基于移动三维激光扫描技术的地铁隧道接触网导高检测新方法*
2024-02-23卢建军黄小斌郑佳佳
卢建军 黄小斌 吴 勇 郑佳佳 鲍 艳
(1.浙江华东测绘与工程安全技术有限公司, 310014, 杭州; 2.杭州杭港地铁有限公司, 310018, 杭州;3.北京工业大学城市与工程安全减灾教育部重点实验室, 100124, 北京)
接触网导高是保证列车正常受电的重要参数。若导高过高,则会使电弓离线产生电弧,进而烧损接触导线和受电弓; 若导高过低,则会危及人员和超限货物的安全。可见,当接触导线坡度变化过大时,易因导高过高而产生电弧,从而影响弓网受流质量,加大滑板的接触导线的磨损。因此,需要定期进行导高检测[1]。
导高检测分为接触式检测和非接触式检测两种。接触式检测的常用方式为吊杆式法及检测车法;非接触式检测的常用方式为光学法法超声波法、激光法和摄像法。接触式检测的检测工具须和输电高压线接触,在检测过程中存在安全隐患,且其过程繁琐、精度低。目前较先进的接触网导高检测多采用超声波法及激光法。其中超声波法检测受外界干扰影响大,误差大。三维激光扫描技术具有抗外界干扰强、检测精度高等优点,能实时自动监控,实现对接触网导高的动态测量[2]。对此,本文提出基于移动三维激光扫描技术的地铁隧道接触网导高检测新方法。
