永磁同步电机改进无模型超螺旋滑模控制*
2024-03-01龚事引刘捃锓于惠钧周湘杰
龚事引,李 丹,刘捃锓,于惠钧,黄 刚,周湘杰
(1.湖南铁路科技职业技术学院,株洲 412000;2.湖南省高铁运行安全保障工程技术研究中心,株洲 412000;3.湖南铁道职业技术学院,株洲 412000;4.湖南工业大学电气与信息工程学院,株洲 412007;5.湖南工业大学轨道交通学院,株洲 412000)
0 引言
永磁同步电机(permanent magnet synchronous motor,PMSM)因体积小但功率密度高等众多优点,在交通运输、高精度医疗设备等领域得到广泛应用[1]。但整体电机控制系统易受机械设备老化以及恶劣工作环境的影响,导致稳定性降低[2]。传统PI控制容易积分饱和,在参数摄动和外部干扰等不确定因素对控制系统带来的影响时难以有效抑制,不能满足高精度控制性能的要求[3]。滑模控制(sliding mode control,SMC)[4]因其暂态性能好、鲁棒性强等优点得到广泛应用。但传统SMC方法存在抖振现象,可能造成系统误差较大[5]。
TRAN等[6]提出一种非奇异终端滑模控制策略,使得终端滑模奇异性问题得到解决,提高了系统的响应速度,但系统的跟踪性能下降。与文献[6]相比,康尔良等[7]将改进型非奇异终端滑模和扰动观测器结合设计转速环控制器,解决奇异性问题的同时,实现了转速的精确跟踪。李祥飞等[8]将新型趋近律与非奇异快速终端滑模结合设计电机外环速度控制器,并结合改进型容积卡尔曼实现无传感器控制。LI等[9]提出三阶超螺旋控制律,将控制律与新型扰动观测器和非奇异快速终端滑模结合设计控制器,引入时变扰动验证该算法有效提高系统的抗扰动性能,但控制器参数过多,算法复杂。
综上所述,本文针对PMSM驱动控制系统因参数摄动和外部扰动导致运行稳定性下降等问题,提出一种基于超螺旋扩展滑模扰动观测器(super-twisting extended sliding mode disturbance observer,STESMDO)的永磁同步电机改进无模型超螺旋非奇异快速终端滑模控制算法(improved model-free super-twisting nonsingular fast terminal sliding mode control,IMFNFTSMC)。提出新型超局部模型,将二阶超螺旋与NFTSM结合设计转速环控制器以改善转速跟踪性能;设计STESMDO对系统扰动进行的估计并反馈控制器,以此实现复杂工况下PMSM容错控制;最后通过仿真和RT-LAB实验进行验证。
1 永磁同步电机数学模型
永磁同步电机在理想状态下运行[10],其数学方程为:
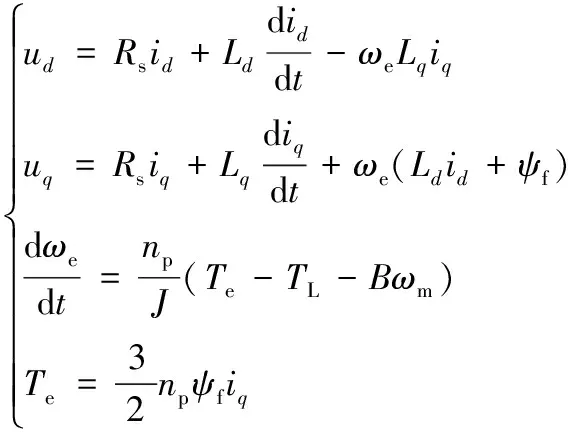
(1)
式中:id为定子d轴电流分量,iq为定子q轴电流分量,ud为定子d轴电压分量,uq为定子q轴电压分量,Ld为定子绕组d轴电感,Lq为定子绕组q轴电感,ωe为电角速度,B为阻尼系数,Te为电磁转矩,J为转动惯量,TL为负载转矩,ωm为机械角速度,ψf为永磁体磁链,Rs为定子电阻,np为极对数。
考虑SPMSM在复杂工况下运行影响系统稳定性,可进一步得到SPMSM数学模型为[10]:

(2)
式中:Δud为复杂工况下d轴电压扰动量,Δuq为复杂工况下q轴电压扰动量,ΔTe为复杂工况下输出电磁转矩的扰动量,ΔPn为转动惯量J和阻尼系数B变化引起的扰动量。
联立式(1)和式(2)可得:
(3)
2 改进无模型超螺旋非奇异快速终端滑模控制(IMFNFTSMC)
为保证SPMSM在复杂工况下仍具有高性能控制,本节先建立SPMSM转速环新型超局部模型;设计二阶超螺旋控制律与NFTSM结合,提出了IMFNFTSM控制策略。
2.1 SPMSM转速环新型超局部模型
一阶非线性超局部模型可表示为[11]:

