地基深空探测雷达研究进展与展望
2024-02-24丁泽刚董泽华李凌豪
龙 腾 丁泽刚,3 曾 涛,3 董泽华*,3 李凌豪
(1.北京理工大学雷达技术研究院,北京 100081;2.卫星导航电子信息技术教育部重点实验室(北京理工大学),北京 100081;3.北京理工大学重庆创新中心,重庆 401135)
1 引言
地基深空探测雷达是观测小行星、月球、类地行星等深空目标的地基雷达系统,通过主动发射电磁波,并接收反射信号,实现对深空目标的精确测量,是开展深空探测的有效手段[1]。深空探测其他重要手段包括深空探测航天器、光学望远镜、射电望远镜等,但与地基深空探测雷达相比,深空探测航天器携带的载荷雷达只能进行有限目标的探测,且探测成本高、任务周期长,难以实现大量深空目标探测;地基光学望远镜不能测距,影响深空目标快速定轨精度,且分辨率低,难以获取深空目标精细形貌结构;大口径射电望远镜(如FAST)自身不发射电磁波,仅被动接收天体辐射信号,可以观测到遥远宇宙中的射电脉冲星,却难以看到地球周围那些“不发光”的小行星、行星等深空目标。
因此,地基深空探测雷达具备许多独特优势,主要体现在:1)全天时全天候观测,不受气象光照等因素的影响;2)高分辨率观测,成像分辨率最高可达米级至亚米级,与探测器分辨率相当[2];3)可精确测距,能够大幅提升小天体快速定轨精度[3];4)具有一定的经济性,相对于发射探测器来说成本低,且一旦建成后可重复利用。
基于上述优势,美国《2023-2032 行星科学与天体生物学十年规划》白皮书指出:“雷达是测量近地天体物理和动力学特性最强大的遥感手段”[4]。过去数十年间,地基深空探测雷达已经被广泛应用于月球探测、小行星探测以及火星、金星、水星等类地行星探测中,在近地小行星防御、行星科学研究等方面发挥了不可替代的重要作用。
长期以来,先进的地基深空探测雷达始终是美国太空优势的重要战略组成。美国于1963 年就建成阿雷西博雷达,数十年来不断升级,保持世界之最,但其于2020 年12 月因辅助电缆与主电缆断裂,遭遇严重损毁,退出了历史舞台;1958 年建成的金石雷达也进行了多次升级改造,是近年来最活跃的深空雷达,也是当前看得最远的地基雷达。
本文梳理了目前国际上主要的地基深空探测雷达系统,回顾了地基深空探测雷达历史上取得的重要研究成果。在此基础上,介绍了分布孔径深空探测雷达的创新机理与最新研究进展,最后对地基深空探测雷达的未来发展趋势进行了展望。
2 国内外发展现状
2.1 国外发展现状
目前,世界上著名的地基深空探测雷达系统有阿雷西博雷达(Arecibo)、金石雷达(Goldstone Solar System Radar)、南半球雷达(Southern Hemisphere Planetary Radar System)、叶耶夫帕托利亚行星雷达(Evpatoria Planetary Radar)、干草堆雷达(Haystack Radar)和绿岸雷达(Greenbank)等。其中阿雷西博雷达和金石雷达承担了世界上绝大部分的太阳系天体的雷达探测工作,成为了国际行星科学研究中占据主导地位的地基雷达测量设施,并对月球、小行星以及火星、金星、水星等类地行星开展了大量观测实验,取得了重要的历史贡献。本章从地基深空探测雷达系统和地基深空探测雷达历史贡献两方面介绍地基深空探测雷达研究的发展现状。
2.1.1 地基深空探测雷达系统
1963 年,美国国家科学基金会在波多黎各建成了世界最大孔径的地基雷达——305 m 孔径的阿雷西博雷达(Arecibo)[5],如图1(a)所示,而后又于1974 年为其加装了波长12.6 cm 的发射机和双偏振接收机。阿雷西博雷达天线孔径305 m,具有UHF 和S 两个频段。UHF 频段发射机工作频率为430 MHz,工作波长为70 cm,S 频段工作频率为2380 MHz,工作波长为12.6 cm,射频输出功率为460 kW。在NASA 和美国国家科学基金会(National Science Foundation)联合资助下,1997 年阿雷西博雷达S频段雷达发射机功率增加至1 MW。

