巴西圣保罗13号线车载ATC系统设计
2024-02-27刘浚锋
王 成,刘浚锋,刘 佳
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.北京市高速铁路运行控制系统工程技术研究中心,北京 100070)
巴西圣保罗地铁13号线是连接瓜鲁柳斯国际机场(GRU)与圣保罗市区的一条线路,是南美洲第一条机场线路,全长12.2 km,沿线设有3座车站。13号线车辆前期提供8列(64辆)城轨车辆,为8编组列车,列车的最高运营速度为90 km/h。
1 巴西圣保罗城市轨道交通概况
巴西圣保罗大都会城市轨道交通系统是南美洲最大的城市铁路系统,拥有13条线路、187个车站,总长377 km,日均客运量830万人。巴西圣保罗大都会城市轨道交通线路示意如图1所示。
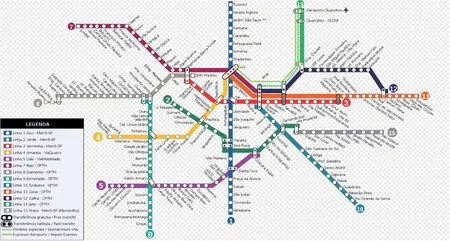
图1 巴西圣保罗大都会城市轨道交通线路示意Fig.1 Schematic diagram of urban rail transit lines in the Sao Paulo metropolitan area , Brazil
巴西圣保罗共有4家轨道交通运营公司。其中,1号线、2号线、3号线、15号线由圣保罗地铁公司(CMSP)运营。7号线、10号线、11号线、12号线、13号线由圣保罗大都会铁路公司(CPTM)运营。5号线、8号线、9号线由ViaMobilidade公司运营。4号线由ViaQuatro公司运营。6号线和17号线正在建设。
1号线、2号线采用阿尔斯通的Urbalis CBTC信号系统。4号线采用西门子的Trainguard MT CBTC信号系统。5号线、15号线采用庞巴迪的CITYFLO 650 CBTC信号系统。3号线、7号线、8号线、9号线、10号线、11号线、12号线、13号线采用自动闭塞信号系统。其中,3号线正在进行信号系统改造,采用阿尔斯通的Urbalis CBTC信号系统。6号线和17号线正在建设,6号线采用日本SPARCS CBTC信号系统,17号线采用泰雷兹SelTrac CBTC信号系统。
2 巴西圣保罗13号线信号系统结构
巴西圣保罗13号线信号系统是一种基于轨道电路的固定闭塞信号系统。系统结构如图2所示,系统主要由3部分构成:轨旁设备、地面设备、车载设备。轨旁设备包含信号机、转辙机、电子信标等基础设备。地面设备包含轨道电路、联锁、地面控制中心。轨道电路实现轨道占用检测和轨道编码的发送功能;联锁根据调度员办理列车进路,检查轨道占用,控制信号机、转辙机和轨道编码信息;地面控制中心通过无线数据给车载ATO发送运营命令。车载设备主要包含车载ATC和车载ATO。车载ATC是列车安全防护的核心,依据轨道电路信息、电子信标信息、测速测距等信息实现列车的安全防护,车载ATO实现自动驾驶功能。巴西圣保罗7号线、8号线、9号线、10号线、11号线、12号线均采用与13号线相同制式的信号系统,并且各个线路之间都具备互联互通条件,列车可以在不同线路之间混跑。

图2 巴西圣保罗13号线信号系统结构Fig.2 Signal system structure of Sao Paulo Line 13, Brazil
3 巴西圣保罗13号线车载ATC信号系统