(4)
式中:x∈Κ,λ1∈Κ为待设计的增益常数。
为建立新型超局部模型,将式(4)中g(x)表示为:
g(x)=λ2x+F
(5)
式中:λ2为待设计的系统状态增益,F为未知部分。
联立式(4)和式(5),可建立转速环新型超局部模型[11]:

(6)
为保证转速控制器在SPMSM参数摄动及时变扰动下仍有高控制性能,根据式(6),速度环新型超局部模型可以设计为:

(7)

2.2 SPMSM转速IMFNFTSM控制器设计
根据式(3)和式(7),设计式(8)为:
(8)
式中:uc为待设计的IMFNFTSM控制律。
定义状态误差:
(9)
联合式(7)~式(9):
(10)
根据式(10)设计e1、e2为:

(11)
针对式(11),设计NFTSM滑模面s为[12]:
(12)
式中:α>0,β>0,α1=g/h,β1=p/q,g、h、p、q均为待设计的正奇数,1<β1<2,α1>β1。
对式(12)求导可得:
(13)
当s=0时,式(12)可写为:

(14)
式中:n=-(1/β)1/β1,n<0。
为使控制系统的状态变量能够进入滑动模态,设计二阶超螺旋控制律为[13]:
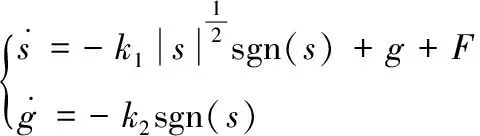
(15)
式中:k1>0,k2>0,F为系统扰动。
定理1:对于转速误差式(10),选择滑模面式(12),三阶超螺旋控制律式(15),设计如式(16)的IMFNFTSMC反馈控制律uc:
(16)
且式(15)满足式(17)条件,则状态误差e将有限时间收敛。
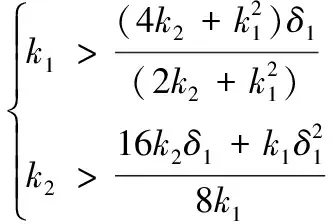
(17)
证明1:选择如下Lyapunov函数V:
(18)
对V求导可得:
(19)
由于1<β1<2、α1>β1,则可得:
(20)
(21)
式中:k、a为正整数,即2k、2a为正偶数,可得:
(22)
根据Lyapunov稳定性定理可知,该原点处于全局稳定状态。下一步证明二阶超螺旋控制律在滑模面上的稳定收敛。
证明2:选取类二次型正定Lyapunov函数:
(23)
式(23)可化简为:
V1=ζTPζ
(24)

对式(24)中的ζ求导:

(25)

对V1(x)求导可得:

(26)

(27)

联立式(26)和式(27)可得:
(28)

由Schur补的性质可得:
(29)
化简式(29)可得:
(30)
将式(30)化简为:
(31)


(32)
由式(32)可知,整个系统稳定且状态误差e将在有限时间内收敛。

(33)
二阶超螺旋(Super-Twisting)控制律ust为:

(34)
由式(33)和式(34)可得:
uc=ueq+ust
(35)

(36)
图1为基于STESMDO的IMFNFTSM控制框图。

图1 基于STESMDO的IMFNFTSMC控制框图
3 超螺旋扩展滑模扰动观测器(STESMDO)设计
通过设计二阶STA与ESMDO结合,改善传统SMO因高增益而导致系统严重抖振。STESMDO可以更加精准地估计实际系统未知扰动,并对IMFNFTSMC进行前馈补偿,提高系统的控制性能。
定义变量为:
(37)
式(29)重新定义为[14]:

(38)

联立式(7)和式(38)可得:

(39)

设计二阶超螺旋控制律:

(40)
由式(38)~式(40)可得STESMDO的控制律为:

