基于云计算的航空飞行试验数据中心任务调度优化架构设计
2024-02-29许辰宏
许辰宏,于 刘
(上海航空工业(集团)有限公司,上海 201206)
0 引言
云计算是一种特殊的分布式运算方法,借助网络云环境,将庞大的数据计算处理程序按需分解成多个小型程序文件,再利用由服务器样机组成的运行系统,对小程序进行深度分析与处理,并将执行结果返回至用户端主机之中[1]。云计算具有与网格计算极其相似的应用特征,在该项技术手段的作用下,数据处理任务的完成时长大大缩短,这也为强大的网络服务功能的实现提供了保障[2]。随着技术手段的发展,云计算已经不仅只是一种简单的分布式计算方法,而是兼具了负载均衡、网络存储、信息备份等多项应用功能的综合性运算方法,特别是在因特网体系的配合下,云计算还可以按需配置相关网络数据资源,从而为用户对象提供多样性与个性化服务。
航空飞行试验数据简称为试飞数据,处理试飞数据是飞行器试飞工作的重要组成部分。对于航空飞行试验数据的处理,首先要对所得数据样本进行处理;然后联合离散点,计算航空飞机的飞行能力;最后规划完整的飞行航迹曲线。在处理航空飞行试验数据时,如何实现数据样本实时调度是一项亟待解决的应用难题。文献[3]提出基于Cesium时空三维可视化的调度机制。利用双线程渲染管线,绘制飞行场景,再联合瓦片数据更新策略,确定数据任务架构体系的调度能力。文献[4]提出基于相继干扰消除和跨层并发传输的调度策略。通过减少可并发传输链路数目的方式,控制试飞数据的聚合度水平,再根据低时延标准,确定调度策略的执行流程。
然而上述两类应用机制不足以将数据吞吐量水平提升至实际需求标准,易导致中心任务调度行为出现明显的滞后现象。为解决上述问题,设计基于云计算的航空飞行试验数据中心任务调度优化架构。依据粒子群算法对航空飞行试验数据中心任务的测度值域进行优化,并结合云计算建立航空飞行试验数据调度模型。在面向航空飞行试验中心的云计算环境下,通过分析任务的资源利用率和时延等特性,研究任务调度体系结构的最优配置,提升数据吞吐量,解决中心任务调度行为滞后的问题。结合 WiRo中心网络和 EMU的调度体系结构,完成航空飞行试验数据中心任务的云计算任务调度体系结构设计。
1 中心任务调度优化架构体系
航空飞行试验数据的中心任务调度优化架构由WiRo中心网络、EMU调度结构两部分组成,且EMU调度结构的设计主要针对试验数据预测器与飞行任务分配器,本章节将针对调度优化架构体系的设计方法展开深入研究。
1.1 WiRo中心网络
