无人作业环卫车自动加水的一种无线通信方案
2024-03-01唐仕安阳云施宇杰袁湘智
唐仕安 阳云 施宇杰 袁湘智
摘要:介绍了一种用于无人作业环卫车自动加水装置的无线通信方案。该方案基于工业用WIFI通信模块开发。结合实际可能的加水需求,环卫车具体可应用于单加水器应对单需加水车辆、多加水器应对多需加水车辆等场景。
关键词:无人作业环卫车;自动加水;WIFI模块;WLAN网络;TCP/UDP
中图分类号:U462 收稿日期:2023-11-15
DOI:1019999/jcnki1004-0226202401007
1 前言
随着无人驾驶技术的快速发展和商业化步伐的逼近,货运和客运被视为无人驾驶车辆规模化普及的关键领域。随着城市环卫需求日益增加,环卫行业招人难、环卫工年龄日趋老年化、环卫工作量不断增加的严峻形势,人力不足的问题愈发明显,无人驾驶环卫扫路机的出现和应用无疑成为了缓解城市环卫压力的一剂良方[1]。
2 自动加水的必要性及解决方案
传统环卫车加水需要人工操作,需要停车、下车、连接管路、加水等步骤,耗费时间和人力资源。无人环卫车在无人加水的情况下可以通过自动化技术实现,在工作过程中不需要人工干预,可以连续、高效地进行加水作业,智能化地满足车辆加水需求,提高工作效率。因此,利用车辆无线控制加水装置的开关水阀给车辆进行加水作业是十分必要的。
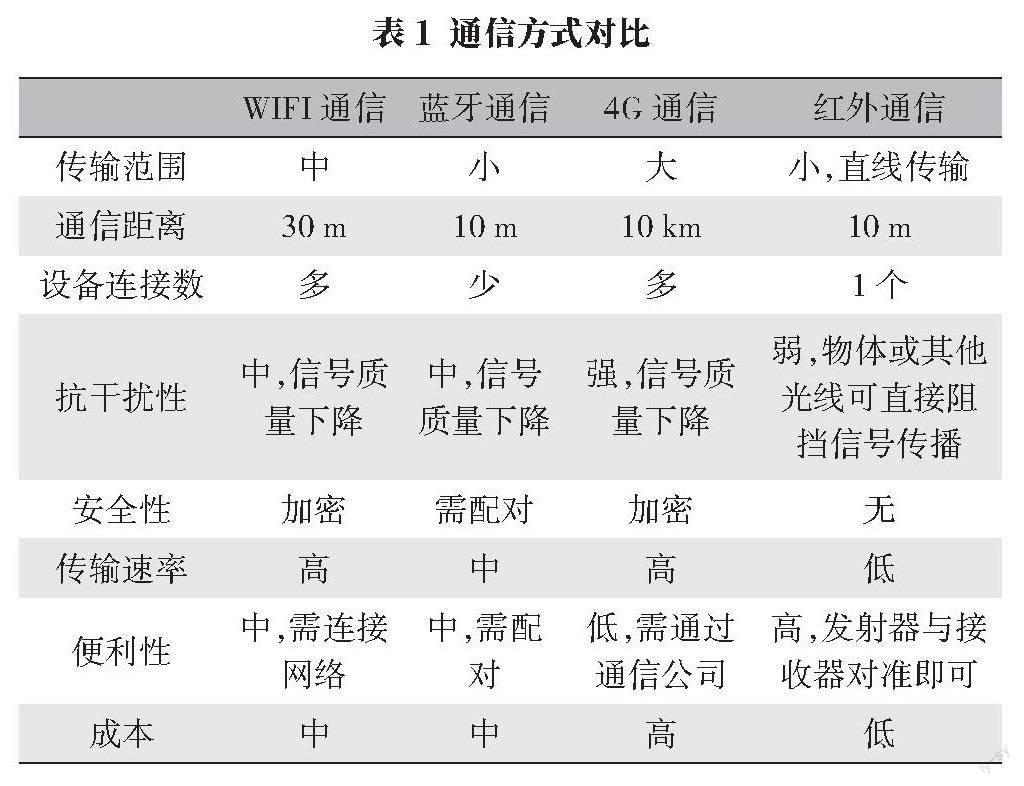
考虑到车辆近距离无线控制加水装置的需求,通过多方对比成本、通信距离、数据传输效率、稳定性等方面考虑(见表1),排除了红外、4G信号转发、蓝牙等数据传输方式,最终选用了WIFI网络传输车辆与加水装置的往返交互信息。
3 关键零部件介绍
