基于数字孪生的电梯制动性能预测及评价
2024-02-26郭青源李菊峰牛卫飞
郭青源 王 璇 李菊峰 杨 阳 牛卫飞
(1.天津市特种设备监督检验技术研究院 天津 300192)
(2.国家市场监管重点实验室(特种设备数字孪生共性技术) 天津 300192)
随着我国城镇化进程的加快,高层建筑迅猛发展,而电梯是高层建筑中不可缺少的设备。截至2022年底,全国电梯总量达到964.46万台[1],使用15年以上的老旧电梯已达73.68万台[2]。根据《特种设备典型事故案例集》统计,坠梯、冲顶和剪切占电梯伤亡非人为事故的82%,而电梯制动性能是造成上述现象的根本原因[3]。如何对电梯制动性能进行精准预测,是保证民生安全和国家垂直交通系统平稳运行的巨大挑战。
制动性能的可靠性是保证电梯安全运行的前提。当前制动性能监测方法主要分为物理方法和机器学习方法,物理方法主要是传统制动器厂家广泛采用定检和抽检的检测方法来确保制动器的正常运行。机器学习方法主要是神经网络、支持向量机、极限学习机等。由于神经网络可以很好地挖掘训练数据中的线性和非线性之间的关系以及深层特征,它们通常具有更好的预测性能。根据相关文献对长期短期记忆(LSTM)和其他预测模型进行测试对比,表明LSTM在长期预测和短期预测方面均优于其他预测模型[4-6]。由于电梯属于长生命周期运转设备,LSTM存在模型复杂性和训练时间长的问题,因此对大量的多维数据优化处理可以增强LSTM的训练效果。基于多维数据提出基于主成分分析(PCA)的方法,采用PCA对采集到的历史运行数据进行特征提取,并对提取后的特征值进行归一化处理,从而得到优化的数据集[7]。为了提高制动器性能预测的精度,需要对原始数据的噪声进行滤波处理,因为多参量因素序列通常是非平稳的,直接对原始数据预测可能会对结果造成较大的误差,分解原始序列的信号可以提升预测精度以及降低数据运算的复杂程度。
基于上述特点,为了解决传统制动性能预测模型的特征不准确和收敛速度慢的问题,提出基于数字孪生的电梯制动性能预测及评价。基于数字孪生五维模型的概念,建立物理实体、虚拟实体、孪生数据、应用服务以及连接交互的5个维度[8]。