在航空飞行试验数据中心任务调度优化架构中,WiRo中心网络负责将服务器平台、航空飞行试验数据、网络运行机制集合起来,并借助数据通路,将相关信息文本反馈至既定任务调度主机之中[5]。服务器平台的搭建以WiRo网络中心服务器作为基础,可以同时打开Trunk网关接口与IDS网关接口,从而为航空飞行试验数据提供稳定的传输环境,由于数据样本的传输具有单向性特征,所以数据通路的连接只能由WiRo服务器指向下级网关接口组织。中心任务调度优化架构在单位时间内所需转存的航空飞行试验数据样本总量相对较多,所以Trunk网关接口、IDS网关接口必须具有快速处理数据样本参量的能力,且在架构体系运行的过程中,网关接口组织必须对数据样本进行无差别提取[6]。具体的WiRo中心网络布局形式如图1所示。

图1 WiRo中心网络布局形式
网络运行机制管控航空飞行试验数据中心任务服务器,可以联合SSLVPN、VLAN、IPS、IDS共4类应用组织维护WiRo中心网络的运行稳定性,从而避免数据样本差异化传输行为的出现,实现对中心任务组织的优化调度处理。
1.2 EMU调度结构
EMU调度结构由试验数据预测器、飞行任务分配器两部分组成。
1.2.1 试验数据预测器
试验数据观测器是负载于WiRo中心网络之下的硬件应用结构,能够为航空飞行试验数据的处理提供稳定的运行环境。主体应用部分由观测器元件、数据处理元件组成。观测器设备与OpenFlow平台、PHY设备保持对应连接关系[7]。OpenFlow平台是一个半开放的数据样本调度处理结构,与WiRo中心网络的服务器平台直接连接,既可以接收云计算数据库主机中暂存的航空飞行试验数据,也能够调配网络运行机制中的SSLVPN、VLAN、IPS与IDS应用组织,从而使得试飞数据样本始终保持相对积极的传输状态。PHY设备反控ToR处理器,能够协调航空飞行试验数据的输出速率,从而间接避免数据吞吐量受限问题的出现。数据处理元件的搭建以EMU调度设备为基础[8]。在边缘层体系之中,WiRo网络交换机经由无线传输网络,对EMU调度设备进行控制,且随着网络体系对于数据样本负载能力的增强,航空飞行试验数据的实时传输速率也会不断提升。基于EMU调度结构的试验数据观测器部件如图2所示。
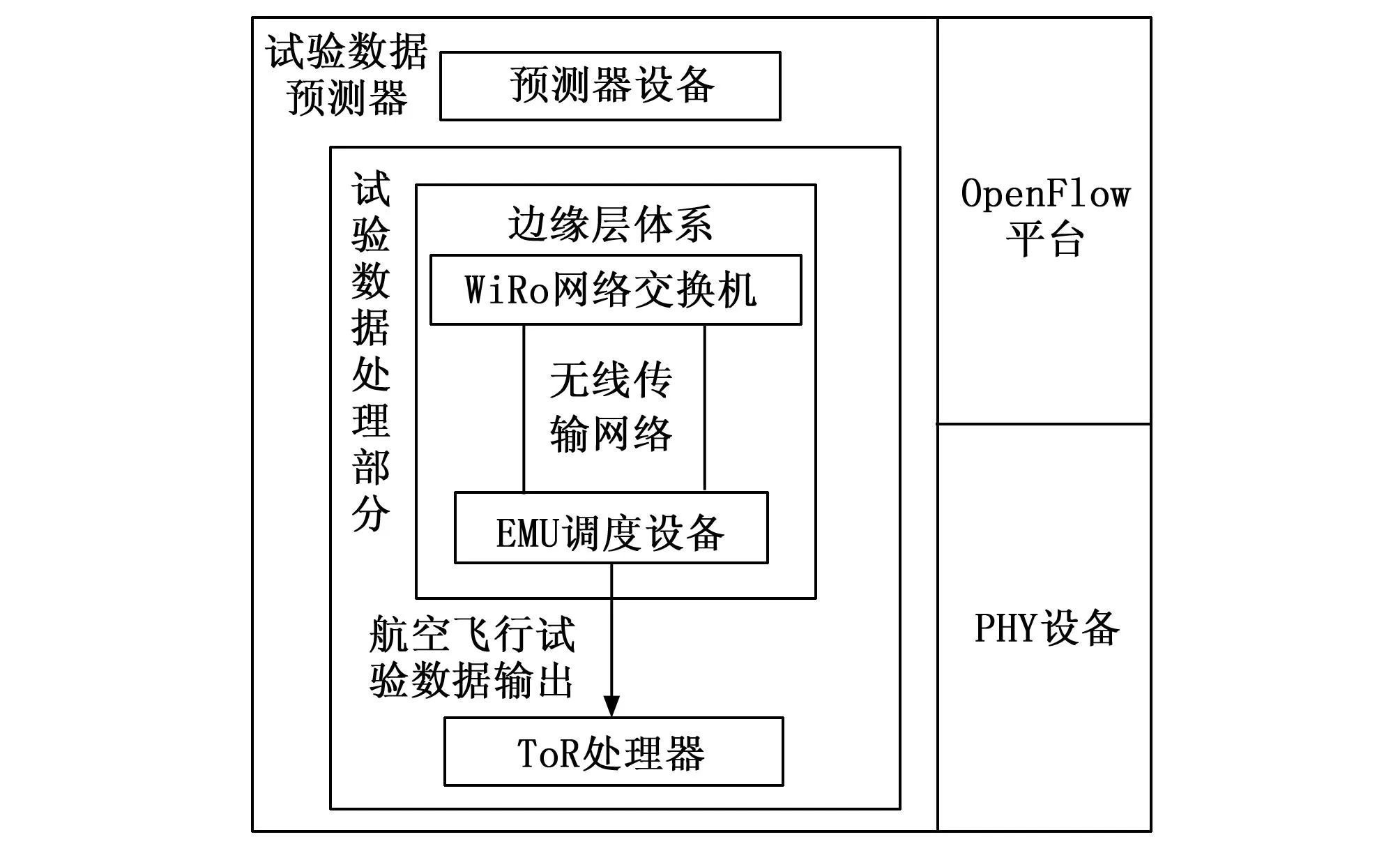
图2 试验数据预测器结构简图
如果OpenFlow平台与PHY设备的运行能力受限,则表示当前情况下预测器设备并不能对航空飞行试验数据进行妥善处理。
1.2.2 飞行任务分配器
飞行任务分配器是EMU调度结构体系中的核心应用元件,由SOIC任务处理部件和任务调度中心两部分组成,结构模型如图3所示。SOIC任务处理部件管控微电路集成单元与逻辑门单元,同时协调EMU调度结构、FPGA芯片、MCU芯片等多个硬件设备结构之间的连接关系,由于EMU调度结构执行能力的实现需借助microchip芯片与film芯片,所以调度SOIC任务处理部件是一个较为复杂的运行环节[9-10]。任务调度中心由多个项目组共同组成,其中每个项目组单元都包括一个flipped设备、一个PGA设备和一个FCBGA设备,能够在云计算技术的作用下,调度航空飞行试验数据,并将相关信息参量反馈至中心任务调度模块之中。