1 导高检测新方法
1.1 模型构建
扫描设备为Amberg GRP5000移动式三维激光扫描仪(以下简称“扫描仪”),其采用线扫描模式进行外业数据采集,扫描速度为100 r/s,移动速度为0.5 m/s。推动扫描仪沿隧道中线前行,即可得到整个隧道的三维点云模型。由线扫描模式进行数据采集,隧道结构及附属物同扫描系统的距离相对稳定,所以点云模型的点云密度相对均匀,从而保证了点云模型的整体精度。
地铁隧道中的接触网大部分属于刚性接触网,接触导线被汇流排牵引,整体结构比较明显。通过三维激光扫描获取隧道结构点云模型(见图1)的同时,也包含了接触网等附属结构的点云信息。接触网实景照片见图2。通过数据裁剪可得到接触网部分的点云模型(见图3),基于接触网点云模型可进行导高及拉出值的检测。
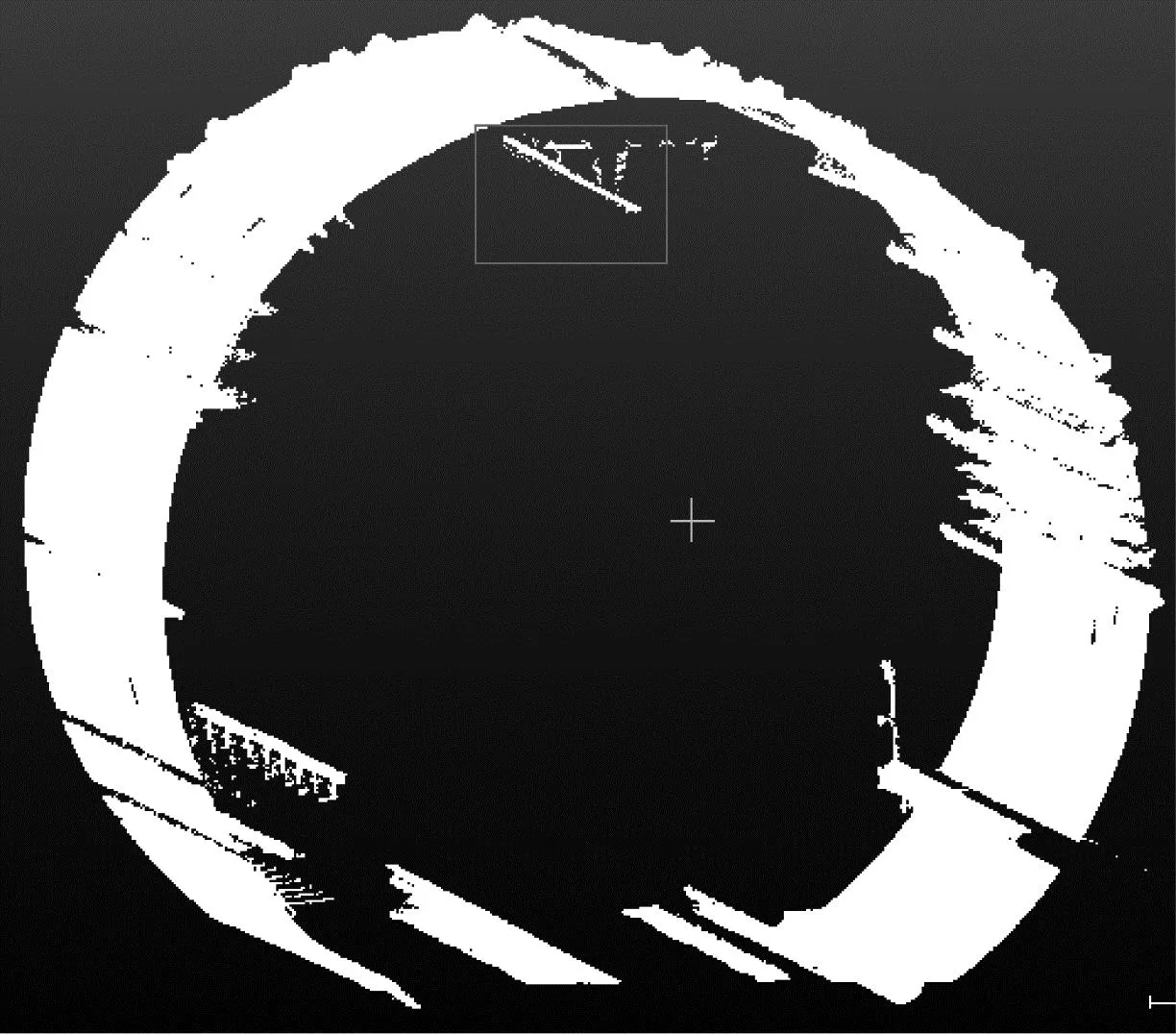
图1 隧道结构点云模型
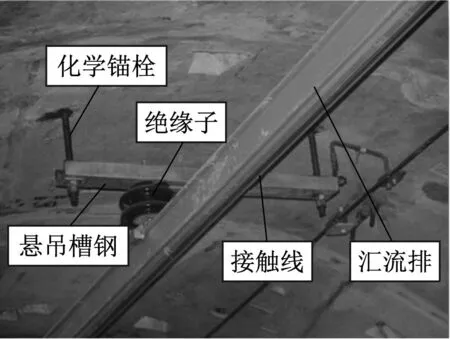
图2 接触网实景照片