在这5个维度的基础上借助数据驱动的方法对物理实体的历史数据和实时数据进行分析与挖掘,从而提出了基于PCARF-LSTM(主成分分析-随机森林-长期短期记忆)的预测融合算法对物理实体进行高精度模拟和预测,以提高制动性能的预测精度。本文以蓝光曳引机为研究对象,基于电梯制动器的失效模式搭建了实验平台,结合多参量传感器监测装置来探究对电梯数字孪生制动性能的全生命周期监管。
1 电梯实体的搭建
1.1 电梯失效模式的分析
电梯实验平台的搭建主要研究电梯的运行状态从健康逐渐衰减到故障状态下的变化规律。传统的失效故障监测方法,主要是在电梯正常工况运行下布置相关传感器进行实时数据的监测以及故障预警,但是由于电梯全生命周期较长,实时监测的数据达到海量,难以实时判断电梯全生命周期的健康状态。故本文设计并搭建了电梯失效实验平台,实验平台主要根据模拟3种故障场景组合而成,是通过布置步进电机、拉杆、拉线以及蜗轮、蜗杆、旋转台等多类模块组合而成的控制平台,在控制平台的基础上布置振动、电流、电压、编码器以及限位器等多类传感器。基于设备的失效机理,通过实验平台来加快设备制动性能衰减的时间,从而达到在不同工作模式下,对电梯制动性能进行分析研究的目的。如图1所示,图1(a)为蓝光曳引机,图1(b)为电梯失效实验平台。

图1 电梯实验平台结构示意图
如图2所示,本文设计的实验平台主要由蓝光曳引机、基于海普蒙特的变频器与PLC控制柜组成。首先通过PLC对3个不同的故障模式对应组件进行编程,保证机构运转性能正常;然后通过程序调节设备的模拟量、电流值、电压值和制动力矩,使曳引机性能逐渐失效,通过失效过程中的多维度的物理量,来探究制动性能的变化。本文通过不间断地模拟故障场景,来保证在多种复杂工况条件下采集到电梯在多种失效模式下的全生命周期的参数信息。

图2 电梯实验台示意图
电梯在工作过程中发生失效的场景分为制动器单侧卡阻、单臂动作和制动力不足,主要原因是制动弹簧压力过大、制动气隙过大、维持电流过小、开闸电压过低等,因此本文主要针对以上失效原因进行研究分析,见表1。
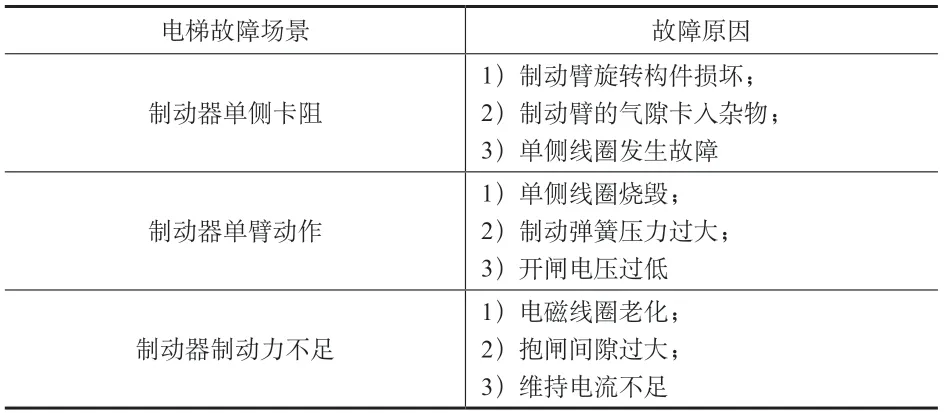
表1 电梯失效场景及故障原因
1.2 基于实体动态感知的智能监测系统设计