车载ATC信号系统通过霍尔速度传感器+加速度计计算列车的速度和位置。通过车载电子信标读取器获取地面电子信标的定位信息,对列车的位置进行校正。通过车载轨道电路读取器获取轨道电路的移动授权和限速信息,车载设备根据测速测距单元计算的速度和位置信息及地面的限速信息进行列车速度监控。通过无线通信获取地面控制中心的运营命令,实现列车自动驾驶功能。
3.1 车载ATC系统组成
车载ATC系统信号设备包括:车载ATC主机、车载DMI、车载轨道电路读取器(Track Circuit Reader,TCR)、车载电子信标读取器、无线通信单元、速度传感器和加速度计。其组成如图3所示。

图3 车载ATC系统设备组成Fig.3 Equipment composition of on-board ATC system
车载ATC主机实现车载ATC应用功能,包含测速测距功能、列车定位功能、速度监控功能、制动率监控功能和事件记录功能等。
车载DMI主要提供给司机速度控制曲线显示、图标信息显示、声音报警等信息。
车载电子标签读取器读取并解析地面电子标签中的数据信息,用于车载ATC主机实现列车定位功能。
车载TCR读取解析地面轨道电路中的数据信息,车载ATC主机通过车载TCR的数据信息实时计算当前列车的控制速度,实现列车的速度监控。
车载无线通信单元接收地面控制中心数据信息,车载ATO通过无线通信单元的数据信息实现控车等级、跳停、扣车等运营命令。
车载ATC通过速度传感器和加速度计计算列车速度和距离信息,通过加速度计获取列车当前的加速度或减速度,与期望列车制动率进行比较,实现制动力监控功能。
3.2 驾驶模式
车载ATC信号系统具备8种操作模式:未上钥匙模式、ATO主动操作模式、主动操作模式、继续限制速度操作模式、待机操作模式、操作性限制操作模式、有限隔离操作模式和完全隔离操作模式。
自动驾驶模式(AM),车载ATO在车载ATC的监控下,控制列车的启动、加速、巡航、惰行、制动、精确停车的模式。在AM模式下,车载ATC完成与SM模式下相同的监控。ATO在站台区停准后能够完成开关门功能。
完全监控模式(SM),司机通过模式选择开关来启用主动操作模式。在主动操作模式下,车载ATC系统应对列车安全运行进行防护。主动操作模式具备功能:获取并解析地面轨道电路中的限速代码,根据线路状况,实现列车定位,实现速度防护;检查列车的有效制动力;将车载ATC运营状态显示给司机。
继续限制速度操作模式(VR),用于线路限速为0 km/h(车载ATC接收到VR限速码)的线路,司机必须靠目视操作。当车载ATC接收到零限速编码(VR限速编码),当列车速度小于或等于25 km/h时,车载ATC允许使用继续限制速度开关,按照继续限制操作模式的功能要求行驶。当车载ATC具备转换到VR模式条件时,需通过DMI显示图标提示司机。继续限制速度操作模式最大允许速度为25 km/h。
待机操作模式(SB),待机操作模式用于在非信号线路(站场)以受限速度行驶列车。除了不需要周期识别,与继续限制速度模式类似。该功能必须由高电平VMA1编码(大于8 A的线路电流)激活,编码为180 PPM,前提是列车速度低于某阈值并借助确认键。该模式下,安全必须由司机确保,靠视线操作列车,遵守线路前方信号。
