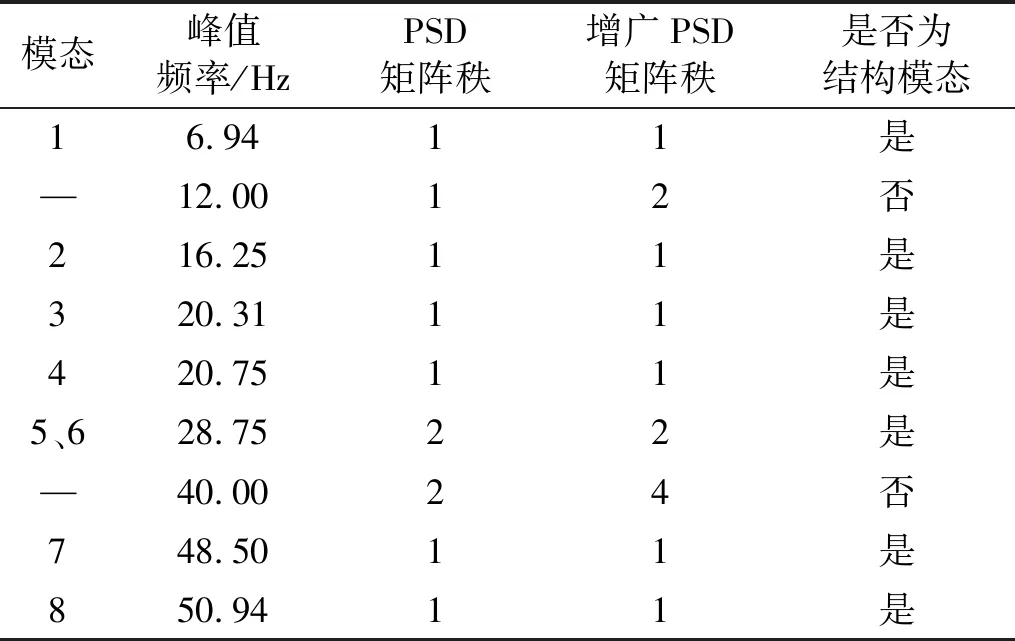
表2 结构模态与非白激励主频鉴别结果
所提方法最终辨识出的桁架结构模态频率及百分比误差如表3所示,表中正值误差表示辨识值大于理论值,负值表示辨识值小于理论值。综合表2和表3可以看出,本文所提方法可有效剔除谐波激励和有色噪声激励导致的虚假模态,辨识出的结构真实模态频率与理论值非常接近。

表3 桁架结构的理论值与辨识值
5 实例验证:广州塔
本文采用中国广州新电视塔[25]实例对所提方法进行验证。数据采集时在主塔的八个平台上总共部署20个单轴加速度计,其中加速度计和采集系统的部署位置、方向和标签如图12所示;在第四级和第八级布置了四个单轴加速度计,其中两个用于测量椭圆形内部结构短轴方向的加速度信号,另外两个用于测量长轴方向的加速度信号;在其他六个平台上,各布置两个单轴加速度计,一个用于测量椭圆形内部结构的短轴方向的加速度信号,另一个用于长轴方向的加速度信号,关于数据采集系统及位置部署可见参考文献[26-28]。

图12 广州塔上测量系统分布
数据测量时间段为2010-01-19 18 ∶00—2010-01-20 18 ∶00,所有单轴加速计测得的加速度响应均以4 Hz的频率重采样,然后用于识别主塔的模态参数。使用Welch方法对响应的PSD矩阵进行计算时,设置Hanning窗长度为1 024,窗与窗之间重叠率为50%。图13中给出2010-01-20 15 ∶00—16 ∶00时间段内响应PSD函数求和图像。