电梯智能监测系统即物理实体的动态感知,主要由传感器组网、可编程化的物联网网关以及服务器组成,整体的动态感知框架如图3所示。将电流传感器、电压传感器、振动加速度传感器和变频器接入电梯控制回路中,监测电梯制动线圈电流、振动幅值、制动力、开关门状态、电梯运行层数。将以上多路信号与控制柜中的PLC系统相连,并将PLC设置为从机,将物联网网关设置为主机,使用主机内部集成开发的Node-Red(基于浏览器的流程编辑器)实时采集设备静动态数据,从而建立数字孪生的感知层。

图3 物理实体的动态感知框架
依据电梯数字孪生传输层中的数据通信技术,通过物联网网关将感知层采集的动态数据采用MQTT(消息队列遥测传输协议)、Zigbee(紫蜂)、4G/5G等相关传输方式反馈至电梯数字孪生的平台层,其中传输层的用途还包括电梯虚拟实体和物理实体之间的双向映射、动态交互与实体连接。
2 电梯数字孪生体的搭建
电梯数字孪生体主要包括电梯运营维护数据库、电梯诊断知识库、基于COMSOL(多物理场仿真软件)制动线圈的电磁力仿真模型以及基于ADAMS(机械系统动力学自动分析)的动力学模型。
电梯运营维护数据库包含电梯的设计信息、环境的温度/湿度、维修信息、施工单位信息等,为电梯后期运营保养提供便利。电梯诊断知识库依据采集的大量动态历史数据,基于收集浅层知识和分析深层知识,获取制动器的领域知识,从而搭建故障模式数据库、故障机理库、维修策略库,为后期数据挖掘与故障分析建立基础。
COMSOL制动线圈的电磁力仿真分析,针对制动器的制动线圈,从电磁力学的角度,建立基于动铁芯动作响应的时间模型。根据制动力矩不足、制动响应时间超时、释放响应时间超时、制动器不抱闸和制动器不松闸的5种故障模式来建立故障机理[9]。基于三维软件搭建制动线圈的三维模型,并将其导入COMSOL进行电磁仿真分析,并定义线圈的材料,设定其边界条件,对其进行网格划分与求解,通过后处理输出磁力云图,如图4所示。通过电磁仿真分析结合实时采集的线圈中铁芯运动的时间和线圈电流,来模拟制动线圈内部的运动状态。

图4 电磁仿真云图