操作性限制操作模式(RO),通过将操作模式开关旋转至操作限制位来激活操作性限制操作模式。ATC设备必须自动把列车的速度限制在推进限制器限制速度(50 km/h)以下。当接收地面线路代码发生故障时,司机得到地面CCO许可使用此模式运行。该模式下,安全必须由司机确保,靠视线操作列车,遵守线路前方信号。
有限隔离操作模式(LIS),司机需将模式选择开关打到隔离位,且推进限制器开关打到正常位,车载ATC进入有限隔离操作模式。该模式下,车载设备不能施加列车制动。如果列车的速度超过ATC允许速度,车载设备必须输出切断牵引力。当列车速度低于允许速度的90%时,恢复列车牵引。该操作模式只需在车载设备故障情况下使用,不能在正常时使用。该模式下,安全必须由司机确保,靠视线操作列车,遵守线路前方信号。
完全隔离操作模式(UIS),司机需将模式选择开关打到隔离位,且推进限制器开关打到隔离位,车载ATC进入完全隔离操作模式。该模式下,安全必须由司机确保,靠视线操作列车,遵守线路前方信号。
3.3 车载ATC功能
1)轨道电路接收和处理功能
基于巴西圣保罗CPTM公司地铁的三轨线路(具有1 m 和1.6 m 混合轨距的轨道),列车运行在混合轨距线路上时,车载ATC系统通过车载TCR接收和解析定制载频信息的低频信号(重叠保护信号),进而实现混合三轨距的轨道占用检查,以防止事故的发生。原理示意如图4所示。
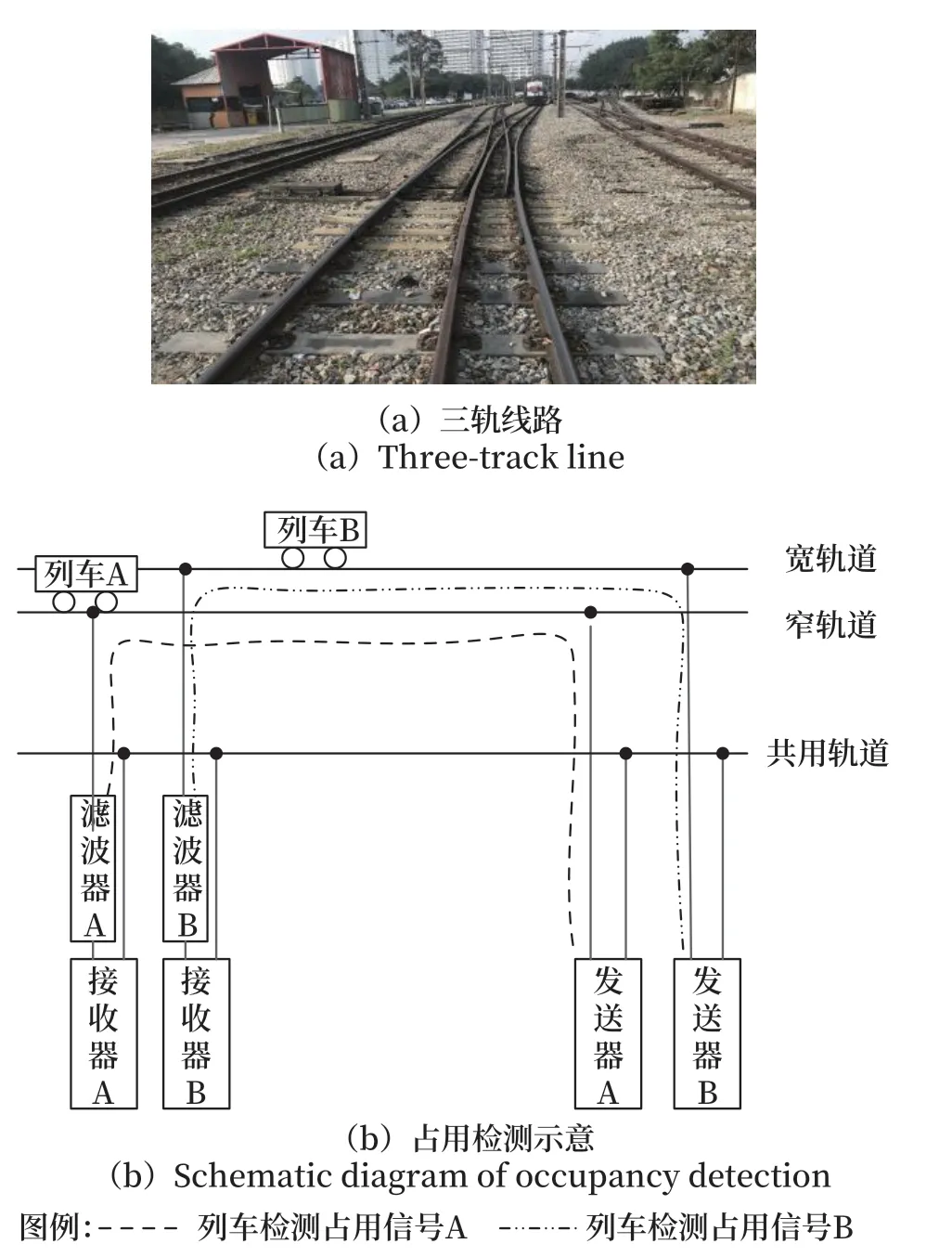
图4 三轨线路及占用检测示意Fig.4 Schematic diagram of the three-track line and occupancy detection
基于三轨线路的重叠保护信号的轨道占用检测技术是基于混合轨距的轨道的一种信号控制技术。车载TCR通过同时解析轨道电路中两种载频下的低频信号,获取不同轨距下轨道电路的占用情况,并将占用情况发送给车载ATC系统,车载ATC系统根据地面轨道电路占用情况控制列车运行。
在有重叠保护信号的区段,车载ATC系统在接收使用有效低频信号前,需检测重叠保护信号。如果车载ATC系统接收到有效的低频信号,但未接收到重叠保护信号,此时车载ATC系统认为前方三轨有占用,需将线路限制速度设置为0 km/h,控制列车停车。如果车载ATC系统接收到有效的低频信号,同时接收到重叠保护信号,车载ATC系统需按照轨道电路的低频信号计算限速。
2)速度监控功能
不同于CTCS/ETCS/CBTC信号系统的闭口速度监控方式,巴西圣保罗13号线信号系统的速度监控是超前速度监控。超前速度监控是将本闭塞分区的允许速度作为本闭塞分区的目标速度,在进入本闭塞分区时对列车速度进行检查,并在离开本闭塞分区前将列车速度降低至该目标速度以下。速度控制原理如图5所示。

图5 速度控制原理Fig.5 Speed control principle
车载ATC工作在SM模式和AM模式时,正常接收地面轨道电路发送的允许速度码信息,并且按照相应的允许速度进行速度监控。
列车运行过程中,列车从允许速度高的轨道区段进入到允许速度低的轨道区段(例如从VMA1进入VMA2)时,车载ATC需要考虑运营的安全性和可用性,既需要对降速进行防护又需要防止降速过程中发生不必要的紧急制动影响运营,根据车辆制动性能和现场试验调试,提出以下的设计总体要求。
第一,根据车辆制动性能和线路条件,计算当前列车速度防护曲线。
第二,当车载ATC接收到的轨道电路允许速度由低限速变化到高限速时,车载ATC计算的速度防护曲线直接升高。车载ATC按照速度防护曲线对列车速度进行防护。
