水面无人艇路径规划研究现状
2024-02-27陈羽褚天仁
陈羽 褚天仁
摘 要:进入人工智能化时代,水面无人艇成为研究热点,路径规划算法是实现水面无人艇智能化的重要部分。该文针对水面无人艇对环境信息的获取程度,分别从全局路径规划以及动态局部路径规划综述当前路径规划方面的最新研究成果,总结学术界对规划路径算法的切入点。最后讨论目前无人艇在路径规划上的挑战以及对未来无人艇实现智能化的展望。
关键词:无人艇;路径规划;局部路径规划;自主航行;人工智能
中图分类号:U664.82 文献标志码:A 文章编号:2095-2945(2024)06-0084-04
Abstract: In the era of artificial intelligence, the surface unmanned vehicle has become a research hotspot, and the path planning algorithm is an important part of realizing the intelligence of the surface unmanned vehicle. Aiming at the degree of acquisition of environmental information by surface unmanned craft, this paper summarizes the latest research results of current path planning from global path planning and dynamic local path planning, and summarizes the entry point of path planning algorithm in academic circles. Finally, the challenges of path planning of unmanned vehicles at present and the prospect of intelligent unmanned vehicles in the future are discussed.
Keywords: unmanned craft; path planning; local path planning; autonomous navigation; artificial intelligence
