基于避障路径规划的无人直升机空地跟踪控制
2024-02-23杨静雯李涛杨欣冀明飞
杨静雯,李涛,杨欣,冀明飞
基于避障路径规划的无人直升机空地跟踪控制
杨静雯,李涛,杨欣,冀明飞
(南京航空航天大学 自动化学院,江苏 南京 211106)
针对无人直升机(Unmanned Aerial Helicopter,UAH)在空地协同跟踪过程中的避障和控制问题,提出了新型路径避障规划和跟踪控制设计方法。针对不确定性的线性UAH模型,通过对UAH警示范围内二维环境信息进行处理判断,借助摸墙算法(Wall⁃Following Algorithm) 提出合适的避障策略,计算避障路径的行进角度以及能够弥补绕行距离的跟踪速度;将所得避障方法拓展至三维环境中,根据水平和垂直方向上的障碍物信息确定UAH飞行角度,从而减小由避障环节所带来的绕行距离;在上述避障算法的基础上,引入人工神经网络(Approximate Nearest Neighbor,ANN)估计模型不确定项,进而结合前馈补偿与最优控制等技术建立了跟踪控制设计方案。仿真结果表明,所提避障策略和控制算法有效。
无人直升机; 空地跟踪; 避障路径规划; 人工神经网络
无人直升机(Unmanned Aerial Helicopter,UAH)是一种能够利用机载航空电子系统,通过无线电远距离遥控或无人干预下自主完成控制任务的飞行器。与载人飞机相比,UAH具有尺寸小、造价低、质量轻以及对周围环境要求低等特点,尤其在执行危险性任务、飞行区域面积过小等情况下具有突出优势,因而得到世界各国的普遍重视,并被广泛应用于民用和军事领域,例如高空巡检、灾害监测、精细化农业、情报收集、特种作战、缉毒反走私、训练靶机等。尤其近二十年,随着微处理芯片、传感器、全球定位、电子通信、自动控制等技术的飞速发展,UAH也得到了迅猛发展,其控制问题已成为工程界和学术界的研究热点。
虽然UAH应用广泛,但复杂的飞行环境和自身的欠驱动特性限制了UAH的飞行性能和应用范围,例如外部阵风干扰会对UAH安全造成严重威胁[1]。因此,对UAH飞控系统的设计提出了挑战。在诸多控制任务中,跟踪控制作为UAH的重要应用得到了广泛关注,此外还包括空地协同、安全着舰以及远程攻击等。