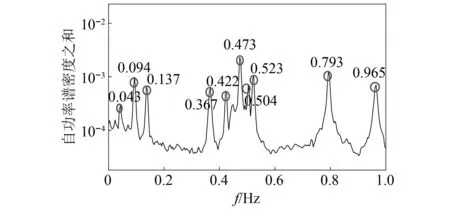
图13 2010-01-20 15 ∶00—16 ∶00自功率谱密度之和
在1 Hz频率内对广州塔的结构模态进行讨论分析,图13中共有10阶模态,其中第2~第9阶模态为文献[29-31]中识别的结构模态,第1阶模态为环境非白噪声激励引起的虚假模态,本章将用新提出的方法剔除0.043 Hz处的虚假模态。
如图14所示,仅用2010-01-20 17 ∶00—18 ∶00时间段测量的数据进行计算,在0.043 Hz处图像出现三个峰值,而其他频率处仅出现一个峰值,从图17中DSSV可以得出该时间段内,在频率为0.043 Hz处PSD矩阵的秩为3。

图14 2010-01-20 17 ∶00—18 ∶00测量PSD矩阵奇异值
为定量比较两个时间段测量数据之间的差异,在每个峰值附近取宽度为Hz的窄带,利用式计算LDI指标,如图15所示,对比时间段2010-01-20 16 ∶00—17 ∶00与2010-01-20 17 ∶00—18 ∶00的测量数据,可观察到频率为0.043 Hz处LDI的值为3.84,大于区分不同信号的阈值15%,说明作用于结构的两不同时间段内环境激励在0.043 Hz处有足够的区分度,可用这两时间段内测量的数据进行验证试验。