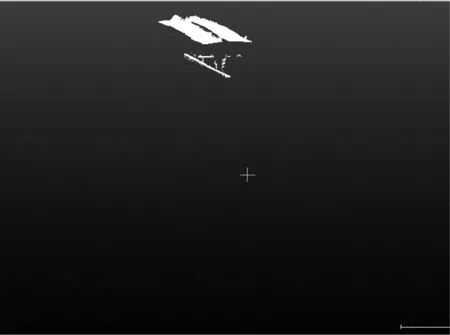
图3 接触网点云模型
1.2 相对坐标系统
在基于移动式三维激光扫描技术获取点云的原始数据中,有两套相对坐标系统——UTC(超高改正)坐标系统, CTC(无超高改正)坐标系统。如图4所示:UTC坐标系统的X、Y坐标轴分别为水平方向和竖直方向,坐标轴朝向不随扫描系统的倾斜角度变化而变化;CTC坐标系统的x轴平行于轨面朝向隧道壁,y轴垂直于轨面朝向隧道顶部。两套系统的坐标原点O都在轨面连线的中点。进行导高检测时采用CTC坐标系统,接触网点云模型中任意点i的纵坐标值yi即为接触网导高,横坐标值xi即为拉出值。
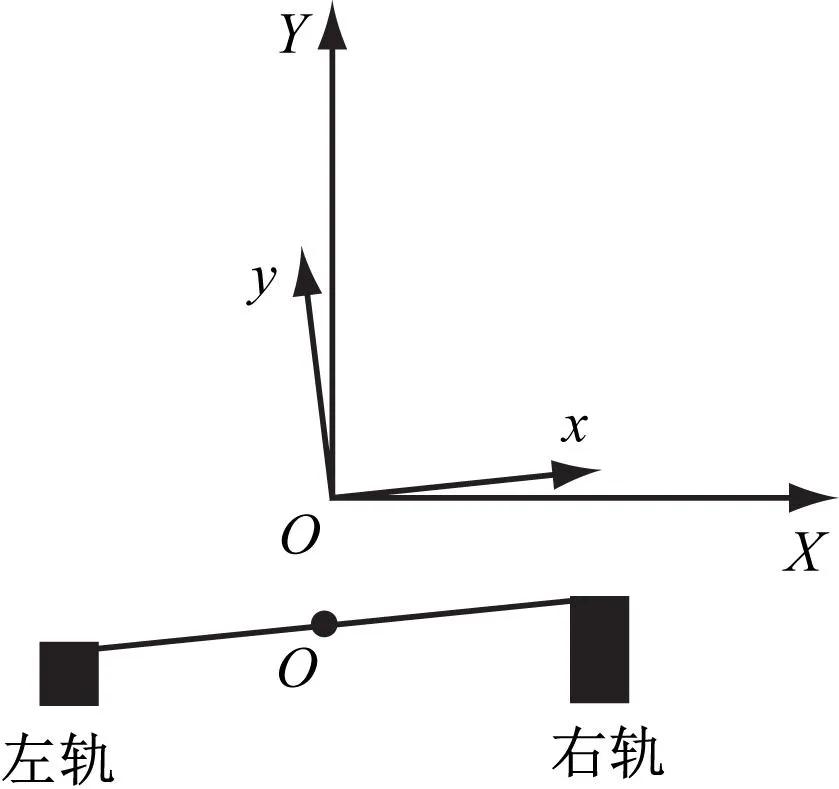
图4 坐标系统示意图
1.3 导高检测
三维激光扫描获取得到的隧道结构点云模型中包含接触网等设备设施信息。通过点云截取可单独提取出接触网点云模型。接触网点云模型中包含接触导线、汇流排、绝缘子、悬吊槽钢、化学锚栓等结构。其中有效信息是沿隧道延伸的接触网中接触导线最低点的高度及拉出值。由于CTC坐标系统中yi值即为导高,因此在点云模型中找到yi最小值,然后提取该位置里程即拉出值即可。