目前,常用的UAH跟踪控制方法涉及到经典控制、现代控制以及智能控制等技术[2⁃4],然而现有算法多基于参考目标行进轨迹明确的情况。但是,在实际飞行中,UAH面临无法预知的环境因素与突发情况,因此需要考虑UAH避障与路径规划等问题。实时自主避障能力,是实现UAH高度自动化甚至智能化的关键。完善的自主避障飞控系统能够大幅减少因飞行失误等导致的飞机损坏以及伤及人身安全与建筑物等事故,有效提升UAH的飞行安全与控制性能。为了提高UAH执行跟踪任务时的避障能力,需要对UAH自身运行轨迹进行规划。UAH避障规划[5⁃6]是指在未知障碍物环境中,UAH能够对障碍物信息进行反馈和计算,并在某些约束条件下自主分析环境信息,并规划出到目标状态的无碰撞路径[7]。然而,在UAH现有研究中,避障技术多用于解决编队控制[8⁃9]中的防碰撞问题。
当前UAH自主避障方法很多[10],主要包括人工势场法[11⁃12]、矢量场矩形法[13]、模糊逻辑避障法[14⁃15]、蚁群算法[16]、人工神经网络法[17⁃18]、改进A*算法等[19]。上述算法在满足避障有效性的同时存在一定的局限性。例如,文献[19]采用的改进A*算法,改进后的响应曲线虽然在一定程度上提高了避障系统的精度,但环境信息计算量较大,且容易忽略最优路径;人工势场法虽然在动态避障、目标追踪方面被广泛应用,但其具有局部路径规划算法的特点,容易引起局部极小值问题[20]。因此,文献[21]在由引力、斥力及合力引出的极小值点附近添加虚拟障碍,使规划路径逃出局部极值的限制,但计算式中存在伪逆矩阵,导致其路径规划策略中产生难以解决的奇异值问题。文献[22]引入信息素调节系数,采用全新的信息素非均匀分配策略,提高了被控对象全局路径搜索能力,但该算法也存在计算量大且计算耗时长等问题。
根据现有研究和实际UAH跟踪避障情形,在跟踪过程中遇到的障碍物可分为静态障碍物和动态障碍物两种[23]。本文仅针对静态障碍物,以摸墙算法为基础,设计UAH的二维避障策略,通过其特性有效解决常用避障策略中存在的局部最优问题。将UAH跟踪路径分为无障碍跟踪和有障碍避障两部分[24],将感知距离作为划分标准,降低避障所需的环境信息处理量,减轻UAH系统的计算负担。为了更契合实际情况,对所设计的二维避障策略进行拓展,得到三维情形下的避障策略[25⁃26]。相较于二维避障只能水平避障的缺点,三维策略能通过对障碍物信息进行对比,选取更合适的避障方向,规避UAH为避障而导致大范围绕行的问题,进一步提高UAH的避障灵活性。
