基于高光谱成像的桥梁混凝土表面露筋病害识别
2024-02-29钟新谷张文辉李千禧
周 坤,彭 雄,钟新谷,张文辉,李千禧,赵 超
(1.湖南科技大学 土木工程学院,湖南 湘潭 411201;2.湖南科技大学 结构抗风与振动控制湖南省重点试验室,湖南 湘潭 411201;3.丽水市市政设施管理中心(丽水市节约用水管理中心),浙江 丽水 323020)
0 引言
桥梁作为交通关键节点,承担着与日俱增的交通流量压力,桥梁总体的技术状况不容乐观,特别近年来桥梁安全事故频发已成为社会关心的热点。因此,由相关机构根据《公路桥梁技术状况评定标准》(JTGT H21-2011)[1]对特、大型桥梁每年进行一次“体检”,中小型桥梁二年进行一次“体检”,及时发现不能保证正常使用、处于危险状态的桥梁。基于远距离成像设备[2]、爬壁机器人[3]和无人飞机[4]等平台携带可见光相机对桥梁表观缺陷进行识别与测量,能够较为有效地定位病害位置并量化缺陷尺寸信息,是解决高墩跨江跨河大桥技术状况评估的有效工具,学界已有大量研究[5-12]。在实际桥梁环境中,桥梁混凝土表面存在如光照、划痕、麻面、黏贴物等各种复杂背景,可见光成像仅基于缺陷边缘的灰度差信息,数据维度对表征复杂背景仍存在一定的局限性,对于复杂背景和相互重叠下的病害识别和分析目前还存在一定困难。
高光谱成像是运用光电技术检测物体对光谱波段信号的辐射和吸收情况,将该信号转换成可供分辨的图像和图形,可基于吸收峰的位置和强度分析被测物体的物理性质和物质组成,如同于物质的“指纹”[13]。高光谱技术的民用化是由航空航天、天文、物理领域应用发展而来,我国于2021 发射的高光谱遥感观测卫星(高分五号02 星),全面提升了对大气、水体、陆地的观测能力,基于反演算法和高光谱图像识别先进技术实现了对大气环境、水环境、生物当量、土地盐碱含量等实时监测[14-15]。
将高光谱测试技术应用于土木材料领域相关测试的研究近年来也得到迅速发展,如李笑芳[16]等人研究了基于高光谱技术建筑反射隔热涂料厚度检测技术,构建涂料施工厚度检测模型。Bonifazi[17]等进行了基于高光谱成像的再生混凝土骨料上附着砂浆的评价研究,以评估再生混凝土骨料表面的残余砂浆含量;Bonifazi[18]等将高光谱成像和分级PLS-DA 应用于建筑及拆卸废物中的石棉识别,能快速检测建筑废弃物是否存在石棉;Gargiulo[19]等使用近红外光谱成像系统对建筑和建筑垃圾中的聚烯烃分类,提出了一种客观且无损的聚烯烃回收链分类和质量控制方法。
高光谱成像对物质成分具有精确表征的特点,为基于高光谱成像的结构健康监测提供了基础。如邵慧[20]等人提出了一种适用于古建筑建模的全波形高光谱激光雷达,获取古建筑完整的空间结构、历史演化及其健康状态等特征信息;严阳[21]等人利用可见光以及近红外波段下获取的高光谱图像,分析伪装目标在不同背景下的伪装效果;熊显名[22]等人提出将“环境变量”作为特征值的解决方法,将光谱数据组合成新的数据波形,结合神经网络有效的识别路面状态;田英慧[23]等人研究了高白度、高反射率的雪地型伪装材料的性能检测技术,通过光谱反射因数的欧氏距离和光谱角余弦计算伪装样品与雪地背景的相似性;张海馨[24]等人设计了一种基于尾焰光谱分析特征分析的识别系统,通过结合跟踪成像模块对准目标结合光谱分析模块识别目标,实现对高速运动目标的快速识别。