河道测量差分信号中断补救措施探索和应用
2024-02-28汪鹤卫
汪鹤卫
(安徽省长江河道管理局,安徽 芜湖 241000)
0 引言
全球卫星导航系统(GNSS)在现实生活中的应用无处不在,目前完全组网成功的有美国 GPS、俄罗斯GLONASS 系统和中国北斗卫星导航系统。GNSS已成为当前测绘的主流手段,特别是在河道测量中的应用,大大提高了工作速度、效率和成果精度。用户接收终端从原来的单星发展到三星,从全进口向国产品牌普及。河道测量中平面定位主要采用DGPS(差分 GPS)模式,移动站接收差分信号,利用差分信号的改正参数对位置进行实时改正,达到提高定位精度的目的。GNSS 差分信号从架设基站发展到 CORS(连续运行参考站)、星站差分等,用户可以根据工作需要选择获得差分信号的不同方式。
国内外对 GNSS 在河道测量中的应用等方面研究较多。冯德鹏等[1]分析了 GPS 在水下地形测量的误差来源,提出采用后处理等方法消除误差影响;宋六华等[2]利用数学模型消减 GPS-RTK 延时和测深仪不同步的误差,提高了河道大比例测图的成果精度;李本超[3]以 GPS-RTK 技术与测深仪配合作业在内河航道测量中的具体应用为例,分析了 GNSS 在河道测量中的优缺点。但针对河道测量中差分信号中断,对采集数据的补救处理措施方面的研究和应用较少,主要采用的方法是补测或返工。因此分析 GNSS单点定位的精度、变化率,根据不同的测图比例,采用后处理手段探索 GNSS 单点定位在长江河道测量中的应用,对提高河道测量工作效率起到很好的补充作用,对其他动态测量应用具有借鉴意义。
1 DGPS 作业模式及优缺点
安徽省长江河道测量及水文测验中平面定位主要采用 DGPS 模式。差分信号的获取主要采用架设基准站和 CORS(卫星定位综合服务系统)等形式获得差分改正信号,不同的作业方式各有优缺点,具体如下:
1) 架设基准站。在已知或未知点架设基准站,通过无线电台向流动站以固定间隔发送差分改正信号,从而使流动站能够实时精准定位。自主架设基准站具有信号稳定等优点,但作业距离受电台功率及地形限制,在夏天高温情况下,电台在野外连续工作时受高温影响尤为明显。基准站外挂电台功率较大,一般情况下作业半径可达 10 km,需要配备外接天线和电台供电电瓶,设备较多;内置电台功率小,作业半径为 1~2 km,难以满足作业需要。
2) CORS。目前在安徽省长江河道测量中采用的 CORS 信号主要有 AHCORS 和千寻 2 种。
AHCORS 为测量带来了极大便利,大大提高了野外工作效率,避免架设基准站,但受 CORS基站和通信信号影响较大,原因有以下 2 点:a. AHCORS 基站分布、通信覆盖强弱等因素使 GNSS 接收机接收到的信号有时会中断,对河道动态测量影响较大,采集数据中存在单点定位现象。b. 在 2 个基站信号重复覆盖处,由于 2 个信号都比较弱,也会造成信号失锁的单点定位现象,影响成果质量,造成不必要的返工。