1 UAH系统模型
由于实际UAH系统模型具有高度非线性特点[29],为了方便叙述控制设计方案,本文基于非线性模型简化方法[30],获得如下具有模型不确定的线性UAH系统:
其中:

2 跟踪路径规划
当UAH进行空地协同跟踪时,常常遇到地形复杂的区域,相较于对地面目标的跟踪任务,更应该注重UAH飞行中的安全性能,此时路径避障策略设计就显得尤为重要。本文参考摸墙算法中处理极小值陷阱的方法,提出了新型避障策略的设计方案,重点考虑如山体以及高楼等静态障碍的避障措施。在存在静态障碍物的情况下,UAH在实际飞行中不会存在跳变量,因此可将二维避障算法设计加以改进,并拓展至三维空间中,使避障策略更具有实际应用价值。
2.1 二维避障算法设计
图1为二维避障示意图。
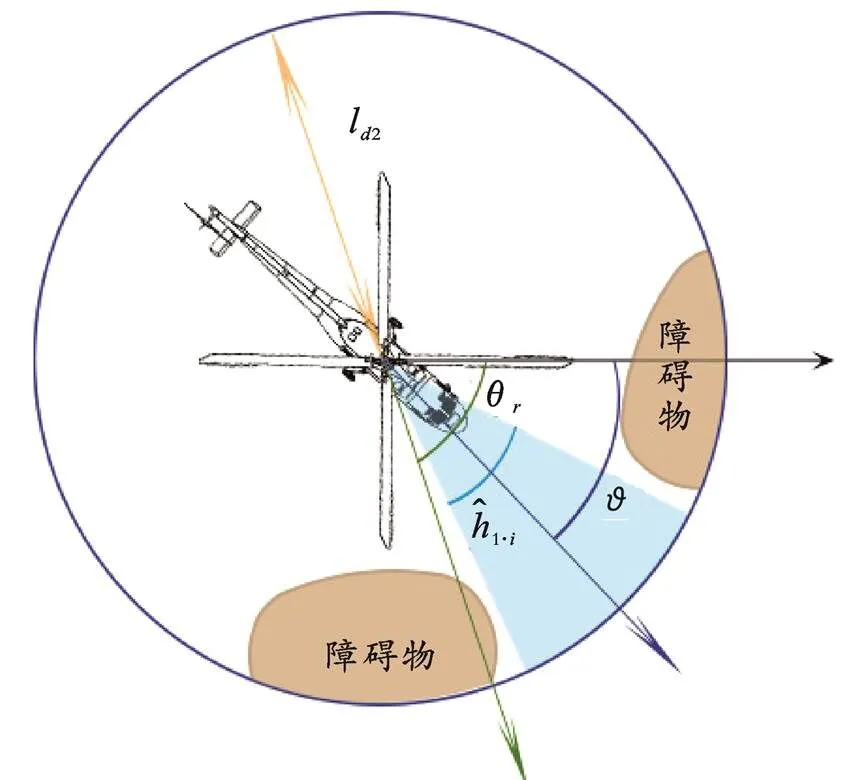
图1 二维避障示意图



由上述讨论可知,相较于人工势场法,避障策略逐步判断的方法能有效应对极小值陷阱等情况。特别是,相较于栅格避障方法,选择性信息处理可降低算法的计算量,改进栅格化地图中冗余数据过多导致储存量过大的问题。
2.2 三维避障算法设计
二维避障仅考虑UAH飞行高度不变时水平避障的情况。但是,在实际飞行中UAH会遇到水平范围较大而垂直高度较低的障碍物环境,此时仅采用二维避障策略导致能耗加剧。为了解决上述问题,本文基于二维避障设计融入垂直方向上的避障选择路径,设计并构建三维避障策略。此时,UAH可以同时在不同方向进行比较,并选择绕行最短的飞行路径,避免遇到大范围障碍物时绕行距离过远且能耗过大的问题。

2.3 跟踪路径设计


3 控制律设计
3.1 线性模型控制器
为了方便控制器设计,给出引理1。
引理1[31]考虑如下线性系统:





基于引理1,针对系统(1)引入以下记号:
在不考虑模型不确定的情况下,可以得到水平子系统状态方程:


式(13)中的系统参数分别为:


由此可见,UAH水平子系统与水平⁃垂直子系统均可以转化为线性系统(8)的形式,因而可以借助考虑避障情况下的参考跟踪路径,基于引理1分别建立二维和三维的跟踪控制器设计方案。
3.1.1 二维避障控制器
由二级避障设计可知,虚拟参考路径对应目标点水平速度为:





3.1.2 三维避障控制器





由此可知,UAH系统能在满足给定最优性能指标的前提下实现对参考运行轨迹的跟踪控制。
3.2 模型不确定性补偿
UAH精确模型在实际中很难获取,因此在系统建模中考虑不确定项更符合实际情况。对式(16)和式(21)控制器进行改进,即在控制器设计中利用估计量对不确定量进行补偿,以消除其对控制性能的不利影响。为了有效估计模型的不确定性,引入BP神经网络对误差进行在线训练,并通过前馈控制器进行补偿,其中BP神经网络通常由输入层、隐含层及输出层组成。

为了获得更好的逼近效果,可取神经网络激活函数为双曲正切函数。
第三步:根据前馈量后补偿,得到二维(见式(25))、三维(见式(26))改进后的控制器:

由于在线训练人工神经网络存在训练时间较长、难以实际应用的问题,选择优先对式(1)中UAH模型进行离线计算,随后将离线训练所得结果作为人工神经网络在线模拟的初始值进行优化。这一步骤的加入能够大幅度降低神经网络对UAH模型不确定量的在线模拟时间,使其能够更好地应用于实际情况中。
4 仿真验证

二维避障及三维避障的跟踪目标轨迹分别为:
三维仿真地形图数据为:

为较好地体现所设计解决局部最优问题的优点,拟定二维情况下的地形图并对其进行仿真实验,结果如图2所示。由图2可以看出,避障规划路径可以较好地处理局部最优问题,同时能够尽可能减少绕行距离,优化避障性能;设计的UAH避障路径虽然能够逃离局部最优情况,但不能完全避免规划路径进入地形凹陷处的问题。对此,需要对UAH避障警示圆半径进行选择。当警示圆半径较大时,UAH可能进入凹陷处,从而增加UAH逃离距离;当警示圆半径较小,且UAH检测到障碍物时,可能出现UAH与障碍物距离过近,导致UAH实际避障难度增加。在实际应用中,需要对UAH行进距离与避障安全性进行优先度选择。
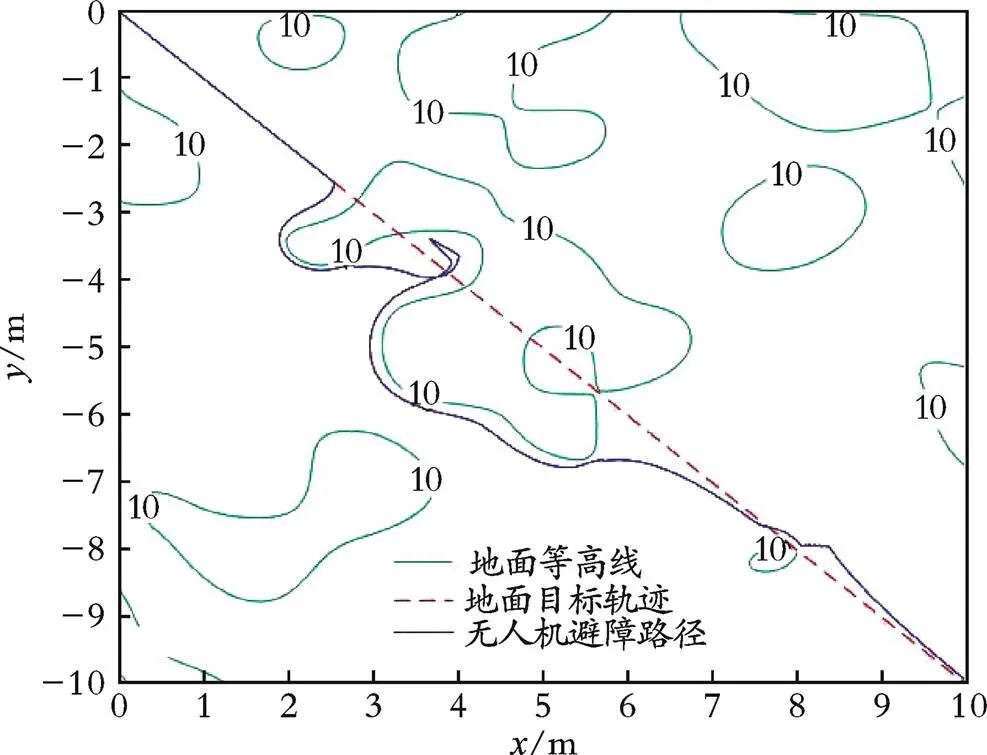
图2 二维避障规划路径