程俊毅[25]等人通过研究地面光谱测量手段获取了公路沥青路面的光谱遥感数据,探索了沥青路面老化过程与光谱响应变化的规律;Ichi[26]等人提出利用高光谱图像收集数据对铁路道路道砟含水率进行非接触式检测与评价的方法;Kim[27]等通过地物光谱仪获取桥梁混凝土材料表面完整光谱反射,提出了基于高光谱成像定量评估混凝土风化程度的新方法;Runcie[28]等人提出了高光谱成像和分类技术作为客观评估民用或其他结构上油漆状态的方法。文献表明基于高光谱成像对病害监测识别已有一定的研究,但桥梁病害与混凝土背景的光谱信息差异较少,造成识别难度较大、效率低等问题,如何扩大谱线之间的差异、降低数据维度,提出谱线峰值提取与特征学习预测建模方法,还有待进一步研究。
因此本文提出基于高光谱成像的桥梁混凝土表面露筋病害识别方法。利用线阵高光谱相机集成匀速步进滑轨装置,形成高光谱成像测试系统,采集桥梁混凝土表面露筋病害图像;基于桥梁露筋病害高光谱图像谱线与空间特征,结合预处理——平滑滤波-多元散射 校 准 ( Savizky-Golay-Multivariate scattering calibration,SG-MSC)、特征空间变换——光谱导数法(First derivative,FD)、特征变量选择算法——竞争自适应重加权抽样(competitive adapative reweighted sampling,CARS),将原始光谱曲线数据经特征空间转换提取相应特征值并显示波段;以光谱曲线特征向量构建数据集,基于支持向量机[29]形成露筋病害识别预测模型,如图1所示。

图1 高光谱图像分类流程示意图Fig.1 Schematic diagram of hyperspectral image classification process
1 高光谱成像系统原理与实际成像
1.1 高光谱成像成像系统
如图2所示,高光谱图像采集系统为FigSpec 高光谱相机FS-15(线阵扫描相机),其利用高衍射效率的透射式光栅分光模组与高灵敏度面阵列相机结合。高光谱相机传感器的波谱线范围为900~1700 nm,光谱分辨率为8 nm,共254 个波段。图像宽度为320 像素,图像长度根据线阵扫描速度与时间而定。相机为微机自动控制形成三维高光谱图像,具体参数如表1所示。
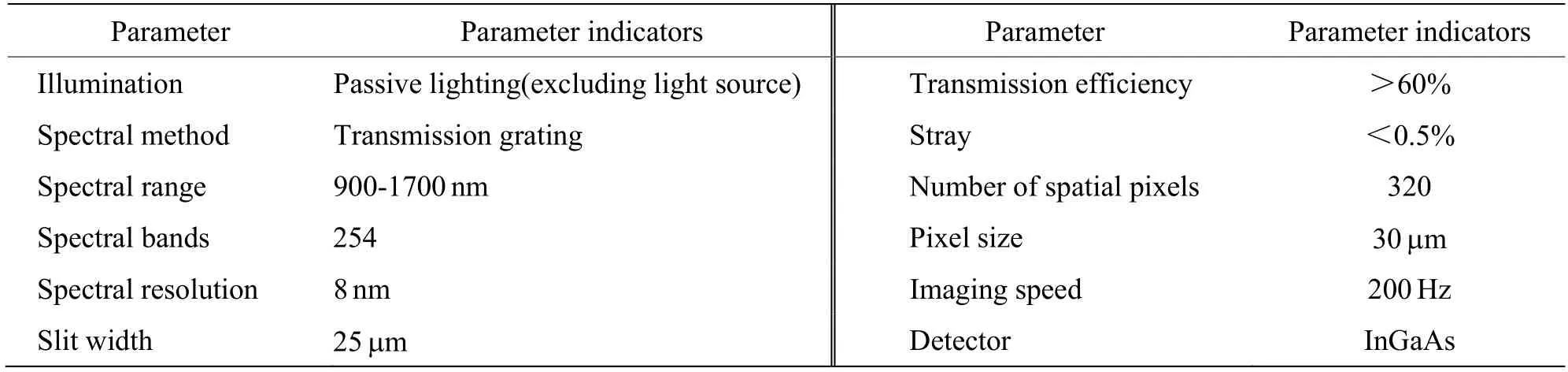
表1 高光谱相机各参数指标详情Table 1 Details of each parameter index of hyperspectral camera