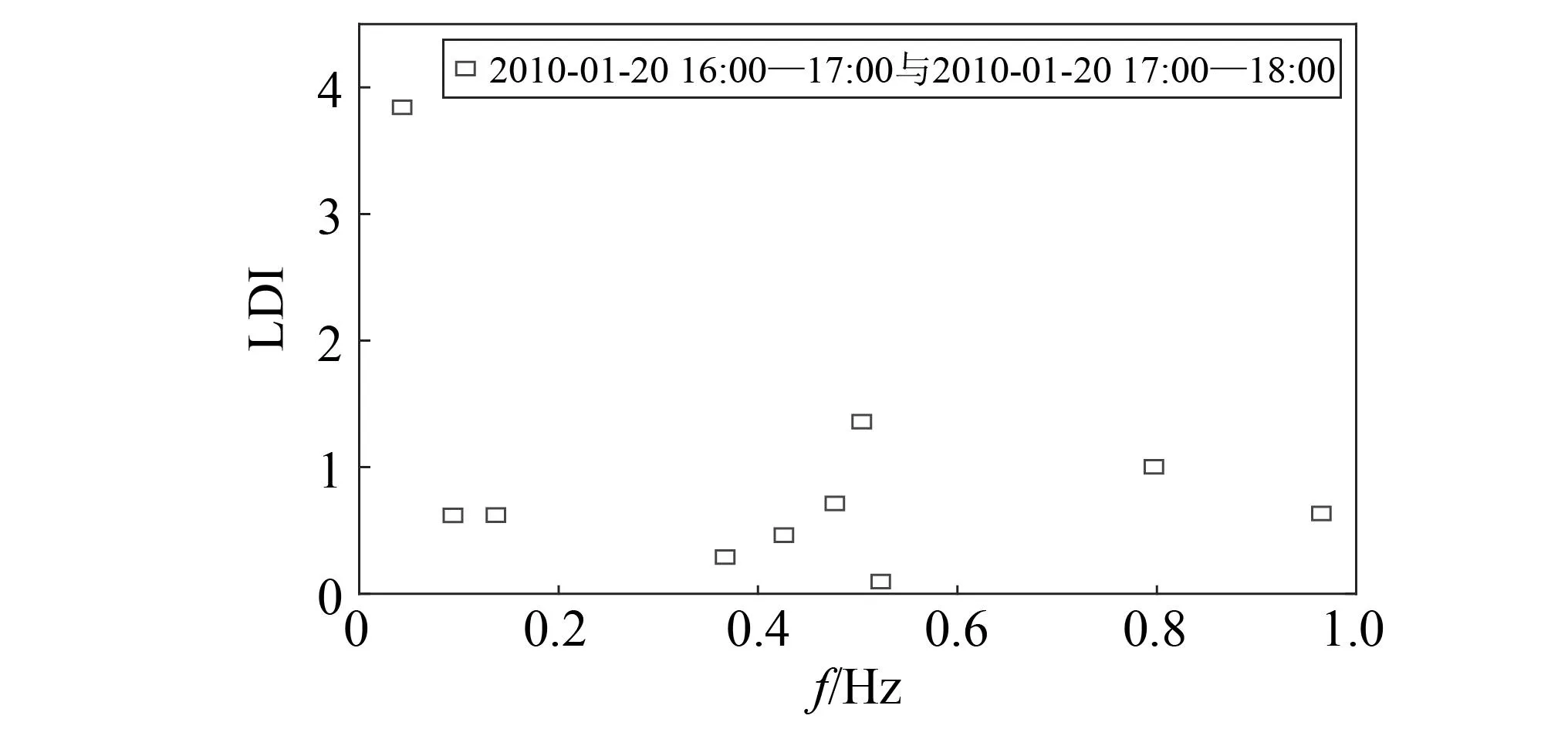
图15 基于归一化激励辨识值
如图16所示,将两个时间段内测量的数据融合并进行计算,可观察到响应PSD矩阵的奇异值曲线在0.043 Hz处出现四个峰值,且结合图17中DSSV值可得,环境激励响应PSD矩阵的秩在该频率处为4,而在其他频率处均只有第一阶奇异值出现峰值,且对比图14奇异值峰值数并未发生改变;通过对比单个时间段和融合两个时间段响应PSD矩阵曲线奇异值峰值阶数的改变以及对比图17(a)中两条曲线的DSSV值,说明在频率为0.043 Hz处,环境激励响应PSD矩阵的秩发生改变,而在其他频率处并没有发生改变,证明频率为0.043 Hz处模态为环境非白噪声激励产生的虚假模态。
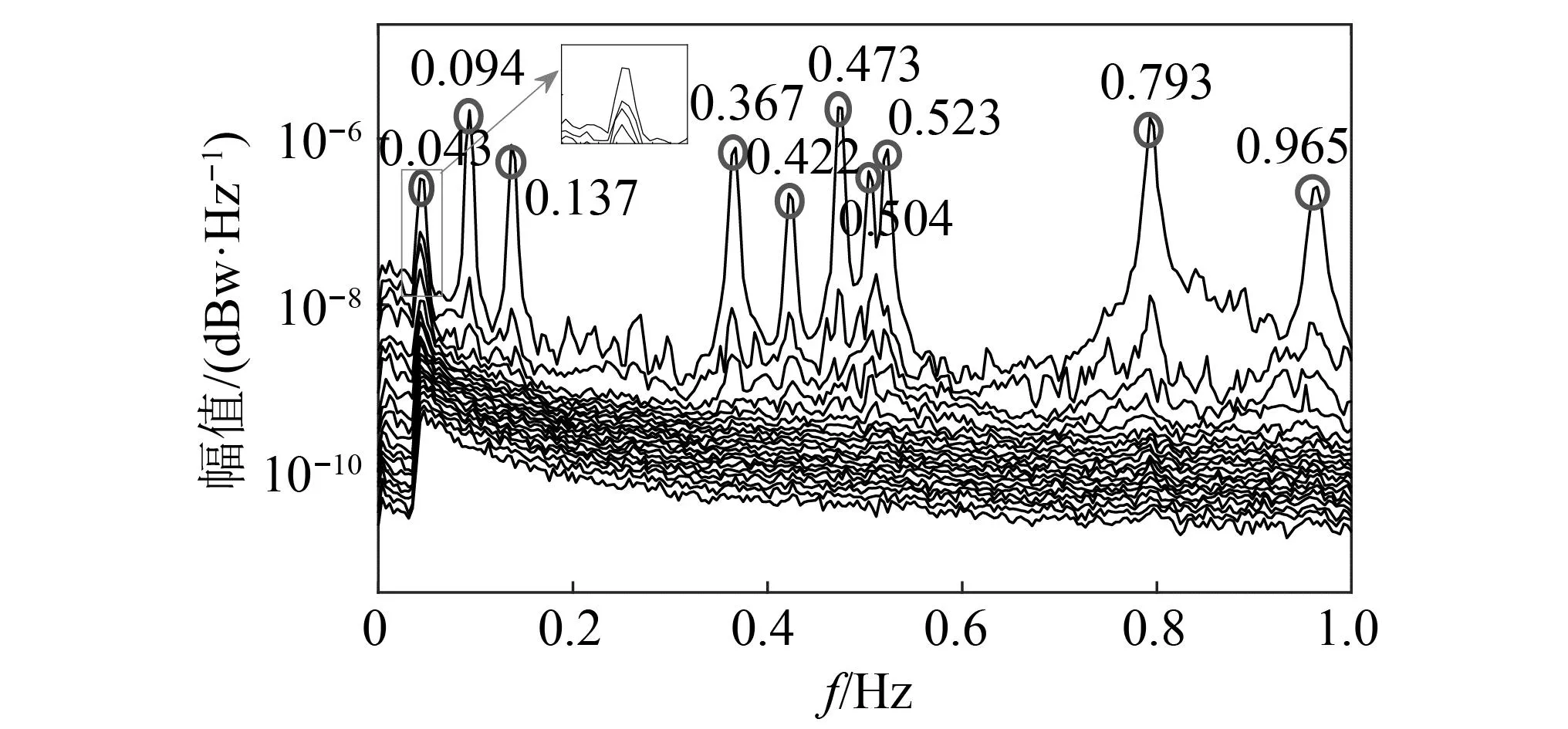
图16 合并两时间段数据PSD矩阵奇异值

图17 不同时间段下奇异值计算得DSSV值
图17给出不同时间段下奇异值计算得DSSV值,其中图17(a)为频率0.043 Hz处单个时间段与融合两个时间段DSSV的对比图,观察可得:取单个时间段时第3阶的DSSV不为零,而第4阶接近于零,可判断此时PSD矩阵的秩为3;融合两个时间段时,第5阶DSSV值接近于零,且前4阶远大于第五阶,可判断合并后响应PSD矩阵的秩为4;图17(b)为频率为0.797 Hz的模态频率处对比图,可观察到两条曲线基本重合,且只有第1阶DSSV有值,说明在模态频率处响应PSD矩阵的秩不会随着外界激励的改变而发生改变,且为1。