根据地铁隧道的环境特性(以一环一环管片拼装构成),因此为了数据的全面性及更好的定位,每一环管片生成找到yi值最小值,并提取出该位置的拉出值及里程信息,加上该位置环号信息。导高有设计的标准导高,一般为40~50 mm,可根据实测导高值与设计值对比得到导高差异量。整个隧道接触网系统是由一根根锚段组成,为了保证受电弓能从一根锚段顺利平滑过渡到另一根锚段,在两根锚段衔接部位有一定重叠,通常涉及四环管片,在导高测量时两根锚段的高度都需要测量,故导高成果表中应包含锚段关节的信息。杭州某地铁区间盾构隧道采用扫描仪得到的导高检测结果(部分)见表1。
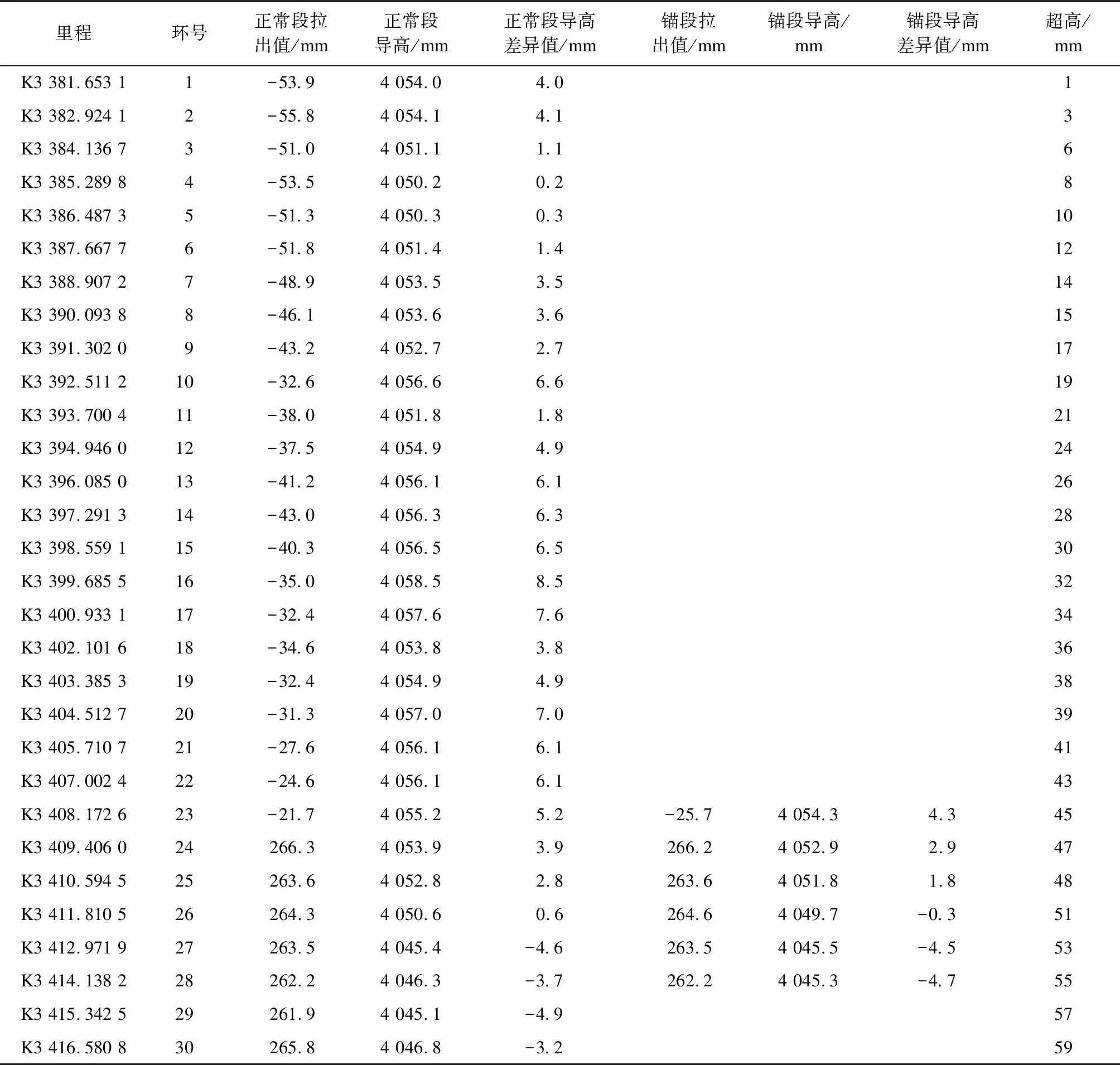
表1 杭州某地铁区间盾构隧道采用扫描仪得到的导高检测结果(部分)
1.4 误差来源分析
在进行处理导高检测结果时发现,隧道断面点云模型中存在毛刺,如图5所示。接触网点云模型中的毛刺会直接影响导高检测精度。
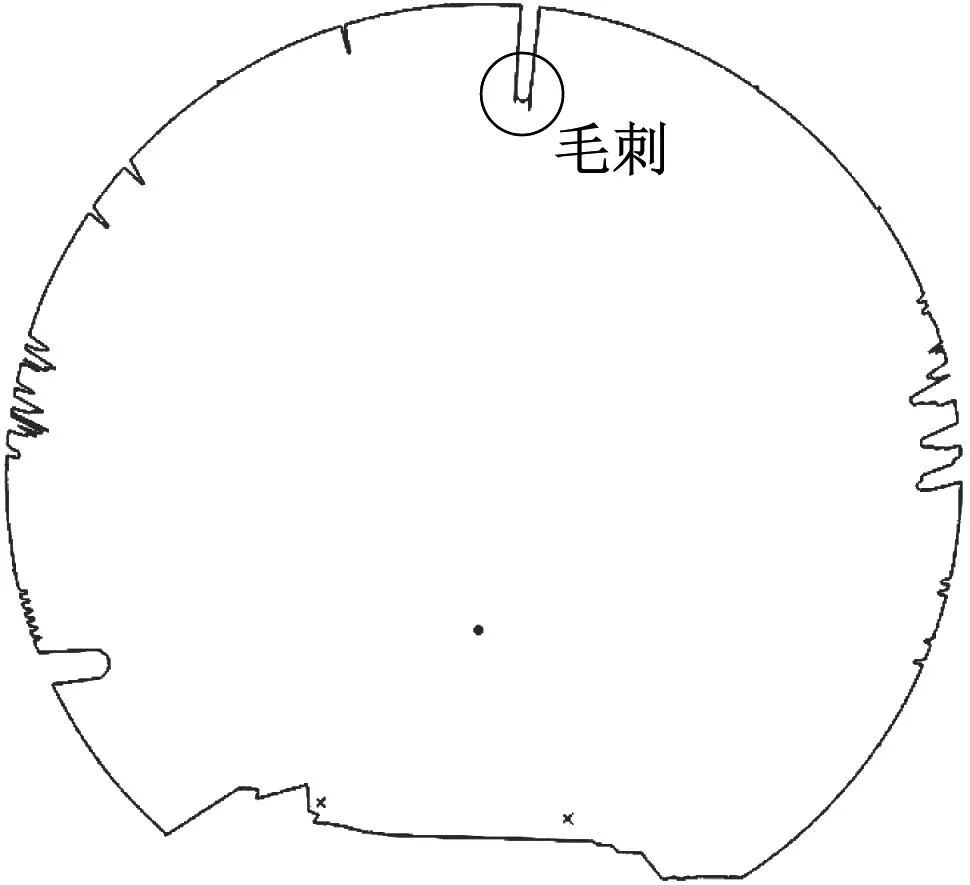
图5 隧道断面点云模型中的毛刺