图1 美国阿雷西博雷达实物图Fig.1 Arecibo radar system
数十年来,阿雷西博雷达一直是地球上观测能力最强的地基雷达系统,空间分辨率最高可达7.5 m。然而波多黎各频繁的地震飓风等自然灾害对阿雷西博雷达的工作造成了一定影响。2020 年,阿雷西博雷达辅助电缆与主电缆相继断裂,随后发生坍塌,如图1(b)所示,被迫退役。
1958 年,美国喷气推进实验室(Jet Propulsion Laboratory,JPL)建立了金石太阳系雷达(Goldstone Solar System Radar,GSSR)[6],如图2 所示,位于加利福尼亚州南部的莫哈韦沙漠。金石雷达是美国深空探测网(deep space network,DSN)的重要组成部分。金石雷达与深空探测网深空通信综合设施(Goldstone deep space communications complex)DSS-14 共用天线,天线孔径70 m,X 频段工作波长为3.5 cm,发射功率500 kW,具有全方位指向能力。金石雷达系统是近年来最活跃的地基深空探测雷达,也是目前世界上唯一具备近地小行星业务化观测能力的地基深空探测雷达。
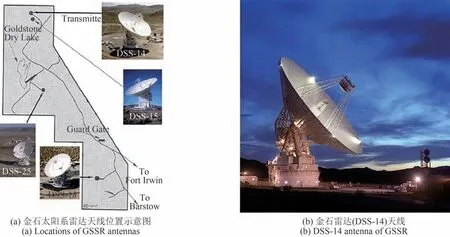
图2 金石雷达系统Fig.2 Goldstone Solar System Radar(GSSR)
南半球雷达(Southern Hemisphere Planetary Radar System)位于澳大利亚,使用深空站DSS-43的发射机和南半球最大的全可动天线——堪培拉深空通信中心(Canberra Deep Space Communications Complex)70 m 天线作为发射,使用帕克斯射电望远镜(Parkes Radio Telescope)和澳大利亚望远镜紧凑阵列(Australia Telescope Compact Array,ATCA)作为接收,如图3 所示。DSS-43 发射机工作在S 波段,工作频率为2110~2118 MHz,理论上最大发射功率为400 kW,产生的天线增益为63 dBi。但实际工作中由于大于100 kW 的发射功率将需要额外的飞机安全谈判,因此发射功率采用约75 kW[7]。
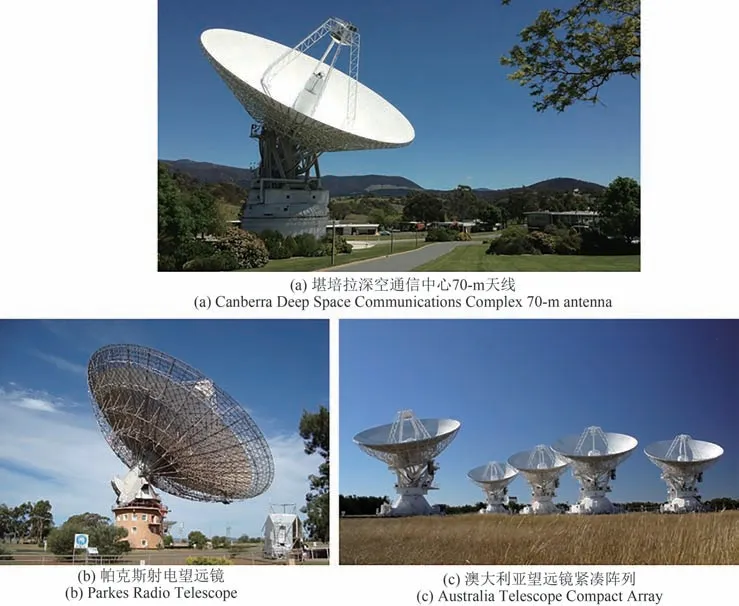
图3 澳大利亚南半球雷达Fig.3 Southern Hemisphere Planetary Radar System
2015 年南半球行星雷达系统首次开展了近地小行星观测,观测目标为近地小行星(43577)2005 UL5 和(33342)1998 WT24。两颗近地小行星均为潜在威胁小行星,直径分别约为300 m 和415 m,观测时最近距离分别为2.5×106km 和4.2×106km。其中,1998 WT24 小行星从南方接近地球,证明了南半球行星雷达可以更早地探测到来自南方的近地小行星[7]。
叶耶夫帕托利亚RT-70 行星雷达(Evpatoria Planetary Radar)位于克里米亚叶耶夫帕托利亚,如图4 所示,位置约为北纬45°11′,东经33°11′,雷达天线口径70 m,工作波长约6 cm,发射功率100~200 kW,波束宽度约3.5′,指向精度约10″,接收机噪温约40 K,1978年以来长期用于苏联的多项深空探测任务。2001 年,叶耶夫帕托利亚RT-70 行星雷达在系统升级和大功率发射机维修之后,进行了一系列初步的空间碎片雷达探测实验[8]。2012 年,叶耶夫帕托利亚RT-70行星雷达基于升级后的系统开展了对金星与火星的探测实验[9]。