图3 飞行任务分配器结构模型
SOIC任务处理部件与任务调度中心之间存在明显的执行任务反馈关系,所以为保证调度框架对航空飞行试验数据的实时处理能力,要求EMU调度结构的运行速率必须同时适应试验数据观测器与飞行任务分配器。
2 基于云计算的航空飞行试验数据调度模型
为利用中心任务调度优化架构实现对航空飞行试验数据的按需处理,还应在云计算技术的基础上,求解PSO优化度量值与惯性权重,并联合相关参数指标,定义粒子编码条件。
2.1 PSO优化度量值
PSO优化度量值求解是一个连续计算过程,需要按照云计算标准,对同一航空飞行试验数据样本进行多次求导,从而最大化避免数据传输滞后问题对中心任务调度行为造成影响[11]。设δ表示一个随机选定的航空飞行试验数据样本,其取值满足如下表达式:
δ∈[1,+∞)
(1)
在云计算技术的认知中,连续3次求导所得数值结果才能够得到中心任务服务器的认可,因此在计算PSO优化度量值时,至少需进行3次求导才能够得到滞后性最弱的航空飞行试验数据样本[12]。对于PSO优化度量值的求解遵循如下计算流程:
第一次求导:
δ′=α·δ|α≠0
(2)
第二次求导:
δ″=α′·δ′|α′≠0
(3)
第三次求导:
δ″′=α″·δ″|α″≠0
(4)
PSO优化度量值计算式:
(5)
式中,α表示0阶偏导系数,α′表示1阶偏导系数,α″表示2阶偏导系数,e、r表示两个不相等的航空飞行试验数据认证参数,且e≠0、r≠0的不等式条件同时成立,χe表示基于参数e的数据样本传输滞后性认证向量,χr表示基于参数r的数据样本传输滞后性认证向量。PSO优化对于航空飞行试验数据样本的处理不可逆,所以在同一运算周期内,只依靠单次取样的物理参数就可以得到度量值指标的计算结果。
2.2 惯性权重

(6)
εmin参数的出现,表示航空飞行试验数据的变化量保持递减状态;εmax参数的出现,则表示航空飞行试验数据的变化量保持累积状态。
2.3 粒子编码
粒子编码也可以理解为航空飞行试验数据样本的独立编码,在中心任务调度优化架构中,只有细致约束粒子编码原则,才能使云计算函数条件更符合数据调度的实际处理需求[15-16]。对于航空飞行试验数据样本的独立编码要求粒子基数p应是一个不为零的物理量,且在对相关航空飞行试验数据样本进行取值时,还应保证惯性权重指标与当前取值参量的数值对应关系。对于粒子基数p的计算满足公式(7):
(7)