经研究,接触导线及汇流排因同受电弓长期接触摩擦,其表面光滑且反射率较高,故而形成激光脚点(单个激光脉冲在物体表面的反射区域)。这些激光脚点在垂直入射接触网时会发生散射和漫反射,进而产生毛刺等噪点。为了减少激光的散射和漫反射,本文尝试采用改变激光入射角度来降噪。
2 降噪策略
2.1 改变扫描仪激光线入射角度
原扫描仪的激光扫描平面垂直于隧道中线,扫描激光线也垂直入射接触网。原扫描仪的扫描激光线入射示意图如图6所示。原扫描仪由多个传感器刚性连接,具有组装灵活且稳定的特点。基于此,为了降低激光脚点散射和漫反射,本研究采用预制固定倾斜角度的刚性倾斜组件来改变扫描仪的激光线入射角度,之后根据激光线入射角度对点云模型的坐标进行投影转换,即可得到真实的接触网点云模型。
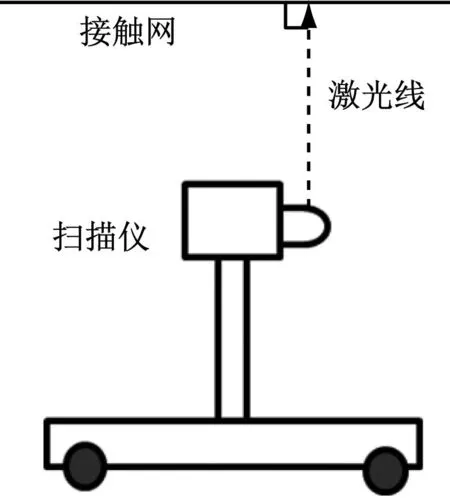
图6 原扫描仪的扫描激光线入射示意图
刚性倾斜组件样式如图7所示。刚性倾斜组件通过8个螺栓孔和中间卡槽,通过扫描仪的运载部件同扫描仪连接。刚性倾斜组件底面平整,表面倾斜。其倾斜的表面会使扫描仪产生倾角,进而改变扫描激光线的入射角度。
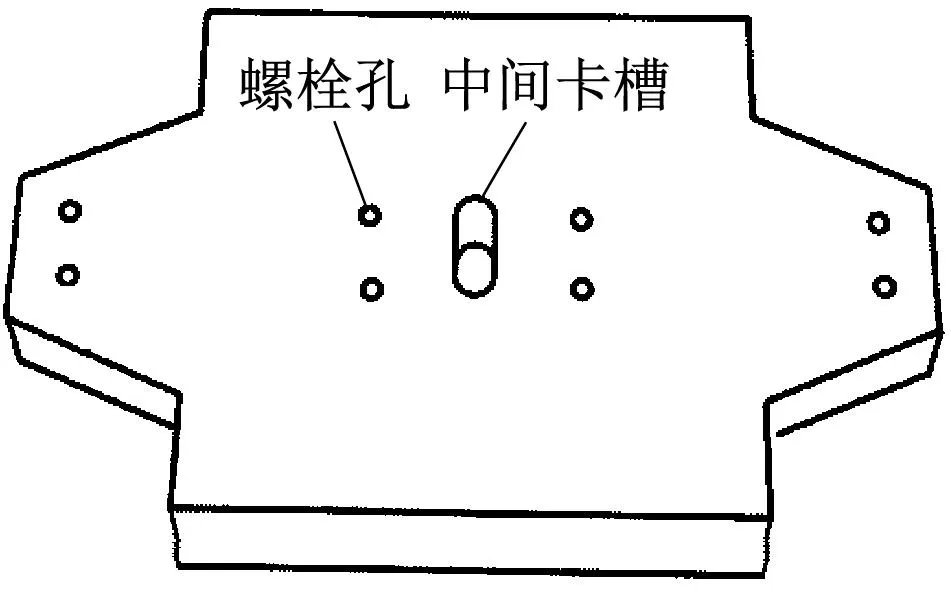