本文所提方法最终辨识的广州塔模态频率与文献[29-30]的对比结果如表4所示。由表4可知,所提方法可有效剔除非白环境激励引起的虚假模态,辨识出的结构真实模态频率与文献中的结果非常接近,证明了所提方法在实际应用中的有效性。

表4 各方法识别广州塔模态频率
6 结 论
针对传统FDD模态识别方法不能适用于非白环境激励的问题,本文指出响应PSD矩阵的秩是FDD方法性能的决定性因素,并提出了一种融合多个激励工况下响应PSD矩阵的模态识别方法。
本文采用桁架结构数值算例和广州塔工程数据集验证了所提方法的有效性,并将所提方法和现有FDD方法进行对比。通过理论和算例分析,本文主要结论如下:
(1)响应PSD矩阵的秩是决定FDD方法性能的决定性因素,也是FDD方法不适用于非白环境激励的根本原因。
(2)在非白噪声激励下,本文所提方法可有效剔除由谐波激励和非白噪声激励引起的虚假模态。
(3)本文所提方法需两个以上不同激励工况,且需确定响应PSD矩阵的秩。本文采用LDI准则从结构响应出发定量描述激励工况的差异性,并利用DSSV准则定量确定响应PSD矩阵的秩,便于方法应用。
(4)一般情况下,LDI准则大于15%即可认为两个激励工况是不同的;为保证识别精度和DSSV准则的有效性,本文所提方法适用于结构响应信噪比大于20 dB的情境。