无人艇(Unmanned Surface Vehicle,简称USV)是一种无人驾驶的水面船舶,通过采用无线通信、传感器和自主导航技术实现航行和任务执行。无人艇通常被用于海洋科学研究、海洋资源勘测、海底地形测绘、环境监测、军事侦察和救援等領域。无人艇可以根据预设的任务规划自主航行路径,使用雷达、声纳、相机等传感器收集环境信息,并将这些数据通过无线通信传输回地面或其他控制站。无人艇具有较强的适应性和灵活性,能够在恶劣的海洋环境中执行任务,如海况恶劣、危险区域或远离陆地。无人艇技术的发展为海洋领域带来了更高效、更安全的数据采集和任务执行方式。通过减少人员风险、提高工作效率和降低成本,无人艇在未来将扮演越来越重要的角色[1]。
路径规划是无人艇实现自主导航的关键环节之一,其确定了无人艇的航行路径,使其能够安全、高效地到达目标地点执行任务。在过去的几年里,无人艇路径规划研究取得了显著进展,本文将对相关研究进行综述。
1 全局路径规划算法
1.1 传统方法
基于图论的算法:这类算法通过将环境建模为图形结构,采用图论中的算法进行路径规划。其中最常用的算法是Dijkstra算法和A算法。Dijkstra算法用于寻找最短路径,适用于静态环境。A算法结合了启发式信息,能够在较快时间内找到较优路径[2]。
基于启发式搜索的算法:通过设定启发式函数来评估路径的质量搜索最优路径。其中包括遗传算法、模拟退火算法等。遗传算法基于生物进化思想,通过基因编码和交叉变异的操作来搜索最优解。模拟退火算法则模拟金属退火过程,通过随机搜索来找到全局最优解[3]。
基于规则的方法:根据预先设定的规则和约束来进行路径规划。例如可以设定规定无人艇在遇到障碍物时绕行或避让。这种方法适用于简单的环境和任务要求,但对于复杂和动态环境的适应性较差[4]。
传统路径规划方法通常需要依赖事先建立的环境地图和目标位置信息。对于复杂和动态环境,这些方法的适应性和鲁棒性可能较差。近年来,随着深度学习和强化学习等技术的发展,越来越多的研究开始采用基于学习的方法来进行无人艇路径规划。这些方法通过模型训练和自主学习,使无人艇能够在未知环境中实现自主导航和路径规划。
1.2 智能路径规划算法
智能路径规划算法主要是指基于人工智能和机器学习技术的路径规划方法。下面列举了几种常见的智能全局路径规划算法。
1.2.1 遗传算法
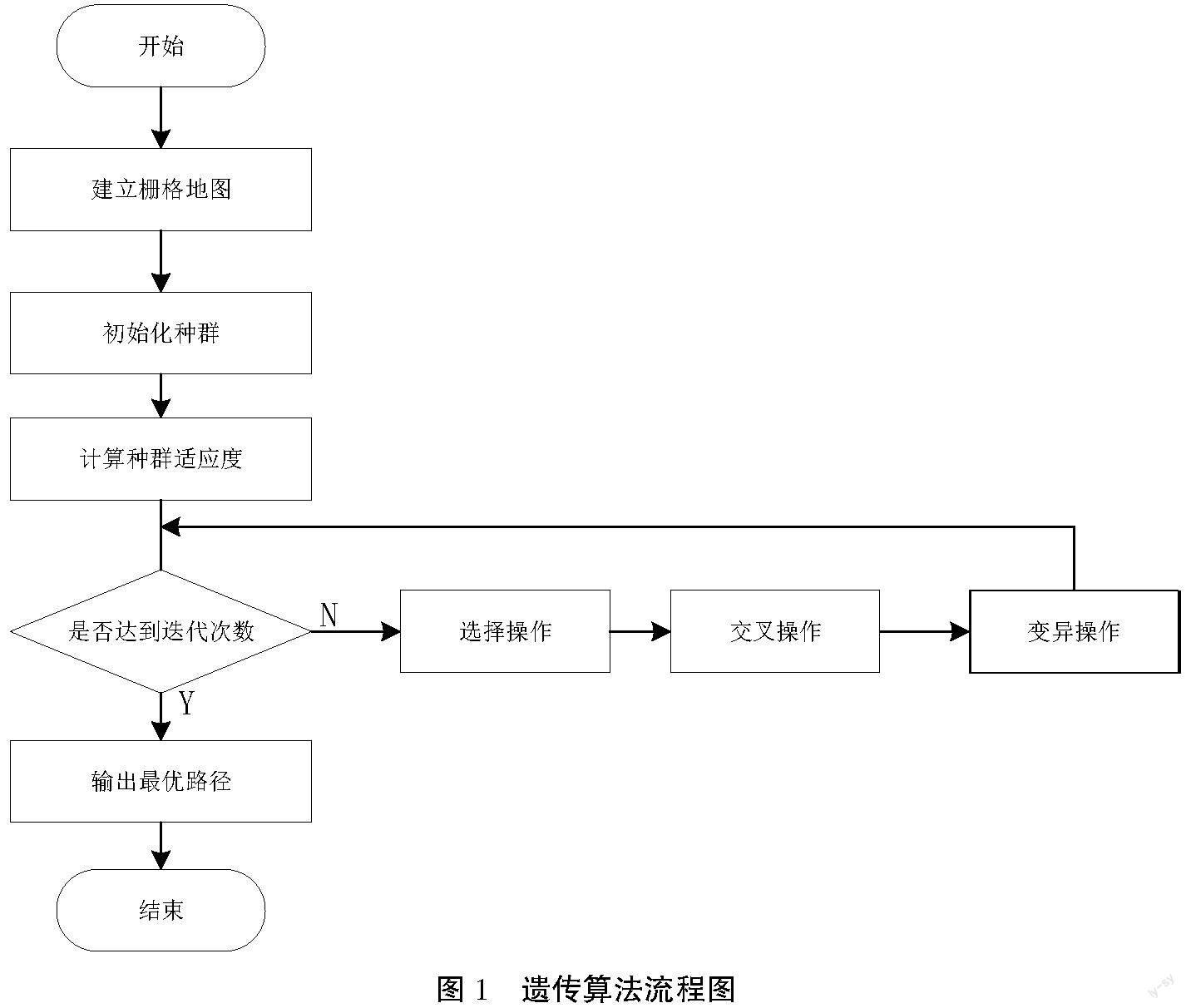
遗传算法(Genetic Algorithm)是一种模拟生物进化过程的优化算法。在路径规划中,可以通过基因编码和遗传操作(如交叉、变异)来搜索最优路径。遗传算法适用于多目标优化问题和复杂的搜索空间,具有全局搜索能力[5]。遗传算法流程如图1所示。
杨琛等[6]提出基于遗传算法优化PID控制器的方法来解决无人艇路径跟踪在环境未知扰动以及模型参数难以确定的问题;胡红波等[7]提出免疫遗传算法有效提高无人艇任务分配方法的寻优速度以及分配效果;刘源等[8]设计了基于双惩罚函数的遗传算法,有效解决无人艇在风浪留等外界复杂环境干扰波动下遇到的问题。
1.2.2 粒子群优化算法