(41)
根据二次型比较引理[14]可知,设计的uSTESMDO在满足式(42)时,系统收敛稳定。

(42)
(43)
(44)
此外,将sgn函数用双曲正切函数R(s)替换进一步减小控制器抖振,具体R(s)形式为:
(45)
图2为STESMDO框图。

图2 STESMDO结构框图
4 实验分析
在MATLAB平台搭建文中SPMSM系统模型,并将本文所提算法与PI和传统MFNFTSMC进行比较。SPMSM采用id=0控制策略,SPMSM参数如表1所示。图3为电机系统框图。
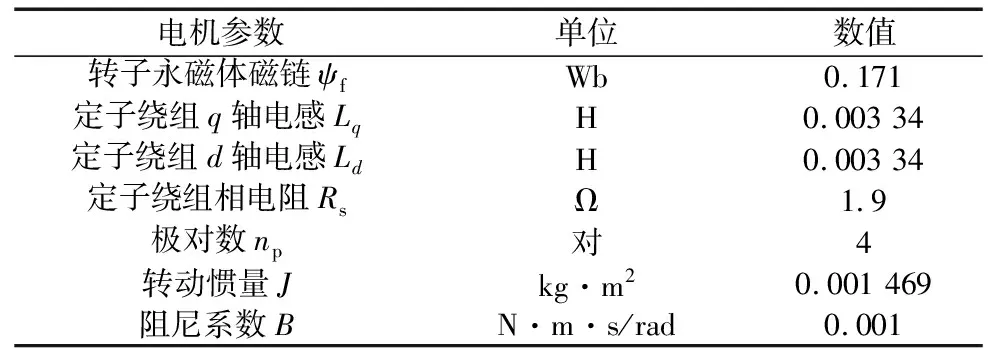
表1 SPMSM参数
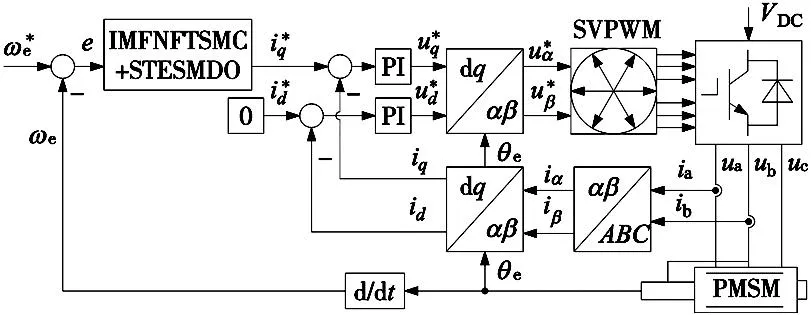
图3 SPMSM控制系统框图
4.1 仿真结果分析
设置电机机械参数发生摄动,并用时变负载模拟外部时变扰动。将IMFNFTSMC与PI和MFNFTSMC进行对比,检验IMFNFTSMC的抗扰动性能。具体实验工况如表2所示。

表2 参数摄动实验工况
图4为3种算法的仿真对比图。从图4a可以看出,在整个调速工况下,PI控制达到指定转速的时间较长,且存在明显超调,当SPMSM参数摄动和时变扰动发生时,导致PI控制的转速有较大的波动;相比于PI控制,基于传统SMO的MFNFTSMC算法在一定程度上提高了控制器的鲁棒性,但其仍无法满足高精度控制要求;所提出的基于STESMDO的IMFNFTSMC算法不仅使系统快速达到指定转速,而且进一步提高系统的鲁棒性与控制精度,减小参数摄动和外部时变扰动给转速带来的影响。

图4 3种算法仿真结果对比
在图4b转矩响应曲线中,PI和传统MFNFTSMC控制的转矩存在瞬时超调,且脉动较大;而IMFNFTSMC算法控制的转矩脉动能快速跟踪转矩参考值,脉动较小。当0.9 s系统加入时变扰动时,相比于其余两个算法,IMFNFTSMC波动小,收敛速度快。
图4c和图4d中,IMFNFTSMC的d-q轴电流脉动和电流响应速度远小于PI与MFNFTSMC;此外,由于电机参数摄动的影响,与IMFNFTSMC相比,PI和传统MFNFTSMC控制的q轴电流稳态值存在较大稳态误差。
图5为SMO与STESMDO转速跟踪和扰动估计的仿真对比。从图5a可以看出,STESMDO存在较小的转速跟踪误差。在电机参数摄动和时变扰动的暂态过程中,SMO的转速跟踪误差较大,整体跟踪效果差。在图5b中,STESMDO估计的系统扰动较为平滑,抖振较小。控制器的控制精度在一定程度上依赖于扰动观测器对扰动量的精确估计,因此在所提出的IMFNFTSMC算法中,系统控制性能最优。

图5 SMO/STESMDO观测结果对比
图6给出了电机稳态运行下3种算法的ia电流波形及其谐波畸变率THD值分析。受参数摄动和时变扰动的影响,PI控制的相电流存在较多的谐波分量,其THD为12.81%;由于MFNFTSMC算法中SMO对F的估计反馈,鲁棒性较好,能抑制一定的谐波,其THD降低至6.14%;而所提IMFNFTSMC算法中,因其NFTSM与二阶超螺旋结合设计控制器,并设计STESMDO对F更精准的估计反馈控制器,使SPMSM系统具有较强抗扰能力,能够更好的确保SPMSM在参数摄动及时变扰动下的安全平稳运行,因此电流THD得到进一步削弱,其THD降低至4.44%。