图2 高光谱成像测试系统各组成部分Fig.2 Components of a hyperspectral vision test system
1.2 桥梁混凝土露筋病害高光谱成像
1)高光谱相机扫描速度
为对实际桥梁混凝土露筋病害进行高光谱成像,基于线阵扫描相机特点结合可移动式电滑轨对高光谱相机进行集成,形成如图2所示的高光谱成像测试系统。根据相机的基本参数,计算相机最佳运动速度V:
式中:d为目标与被测物体距离,m;Fps 为采集帧率,帧/s;r为相机分辨率,该相机分辨率为320dpi;Fov为视场角,该相机视场角为21.74°。
2)高光谱相机实际成像
由于光源在每个波段的分布不均匀,相机中的暗电流以及周围环境的影响,收集的高光谱图像将包含一定的噪声量。为了尽可能减少噪声,在扫描样品之前,对相机进行实验现场的深色和白色参考校准[18]。深色和白色参考用于归一化样品的反射率,因此,校准后高光谱图像IC可以由公式(2)获得:
式中:IRaw是未经处理的原始反射谱线;IDark表示深色参考谱线;IWhite表示白色参考谱线。经黑白平衡校准后,如图3(a)所示,利用高光谱成像系统对湘潭湘江三大桥8-20#墩柱进行了实际外观缺陷检测,获得了钢筋露筋病害和各构件混凝土高光谱成像图像。如图3(b)所示,为移动平台搭载FS-15 高光谱相机测试混凝土表面钢筋露筋所得到的三维高光谱图像。
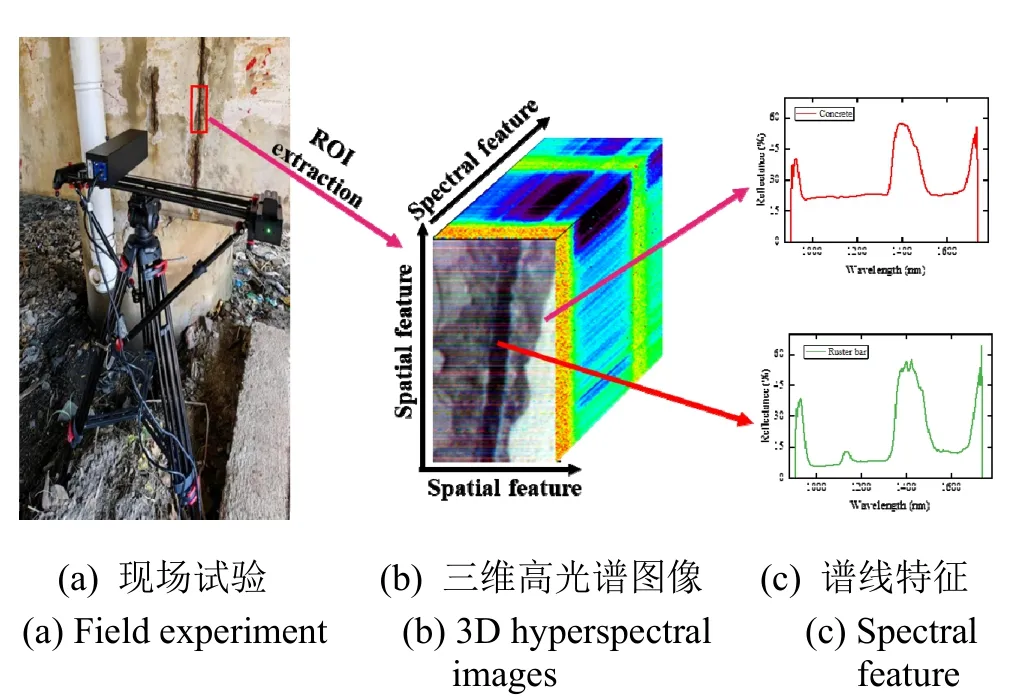
图3 高光谱数据立方体以及相对于锈蚀钢筋与混凝土反射率的光谱变化Fig.3 Hyperspectral data cube and spectral variation of reflectance relative to corroded steel bar and concrete
如图3所示,高光谱成像图像具有3 个主要维度,前两个维度代表空间特征,第3 个维度代表光谱谱线特征[17]。如图3(c)所示为高光谱图像数据立方体、锈蚀钢筋和混凝土背景的波长-反射率曲线。
2 室内标准模型的建立
2.1 室内样品制作与图像采集
在室内选取混凝土试块与锈蚀钢材作为样品,在准备样品过程中尽量避免过度擦拭样品表面,确保保持样品原始属性。启动高光谱成像系统,设置成像距离为0.3 m,图像采集频率为50 帧/s,自动计算出滑轨移动速度为0.047 m/s。高光谱成像时两样品应放置于同一水平面上,同时样品放置干净背景下来防止高光谱图像产生噪声。采集到的图像如图4所示。

图4 室内标准模型高光谱图像Fig.4 Indoor standard model hyperspectral images
2.2 高光谱数据预处理
在高光谱图像采集过程中,由于环境约束、样品属性(尺寸、形态等)等方面的影响,光谱数据通常包含大量具有强协方差的冗余和噪声变量,对后续的识别工作增加了难度。采用合适的光谱预处理方法可以纠正光谱之间的相对基线偏移,提高模型的准确性和鲁棒性[30]。