图7 刚性倾斜组件示意图
加装刚性倾斜组件后,改进的扫描仪扫描激光线入射示意图如图8所示。经试验验证,此项改进可减弱激光脚点散射和漫反射。
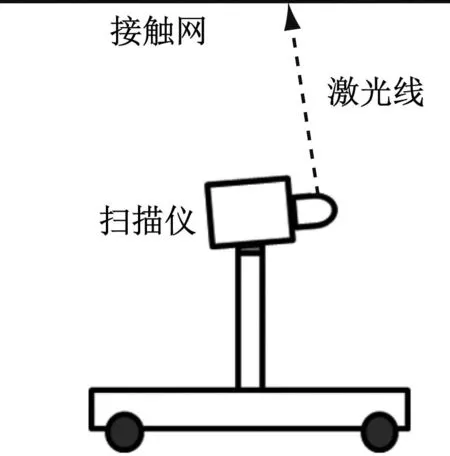
图8 改进的扫描仪扫描激光线入射示意图
2.2 点云投影模型
由于扫描仪采用线扫描模式进行数据采集,点云模型是由无数扫描断面拼接而成,因此当扫描断面不垂直于隧道中线时,扫描断面为图9中的虚线椭圆,而非隧道真实结构。欲得到隧道真实点云模型,需要对实测断面进行等角兰勃特投影。改进扫描仪后,隧道扫描断面的等角兰勃特投影断面如图9所示。由于刚性倾斜组件的倾斜角度是预先设定的,故可根据已知倾斜角度对扫描断面进行投影。

图9 等角兰勃特投影断面
2.3 降噪效果
为了验证加装刚性倾斜组件后的扫描仪检测精度提升效果,采用无倾斜组件的扫描仪和有倾斜组件的扫描仪,分别对同一区域进行扫描,并对采集数据进行处理和比较。加刚性倾斜组件后得到的投影断面如图10所示。对比图5和图10可见,增加倾斜组件,可有效降低因激光脚点垂直入射接触网发生散射和漫反射而产生的毛刺等噪点,进而提高导高检测精度。