本方案选用市面上销售的一款工业级CAN转 WIFI设备,该设备具备一路WLAN通道,两路CAN总线通道。传输时由设备一将所连接的CAN总线网络中的CAN总线报文转换为TCP/UDP报文并通过WLAN网络传输,由设备二接收后转换为CAN总线报文,并发送至设备二连接的CAN总线网络中,实现CAN与CAN网络中通过WLAN通道无线传输CAN总线报文[2]。
3.1 设备网络模式
设备支持站点(Station)和接入点(AP)两种网络模式,可独立作为WIFI热点组建WLAN网络,同时也可作为客户端联入WLAN网络。在本无线通信方案中,将使用两个及两个以上WIFI通信设备共同搭建WLAN网络,其中一个加水设备上安装的WIFI通信设备作为站点(Station)开启WIFI热点搭建WLAN网络,其他加水设备及加水车辆上安装的WIFI通信设备作为接入端(AP)联入该WLAN网络。
3.2 设备通信模式
设备支持传输控制(TCP)和广播(UDP)两种通信模式[3-4]。
传输控制模式由两大部分组成,其中服务器端(TCP Server)监听设定的端口并等待客户端(TCP Client)连接。客户端(TCP Client)向设定的IP地址发起TCP链接,若链接失败,CAN设备将不断尝试重连直到成功。若连接成功,服务端就可以与客户端双向透明传输数据。
另在广播模式下,设备将CAN设备的数据通过UDP包的形式发送给指定的IP网络设备,同时监听端口,将所有接收的数据转发给CAN设备。
广播模式与单对单的传输控制模式相比有以下不同:
a.连接性。传输控制模式是面向连接的协议,而广播模式是无连接的协议。传输控制模式建立了一个可靠的双向通信通道,通过三次握手和四次挥手来确保数据的可靠性和完整性。而广播模式在发送数据之前不需要建立连接,每个数据包都是独立的,没有顺序、确认和重传机制。