第三,当车载ATC接收到的轨道电路允许速度由高限速变化到低限速时,车载ATC根据车辆制动性能和线路条件计算列车降速曲线。同时,车载ATC主动输出切除牵引和最大常用制动,直到降速过程结束。
第四,在降速过程中,基于速度防护曲线,车载ATC对列车速度进行防护,车载ATC速度大于等于速度防护曲线的速度时,车载ATC应施加制动进行防护。
3)制动力监控功能
车载ATC设备需要监控列车制动力,如果车载ATC设备检测到列车最大常用制动或紧急制动制动力不足,车载ATC需输出紧急制动命令直到列车停稳。需向司机发出报警信息。
车载ATC设备监控到列车紧急制动力不足,为保证列车的安全停车距离,车载ATC设备必须在收到的最大限制速度(限制速度除外)基础上降低一定百分比形成最大允许速度。第一次发生紧急制动力不足时最大允许速度降低20%,连续两次发生紧急制动力不足时最大允许速度降低50%。
当车载ATC连续三次检测到列车紧急制动力不足时,需提示司机本列车需要回库检修。
巴西圣保罗13号线项目没有线路坡度数据,车载ATC仅通过加速度计进行列车制动力监控。当列车在平坡运动时,列车不受线路坡度影响,列车制动力为F=ma加。当列车在上坡运动过程中,当列车没有施加牵引力且没有施加制动力的时候,列车处于减速向上运动的状态。当前加速度计测量的加速度为a加=0 m/s2。当列车施加最大常用制动或紧急制动时,列车受到前进方向上的制动力F。列车制动力为F=ma加。当列车在下坡运动过程中,当列车没有施加牵引力且没有施加制动力的时候,列车处于加速向下运动的状态。当前加速度计测量的加速度为a加=0 m/s2。当列车施加最大常用制动或紧急制动时,列车受到前进方向上的制动力F。列车制动力为F=ma加。
通过以上的分析,列车运动方向上的制动力总为F=ma加,列车的制动力通过加速度计可以计算得到,与线路坡度无关。
4)自动驾驶功能
车载ATC具备车-地无线通信功能。车载ATC在定位状态时,列车距前方站台距离小于50 m(可配置),车载ATC应主动与地面控制中心建立无线通信,获取地面控制中心的跳停、扣车、开门、关门和运行等级等控制命令。当列车离开后方站台距离大于50 m(可配置),车载ATC应主动与地面控制中心断开无线通信。
车载ATC系统根据当前轨道的线路限速信息,计算自动驾驶的控车曲线,最终生成控制命令输出至车辆,实现列车速度的自动调整。同时,车载ATC系统响应地面控制中心的跳停、扣车等控制命令。车载ATC系统使用安装在预定位置的地面电子信标来校正列车位置,实现列车站台精确停车。
列车在站台停稳后,且满足列车平台对中条件,车载ATC根据地面电子信标开门侧给出门允许。如果车载ATC输出门允许,且收到地面控制中心的开门命令,且车载ATC在此站未执行过开门命令,车载ATC输出相应侧开门指令。车载ATC接收到地面控制中心的关门命令时,车载ATC应当按照要求关闭车门。
4 结束语
本文对巴西圣保罗城市轨道交通进行了描述,详细介绍了巴西圣保罗地铁13号线信号系统。针对巴西圣保罗地铁13号线的车载ATC信号系统,详细分析了驾驶模式、轨道电路接收和处理功能、速度监控功能、制动力监控功能,并根据系统功能进行了功能设计,得出了模式控制、轨道电路接收和处理功能、速度监控功能、制动力监控功能设计方案。