两级融合的多传感器数据融合算法研究
2024-02-22彭道刚段睿杰王丹豪
彭道刚,段睿杰,王丹豪
上海电力大学自动化工程学院,上海发电过程智能管控工程技术研究中心
0 引言
针对单一传感器难以实现对目标的全面感知描述的问题,多传感器数据融合技术通过整合不同传感器的信息,以及采用适当的融合方法,为更全面、可靠的目标信息获取提供了有效手段[1]。这一技术在各领域得到广泛应用,成为信息处理和感知的关键方法。
在实际监测环境中,为提高生产运行物理量的监测效率,减少由于内外界干扰因素对数据采集的影响,常采用多个传感器相互协作对现场监测,对此,国内外学者将多传感器数据融合技术应用到监测场景。文献[2]提出了一种依据正态性参数的贝叶斯估计数据融合方法,但由于贝叶斯估计需要准确的先验信息,若这些信息获取不准确会影响估计的可靠性。文献[3]提出基于卡尔曼滤波的多传感器信息融合用于火灾检测系统。卡尔曼滤波主要用于低层次融合,面对组合信息量大量冗余情况会影响融合的精度。文献[4]提出基于D-S证据理论的多传感器信息融合方法,在实际应用中很难精准评估证据可信度和权值,这将影响结果的准确可靠。文献[5]提出了一种基于模糊证据理论的数据融合算法,然而模糊理论的结果依赖于模糊量方法的选择和设计,不同的模糊量方法可能导致多样化的融合结果。文献[6]将智能算法与BP神经网络结合起来,并融合用于火灾感知的多传感器数据。针对BP神经网络在训练过程中易陷入局部极小的问题,文献[7]提出了基于启发式萤火虫的BP神经网络数据融合算法,利用改进萤火虫算法优化BP神经网络结构,将优化后的权值和阈值赋值给神经网络进行融合,但启发式萤火虫优化算法需要进行繁多的迭代搜索,收敛速率较慢,将影响系统实时性。
针对上述融合方法的不足,本文设计了一种两级融合的多传感器数据融合方法。实验结果表明该融合方法极大程度降低系统误差,增加信息完整性和可靠性,在各监测领域具有较高的实用性和推广价值。
1 数据融合模型构建
多传感器数据融合技术可被视为一种模拟复杂问题综合处理的方法,针对单一传感器远不能对复杂系统形成全面完整的感知描述,多传感器数据融合用于综合来自多个传感器或源的信息,利用多传感器对目标进行多层次、全方面的信息收集[8],结合适当的融合方法,从而获得的信息远比使用单一传感器获得的信息更全面、可靠,最终形成工业企业的综合安全决策分析报告。在一定程度上,提高了系统的评估和决策能力,提升了监控性能,这明显优于传统的工业安全监控方法。
针对智慧工厂环境监测需求,本文提出了一种多传感器数据融合算法模型,如图1所示。该模型基于卡尔曼滤波算法和自适应加权平均算法实现同类型传感器数据融合,通过人工兔优化算法优化ELM神经网络对不同类型传感器的数据进行融合。对于同类型传感器,将每个传感器采集到的数据先进行卡尔曼滤波处理,将其输出当成自适应加权平均算法的输入,最终得到单输出的最优值。然后,将不同类型传感器经自适应加权平均得到的最佳值传入到人工兔优化ELM神经网络中,最终得到对环境起监测作用的预测值。该模型能够有效地处理多传感器数据的融合,并且通过优化ELM神经网络算法提高了环境监测的准确性。