(a) PI
4.2 RT-LAB 实验分析
为了进一步验证该方法的正确性,本文采用RT-LAB平台对SPMSM进行硬件在环仿真(hardware-in-the-loop simulation,HILS)实验。图7为RT-LAB实验平台。DSP控制器采用TMS320F2812,通过OP5600构建了SPMSM和逆变器等电机系统其余组成部分。图8为PI/MFNFTSMC/IMFNFTSMC实验图。

图7 RT-LAB实验平台
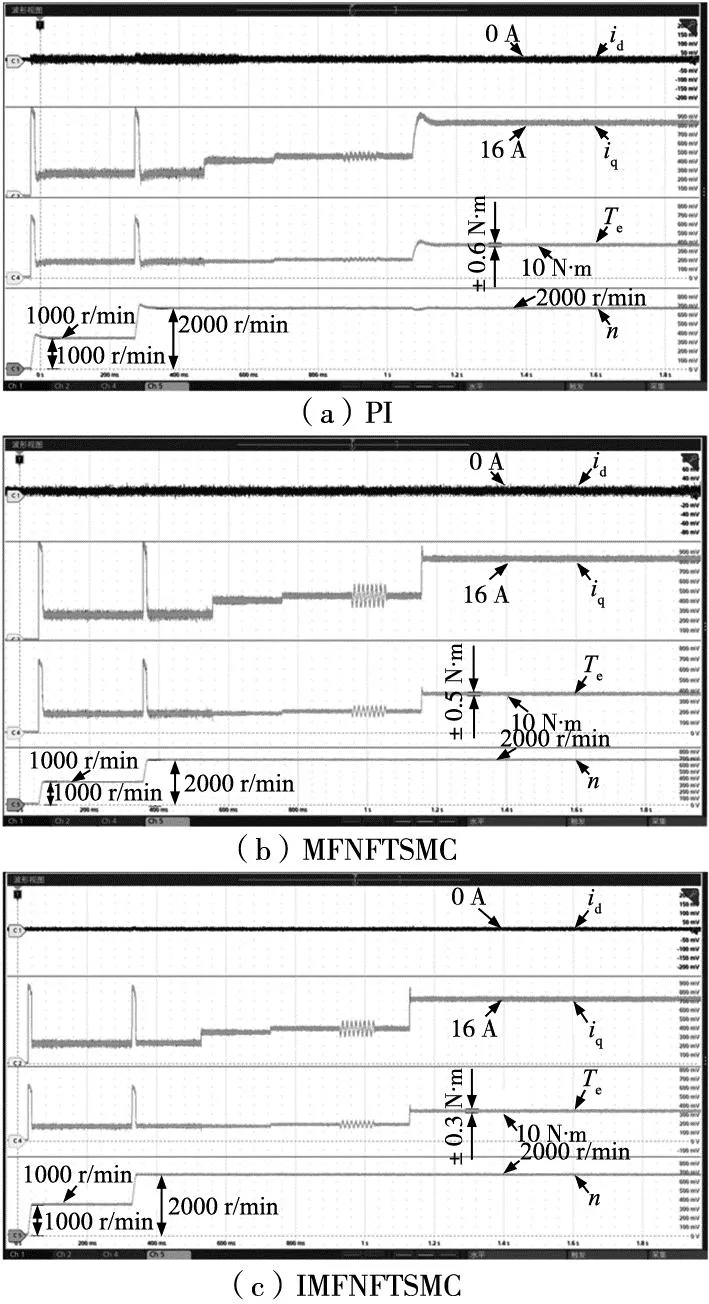
图8 RT-LAB实验图
从图8的实验对比中可知,3种算法的仿真结果与半实物实验结果基本相同。在参数摄动和时变扰动下,PI和基于SMO的MFNFTSMC控制的电机d-q轴电流脉动较大,转矩存在较大稳态误差,转速存在明显超调,无法准确跟踪设定值;而所提出的基于STESMDO的IMFNFTSMC控制的波形平稳,d-q轴电流和转矩脉动小,电流畸变率低。因此RT-LAB实验进一步验证了所提算法的可行性。表3为3种控制方法的综合性能比较。

表3 综合性能对比
5 结论
针对电机参数摄动和外部时变扰动引起SPMSM稳定性降低等问题,本文提出了一种基于STESMDO的IMFNFTSM控制算法。通过进行仿真与半实物实验,验证了所提出的方法的正确性和优越性,并由此得出以下结论:首先,针对SPMSM内部机械参数摄动和外部扰动进行分析,建立故障情况下电机数学模型;然后,提出新型超局部电机模型,与NFTSM和二阶超螺旋律ST结合,设计新型IMFNFTSM转速环控制器,加快系统收敛速度;将ST与ESMDO结合,设计STESMDO对系统未知扰动F准确估计并反馈控制器,提高系统的控制精度和鲁棒性。实验验证所提算法能有效减小电流和转矩脉动,提高转速控制精度,实现SPMSM在复杂工况下的容错控制。