为了更好地展现三维避障策略能够对水平避障与垂直避障进行选择的优势,重新设计三维避障规划路径并对拓展至三维中的避障策略进行仿真,结果如图3所示。由图3可以看出,避障策略对水平范围广而高度较低、水平范围小而高度偏高的两种情况分别采用从顶部绕过与从侧面绕过的不同避障方式,由此可以验证三维避障策略具有能够进行避障选择并进行避障的优点,拓展后的避障策略能有效提升UAH的避障跟踪效率。
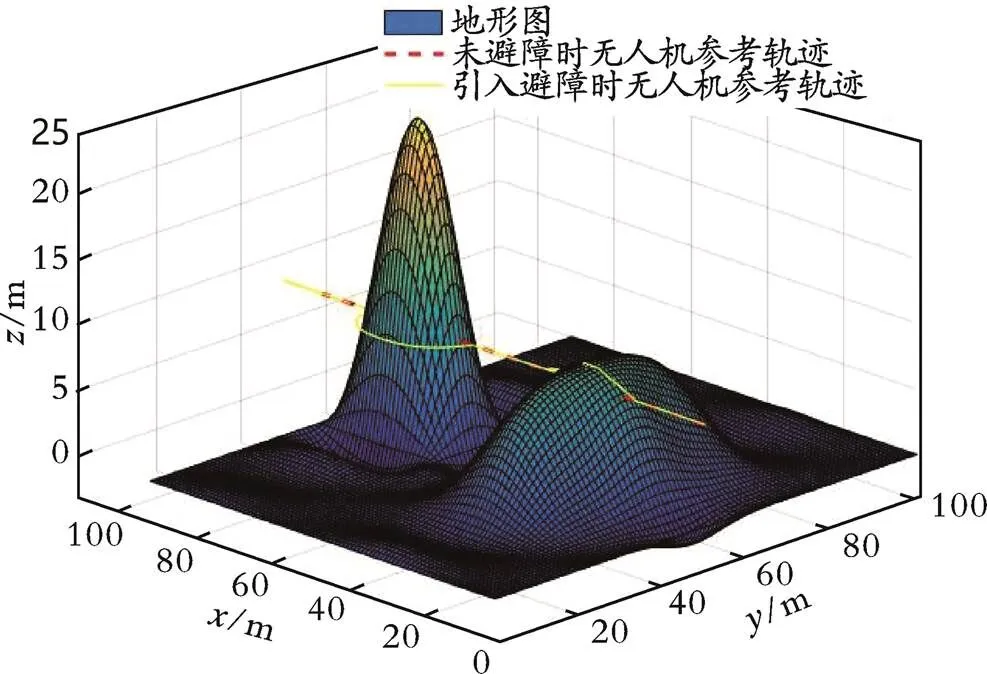
图3 三维避障规划路径
图4为三维避障跟踪情况。由图4可以看出,三维避障跟踪策略在遇到较大水平避障和较大垂直避障范围时,可以对避障方式进行比较,从而选择不同的避障方向,进一步提高实际飞行中UAH避障的灵活性。

图4 三维避障跟踪情况
以二维避障情况为例说明补偿模型不确定量的必要性,并对UAH飞行轨迹进行仿真,结果如图5所示。
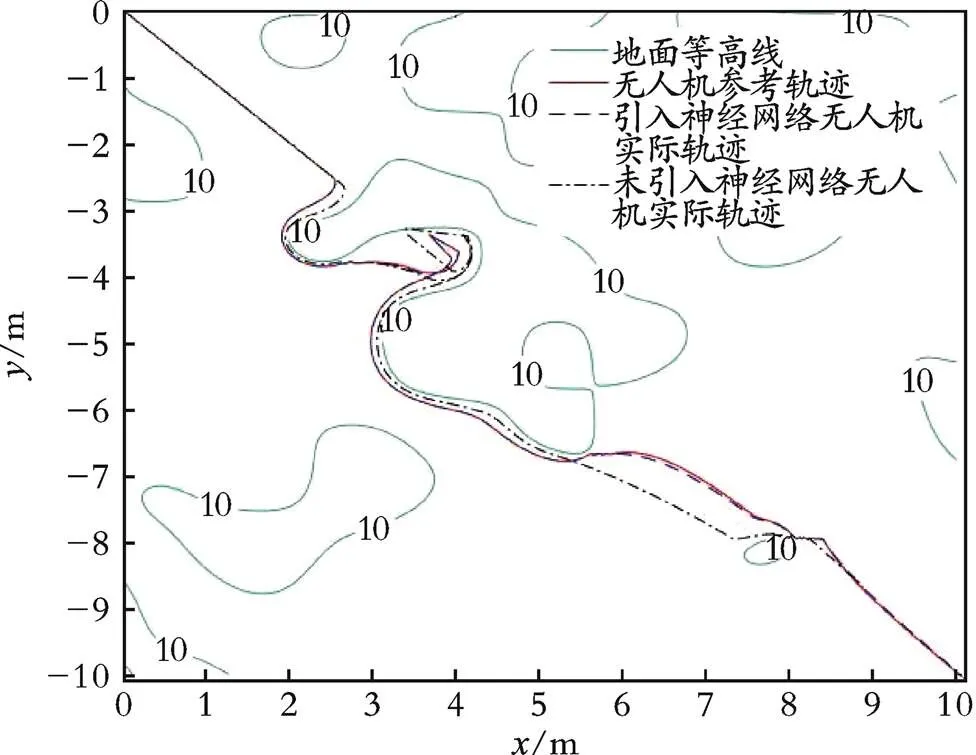
图5 人工神经网络补偿对比
由图5可见,如果对模型不确定性不进行补偿,UAH飞行轨迹会在部分区域碰撞,而引入人工神经网络对UAH模型不确定性进行估计并补偿后,不仅避免了碰撞,而且跟踪性也得到了较大的提升。
5 结 论
针对UAH跟踪过程中遇到的障碍物情况进行了静态避障设计,提出了二维避障策略并对其进行改进拓展至三维避障策略,有效地解决了局部最小值陷阱、存储数据量大等常见避障问题,提高了不同障碍物下UAH的避障灵活性。在规划路径的基础的上采用最优控制,在保证避障有效性的同时,完成跟踪控制任务并实现性能指标最优,提升了UAH跟踪性能。此外,采用人工神经网络对模型不确定量进行估计并补偿,仿真结果说明本文所提避障策略和控制算法有效。未来将对动态障碍物的避障策略进行探讨,同时对人工神经网络逼近过程进行优化,以拓宽避障策略与控制器的适用性。
[1] ZHAO W L,MENG Z J,WANG K P,et al.Backstepping control of an unmanned helicopter subjected to external disturbance and model uncertainty[J].Applied Sciences,2021,11(12):5331.