图4 叶耶夫帕托利亚RT-70行星雷达Fig.4 Evpatoria RT-70 planetary radar system
20世纪60年代,美国麻省理工学院林肯实验室建成了干草堆雷达(Haystack Radar)[10],如图5(a)所示。干草堆雷达工作在X 波段(7.84 GHz),天线口径为36 m。自1974 年以来,随着阿雷西博雷达和GSSR 的使用,干草堆雷达逐渐转向卫星和弹道导弹等空间目标的探测和成像应用,于1979年成为美国太空监视网络的传感器。
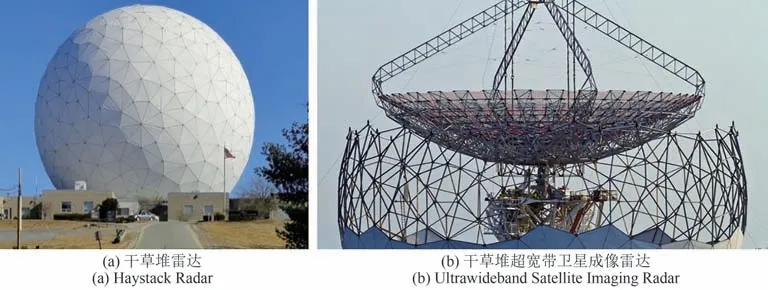
图5 美国干草堆雷达Fig.5 Haystack Radar system
随后,干草堆雷达从2002 年到2014 年间不断升级,林肯实验室团队为干草堆雷达的X 波段传感器增加了毫米波W 波段雷达功能,使这种新的双波段系统干草堆超宽带卫星成像雷达(Ultrawideband Satellite Imaging Radar)成为了世界上最高分辨率的远程传感器,如图5(b)所示。干草堆雷达是目前世界上最先进的空间态势感知雷达。
美国绿岸天文台(Green Bank Observatory)100 m口径绿岸望远镜(Green Bank Telescope)是目前世界上最大的全可动射电望远镜。2021 年以来,美国国家射电天文台、绿岸天文台和雷神公司(Raytheon Intelligence &Space)正在为绿岸射电望远镜设计下一代行星雷达系统[11],如图6(a)所示。绿岸雷达天线口径为100 m,目前已经加装了Ku 波段(13.9 GHz)发射机,具备了发射能力,原型机发射功率目前仅有700 W。绿岸雷达采用双基地成像模式,绿岸雷达天线发射,美国国家射电天文台的10个25 m VLBA 天线接收。未来,将为绿岸射电望远镜配备500 kW 的Ka 频段(35 GHz)雷达,然后使用VLBA和未来的下一代甚大阵列(ngVLA)作为接收器[12]。

图6 绿岸雷达系统Fig.6 Green Bank Observatory
2022 年,绿岸雷达发布了新的高分辨率月球图像,这是有史以来使用绿岸雷达技术制作的最大合成孔径雷达图像。绿岸雷达拍摄的第谷陨石坑区域图像包含约200 亿像素,覆盖了175 km×86 km 的区域,分辨率接近1 m×4 m,如图6(b)所示。
当前,国外地基雷达的发展趋势在向分布式、新体制研究转变,美国提出了构建深空先进雷达能力(Deep Space Advanced Radar Capability,DARC),正在积极开展分布孔径雷达新体制研究,如图7 所示。该系统可以合成更大的功率孔径,计划在世界各地的中纬度地区部署三个地面天线站点,以提升对地球同步轨道目标的探测、跟踪、识别和表征能力[13]。

图7 深空先进雷达系统Fig.7 Deep Space Advanced Radar Capability
2.1.2 地基深空探测雷达历史贡献
国外自20 世纪六七十年代起就开展了地基深空探测雷达的相关研究,实现了对月球、近地小行星以及类地行星等天体的二维高分辨成像,获取了大量天体地形地貌及运动特性等重要信息,并在此基础上取得了一系列瞩目的科学成果,还为历次深空探测任务提供了有效支撑。
(1)月球探测
月球是地基雷达探测应用最早也是最多的天体。70 年代诞生了第一张月球近地端全球地图[14-15],80年代后期通过对延迟-多普勒技术的深入了解,地基雷达对月球雷达成像的分辨率达到了千米级,并消除了地图间的不连续性,首次得到了分辨率在3~5 km的连续月球全球地图,如图8所示[16]。

图8 分辨率3~5 km的连续月球全球地图Fig.8 Lunar global radar image with resolution of 3~5 km
第一次用12.6 cm 波长对月球进行双站观测是由Stacy 在1990 年和1992 年进行的,在阿雷西博雷达以北11 km使用了一个30.5 m的辅助天线[17]。真正意义上的双站观测于2003年开始实施,同样由阿雷西博雷达完成发射,位于西弗吉尼亚州国家射电天文台的绿岸射电望远镜负责接收月球雷达回波,最初采用70 cm 波长在17 分钟相干时间间隔下发射非编码脉冲的实验证明其分辨率可以达到400~600 m,通过该方法得到了月球近地侧的大部分地图[18]。随后,Campbell 等人通过阿雷西博雷达采用70 cm 波长、40 分钟相干间隔的观测方式对月球宁静海成像,绘制出分辨率达200 m的地图,如图9(a)所示[19]。而利用S波段对月球进行区域成像可以达到更高的分辨率,例如Campbell等人利用阿雷西博雷达12.6 cm 波长联合绿岸望远镜接收。得到了月球分辨率为80 m 的局部区域雷达成像结果如图9(b)所示[20]。这些对月球的高分辨率成像结果解决了许多重要的科学问题,包括大型撞击尺度上撞击熔融沉积物的划定,埋藏在盆地覆盖物下方古老玄武岩的绘制,月海底层结构与火山和地形演化历史,以及火山灰沉积、熔岩流等一些月表特征。