在公式(7)的基础上,设γ表示数据粒子的编码参数(设计航空飞行试验数据中心任务调度优化架构时,必须保证参数γ的取值满足云计算原则),n表示不大于粒子基数p、不小于自然数1的一个随机物理量。
基于云计算的航空飞行试验数据样本粒子编码条件为:
(8)
n取值越接近自然数1,表示应用粒子编码原则所需定义的航空飞行试验数据样本量越多。
2.4 云计算函数条件

(9)
φf→g向量的取值不具备随机性,所以在推导云计算函数条件时,只能针对航空飞行试验数据的既定取值结果进行计算。
3 任务调度架构的优化配置
针对中心任务调度优化架构的配置,还应按照云计算原则对航空飞行试验数据进行取样,再联合资源占用率系数,确定动态权限,从而求解得出长尾延迟参量的具体数值。
3.1 中心调度任务的资源占用率
当多个航空飞行试验数据被投放到同一个调度架构体系之中时,中心调度任务会占用架构体系中大量的数据样本资源,这就会导致WiRo中心网络在提取数据样本时面临信息吞吐量受限的问题,从而导致中心任务调度行为表现出明显滞后的情况[19]。设F1,F2,…,Fc分别表示c个满足云计算函数条件的数据资源样本,且在取值数据资源时,F≠0的不等式取值条件恒成立,ι1,ι2,…,ιc分别表示与数据资源样本匹配的中心调度任务占用参数,联立上述物理量,推导中心调度任务资源占用率的计算表达式如公式(10)所示:
钢轨波浪型磨耗是指线路在投入运营后,出现在钢轨接触表面的类似波浪形的不均匀磨损。钢轨波浪形磨耗形成之后,列车行驶其上必将激励起车辆、轨道系统的振动, 而且这种振动是随着轨道不平顺的加剧而加剧的。车辆、轨道系统的剧烈振动不仅引起行李移位,使旅客舒适度降低,而且还会加速动车组车轮和轨道结构的破坏。随着我国高速铁路运营里程的增加和车次的增多,铁路现场钢轨波磨分布变得更加广泛,问题日益严重。对已经开通的高速铁路波磨成因等问题进行研究,不仅对整治已有高速铁路出现的波磨问题起到积极作用,而且对新开通和尚未开通的线路,也能起到很好的预测和防护作用。
(10)
为解决因数据吞吐量有限而造成的中心任务调度行为明显滞后的问题,中心任务调度优化架构对于航空飞行试验数据的处理必须满足实时性原则。
3.2 动态数据权限
动态数据权限就是中心任务调度优化架构在处理航空飞行试验数据时所遵循的处置权限。按照云计算法则筛选航空飞行试验数据,所得每一个物理量都保持定值状态,所以动态数据权限求解结果是一个有限的数值区间,且区间内每一个数据变量都对应唯一的占用率指标[20]。动态数据权限定义式为:
(11)
式中,λ表示云计算法则对于航空飞行试验数据的筛选条件,κ表示动态赋值参数,H表示航空飞行试验数据的有限值取样条件。K取值属于(-∞,0)时,中心任务调度优化架构虽然具有处理航空飞行试验数据的能力,但不一定符合云计算法则的运算标准;若K取值属于(0,+∞),则表示中心任务调度优化架构具有处理航空飞行试验数据的能力,且运算标准也一定符合云计算法则。