粒子群优化算法(Particle Swarm Optimization)是一种基于群体智能的优化算法。在路径规划中,可以将路径视为粒子的位置,在搜索空间中进行迭代优化,以找到最优路径。粒子群优化算法具有快速收敛和全局搜索的能力[9]。
刘文霞等[10]提出量子粒子群优化算法,通过引入动态控制参数减少了路径长度,提高了路径平滑度和安全性;林法君等[11]提出动态权重的粒子群算法,建立栅格化的障碍区海域模型,提高寻址的速度和安全性。
需要注意的是,智能路径规划算法的选择应根据具体情况和任务需求。不同的算法适用于不同的问题和环境。此外,还可以通过组合多种算法或结合传统规划方法来提高路径规划的效果和鲁棒性。
1.2.3 蚁群算法
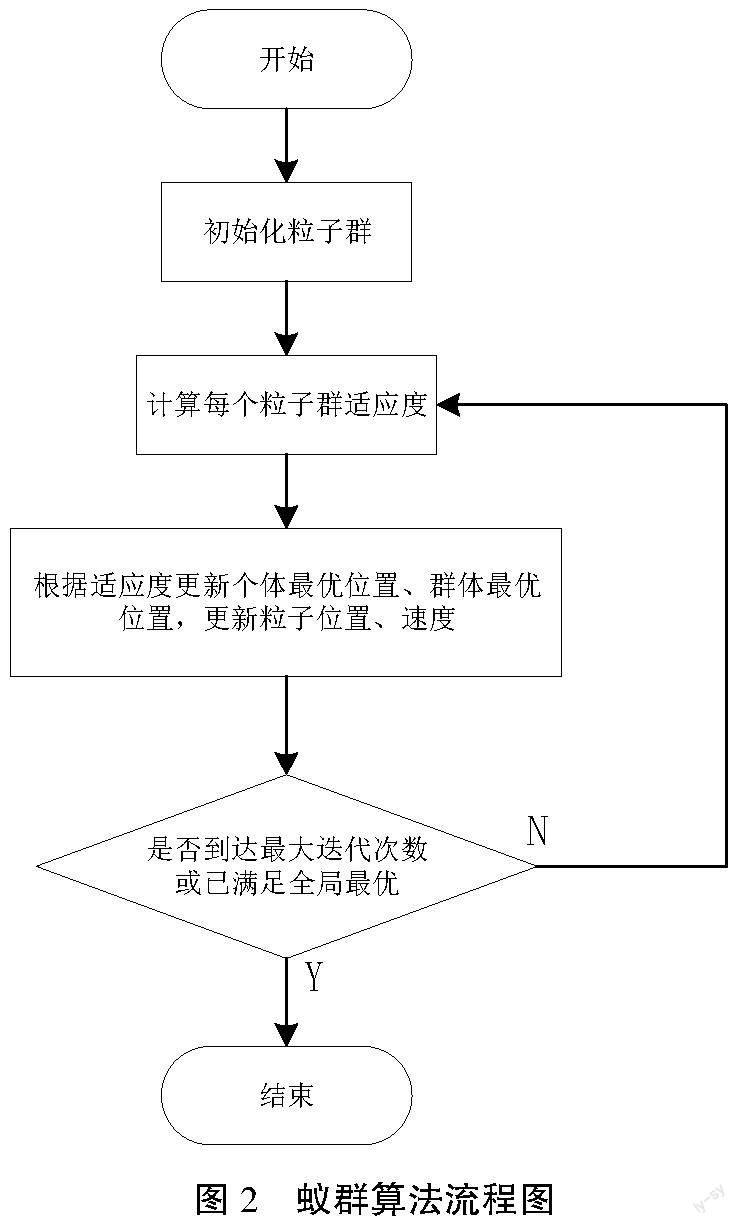
蚁群算法(Ant Colony Optimization)是受到蚂蚁觅食行为启发的一种启发式优化算法。在路径规划中,可以将无人艇视为蚂蚁,通过模拟蚂蚁释放信息素和选择路径的行为来搜索最优路径。蚁群算法适用于解决动态环境下的路径规划问题[12]。蚁群算法流程如图2所示。
沈智鹏等[13]结合无人帆船在特定环境下的运动状态提出改进自适应蚁群算法,优化启发函数,加快了算法收敛速度;孙功武等[14]解决死锁情况发生并改进启发函数提高算法的收敛速度和精度。
2 局部路径规划
无人艇局部路径规划算法主要是针对在复杂和动态环境中进行实时避障和调整的问题。下面列举了几种常见的无人艇局部路径规划算法。
2.1 动态窗口法
动态窗口法(Dynamic Window Approach)通过在速度和转向空间中定义一个窗口,根据无人艇的运动约束和感知信息,动态地选择合适的速度和转向,以避免障碍物并达到目标点。该方法适用于快速计算和实时更新路径规划的情况。
高宇等[15]结合无人艇运动学参数考虑了避碰规则以及障碍物因子,提高了算法的避障能力;谭智坤等[16]将动态窗口法和速度障碍法相融合,提高了无人艇的动态避障调节能力。
2.2 人工势场法
人工势场法(Artificial Potential Field Approach)将无人艇视为一个粒子,给每个目标点和障碍物分配一个势场,无人艇通过计算力的合成来规划路径。该方法能够适应复杂的环境和避免障碍物,但容易出现局部最小值和振荡的问题。
李家林等[17]引入阈值解决与障碍物的碰撞问题,并结合模糊远近界点的概念解决目标不可到达问题;张丰等[18]通过修改斥力函数以及施加船向角和增加随机扰动的方法,有效解决路径振荡和无法到达目标点的问题。
2.3 模型预测控制法
模型预测控制方法(Model Predictive Control)通过建立动力学模型和环境模型,利用模型进行预测,然后根据最优控制策略规划路径[19]。该方法可以考虑动态约束和目标需求,适用于复杂环境和高精度控制。