图9 月球表面高分辨率雷达成像结果Fig.9 High-resolution radar imaging results of lunar surface
地基深空探测雷达可用于绘制月球两极的高分辨率地形图,特别是月球南极地区[21],金石太阳系雷达分别于1997 年和2006 年对月球开展了干涉实验[22],实验中利用金石太阳系雷达的70 m孔径的DSS-14 天线作为发射天线,利用天线组阵技术(DSS-13/DSS-25)相干接收,得到了月球南极地区的表面高程,空间分辨率达到20 m,高程分辨率达到5 m[23],如图10 所示,该图像比Clementin 月球探测器获得的分辨率高50倍,它揭示了月球南极的地形比我们以前认知的更加高低不平。这些对月球的高分辨率成像结果解决了许多重要的科学问题,包括大型撞击尺度上撞击熔融沉积物的划定,月海底层结构与火山和地形演化历史,也为月球探测任务选取着陆点提供了非常有价值的参考信息。

图10 月球南极地区雷达干涉图像Fig.10 Interference radar image of lunar south-pole region
月球永久阴影区水冰探测是地基深空探测雷达对月球探测的另一主要研究内容,月球的自转轴与黄道面间的倾角非常小,因此月球两极地区附近的某些洼地可能永远处于太阳光照射的阴影中。地基雷达在过去的观测研究中揭示了在水星极地地区类似的永久阴影区具有高圆极化率(CPR)的散射特性,这与水冰的散射特性相吻合,并推测可能的水冰沉积是由彗星撞击产生的[24-25]。1997 年,Stacy 等人利用阿雷西博天文台S频段数据以125 m空间分辨率、双极化方式搜寻月球极地永久阴影区的水冰,探测中没有发现任何一块面积大于1 km2的区域存在高雷达后向散射截面和高圆极化率,即没有发现月球极地存在大面积分布的水冰[26];阿雷西博70 cm雷达系统的观测结果显示在更大的穿透深度下同样没有出现高后向散射特性以及其他的连续特征;阿雷西博雷达和绿岸望远镜12.6 cm波长对月球极地绘制的20 m分辨率图像表明圆极化率值变大的区域与永久阴影地形轮廓明显吻合[21],如图11所示,推测月球极地永久阴影区的特殊散射特性更可能来自于岩石碎片而不是板状冰结构[27]。因此,目前没有地基雷达证据明确表明月球极地陨石坑内存在大面积板状冰沉积。
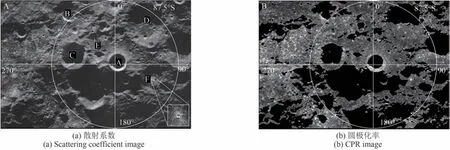
图11 月球南极圆极化率(CPR)图像Fig.11 Radar circular polarization ratio(CPR)image of lunar south-pole region
(2)小行星探测
小行星是围绕太阳运行的小型岩石天体,尺寸从几米至数百千米。美国利用阿雷西博雷达和金石太阳系雷达对小行星进行了大量观测研究,很早就实现了对近地小行星与主带小行星的雷达观测[28-30]。地基深空探测雷达通过时延-多普勒方法可以实现小行星表面高分辨率成像,还能够估计近地小行星的尺寸、形状、自转周期等物理性质[31]。例如,阿雷西博雷达对(1627)Ivar 小行星实现二维成像,首次获取了近地小行星的雷达图像,如图12(a)所示;金石雷达还首次绘制了极度延长型小行星1620 Geographos 的雷达图像[32],如图12(b)所示。