在电磁仿真的基础上,构建电梯制动器的数字孪生虚拟实体,包括反映实际电梯制动器外观形状、尺寸大小、装配关系等几何信息的几何模型,反映实际制动器的制动特性、电磁特性等物理性能的物理模型。在电梯制动器的几何模型和物理模型的基础上,建立ADAMS制动器的动力学行为模型,定义制动器的材质,设定其运动的边界条件、弹簧系数以及阻尼系数,并结合磁力云图,通过电磁力的变化对制动器的制动力矩进行仿真分析,通过后处理输出动力学特性图,如图5所示,从而分析制动器在不同工况下,电磁力和制动弹簧力矩的性能变化。
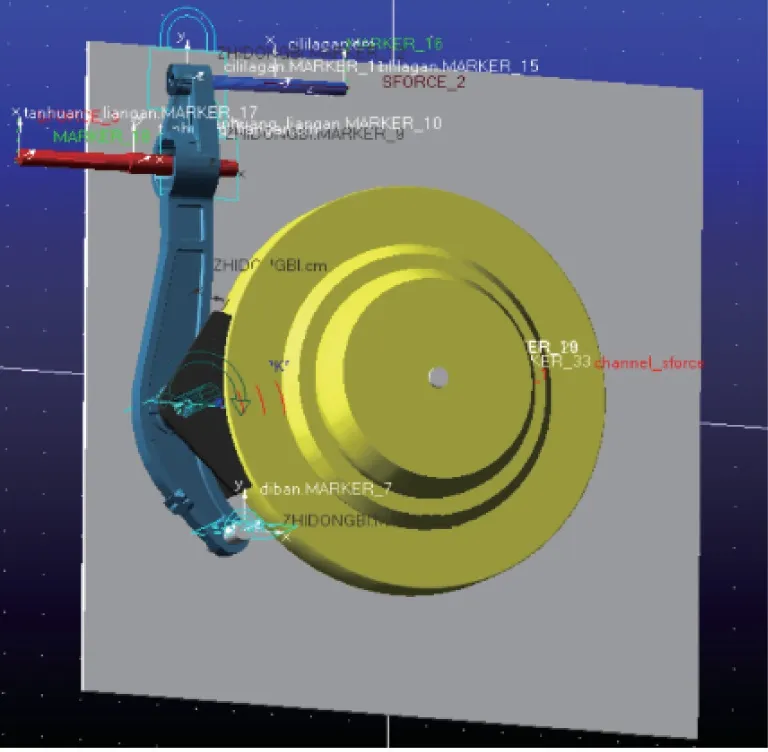
图5 动力学仿真图
在上述分析的基础上,平台层对传输层传输的数据进行数据分析,并针对相关平台各种数据协议之间的不同接口,通过开放数据库互连(ODBC)、Java数据库互连(JDBC)等驱动接口进行数据共享,并将高保真模型的分析结果反馈至电梯制动器实体,来更新数字孪生虚拟实体,使虚拟模型不断迭代与演化;基于数据关系、历史经验、大数据、数据挖掘等形成的评价体系,针对电梯制动性能,建立状态监测和健康状态诊断的规则模型,实现处理、存储、融合、分析感知层传递的实际电梯系统的数据、外部系统共享的数据以及虚拟实体孪生结果数据。
3 数字孪生的电梯制动性能预测及评价的平台搭建
3.1 电梯制动性能预测模型的构建
数字孪生的电梯制动性能预测及评价的平台主要依据电梯的诊断知识库、运营维护数据库、连续的动态采集信息、制动线圈的电磁仿真和动力学仿真的后处理信息,建立电梯的故障预测因素的关联数据集,形成电梯制动性能状态监测预警模型,从而完善电梯数字孪生体的进化。
电梯制动性能预测与评价系统通过获取电梯的实时动态信息,在诊断知识库模块、电磁仿真模块和动力学仿真模块的基础上,建立深度多模态信息融合的电梯数字孪生算法,通过PCA对数据进行相关性分析,可以得到数据维度相关性不大的数据,可作为输入数据,并将上述样本信息通过随机森林拆分为训练集和测试集,并将原有的数据集分为前期数据信息、中期数据信息和后期数据信息,为此建立基于PCA-RFLSTM的数据回归电梯预测模型,如图6所示。其中前期数据源作为数据挖掘的训练数据,中期数据作为数据挖掘模型的修正数据,后期数据作为数据挖掘模型的验证数据。LSTM数据回归预测模型随着实时数据的变化依次更新,保持电梯数字孪生体的持续进化,并通过深度多模态信息融合的电梯数字孪生算法,从而达到对电梯性能的及时分析以及故障预测。