b.可靠性。由于传输控制模式的连接性和可靠性机制,它能够保证数据的可靠传输。传输控制模式使用序列号、确认和重传来确保数据包按照正确的顺序到达目标,且不丢失和重复。而广播模式不提供可靠性保证,数据包可能会丢失、重复或乱序,因此在传输时对数据的完整性和可靠性依赖于应用层的处理[5]。
c.传输速率。由于传输控制模式的连接建立和数据校验等机制,它在传输过程中会引入较多的开销,导致一定的延迟和网络负载。相比之下,广播模式没有这些额外的开销,因此传输速度更快,对实时性要求较高的应用场景更为适用。
4 通信网络架构
当系统中存在多台车辆需要加水作业,同时无法固定加水机与加水车辆的相互关系时,此时采用TCP Server/Client的通信模式便不恰当,因为无法固定加水车辆需要连接的加水机的单一通信地址(IP地址)。此时便可采用广播模式进行相互通信。
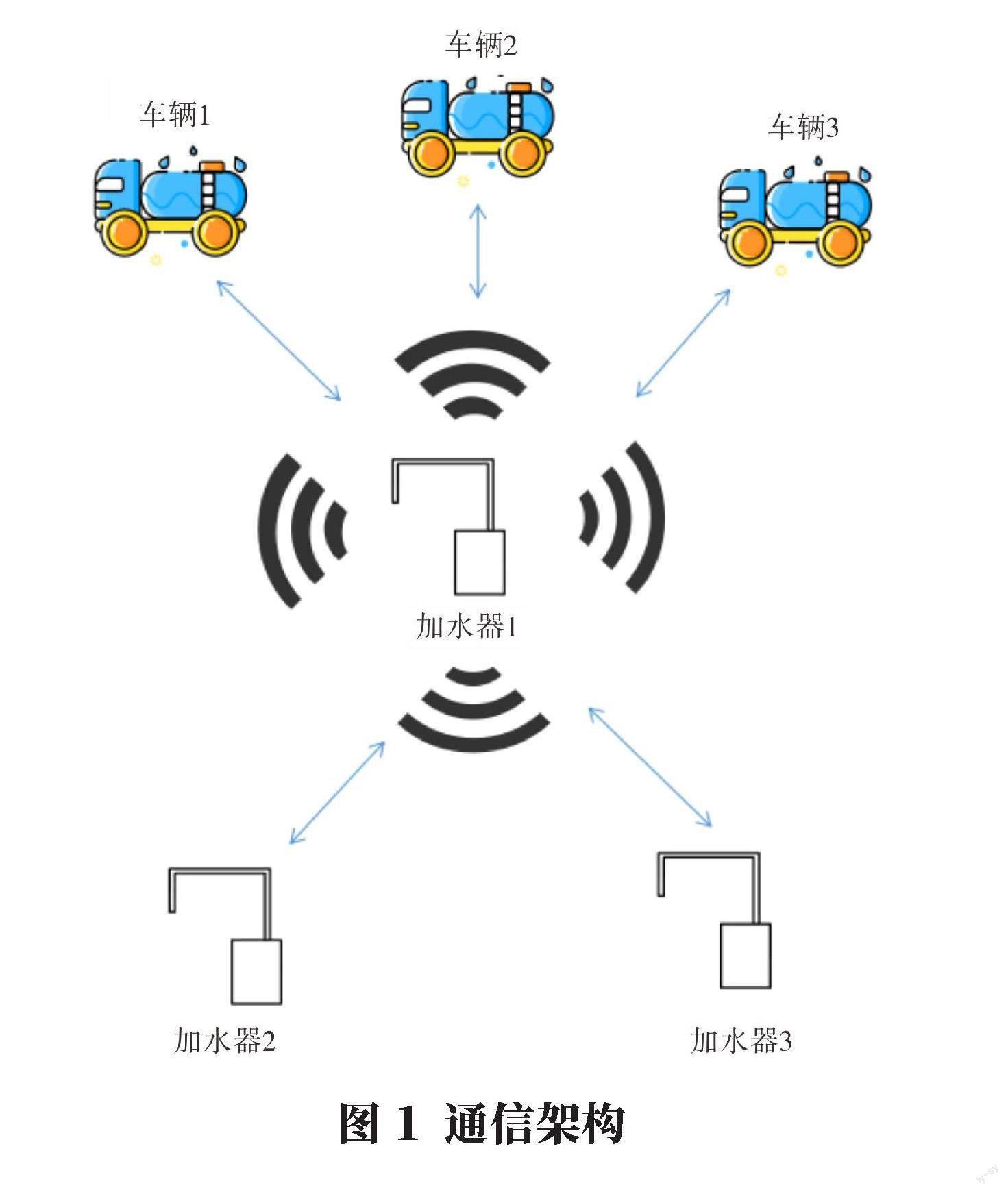
首先选择一台加水器,将内部的WIFI模块设定为站点(Station),使用出厂时统一预设好的WLAN网络SSID与密码开启WLAN网络;其他产品(包括加水器与加水车辆)出厂时统一预设好WLAN网络SSID与密码,均设置为接入点(AP)接入该WLAN网络。在网络中每一个WIFI模块均具有一个出厂时预设好的编号。
因此,考虑到广播模式无法分辨多台车辆与加水器之间通信的信息,当车辆前往加水时,需向网络中广播自身状态需求与所在加水器编号,此时全网络中的设备均可接收到此信号,只有与信号中编号对应上的加水器才会响应该信号并启动加水流程,具体如图1所示。
5 自动加水流程
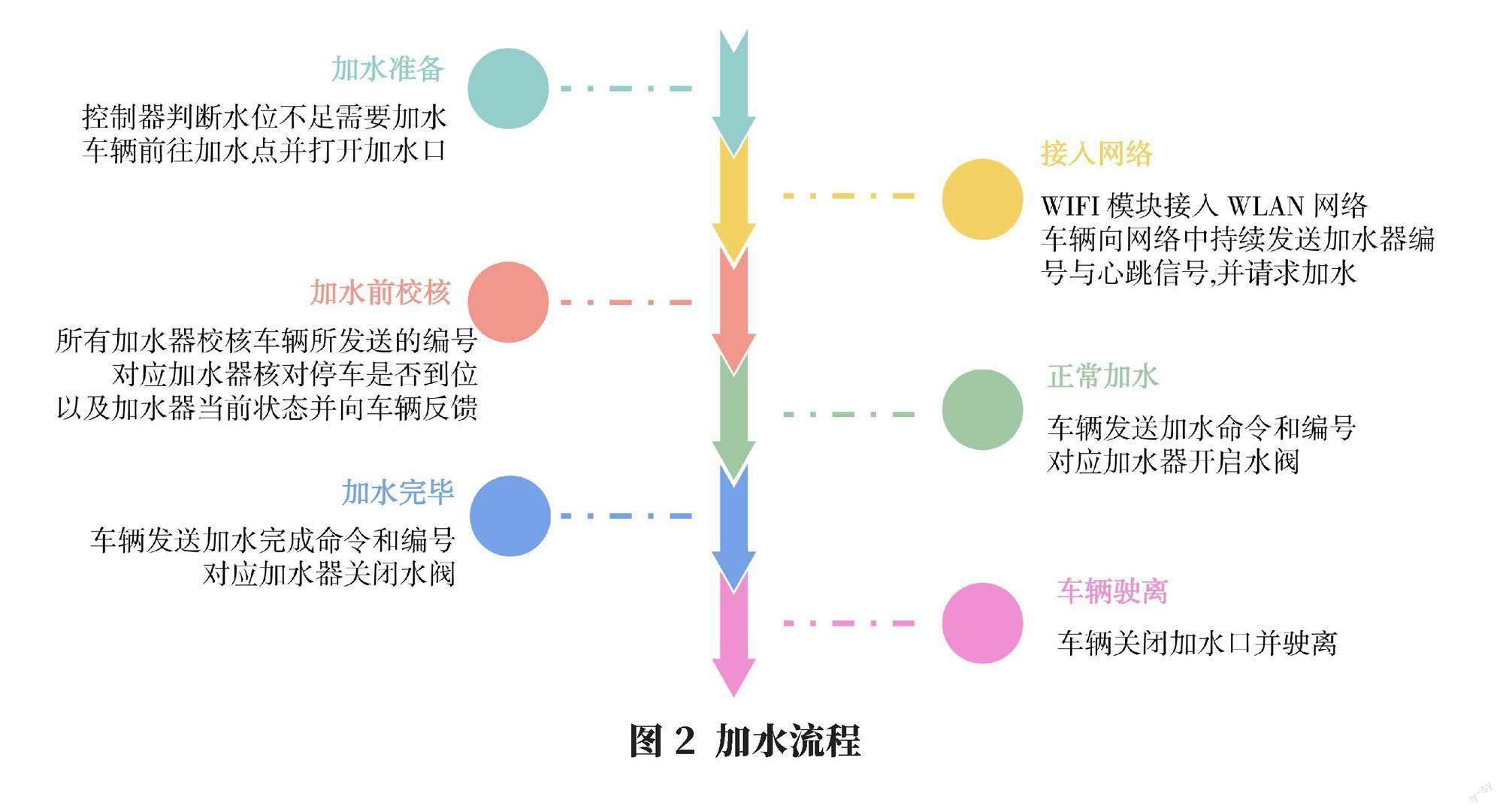
整车通过WLAN网络传输数据进行自动加水作业,具体加水流程见图2,可能遇到的问题见表2。