图12 小行星雷达成像结果Fig.12 Radar imaging results of asteroids
地基雷达还可以反演小行星的三维形状结构。20 世纪70 年代,Ostro 等人最早提出利用雷达数据反演小行星的形状,但由于模型过于简单只能得到小型的大概尺度[31],随后Hudson 通过实验室激光雷达修正了小行星形状反演模型的精度[33],而后,不断有研究者根据新观测到的小行星更正模型,以得到更准确地成像结果,同时估计小行星的相关物理特性。例如,Brozovic 等人用两种形状模型根据阿雷西博2380 MHz 和金石8560 MHz 雷达数据对4486 Mithra 小行星进行了成像并确定了其自转周期[34]。Nolan等人针对101955 Bennu小行星构建了一个三维模型,利用阿雷西博雷达和金石雷达数据对其形状进行了约束[35]。Crowell等人针对1929年发现的小行星(1627)Ivar 提出了改进的形状模型,比之前的模型具有更丰富的细节,根据该模型以及阿雷西博2380 MHz 雷达数据得到了该小行星的尺寸,自转周期,表层风化情况等详细特征[36]。
随着地基雷达成像技术的发展,基于地基雷达图像获取了许多小行星更精细的三维形状结构。例如,阿雷西博雷达绘制了4769 Castalia(1989 PB)小行星的双瓣形结构延迟-多普勒图像[37],随后根据雷达图像反演得到包含167个参数的该小行星三维形状结构[38]。金石太阳系雷达成功获取了4179 Toutatis小行星的高分辨率二维图像[39],随后在此基础上分析了其转动周期与转轴的空间指向,并获取了该小行星的三维结构模型[40],如图13(a)所示。此外,金石雷达利用3.5 cm波长数据并结合光学观测数据,获取了1998 KY26小行星的成像结果与三维形状反演结果[41],如图13(b)所示。阿雷西博雷达根据12.6 cm波长数据获取了216 Kleopatra小行星的雷达图像与三维形状[42],如图13(c)所示。2006 年,金石太阳系雷达还首次实现了对双小行星1999 KW4 的高分辨率成像并获取了其三维形状结构[43-44],如图13(d)所示,揭示了自转加速可能是双小行星的形成机制。

图13 小行星雷达三维形状反演结果Fig.13 Radar 3D shape inversion results of asteroids
近二十年来,地基深空探测雷达对小行星探测逐渐从成像发展为对小行星物理特性的测量与估计。例如,Naidu 等人在2000 ET7 小行星接近地球期间对其进行了雷达成像,分辨率达15 m,并估计了其自转周期与运动轨迹[45]。Lawrence 等人对2005 WC1小行星完成了分辨率达7.5 m的雷达成像,证实该小行星是第一颗具有极高圆偏振比,较低光学反射率与高雷达反射率的小行星[46]。Ipatov等人2015年7 月对有潜在危险的2011 UW158 小行星进行了近距离雷达观测,确定了小行星的大小和旋转周期与光学观测相一致,该小行星具有不均匀的表面和扁长的形状,并根据观测到的多普勒频移改进了该小行星的轨道参数[47]。Brozovic等人利用金石雷达数据对2007 PA8小行星进行了成像,距离分辨率达3.75 m,并估计了其形状与旋转状态[48]。
此外,地基雷达首次直接观测并验证了小行星的雅科夫斯基(Yarkovsky)效应与YORP效应,雅科夫斯基效应指当小行星吸收阳光和释放热量时对小行星产生的微小的推动力,YORP 效应是亚雅科夫斯基效应的二阶变化,能够改变天体的自转速率。Chesley 等人利用阿雷西博雷达和金石雷达对6489 Golevka 小行星十余年间的观测结果,首次直接观测到了小行星雅科夫斯基效应[49]。Taylor等人利用阿雷西博雷达与地基光学望远镜联合观测,分析了2000 PH5小行星的自转特性,首次验证了小行星YORP 效应[50],该小行星也因此得名54509 YORP小行星。
随着地基深空探测雷达重要性的日益凸显,2012 年起NASA 增加了对阿雷西博雷达和金石雷达的资金投入,地基深空探测雷达每年观测到的近地小行星(近日点距离小于1.3 AU 的小行星,简称NEA)数量增长了大约三倍,如图14 所示。截至2020 年,阿雷西博雷达和金石雷达共观测到近地小行星967颗,其中可能对地球存在威胁的小行星(近地点距离小于0.05 AU 的近地小行星,简称PHA)405颗,双小行星与三合星59颗。
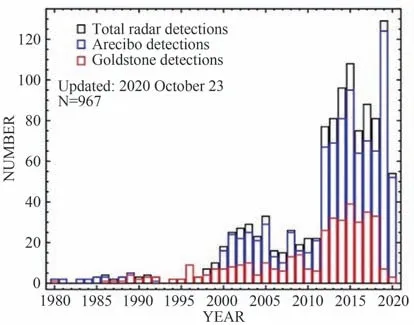
图14 地基雷达每年探测近地小行星数量Fig.14 quantity of detected asteroids by Earth-based radar each year
此外,地基深空探测雷达还在近地小行星防御任务中发挥了不可替代的重要作用。美国于全球率先开展近地小行星撞击防御任务——双小行星重定向任务(Double Asteroid Redirection Test,DART)[51],于2021 年11 月发射航天器,2022 年9 月主动撞击近地双小行星,以改变其从星轨道[52],入选《Science》2022年世界十大科学突破。
DART 任务撞击前,地基深空探测雷达图像证实Didymos 为双小行星,如图15(a)所示,支撑NASA 确定其为DART 任务目标小行星,并获取了Didymos 小行星大小、形状、自转等物理特性[53-54],如图15(b)所示,为任务撞击方案设计提供了关键约束。任务撞击后,2022 年10 月金石雷达联合绿岸射电望远镜,在撞击后数天内即测量得到从星轨道周期缩短了约33分钟,快速评估了任务的撞击处置效果[55],如图15(c)所示。
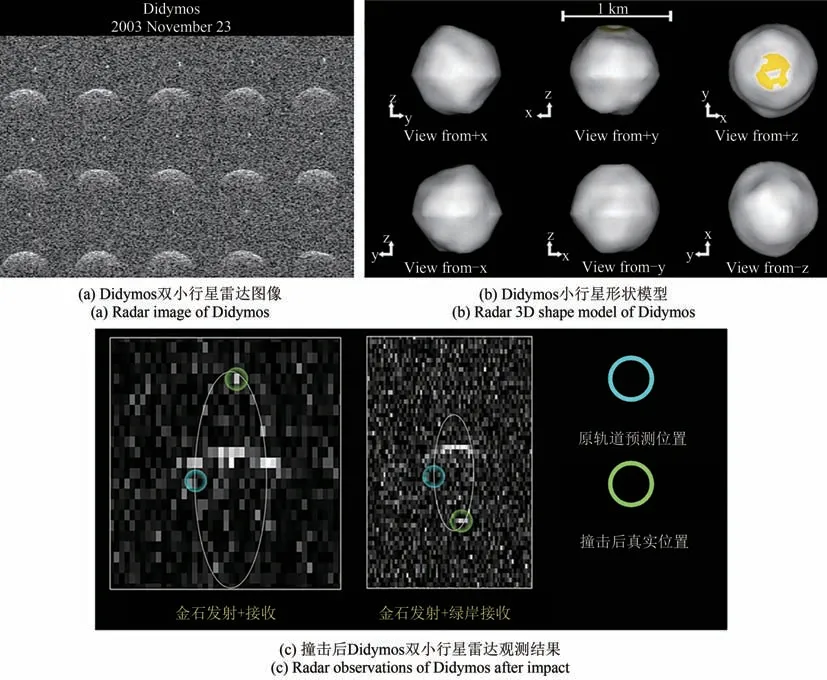
图15 DART任务雷达观测结果Fig.15 Radar observations of DART mission
(3)类地行星探测
除月球和小行星外,地基深空探测雷达对类地行星也开展了大量的观测。类地行星指以硅酸盐岩石为主要成分的行星,包括水星、金星、地球和火星。阿雷西博雷达与金石雷达对火星的观测数据中可以提取火星表面高程、反射率、粗糙度等信息,其经度方向的空间分辨率达20 km,纬度方向分辨率达150 km。2005~2012 年间,阿雷西博雷达对火星实现了空间分辨率达3 km的表面成像[56],这些观测数据提供了火星地形和地质物理等有关的直接信息,还成功应用于Viking、Pathfinder、2003 Mars Exploration Rovers 等深空探测任务,辅助航天器完成了运行轨道确定、导航定位、着陆点筛选等工作[57],根据阿雷西博雷达观测Viking 1 航天器在火星着陆点Chryse 平原周围的地表粗糙度结果,如图16 所示,Viking 1 最终确定在Chryse 平原的中部偏西相对平坦的区域着陆。