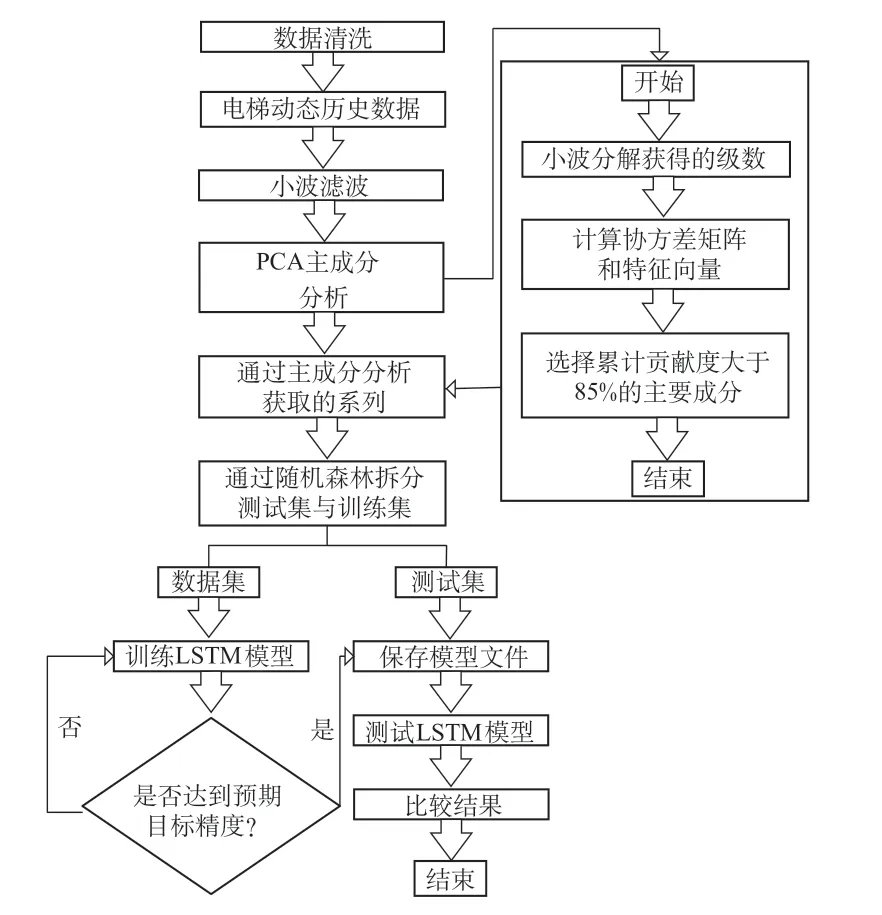
图6 基于PCA-RF-LSTM的数据回归电梯预测模型
3.2 电梯应用服务系统的构建
电梯应用服务系统是各类分析的决策系统,根据电梯物理实体和虚拟实体相关数据的融合分析及开发故障诊断、远程运维、事故追溯等分析技术,对电梯进行状态监测和安全评价。
基于电梯物理实体和虚拟实体,通过将多维数据信息融合以及算法分析决策的结果反馈至应用层,针对电梯数字孪生应用层的需求,通过平台层的数据分析结果并结合MR(混合现实技术)的人机交互来实现操作、检测、维修、更换等信息流闭环。
通过使用增强现实的MR人机交互工具来识别现场的设备环境,应用于Unity-3D(实时3D引擎)平台以增强现实的形式将制动器孪生体与物理实体相叠加,以MR的视角在现场呈现电梯信息数据曲线图和制动线圈的磁密云图,使维保人员迅速理解并判断当前制动器的结构和运行状态;与此同时维保人员可以通过远程指导的模块功能,通过系统内的远程专家来帮助查看制动器的制动电流和磁力云图的历史演化趋势,结合关联数据明晰电梯在过去、现在和未来的变化趋势,达到对设备进行问题预测与状态评价的目的。
3.3 电梯制动性能预测与评价的数字孪生体系的构建
电梯制动性能预测与评价的数字孪生体系的构建,主要基于电梯物理实体的动态感知与虚拟实体高保真模型的数据融合,并通过孪生数据电梯预测融合算法进行故障诊断、远程指导、事故重构,如图7所示。

图7 电梯制动性能预测与评价的数字孪生体系
4 电梯制动性能数字孪生系统的综合性能评价
针对电梯制动性能数字孪生系统的准确性、安全性、经济性、稳定性、可靠性等分别进行阐述如下:
4.1 系统的准确性
电梯制动性能数字孪生系统提出基于PCA-RFLSTM的数据回归电梯预测模型,通过实验平台模拟故障的场景,系统能够可靠地处理相关数据并给出实时预测诊断,该模型在保证预测精度的同时给出对应的置信区间,实现实时的预测效果。
将电梯制动性能数字孪生系统应用于实验平台进行测试,该实验平台以每组运转100次进行实验测试,共运行10组,并在每组内随机模拟各类制动性能故障事故共10次,经实验结果统计,在系统实时监测下,制动性能故障检测可以迅速准确地识别故障并进行提前预警,极大地避免了因制动性能不足,而对电梯运行带来的安全隐患。