兼容北斗/GPS 双模的大众导航终端定位精度大部分在 3~5 m 左右,通过地基增强系统已能够将千寻位置定位精度提升到厘米级,但同样也受到北斗地基增强站分布和通信信号覆盖强度的影响,GNSS 接收机接收到的信号有时也会中断。星站差分在安徽省长江河道测量中应用较少。随着我国北斗卫星导航系统的日益完善和星站差分的应用,必将大大提高实时定位精度和测量野外作业效率。
2 GNSS 单点定位精度和变化率分析
2019 年汛后,安徽省长江河道局测绘院在长江安徽段后三峡监测项目中数据处理时发现,差分信号失锁造成单点定位现象,特别是在芜湖大拐段超过了采集数据的 15%,造成了较大范围的返工。当时采用了AHCORS 差分信号,后来采用架设基准站方式进行补测。在长江河道测量中的 DGPS 作业模式,一般根据测图比例要求,以不同固定距离间隔自动采集数据,如1 : 2 000测图采样间隔为 15 m。作业过程中,作业员很难做到始终盯着作业屏幕,差分信号中段发生的时间和位置具有不确定性,难免会影响成果质量。
2.1 GNSS 单点定位精度分析
为解决河道水下地形测量作业过程中差分信号中断给数据采集带来的质量问题,本研究探索补救措施,避免不必要的返工,提高野外作业效率。为此,2020 年初在长江安徽省段池州、铜陵、芜湖各选取了 1 处河段,对 GNSS 单点定位精度进行实验和统计分析。具体方法如下:在选取河段上相距约为 10 km(一般为当天作业的最大直径)的 2 个已知控制点上同时架设GNSS 接收天线,采用单点定位模式(无差分信号),自动采集时间间隔设置为 1 s,自动记录 1 条数据,连续 2 个半天进行数据采集。经统计分析,3 处河段上共 6 个站点的单点定位精度(指采集数据的位置与实际位置的距离,即偏距)均在 5 m 以内,每个河段 2 个站点的定位变化情况基本一致,精度统计如表1 所示。

表1 GNSS 单点定位精度统计表 m
按高精度检测中误差进行统计的计算公式为
式中:m为中误差;Δi为偏距;n为数据个数。
经计算,参与中误差计算的数据集平面位置中误差为 ±2.223 m。
2022 年 10 月,在长江池州至马鞍山段跨江水准测量中进一步布设 7 条四等跨江水准线路,采用 GPS跨江水准测量,按照 GPS C 级精度进行观测。对每条线路进行自由网平差,没有进行约束平差改正。各过江线路点通过自由网平差获得的平面位置与已知成果相比,平面定位精度均在 5 m 以内,部分点位精度统计如表2 所示,其中,∆X为纵坐标X方向偏差,∆Y为横坐标Y方向偏差,∆S为点位距离偏差。
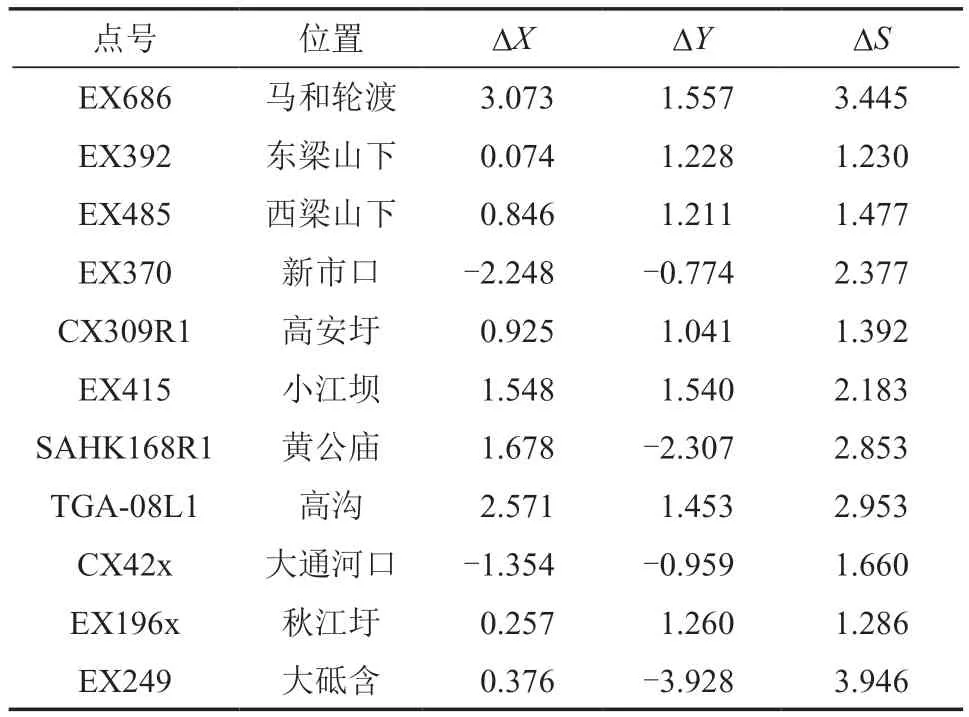
表2 GNSS 自由网平差位置精度统计表 m
按照式(1)计算表2 点位数据的平面位置中误差,按算术平均值计算,结果为 ±2.255 m。与 2020 年分析和统计的单点定位中误差相比,变化不大。
2.2 GNSS 单点定位变化频率分析
对 GNSS 单点定位变化频率进行统计分析,单个半天 3 处河段平面位置累计变化 ∆X,∆Y及偏距,与初始值相比均未超过 1.6 m。X和Y方向变化连续,没有出现突变现象,各段 2 个接收天线位置变化基本一致,相同时间段累计变化相差不超过 0.2 m。其中,芜湖大拐处半天单点定位位置变化图如图1 所示。