为了更好地提取光谱特征,减少噪声的影响,采用 Savizky-Golay 平滑滤波器和多元散射校准(Multivariate scattering calibration,MSC)的组合算法进行高光谱图像谱线预处理,强化光谱波段特征点,加强数据之间的可比性,避免高反射率值带来的计算复杂性。SG 是一种基于局部多项式最小二乘拟合的滤波方法[30]。该滤波器的主要特点是确保频谱的形状和宽度保持不变,同时消除环境和设备引起的噪声。MSC 有效地消除了由不同散射水平引起的光谱差异[31],从而增强了光谱和数据之间的相关性,能有效减少由基线偏移和散射水平引起的光谱变异性。预处理前原始锈蚀钢筋与混凝土背景的光谱谱线如图5(a)所示。使用SG-MSC 对数据进行预处理时,选择的窗口大小为25,多项式次数为7,经预处理后的光谱谱线如图5(b)所示。

图5 高光谱图像谱线预处理Fig.5 Hyperspectral image line preprocessing
2.3 特征空间变换
由于高光谱相机工作波段在近红外光波段(900~1700 nm),其光谱的反射率特征主要受物料表面状态影响,在该波段范围内无机物敏感性较弱,使得锈蚀钢材与混凝土背景的光谱曲线之间存在重叠区间,缺少差异,识别难度较大。因此采用特征空间变换方法对高光谱反射率特征进行计算,放大其差异,有效降低识别难度。
光谱导数法可以有效地消除反射率基线偏移,一定程度上避免颜色、光强等因素的影响,有效识别重叠区域,提供比原始光谱分辨率更高的光谱轮廓变换,增加分辨率和灵敏度[32-33]。
经SG-MSC 预处理光谱信号是离散的反射率值,使用直接导数法对反射率进行求导,扩大锈蚀钢材与混凝土之间的差异,并选择一阶导数作为计算法则。如图6所示为经一阶光谱导数法处理后的谱线特征。

图6 一阶光谱导数特征值曲线Fig.6 First derivative eigenvalue curves
2.4 特征提取
一阶导数对高光谱数据特征空间转换后,显著增加了锈蚀钢材与混凝土背景之间的差异,但仍属于高维度数据,具有多个波段、相邻波段之间的强相关性和高冗余特点[34],增加了识别模型构建的难度。
CARS 是一种特征变量选择方法,它将蒙特卡罗抽样(MC)与偏最小二乘(PLS)模型回归系数相结合[35]。交叉验证(CV)用于确定CV(RMSECV)均方根误差(RMSE)最低的子集。RMSECV 的计算如下所示:
式中:y表示真实值;yCV表示CV 中的预测值。
使用CARS 算法的特征提取结果如图7所示。主成分的最大数量设置为20,MC 采样次数设置为50,并进行5 次交叉验证。随着MC 样本数量的增加,特征数量呈指数级减少。RMSECV 方差先减小后增大,主要是因为去除了波长变量中的有效信息,随着RMSECV 值增大,模型性能降低。在图7(b)中,RMSECV 在第21 次采样处达到其最小值,其值为0.0064。CARS 算法筛选的特征变量详见表2。CARS 算法共筛选了23 个特征变量,占总波长变量的9.06%。