4.2 系统的安全性和经济性
本系统基于深度学习和实时交互技术,并结合动力学和电磁学建立高保真模型,来实现基于数字孪生的实时预测制动性能的安全预警。
在电梯制动性能数字孪生系统中通过使用增强现实的MR人机交互工具识别现场的设备环境,在电梯遇到突发紧急事件,维保人员可以借助MR设备紧急联系远程维护专家,通过减少设备的抢修时间,来提高紧急救援成功的概率,从而避免不必要的设备破坏和人员伤亡,来提升整体的经济效益。
4.3 系统的稳定性和可靠性
本系统基于边缘计算的智能网关,将处理的结果数据以数据流的形式,每隔1 s发送1组数据至孪生系统,孪生系统每间隔1 s解析1组数据,将数据结合高保真模型进行动态仿真得到了预测数据,并将预测数据上传可视化的电梯曳引机数字孪生平台,电梯曳引机数字孪生平台如图8所示。该预测系统经过长期的可靠性测试,具有较好的稳定性。
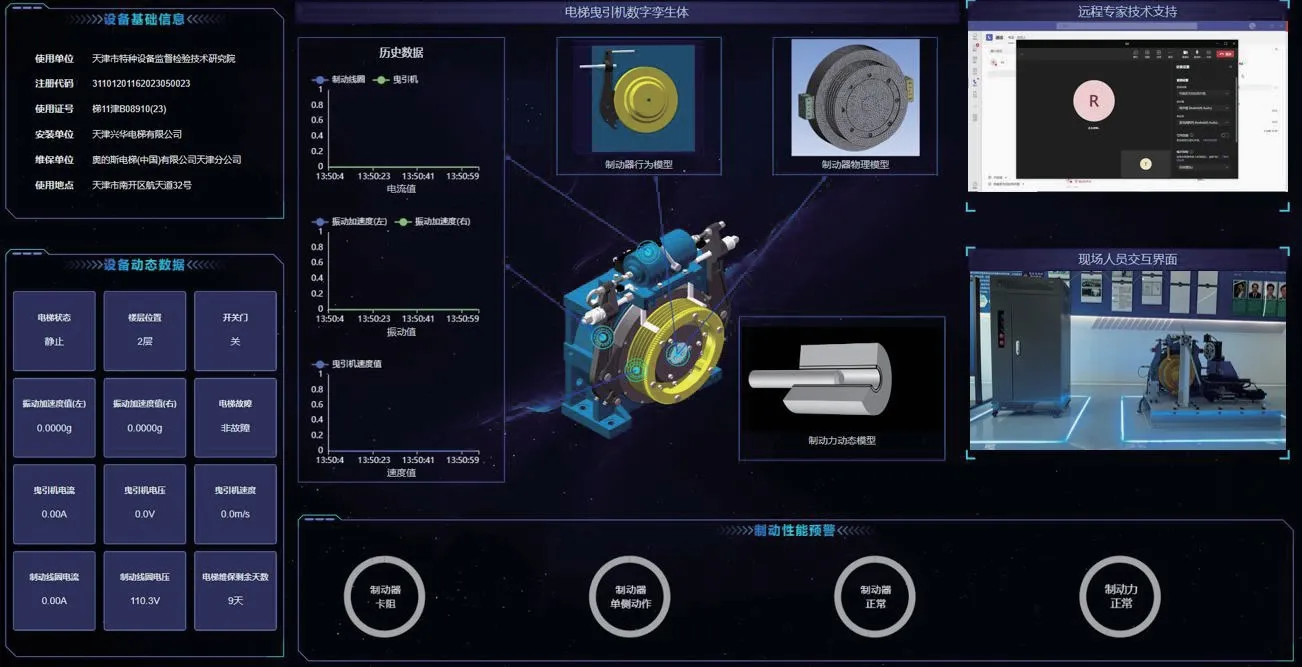
图8 电梯曳引机数字孪生平台展示图
5 系统前期使用情况
本文研制出的数字孪生电梯制动性能预测及评价系统,在数字孪生实验室对其功能测试成功后,在天津市范围内布置了300多台基于边缘采集的智能网关系统,已经连续1年对电梯的性能指标进行实时动态监测,并对电梯的安全性能进行评估分析和故障预测,后续将对应用服务平台和人工智能算法进行更新迭代,为电梯数字孪生领域的监测作出贡献。
6 结束语
本文针对传统电梯监测的局限性,自主设计并搭建电梯实验平台,基于实验平台极大地缩减了电梯制动性能的测试周期,并提出数字孪生电梯制动性能预测及评价系统。基于边缘计算的物联网网关对电梯进行实时动态采集,并搭建了电梯数字孪生体,建立COMSOL制动线圈的电磁力仿真模型以及ADAMS的动力学模型,进行电梯孪生体和物理实体之间的双向映射与动态交互;并构建了基于PCA-RF-LSTM的数据回归电梯预测模型,达到对电梯的性能进行及时分析以及故障预测的目的;并在电梯的应用服务中搭建决策系统,根据电梯物理实体和虚拟实体相关数据的融合分析及开发故障诊断、远程运维、事故追溯等分析技术,对电梯进行状态监测和安全评价。