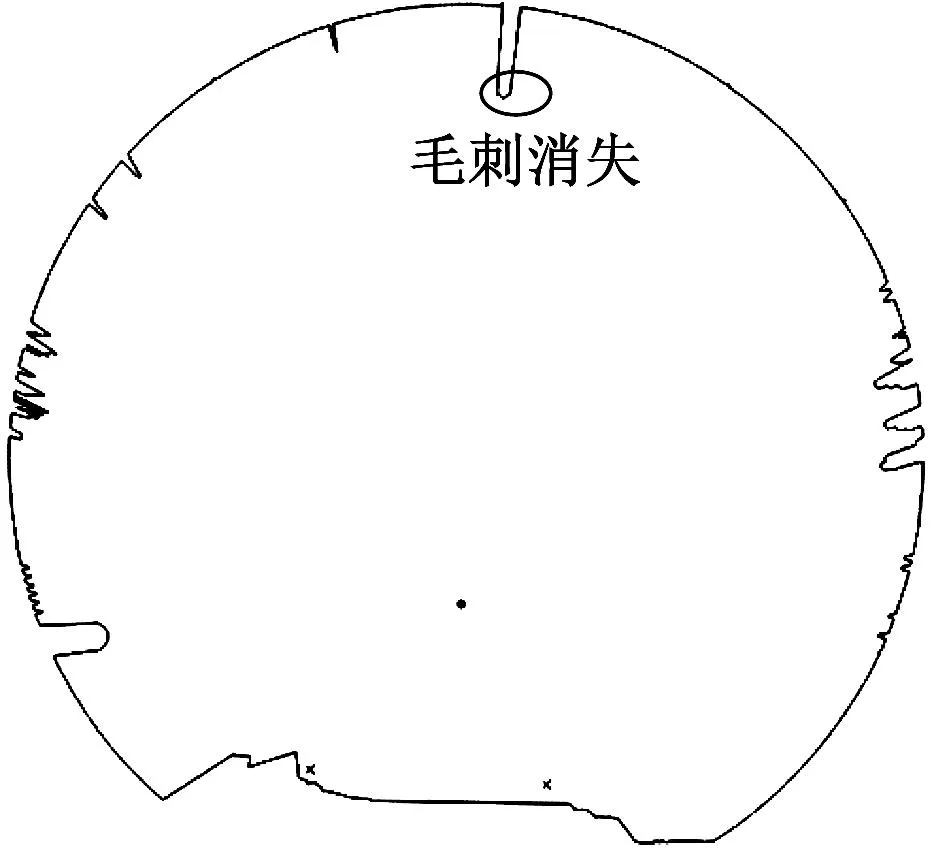
图10 加刚性倾斜组件时的投影断面
3 降噪后扫描仪的检测精度验证
为了验证加装刚性倾斜组件后的扫描仪检测精度,本研究分别使用导高仪和扫描仪测量,采用导高仪对改进后扫描仪的导高检测结果进行验证,将同一位置处的导高进行对比。
3.1 验证步骤
为验证检测结果的准确性,本测试采用固定点测量,保证导高仪和扫描仪严格测量同一位置处的导高值和拉出值。
验证的具体步骤如下:
步骤1 选取测量位置。测量位置应选在地质情况比较好的区间内,以避免在详测时因工程地质问题发生较大变动。以每10环确定一个测量位置,并用石笔标记。
步骤2 现场记录。推动导高仪,按照步骤1选取的测量位置,采用外业记录表记录测量位置里程;推动扫描仪到测量位置,测量导高和拉出值,并用外业记录表记录相应测量位置处的里程、环号、导高、拉出值。
步骤3 内业处理。利用Amberg Rail内业处理软件提取导高仪测量位置对应断面,并将断面导入CAD软件中,利用量距功能量取接触网导高和拉出值,与扫描仪的测量数据进行对比。
3.2 导高检测结果
3.2.1 检测结果对比