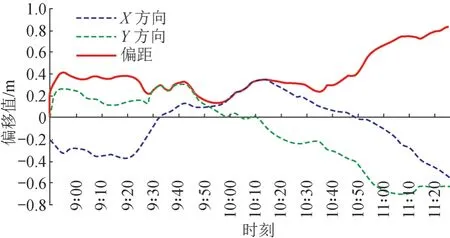
图1 芜湖大拐处半天单点定位位置变化图
可以看出,单个半天单点定位变化频率不高。依据 JTS131—2012《水运工程测量规范》规定,测图比例尺大于 1 : 5 000、小于或等于 1 : 5000,对应的定位点点位中误差限值分别为图上 1.5 和 1.0 mm。由表 1 和 2 可知,单点定位最大偏距均小于 4.0 m,对应1:5000 比例尺测图图上误差小于 0.8 mm,可以满足1:5000 及以下比例尺测图精度要求。3 个河段不同时段 GNSS 单点定位变化特征值如表3 所示,根据测量开始时的单点定位精度进行改正,对应 1 : 2 000比例尺测图图上误差小于 0.8 mm,理论上可以满足1 : 2 000 及以下比例尺测图精度要求,但对于更大比例尺测图,显然不能满足精度要求。

表3 GNSS 单点定位变化特征值统计表 m
3 单点定位后处理措施探究和应用
3.1 单点定位后处理措施探究
在 V 型和 U 型河道及大比例尺测量中[4],平面位置的定位偏差对高程影响较大,简单的初始值改正满足不了测图精度要求。GNSS 差分定位的原理是基准站发送改正数,由用户站接收并对测量结果进行改正,以获得精确的定位结果。根据 GNSS 实时高精度差分定位原理,在 2020 年 4 月芜裕河段的测量中,对单点定位后处理措施进行了探索研究。根据DGPS 工作原理,在测量船上同一铅垂线位置架设了2 台同型号 GPS 接收天线,在附近高等级控制点上架设 1 台同型号 GPS 接收天线,按单点定位模式每秒采集 1 个数据。船台导航采用 Hypack 软件,1 台接收机利用 AHCORS 信号,另 1 台接收机采用单点定位模式,分别采用人工定标和自动采集 2 种模式,进行 5 个时间段的比测,每个时间段约为 10 min。利用已知点位连续采集的数据差值,根据定位时间对船台单点定位模式数据进行逐点改正,与采用 AHCORS信号采集的数据进行比对的计算公式为
式中:Xi,Yi为改正后坐标;X0i,Y0i为改正前坐标;∆Xi,∆Yi为高级点上的实时坐标差值。
统计中剔除了个别 AHCORS 信号失锁的数据,结果表明偏距绝大部分不超过 0.3 m,最大不超过0.5 m,按式(1)进行精度统计,中误差为 ±0.22 m。为进一步分析改正后的定位精度,根据误差传播定律,按以下公式进行估算:
式中:m为改正后定位中误差;m1为 CORS 定位中误差;m2为改正后相对 CORS 定位中误差。
目前,AHCORS 的平面定位精度可达厘米级,估算中取中误差为 ±0.1 m,计算结果为 ±0.24 m。比测过程中,测量船的速度控制在 3 m/s 以内,考虑到人工定标的同步性,0.1 s 的误差对精度的影响只有0.3 m,因此单点定位经后处理改正后,定位精度达到1 m 以内。依据JTS 131—2012《水运工程测量规范》,测深定位点点位中误差限值规定,测图比例尺 1 : 500 定位点点位中误差限值可以放宽至图上 2.0 mm,对应的实际长度为 1 m。因此,单点定位经后处理改正后能够满足 1 : 500 以下比例尺测图精度要求[5]。