6 结语
无人作业环卫车自动加水的一种无线通信方案是在自动驾驶环卫车车技术的发展下应运而生的。本方案通过采用工业级WIFI通信模块,实现了自动加水装置与环卫车之间的无线通信和数据传输。该方案具备低成本、简单易用、安全可靠等優势,能够满足环卫车辆自动加水的需求。
在实际应用中,该方案可以灵活应用于不同场景。无论是一个自动加水装置对应一台加水车辆,还是多个加水装置对应多台车辆,都能够实现自动加水的功能,提高作业效率。同时,该方案的使用成本较低,维护成本也相对较低,为环卫车的运营和管理带来了一定的便利。
需要注意的是,本方案在实际应用中仍然存在一些挑战和改进空间。例如对于大规模的环卫车队伍,如何进行有效的数据管理和协调,以及如何确保无线通信的稳定性和可靠性,都需要进一步的研究和优化。此外随着无人作业环卫车技术的不断发展,该方案还可以与其他无线通信技术进行融合,进一步提升自动加水通信的效率和精确度。
综上所述,无人作业环卫车自动加水的无线通信方案为环卫车辆的自动化作业提供了一种可行的解决方案。随着技术的不断进步,相信这种方案将会在未来得到更加广泛的应用,为城市环境卫生的改善和智能化作业的推进做出积极的贡献。
参考文献:
[1]陈凯无人驾驶技术在环卫行业的应用[J]专用汽车,2021(7):74-77.
[2]SAE J1939 商用车控制系统局域网络(CAN总线)通信协议[S].
[3]RFC 768 UDP用户数据报协议[S]
[4]RFC 793 TCP传输控制协议[S].
[5]GB/T 28181-2011 安全防范视频监控联网系统信息传输、交换、控制技术要求[S].
作者简介:
唐仕安,男,1994年生,助理工程师,研究方向为专用车辆电气设计及自动化控制。