图16 Viking 1着陆点Chryse平原地表粗糙度雷达观测结果Fig.16 Radar image of Viking 1 landing site on Martian Chryse Planitia
由于金星表面被浓密的大气层遮蔽,光学观测对其无能为力,20 世纪60 年代,地基深空探测雷达开展了对金星的观测,并揭示了金星的自转周期为243 天[58],金星的准确半径为6050 km[59];1970 年,利用阿雷西博雷达70 cm 波长数据首次采用地基雷达干涉方法对金星进行了观测;1988 年,阿雷西博雷达12.6 cm 波长数据被用于对金星表面7%的区域进行成像,分辨率达到1.5~2 km,成像结果证明金星Beta 与Eisila 区域山脉和Guinevere 平原是由火山形成的[60]。2012年,当金星接近地球在内合的位置时,阿雷西博雷达获取了金星多视叠加后的雷达图像[61],如图17所示。

图17 金星雷达图像Fig.17 Radar image of Venus
1965 年4 月,阿雷西博雷达观测结果揭示了水星的自转周期是59天[62],使得人类对于水星的自转运动有了全新的认识。阿雷西博雷达数据还为水星极地地区水冰贮藏提供了直接证据[24],利用阿雷西博雷达S波段探测获得了水星北极地区的雷达图像[63],如图18所示,空间分辨率达1.5 km,图中明亮区域被认为是永久阴影区的水冰沉积。近年来,新提出的雷达散斑位移干涉测量技术在水星探测中得到了首次成功应用,通过地基雷达干涉测量方法观测得到水星自转轴倾斜度为2.11±0.1弧分[64]。