由于单点定位短时间内精度变化幅度较小且连续,可以根据测图比例尺大小,设定已知点位数据采集间隔,采用内插法进行数据后处理改正,改正后的成果能够满足测图精度要求。在实际应用过程中,为确保后处理后的数据可靠性,应设置检测断面进行数据验证。检测断面测深线以垂直于主测深线、均匀布设为宜,总长不小于主测深线总长的 5%,采用十字交叉法比对,测深检查线与主测深线相交处,测点在图纸上 1 mm 范围内的水深点应符合深度比对互差规定,具体内容如表4 所示。当深度比对超限点数超过参加比对总点数的 20% 时,应查明原因,合理处置。确认有系统误差,但又无法消除或改正的情形,应重测验证。

表4 深度比对互差 m
3.2 单点定位后处理措施应用
单点定位后处理措施的目的是在实际工作中进行检验和改进,解决实际困难,提高河道测量作业效率。水下地形测量具有特殊性,测点位置难以再现,在测绘成果质量评定时,主要是按照表 4 规定对水深进行检测和精度评定。
2020 年汛期,长江发生了流域性特大洪水。在芜湖大拐惠生联圩溃口堵口抢险测量中,正值大雨天气,由于测区附近 AHCORS 信号一直不太稳定,来不及购买千寻账号,比对了几种方案,决定采用AHCORS 信号结合单点定位后处理的方法进行测量。在附近控制点上架设 GPS 天线,按单点定位模式每秒采集 1 个点位数据,船台接受 AHCORS 信号,采用 Hypack 导航软件按距离自动采集数据。现场数据采集结束后,根据已知点位连续采集的数据差值,将船台 AHCORS 信号失锁的数据进行后处理改正,绘制水下地形和断面图。为堵口方案的制订和顺利堵口提供了一手基础数据,圆满完成抢险测量任务[6]。
2022 年 11 月,在马鞍山河段水下地形测量中,也采用上述方法对差分信号中断所采集的数据进行了改正,以 2022 - 0 测次为例,水下地形检测精度如表5所示:马鞍山河段基本等高距(h)为 1 m,经检测,水深测量中误差为 ±0.25 m,小于 ±h/3,满足测图精度要求;并对部分近岸岸坡较陡的地形进行了复测和断面套绘,吻合效果较好,成果精度满足相关质量要求。

表5 水下地形检测精度统计表 m
4 结语
GNSS单点定位运用快捷方便,研究单点定位后处理技术,能够在长江河道等动态测量中起到很好的补充作用,按后处理方法对单点定位数据进行改正,成果精度能够满足成果质量要求,避免返工,提高了工作效率。特别是在应急抢险测量中,可以提高应变和反应能力。
随着我国北斗卫星导航系统的日趋完善,单点定位精度会越来越高,应用前景将越来越广泛。GNSS单点定位后处理方法结合GNSS相对定位原理,可以在通信信号覆盖较差的偏远地区地质灾害、水库大坝变形等监测预警中进行运用。由于实验和应用技术的研究还不够系统全面,有待于结合实际工作进一步分析研究和改进完善。