[2] MA H X,CHEN M,YANG H,et al.Switched safe tracking control design for unmanned autonomous helicopter with disturbances[J].Nonlinear Analysis:Hybrid Systems,2021,39:100979.
[3] ULLAH I, PEI H L. Sliding mode tracking control for unmanned helicopter using extended disturbance observer[J].Archives of Control Sciences,2019,29(1):169⁃199.
[4] 王琼,刘美万,任伟建,等.无人机航迹规划常用算法综述[J].吉林大学学报(信息科学版),2019,37(1):58⁃67.
WANG Q, LIU M W, REN W J,et al.Overview of common algorithms for UAV path planning[J].Journal of Jilin University (Information Science Edition),2019,37(1):58⁃67.
[5] 李安醍,武丁杰,李诚龙.低空无人机自主避障算法综述[J].电光与控制,2021,28(8):59⁃64.
LI A T,WU D J,LI C L.A survey on autonomous collision avoidance algorithms for UAVs at low altitude[J].Electronics Optics & Control,2021,28(8):59⁃64.
[6] 陈亚青,张智豪,李哲.无人机避障方法研究进展[J].自动化技术与应用,2020,39(12):1⁃6.
CHEN Y Q,ZHANG Z H,LI Z.Research progress on obstacle avoidance methods of UAV[J].Techniques of Automation and Applications,2020,39(12):1⁃6.
[7] 方健飞,张威,葛琳琳.基于避障切换控制的移动机器人路径规划[J].辽宁石油化工大学学报,2017,37(4):65⁃69.
FANG J F,ZHANG W,GE L L.Path planning of mobile robot based on obstacle avoidance switching control[J].Journal of Liaoning Shihua University,2017,37(4):65⁃69.
[8] 常路,单梁,戴跃伟,等.未知环境下基于改进DWA的多机器人编队控制[J].控制与决策,2022,37(10):2524⁃2534.
CHANG L,SHAN L,DAI Y W,et al.Multi⁃robot formation control in unknown environment based on improved DWA[J].Control and Decision,2022,37(10):2524⁃2534.
[9] VINOKURSKY D L,MEZENTSEVA O S,SAMOYLOV P V,et al.Model predictive control for path planning of UAV group[C]//Ⅲ International Scientific Conference:Modernization,Innovations,Progress:Advanced Technologies in Material Science,Mechanical and Automation Engineering(MIP⁃Ⅲ2021).Krasnoyarsk:IOP Publishing Ltd,2021:012092.
[10] TANG Z Z,MA H Z.An overview of path planning algorithms[J].IOP Conference Series:Earth and Environmental Science,2021,804(2):022024.
[11] 李二超,王玉华.改进人工势场法的移动机器人避障轨迹研究[J].计算机工程与应用,2022,58(6):296⁃304.
LI E C,WANG Y H.Research on obstacle avoidance trajectory of mobile robot based on improved artificial potential field[J].Computer Engineering and Applications,2022,58(6):296⁃304.
[12] 郝林佳,叶灿,都书鲜,等.改进人工势场的手术机器人位姿规划[J].控制理论与应用,2022,39(6):1121⁃1129.
HAO L J,YE C,DU S X,et al.Pose planning for surgical robot with improved artificial potential field method[J].Control Theory & Applications,2022,39(6):1121⁃1129.
[13] 吕佳,邱建岗.智能汽车避障路径规划与跟踪控制研究[J].机械设计与制造,2021(11):166⁃171.