2.4 强化学习法
强化学习法(Reinforcement Learning)也可以用于局部路径规划。通过与环境交互,智能体可以学习在局部环境中选择动作以达到目标。这种方法可以自动学习和优化路径规划策略,适用于动态和未知环境[20]。
夏家伟等[21]基于多智能体深度强化学习的分布式控制方法,采用集中式训练和分布式执行的多智能体近端策略优化(MAPPO)强化学习架构使得无人艇在不同期望队形、不同集群数量和部分智能体失效等场景中能够成功完成快速集结;苏震等[22]设计了协同围捕环境下深度强化学习算法的状态信息、动作信息、神经网络结构和奖励函数实现了无人艇协同围捕工作,完成无人艇集群博弈对抗。
需要根据具体的任务需求和环境特点选择合适的局部路径规划算法。通常情况下,局部路径规划算法会与全局路径规划算法结合使用,全局路径规划负责确定目标点和大致路径,而局部路径规划则负责实时调整和避障。结合多种算法和技术可以提高无人艇的路径规划效果和安全性。
3 挑战与未来发展
3.1 无人艇路径规划挑战
由于无人艇作业环境的复杂性和突发性较高,对无人艇进行安全路径规划的挑战也是艰辛的。在进行路径规划时,需要从多方面考虑,进而保障无人艇能够安全到达目的地,避免造成经济损失。
1)环境:路径规划需要考虑水域的地形、障碍物、海流和风力等环境因素。传感器数据的准确性和实时性对路径规划的影响也不可忽视。
2)任务需求:不同的任务需求对路径规划有不同的要求,如最短路径、最优路径、多目标路径等。
3)安全性:安全是无人艇路径规划的重要考虑因素,包括避免与其他船只或障碍物发生碰撞,以及在突发情况下能够及时应对。
3.2 未来展望
通过总结无人艇路径规划的技术算法,综合当前路径规划的发展现状,现存在以下几种发展难点和重点。
1)多目标优化:無人艇路径规划中的多目标优化是一个具有挑战性的问题,需要权衡不同目标之间的关系,如航行时间、能源消耗、任务完成率等。
2)动态环境下的路径规划:在实际应用中,水域环境可能会发生变化,如海流的变化、新的障碍物出现等。因此,如何实现在动态环境下的实时路径规划是一个需要解决的问题。
3)集群协同:多艘无人艇之间的协同和合作是未来研究的重点,可以通过路径规划算法实现艇群的分工与协同,提高整体效率。
4 结论
无人艇路径规划是无人艇自主导航的重要环节。传统方法和强化学习方法是目前研究中常用的路径规划方法。然而,仍然存在挑战,如多目标优化和动态环境下的路径规划。未来的发展方向包括多目标优化、动态环境下的路径规划以及集群协同等方面的研究,这将进一步推动无人艇技术的应用和发展。
参考文献:
[1] 马鸣,古楠,董佳伟,等.基于电子海图的无人艇集群区域覆盖路径规划[J/OL].中国舰船研究:1-9[2023-08-17].