图18 水星北极地区地基雷达成像结果Fig.18 Radar imaging result of north-pole region of Mercury
2.2 国内发展现状
目前我国地基深空探测仍然以光学望远镜和射电望远镜作为主要手段,在雷达方面发展较为缓慢,我国雷达深空探测主要集中在空间目标探测上,尚未有面向小行星、类地行星等深空目标业务化观测的地基深空探测雷达。
近年来,我国在射电望远镜方面取得了重要进展。我国作为10 个主要成员国之一参与了平方千米阵列射电望远镜SKA(Square Kilometer Array)的建设工作。同时,我国逐渐发展出多个全球领先的射电天文先导项目,“十三五”期间,我国建成了多部大孔径射电望远镜,包括世界最大孔径的500 m口径射电望远镜“FAST”,70 m 口径的上海天马全可动射电望远镜等,如图19所示。但这些射电望远镜都不具备主动发射能力,只能采取被动接收模式获取天体表面信息,难以对小行星、类地行星等“不发光”的天体进行精细探测与成像,无法直接获取天体地形地貌等特征信息,一定程度上限制了我国行星科学与深空探测的发展。
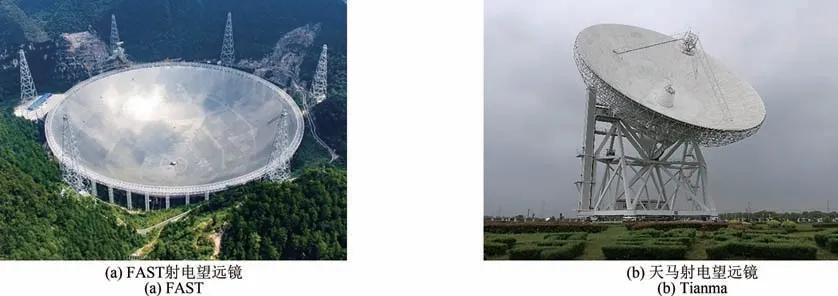
图19 我国大口径射电望远镜Fig.19 Chinese large-aperture radio telescopes
当前,国内一些单位逐步开展了地基雷达深空探测的相关研究,中国科学院地质与地球物理研究所基于三亚非相干散射雷达获得了月球正面南北半球拼接成像结果[65],成像分辨率为千米级,但该雷达的设计目标是地球电离层探测。北京理工大学也开展了地基雷达相关技术的研究[66-67],提出分布孔径深空探测雷达概念,也称“中国复眼”,同时率先开展了地基深空探测雷达系统论证与建设工作,以验证分布孔径深空探测雷达新体制。
综上所述,相比于国外,我国地基深空探测雷达相关研究尚处于起步阶段,尚未拥有对小行星等深空目标具备业务化观测能力的地基深空探测雷达系统。纵观国内深空探测与行星科学的发展趋势,当前正是开展地基深空探测雷达研究的良好契机。地基深空探测雷达可以与其他深空观测手段优势互补,灵活、高效的开展深空目标观测,为近地小行星防御与行星科学前沿研究提供重要支撑。
3 分布孔径深空探测雷达创新机理
目前世界上主要的地基雷达大多采用集中雷达式体制,即利用单一大孔径天线,结合单一大功率发射机,实现远距离探测。但雷达的天线孔径与发射功率均存在物理极限,导致集中式深空探测雷达观测距离受限,且不能扩展,难以满足对小行星、类地行星等深空目标日益增长的观测需求。此外,大孔径天线与大功率发射机容易损坏且难以维修,2019年金石雷达发射机故障,长达20个月无法执行小行星观测任务;2020 年阿雷西博雷达天线结构断裂,彻底损毁退役。因此,需要突破当前地基深空探测雷达体制的制约,发展地基深空探测雷达新体制。
分布孔径深空探测雷达是由多个雷达协同观测的深空探测装置,其核心机理为分布孔径雷达相参处理技术,原理如图20所示。分布孔径深空探测雷达通过控制多部雷达协同工作,使电磁波实现极远距离处的精确聚焦,完成同相叠加,并控制多部雷达协同接收,实现回波信号信噪比的大幅提升,从而突破传统集中式体制雷达的物理极限,因其形似昆虫复眼,故形象称之为“中国复眼”。

图20 分布孔径相参雷达新体制示意图Fig.20 Distributed aperture deep-space radar system
“中国复眼”缩比验证系统由4 部16 m 孔径雷达组成,如图21所示,位于重庆市两江新区明月山,主要用于月球观测,已于2022 年12 月成功开机运行,验证了分布孔径深空探测雷达体制的可行性,并拍摄了我国首幅地基雷达月球三维图像,受到国内外广泛关注。

图21 “中国复眼”缩比验证系统Fig.21 Scaled-down system of “China Compound Eye”
“中国复眼”目前正在建设由25 部30 m 孔径雷达组成的地基深空探测雷达系统,预计于2026年建设完成,建设地点位于重庆市云阳县龙角镇中洲岛,建设效果如图22所示。其关键技术包括分布孔径雷达全相参技术、分布孔径雷达深空目标高分辨成像技术等,建成后预计可实现对上千万千米外近地小行星探测能力。