[14] 刘冠邦,成海东.基于模糊决策的无人直升机智能实时避障研究[J].信息化研究,2018,44(2):19⁃23.
LIU G B,CHENG H D.Intelligent real⁃time obstacle avoidance for unmanned helicopter based on fuzzy decision making[J].Informatization Research,2018,44(2):19⁃23.
[15] 张思远.智能汽车路径规划与跟踪控制仿真研究[D].长春:吉林大学,2018.
[16] 韩攀,陈谋,陈哨东,等.基于改进蚁群算法的无人机航迹规划[J].吉林大学学报(信息科学版),2013,31(1):66⁃72.
HAN P,CHEN M,CHEN S D,et al.Path planning for UAVs based on improved ant colony algorithm[J].Journal of Jilin University(Information Science Edition),2013,31(1):66⁃72.
[17] 罗鹰,冒兴蜂.智能汽车换道避障路径规划与跟踪控制研究[J].机械设计与制造,2019(7):139⁃143.
LUO Y,MAO X F.Study on path planning and tracking control of intelligent vehicle obstacle avoidance by changing lanes[J].Machinery Design & Manufacture,2019(7):139⁃143.
[18] AMBEWADKAR G N,GAJRE S.Probe path planning for flatness measurement on coordinate measuring machine using ant colony optimization[J].Advanced Engineering Forum,2021,41:85⁃91.
[19] 陈继清,谭成志,莫荣现,等.基于人工势场的A*算法的移动机器人路径规划[J].计算机科学,2021,48(11):327⁃333.
CHEN J Q,TAN C Z,MO R X,et al.Path planning of mobile robot with A* algorithm based on artificial potential field[J].Computer Science,2021,48(11):327⁃333.
[20] QI B K,LI M Q,YANG Y,et al.Research on UAV path planning obstacle avoidance algorithm based on improved artificial potential field method[C]//The 2021 2nd International Conference on Internet of Things,Artificial Intelligence and Mechanical Automation (IoTAIMA 2021).Hangzhou:IOP Publishing Ltd,2021:012060.
[21] 谢龙,刘山.基于改进势场法的机械臂动态避障规划[J].控制理论与应用,2018,35(9):1239⁃1249.
XIE L,LIU S.Dynamic obstacle⁃avoiding motion planning for manipulator based on improved artificial potential filed[J].Control Theory & Applications,2018,35(9):1239⁃1249.
[22] 李志锟,赵倩楠.融合人工势场蚁群算法的移动机器人路径规划[J].电光与控制,2022,29(11):118⁃124.
LI Z K,ZHAO Q N. Path planning of mobile robot based on artificial potential field and ant colony algorithm[J]. Electronics Optics & Control, 2022, 29(11): 118⁃124.
[23] 张郭,许艳英,张亮.基于动静态安全场的机器人避障路径控制仿真研究[J].中国工程机械学报,2021,19(3): 232⁃237.
ZHANG G, XU Y Y, ZHANG L. Simulation research on obstacle avoidance path control of robot based on dynamic and static safety field[J]. Chinese Journal of Construction Machinery, 2021,19(3): 232⁃237.
[24] 胡多修,董文瀚,解武杰.无人机自主引导跟踪与避障的近端策略优化[J].北京航空航天大学学报,2023,49(1):195⁃205.
HU D X, DONG W H, XIE W J. Proximal policy optimization for UAV autonomous guidance,tracking and obstacle avoidance[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(1): 195⁃205.
[25] 蒙志君,平学寿,陈旭智. 无人直升机三维避障方法及仿真[J].北京航空航天大学学报,2016,42(8):1619⁃1626.
MENG Z J, PING X S, CHEN X Z. 3D obstacle avoidance method and simulation for unmanned helicopter[J]. Journal of Beijing University of Aeronautics and Astronautics,2016, 42(8): 1619⁃1626.
[26] LÓPEZ B, MUÑOZ J, QUEVEDO F, et al. Path planning and collision risk management strategy for multi⁃UAV systems in 3D environments[J]. Sensors, 2021, 21(13): 4414.
[27] 欧阳银涛,孙彦玺,屈敬朝,等.基于BP神经网络的人体活动识别方法[J]. 物联网技术, 2021, 11(12): 40⁃42.