表2 CARS 算法提取特征波段Table 2 Feature bands were extracted by CARS algorithm

图7 CARS 算法的特征提取结果Fig.7 Feature extraction results of CARS algorithm
数据降维后,将具有254 维特征的原始数据压缩为23 维。平滑效果较好,并保留了原始数据中的大部分信息,保留了原有的趋势特征。所提取特征点在光谱中的对应位置如图8所示(以混凝土特征值曲线为例)。
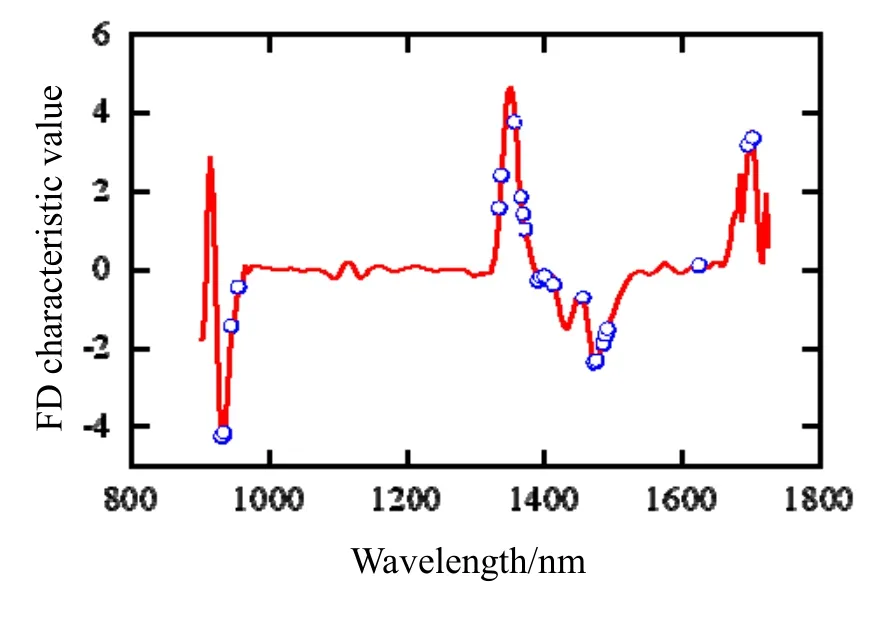
图8 所选特征变量的分布Fig.8 The distribution of the selected feature variable
如表2所示,锈蚀钢筋与混凝土背景之间的差异难以用特定的波长来表示,经CARS 算法提取的特征波段集中在1400 nm 左右。因锈蚀钢筋病害以深色为主,反射率较低,与未受锈蚀钢筋侵蚀混凝土有较大区别,钢筋锈蚀过程长期与混凝土结合,导致锈蚀钢筋附近混凝土颜色变深,使得区域的混凝土与锈蚀钢筋的光谱反射率曲线相近。
2.5 基于支持向量机的光谱谱线分类与可视化
支持向量机(Support vector machines,SVM)是基于结构风险最小化的一种机器学习算法,具有泛化能力强、适用于小样本分类等优点[29]。如图9所示,支持向量机计算出最优超平面将光谱谱线进行分类,最大限度的减少泛化误差并最大化裕量。基于高光谱成像的锈蚀钢筋与普通混凝土样本数据集制作的时间成本较高,因此本文利用支持向量机算法,建立小样本数据集,训练锈蚀钢筋与混凝土背景光谱谱线自动识别模型。选取具有强学习能力、适应范围宽的径向基(radial basis function,RBF)核函数作为支持向量机的核函数。

图9 支持向量机分类模型示意图Fig.9 Schematic diagram of support vector machine classification model
在图4混凝土样品与锈蚀钢材样品上各选取大小为50×50 的区域大小的高光谱图像,提取出共5000条高光谱信息,以构建SVM 模型。将提取出来的5000条高光谱信息作为训练集提供给SVM 训练,结果如表3所示。
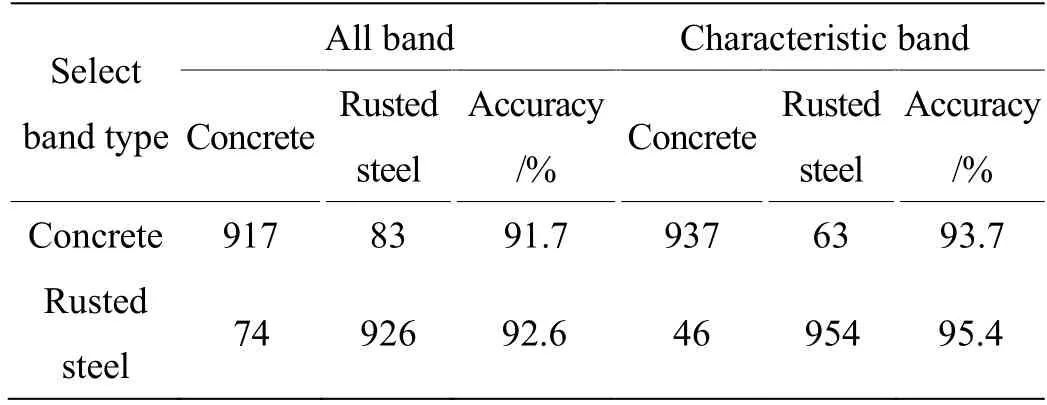
表3 波段类型选取识别结果Table 3 Identification results of band type selection
结果表明,经特征提取后的波段相比于全波段在识别准确率上有提升,同时大幅度降低了计算时间成本。
3 现场试验结果与讨论
利用高光谱成像系统对湘潭湘江三大桥8-20#墩柱进行了实际外观缺陷检测,获得了露筋病害和各构件混凝土高光谱成像图像。将采集到的高光谱图像利用建立的室内标准识别模型进行预测识别,并将识别结果与传统识别方法进行比较。