3.3 长尾延迟参数
长尾延迟参数决定了在处理航空飞行试验数据时,中心任务调度优化架构的时延水平,只有在动态数据权限属于(0,+∞)的数值区间时,所得执行结果才符合算法约束条件,所以长尾延迟参数计算结果也只有在大于零的情况下,才能够有效控制中心任务调度优化架构的时延水平。对于长尾延迟参数的求解满足如下表达式:
(12)

4 实例分析
4.1 实验流程与参数分析
为分析基于云计算的航空飞行试验数据中心任务调度优化架构的应用能力,设计如下对比实验。
1)按照图4所示的闭环模式对航空飞行试验数据进行处理,当Windows主机中的样本累积量达到既定数值标准后,开始实验,相关实验设备的具体型号如表1所示;
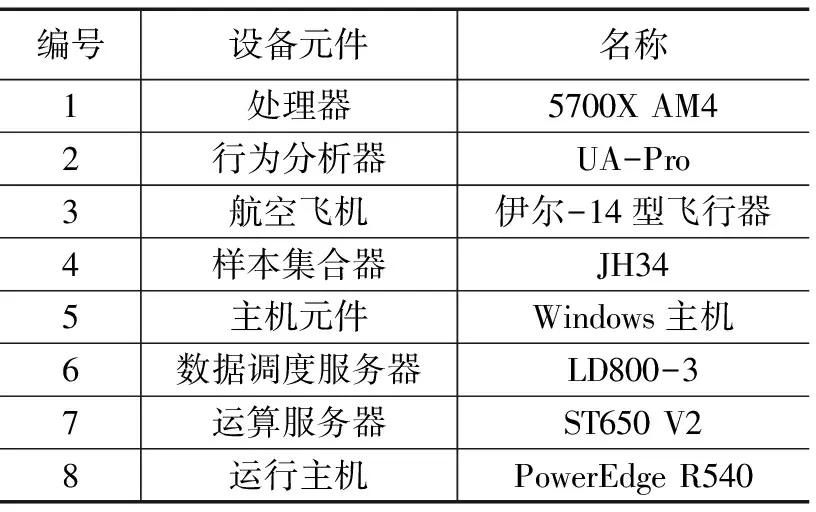
表1 实验设备
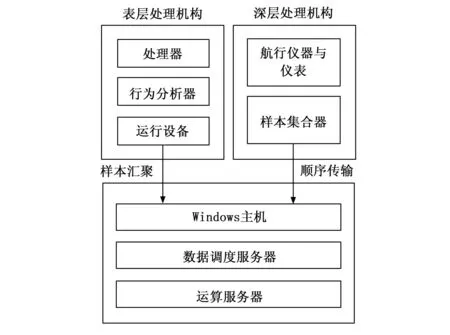
图4 航空飞行试验数据处理模式
2)在Windows主机中输入云计算执行程序,记录在该架构体系作用下,单位时间内航空飞行试验数据吞吐量的数值变化情况,所得数据为实验组样本;
3)清除已生成的数据变量,在Windows主机中输入Cesium时空三维可视化执行程序,记录在该架构体系作用下,单位时间内航空飞行试验数据吞吐量的数值变化情况,所得数据为A对照组实验样本;
4)再次清除已生成的数据变量,在Windows主机中输入相继干扰消除和跨层并发传输的执行程序,记录在该架构体系作用下,单位时间内航空飞行试验数据吞吐量的数值变化情况,所得数据为B对照组实验样本;
5)多次核实实验数据,确认无误后,分析3组不同框架体系对于航空飞行试验数据样本的调度处理能力;
对于Windows主机而言,其在处理航空飞行试验数据时的数据吞吐量水平影响中心任务调度行为的滞后性程度,在不考虑其他干扰条件的情况下,单位时间内的数据吞吐量水平越高,就表示航空飞行试验数据的传输速率越快,框架体系对于航空飞行试验数据的调度能力也就越强,故而本次实验只需验证航空飞行试验数据的吞吐量水平,就可以确定框架体系对于航空飞行试验数据的调度能力。
4.2 结果与讨论
4.2.1 长尾延迟参数测试
长尾延迟指的是与平均延迟时间相比延迟的更高百分位数,表2反映了实验组、对照组航空飞行试验数据的长尾延迟参数。

表2 实验设备
如表2所示,实验组的长尾延迟最大值为1.11%,A对照组的长尾延迟最大值为5.14%,B对照组的长尾延迟最大值为4.29%。长尾延迟参数决定了在处理航空飞行试验数据时,中心任务调度优化架构的时延水平。当长尾延迟参数越小,可以缩短丢包后的等待时间,数据传输速度也将增快。数据传输速度的提高将显著航空飞行试验数据的调度效率。由此可见,实验组的长尾延迟参数最小,航空飞行试验数据的调度效率更好。