OUYANG Y T,SUN Y X, QU J C, et al. Human activity recognition method based on BP neural network[J]. Internet of Things Technologies,2021,11(12):40⁃42.
[28] 黄越洋,李平,刘宣宇. 基于BP神经网络的非线性预测控制[J]. 辽宁石油化工大学学报, 2008, 28(1): 59⁃61.
HUANG Y Y,LI P, LIU X Y. Nonlinear predictive control based on BP neural network[J].Journal of Liaoning University of Petroleum & Chemical Technology, 2008, 28(1): 59⁃61.
[29] 吴鹏飞,石章松,吴中红,等. 无人直升机自主着舰轨迹跟踪控制[J]. 系统工程与电子技术, 2019, 41(11): 2573⁃2580.
WU P F, SHI Z S, WU Z H, et al. Trajectory tracking and control for unmanned helicopter's autonomous landing on ship[J]. Systems Engineering and Electronics, 2019, 41(11): 2573⁃2580.
[30] XIAN B,GUO J C,ZHANG Y,et al. Sliding mode tracking control for miniature unmanned helicopters[J]. Chinese Journal of Aeronautics, 2015, 28(1): 277⁃284.
[31] 陈浩浩,樊渊. 基于动态事件触发机制的线性系统最优控制[J]. 控制工程, 2020, 27(10): 1820⁃1827.
CHEN H H,FAN Y.Optimal control for linear systems based on dynamic event⁃triggered mechanism[J].Control Engineering of China, 2020, 27(10): 1820⁃1827.
[32] 马海志.BP神经网络的改进研究及应用[D].哈尔滨:东北农业大学,2015.
Collaborative Air⁃Ground Tracking Control of Unmanned Helicopter Based on Obstacle Avoidance Path Planning
YANG Jingwen, LI Tao, YANG Xin, JI Mingfei
(College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing Jiangsu 211106,China)
The paper aims to study the problem of obstacle avoidance in air⁃ground cooperative tracking control for the unmanned aerial helicopter (UAH),in which a new approach of designing the path obstacle avoidance plan and controller design is proposed.Initially, as for the uncertain linear UAH,by processing and judging two⁃dimensional environmental information within the warning range for the UAH,an obstacle avoidance strategy is proposed with the help of wall⁃following algorithm,and the flight angle of obstacle avoidance path and the tracking speed that can make up for bypass distance are calculated.Secondly,the proposed obstacle avoidance method is extended to the three⁃dimensional case,and the flight angle of the UAH is determined based on the obstacle information in the horizontal and vertical directions,which can reduce the bypass distance caused by the obstacle avoidance link as possible.Thirdly,based on two derived obstacle avoidance algorithms above,the artificial neural network (ANN) is introduced to estimate model uncertainty,and then the tracking control design schemes are established by using feedforward compensation and optimal control technologies.some simulations demonstrate the effectiveness of the proposed obstacle avoidance strategy and control algorithm.
Unmanned aerial helicopter ; Clearing tracking; Obstacle avoidance path planning; Artificial neural networ
TP13
A
10.12422/j.issn.1672⁃6952.2024.01.011
2023⁃03⁃31
2023⁃10⁃25
国家自然科学基金资助项目(62073164,61873127,61922042);国防科技重点实验室基金项目(61422200306)。
杨静雯(1998⁃),女,硕士研究生,从事无人直升机跟踪控制方面的研究;E⁃mail:986594811@qq.com。
李涛(1979⁃),男,博士,副教授,从事网络控制和飞行控制等方面的研究;E⁃mail:autolitao@nuaa.edu.cn。
杨静雯,李涛,杨欣,等.基于避障路径规划的无人直升机空地跟踪控制[J].辽宁石油化工大学学报,2024,44(1):71-79.
YANG Jingwen,LI Tao,YANG Xin,et al.Collaborative Air⁃Ground Tracking Control of Unmanned Helicopter Based on Obstacle Avoidance Path Planning[J].Journal of Liaoning Petrochemical University,2024,44(1):71-79.
(编辑 王戬丽)