图22 “中国复眼”预期建设效果图Fig.22 Rendering of “China Compound Eye”
4 分布孔径深空探测雷达研究进展
基于“中国复眼”缩比验证系统,目前已开展了关键技术研究及试验验证,包括分布孔径雷达相参技术、天体目标高分辨二维成像技术、天体目标高分辨三维成像技术等。
分布孔径雷达相参技术方面,采用基于外标校源的分布孔径雷达相参标校技术,以精确校准雷达单元间发射链路和接收链路的相对相位。理论上,当相对相位精确补偿后,目标的图像信噪比最大,因此可调整雷达单元之间的相对相位并测量目标的图像信噪比,图像信噪比最大时对应的相位即为相对相位的估计值。基于此原理,分别开展了基于月球的发射相参标校试验和基于射电源的接收相参标校试验,然后以月球第谷陨石坑区域作为目标区域,开展了分布孔径雷达的全相参性能试验验证。为了验证发射相参性能,分别进行了“四发一收”模式和“一发一收”模式的对月成像试验;为了验证接收相参性能,分别进行了“四发四收”模式和“四发一收”模式的对月成像试验。
理论上,与“一发一收”模式相比,“四发四收”模式对应的全相参后的信噪比增益为18 dB。“一发一收”模式、“四发四收”模式下的延迟多普勒成像结果如图23(a)和(c)所示,其中红框区域对应第谷陨石坑区域,放大结果如图23(b)和(d)所示。经过评估,全相参的信噪比增益最高可达17.8 dB,接近理论增益。实际上,月球表面目标的信噪比评估结果存在一定误差,但足以验证分布孔径雷达的全相参性能。
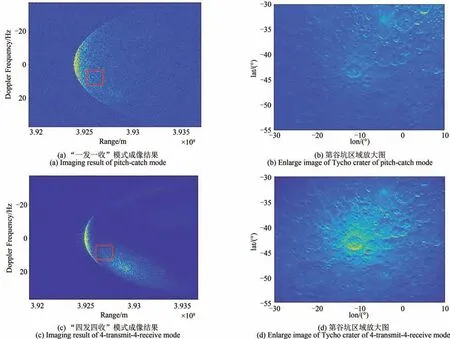
图23 分布孔径相参验证结果Fig.23 Results of distributed aperture deep-space radar coherence
天体目标高分辨二维成像方面,采用基于延迟-多普勒算法的地基雷达二维成像技术,并开展了地基雷达对月二维成像试验,获得了月球第谷陨石坑(Tycho crater)区域的地基雷达高分辨二维图像。二维成像结果如图24 所示,图像分辨率约为50 m×100 m,揭示了该区域大量月表地形纹理信息。

图24 月球高分辨二维成像结果Fig.24 High-resolution imaging result of the Moon
天体目标高分辨率三维成像方面,采用基于后向投影算法的地基雷达三维成像技术,并开展了地基雷达对月三维成像试验,获得了月球第谷陨石坑周边区域的地基雷达高分辨率三维图像,幅宽约为150 km,分辨率约为100 m。地理坐标系下的第谷陨石坑三维成像结果如图25 所示,可以看到第谷陨石坑的坑沿、坑壁、中央峰等地形特征清晰可见。

图25 第谷坑区域三维成像结果Fig.25 High-resolution imaging result of the lunar Tycho crater
5 展望
地基深空探测雷达在月球、近地小行星、类地行星等深空目标探测方面具有独特优势,取得了一大批显著成果,在深空探测领域发挥着日益重要的作用。但现有地基深空探测雷达大多采用集中式体制,导致其观测距离受限,且易损坏、难维修,制约了地基深空探测雷达的发展。分布孔径深空探测雷达新体制的观测能力不受集中式结构限制,可通过增加雷达数量持续提升系统的探测距离。因此,分布孔径深空探测雷达突破了传统地基深空探测雷达的天线孔径和发射功率物理限制,为地基深空探测雷达的发展提供了可靠途径。
未来,分布孔径深空探测雷达将是地基深空探测雷达技术的重要发展方向,通过加快构建分布孔径深空探测雷达系统,可验证大规模分布孔径深空探测雷达组阵观测的可行性,推动地基深空探测雷达领域的快速发展。同时,发展地基深空探测雷达与国内已有大口径射电望远镜、未来新建接收站之间的联合组网能力,布局我国地基深空探测雷达复合观测网,未来可进一步提升我国地基深空探测雷达的观测能力。
分布孔径深空探测雷达的快速发展,将促成一系列重要原创性成果不断涌现,有力支撑近地小行星防御等国家重大需求,并推动我国行星科学研究的快速发展。同时,地基分布孔径雷达技术的率先突破,还将全面带动机载、弹载、星载分布孔径雷达的跨越式发展,促进雷达技术的快速发展与变革。