4.2.2 航空飞行试验数据吞吐量测试
图5反映了实验组、对照组航空飞行试验数据吞吐量的具体实验数值(规定每15 min作为一个单位时长)。

图5 航空飞行试验数据吞吐量
图5所示的实验结果展示了4个单位时长内的航空飞行试验数据吞吐量数值变化情况。
实验组:在实验组调度框架作用下,第一个单位时长内,航空飞行试验数据吞吐量已保持大幅增多的数值变化态势;第二个单位时长内,15~20 min时,实验组航空飞行试验数据吞吐量依然保持大幅增多的数值变化态势,从第20 min开始,吞吐量指标的增大幅度逐渐减小,到第二个单位时长结束,实验组吞吐量指标并未达到最大值;第35 min时,实验组航空飞行试验数据吞吐量取得最大值9.85 B/s;后续实验过程中,实验组航空飞行试验数据吞吐量开始呈现出阶梯状下降的数值变化状态,但其平均数值水平始终相对较高。
A对照组:第一个单位时长内,A对照组航空飞行试验数据吞吐量数值保持小幅增大的变化态势,第二个单位时长结束,数值变化趋势并未发生改变;第40 min时,A对照组航空飞行试验数据吞吐量取得最大值8.26 B/s,与实验组最大值相比,下降了1.59 B/s;第40~60 min,即第三个单位时长后期直至第四个单位时长结束,A对照组航空飞行试验数据吞吐量都保持连续下降的变化趋势,整体均值水平也明显小于实验组。
B对照组:第一个单位时长内,B对照组航空飞行试验数据吞吐量数值的增大趋势相对较为明显,第二个单位时长内,其吞吐量数值的增大幅度开始逐渐减小;第三个单位时长前期(第35 min),B对照组航空飞行试验数据吞吐量达到最大值5.50 B/s,与实验组最大值相比,下降了4.35 B/s;后续实验过程中,B对照组航空飞行试验数据吞吐量数值始终保持稳定,整个实验过程中,其均值水平也远低于实验组。
综上可知,基于云计算的航空飞行试验数据中心任务调度优化架构的应用,可以增大数据样本的吞吐量水平,从而避免中心任务调度行为表现出明显滞后的传输特点,这在实现航空飞行试验数据实时调度方面可以起到一定的促进性影响作用。
5 结束语
航空飞行试验数据中心任务调度优化架构的设计遵循云计算原则,在WiRo中心网络、试验数据观测器、飞行任务分配器的共同配合下,求解PSO优化度量值,从而推导云计算函数条件的基本表达式。此外,受到动态数据权限的限制作用,长尾延迟参数的取值能够符合云计算原则的约束条件,相较于基于Cesium时空三维可视化的调度机制与基于相继干扰消除和跨层并发传输的调度策略,该框架的应用确实能够解决因数据吞吐量有限而造成的中心任务调度行为明显滞后的问题,实现对航空飞行试验数据的实时调度,这也与实际应用需求相符合。