检测精度验证共选取69个检测断面(第1环—第680环)的导高和拉出值进行对比测量。不同设备的导高检测结果对比如表2所示。
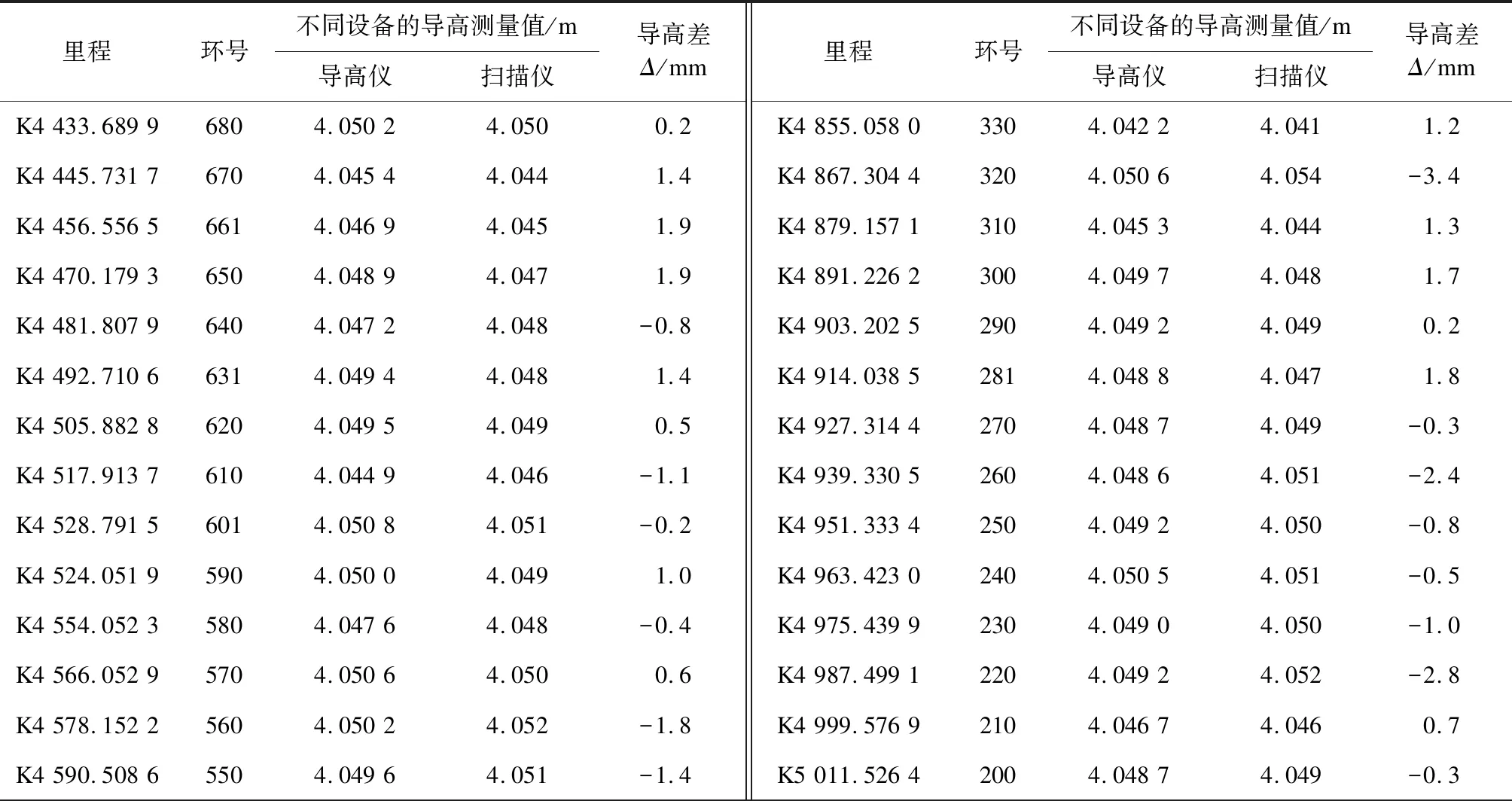
表2 不同设备的导高检测结果
3.2.2 数据统计分析
由表2数据可得导高差Δ的统计结果,如表3所示。
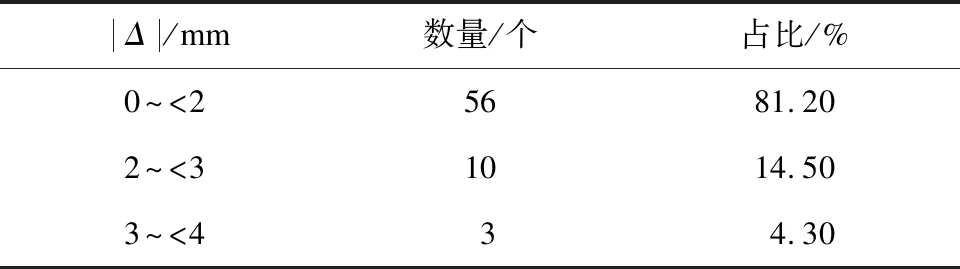
表3 Δ的统计结果
由表3可见,扫描仪的导高检测精度基本在±3 mm以内。根据GB 50299—2018《地下铁道工程施工及验收标准》,地面导高允许偏差为±30 mm,隧道内导高允许偏差为±10 mm。对比表1和表3可见,改进后的扫描仪导高检测精度有所提高,已满足相关要求。
4 结语
本文基于移动扫描仪技术提出了地铁隧道接触网导高检测的新方法,并分析了误差来源;通过增加刚性倾斜组件来改变扫描仪激光线入射角度,进而减少扫描断面毛刺数量,并采用等角兰勃特投影来获取隧道真实点云模型。与导高仪的测量对比结果表明,改进后的扫描仪精度基本为±3 mm,满足相关规范要求,为实现快速、高精度、不接触、无盲区的地铁隧道导高检测提供了保障。