[2] 应泽光,何琪.基于改进A*算法的无人艇复杂水域路径规划[J].机电技术,2022(5):33-35.
[3] Sensor Research:Data from Qingdao University of Science and Technology Provide New Insights into Sensor Research (Greedy Mechanism Based Particle Swarm Optimization for Path Planning Problem of an Unmanned Surface Vehicle)[J]. Journal of Engineering,2019.
[4] 陈锐.复杂海洋环境下的水面无人艇智能路径规划[D].昆明:昆明理工大学,2022.
[5] 赵嘉祺.基于改进遗传算法的水面无人艇避障问题研究[D].天津:天津理工大学,2019.
[6] 杨琛,蒋鑫,白波,等.遗传算法优化PID控制器参数的路径跟踪控制[J].制造业自动化,2022,44(5):78-81.
[7] 胡红波,曹璐.基于免疫遗传算法的无人艇任务分配研究[J].舰船电子工程,2022,42(11):25-27,73.
[8] 刘源,顾因,李夏.复杂海况下水面无人艇路径算法优化设计[J].军事交通学院学报,2021,23(1):83-87.
[9] 薛敏,徐海成,王硕.基于粒子群优化算法的无人艇路径规划[J].中国科技信息,2018(24):69-70.
[10] 刘文霞,王荣杰,郜怀通,等.基于量子粒子群算法的无人水面艇路径规划[J].集美大学学报(自然科学版),2023,28(1):34-40.
[11] 林法君,李焰.基于改进粒子群算法的水面无人艇全局路径规划[J].舰船电子工程,2022,42(8):59-63,73.
[12] 敖邦乾,杨莎,叶振环.改进蚁群算法水面无人艇平滑路径规划[J].控制理论与应用,2021,38(7):1006-1014.
[13] 沈智鹏,丁文娜,刘雨宸,等.基于改进自适应蚁群算法的无人帆船路径规划[J].哈尔滨工程大学学报,2023,44(6):969-976.
[14] 孙功武,苏义鑫,顾轶超,等.基于改进蚁群算法的水面无人艇路径规划[J].控制与决策,2021,36(4):847-856.
[15] 高宇,赵嵩郢.基于动态窗口法的無人艇局部路径规划[J].船电技术,2022,42(7):50-54.
[16] 谭智坤,张隆辉,刘正锋,等.融合改进动态窗口法与速度障碍法的无人船局部路径规划[J].船舶力学,2023,27(3):311-322.
[17] 李家林,张建强,李春来.基于优化人工势场法的无人艇局部路径规划[J].舰船科学技术,2022,44(16):69-73.
[18] 张丰,廖卫强,乔中飞,等.基于改进人工势场法的无人船路径规划[J].集美大学学报(自然科学版),2023,28(2):150-155.
[19] 封佳祥.水面无人艇智能路径规划技术研究[D].哈尔滨:哈尔滨工程大学,2020.
[20] 黄海威.无人驾驶车辆路径规划及跟踪控制研究[D].邯郸:河北工程大学,2022.
[21] 夏家伟,刘志坤,朱旭芳,等.基于多智能体强化学习的无人艇集群集结方法[J].北京航空航天大学学报,2023,49(12):3365-3376.
[22] 苏震,张钊,陈聪,等.基于深度强化学习的无人艇集群博弈对抗[J].兵器装备工程学报,2022,43(9):9-14.