如图10(a)~(c)所示分别为桥梁混凝土露筋病害的高光谱成像经过平滑滤波-多元散射校准、光谱谱线求导、特征变量选择等系列预处理后,对三维高光谱图像每一点的谱线代入训练完成的支持向量机模型中进行预测,得到的光谱特征分类结果如图10(c)所示。对空间原始图像利用图像标记工具进行逐像素标记生成标定图像,结果如图10(b)所示,用于评价该空间分割算法的分割效果。如图10(d)~(f)为桥梁混凝土露筋病害的可见光图像传统阈值分割和人工标记的结果。对识别结果采用交并比(IOU)和真阳率(TPR)两种指标对结果进行评价,计算公式如:

图10 谱线特征分类与阈值分割对比Fig.10 Spectral line feature classification and threshold segmentation
式中:TP 为不同分类方式结果与人工标记结果的交集;FP 是过分割结果;FN 为欠分割结果。采用不同分类方法的结果如表4所示。

表4 不同分类方法结果Table 4 Results of different classification methods
交并比(IOU)是算法分割和标定结果的交叠率,即它们的交集与并集的比值,比值越高说明分割效果越好,当IOU 为1 时为完全分割。真阳率(TPR)代表了分割结果与标定结果的交集与标定结果的比值,即在人工标记结果上实际分割了多少,当TPR 为1时也代表完全分割。采用光谱特征分类方法的TPR和IOU 值明显大于传统阈值分割方法,且TPR 和IOU均大于0.9,表明本文采用基于光谱特征分类的方法具有良好效果。
4 结论与展望
本文提出了基于高光谱成像的桥梁混凝土表面露筋病害识别系统与方法。利用线阵高光谱相机集成匀速步进滑轨装置,形成了高光谱成像测试系统。采集了桥梁混凝土表面露筋病害图像,并提出了结合平滑滤波-多元散射校准、光谱导数法、特征变量选择算法高光谱图像谱线预处理方法,并基于支持向量机训练了露筋病害识别预测模型,以高光谱成像测试系统对实际桥梁混凝土露筋病害进行了识别,基于谱线特征识别露筋病害达到90%以上精度,具有可行性和广泛应用前景。
桥梁混凝土病害由荷载与环境侵蚀共同作用导致,且随着时间的推移病害还将逐渐发展,严重影响服役寿命,造成安全隐患。基于可见光成像结合深度学习人工智能技术可较好地对桥梁混凝土病害进行分类和识别,但由于仅有病害灰度及区域边缘信息,具有局限性,利用高光谱成像具有更高维度信息可有效表征物质属性,后续将结合无人机机载高光谱成像、增加病害类别,能广泛应用于基于视觉的桥梁结构表面病害识别。另一方面,桥梁混凝土关键破坏性病害具有稀疏、缺失、长尾的特点,难以形成数据量大、鲁棒性好的结构病害数据集,将使人工标记、训练工作量巨大。基于高光谱成像图像谱线的唯一性特征,可大量减少数据标记和样本数量。结合空间-谱线三维特征,可进一步构建深度学习网络模型,提高识别的自动化、智能化程度。
在未来的研究工作中,将高光谱相机与无人飞机进行集成,形成无人飞机机载高光谱成像系统对全桥进行扫描成像,自动调整曝光时间、测量物距和飞行速度,实现快速、稳定成像。