图1 多传感器数据融合模型
1.1 一级融合方法
在工业场景中,需要采集多个传感器的数据来监测不同的工艺参数。这些传感器具有不同的特性,可能导致数据之间存在较大的差异。因此,需要对多个传感器采集的数据进行融合处理以提高数据的准确性和稳定性。同类型传感器的一级融合是指对多个同类型的传感器采集的数据进行融合处理,以降低噪声、提高数据精度和稳定性。本文提出一种基于卡尔曼滤波算法和自适应加权平均算法的同类型传感器数据融合方法,为二级决策融合提供准确的真值信息。
1.1.1 卡尔曼滤波融合方法
在实际监测场景下,传感器采集数据常受到噪声干扰,导致数据的准确性和稳定性下降。为此,本文运用卡尔曼滤波算法对同类型传感器数据进行融合处理,该算法通过先验估计和后验观测值的预测和滤波处理[9],能够降低噪声和不确定性的影响,提高传感器数据的精度和稳定性,从而有效地解决了实际监测场景中传感器数据不稳定的问题。
卡尔曼滤波算法主要步骤包括预测和更新两个阶段。在预测阶段,通过状态转移方程,根据上一时刻的状态估计和系统的动态模型,预测当前时刻的状态估计和协方差矩阵。即:
(1)
(2)

在更新阶段,根据观测方程和传感器采集的测量数据,对预测估计值和协方差矩阵进行修正。即:
(3)
(4)
Pt|t=(I-KGHt)Pt|t-1
(5)

1.1.2 自适应加权平均融合方法
在处理同类型传感器采集数据时,由于传感器之间存在差异,需要对采集的数据进行融合以提高准确性。卡尔曼滤波算法可以降低噪声和不确定性,但不能解决传感器之间的差异。因此,本文采用自适应加权平均算法[10]对经卡尔曼滤波后的数据进行处理,以更好地反映真实值,通过对不同传感器数据的加权平均,可以进一步提高融合结果的精度和稳定性,为二级融合提供更加可靠的数据。自适应加权平均融合模型推导过程如下。

其中,总方差如式(6)所示:
σ2=

(6)
因各传感器处于检测环境中不同位置,可近似认为各传感器数据相互独立,故有式(7)、式(8):
E[(X-Xi)(X-Xj)]=0 (i≠j)
(7)
(8)
由式(8)可知,总方差是一个关于加权系数的多元二次函数,因此有一个最小值,根据多元函数的极值理论,总最小方差对应的加权系数为
(9)
此时最小总方差为
(10)
由式(11)得到融合值:
(11)

1.2 二级融合方法
在对不同类型传感器的二级融合中,由于不同传感器之间的数据具有不同的特征,因此传统的融合算法难以处理这些数据。针对这一问题,本文提出了一种基于ARO优化ELM神经网络的融合方法,通过对一级融合后的同类型传感器数据进行学习,建立了一个适合不同类型传感器数据融合模型,实现了对不同类型传感器数据的融合处理,从而提高数据融合的准确性和可靠性,以及对数据采集环境的更好监测。
1.2.1 极限学习机(ELM)
ELM是G.B.Huang等[11]提出的一种快速高效的单层前馈神经网络(SLFN),与其他人工神经网络等机器学习模型相比,具有收敛速度快、泛化能力强等优点,由输入层、隐藏层和输出层构成。在本文提出的二级融合中,输入层的数据包括经一级融合处理后的温度和液位传感器数值,在ELM正向传播中,将输入层的温度和液位数据传递给隐藏层,隐藏层使用一组随机初始化的权重和偏置进行线性变换和激活函数处理,最终输出层将处理后的数据作为融合后的结果输出。ELM网络的数学模型描述如下。
假设ELM在训练数据集中有N个不同样本Xi、Yi,其中Xi、Yi分别表示输入和输出向量。具有L个隐藏神经元和激活函数g(x)的ELM在数学上建模为
(12)
式中:Wj和bj分别为输入权重和偏置;Wj·Xi为两者的内积;βj为输出权重。
式(12)可改写为
Y=Hβ
(13)
式中:H为ELM的隐藏层输出矩阵:β为输出加权矩阵,β=[β1,…,βL];Y为矩阵目标输出,Y=[Y1,…,YN]。
(14)
根据Moore-Penrose广义逆矩阵的定义,可以求解输出权矩阵的广义逆矩阵,其中H+为矩阵H的广义逆矩阵,求解方程如下:
β=H+Y
(15)

通过采集温度、液位参数进行ELM的模式训练,共采集100组数据样本,随机选择80组作为训练样本,剩余20组数据作为测试样本。根据上述经验公式采用试错法确定合适的隐藏层神经元个数,其均方根误差对比结果如表1所示。结果表明:神经元个数为8时,两种采集物理量均方根误差综合最小。
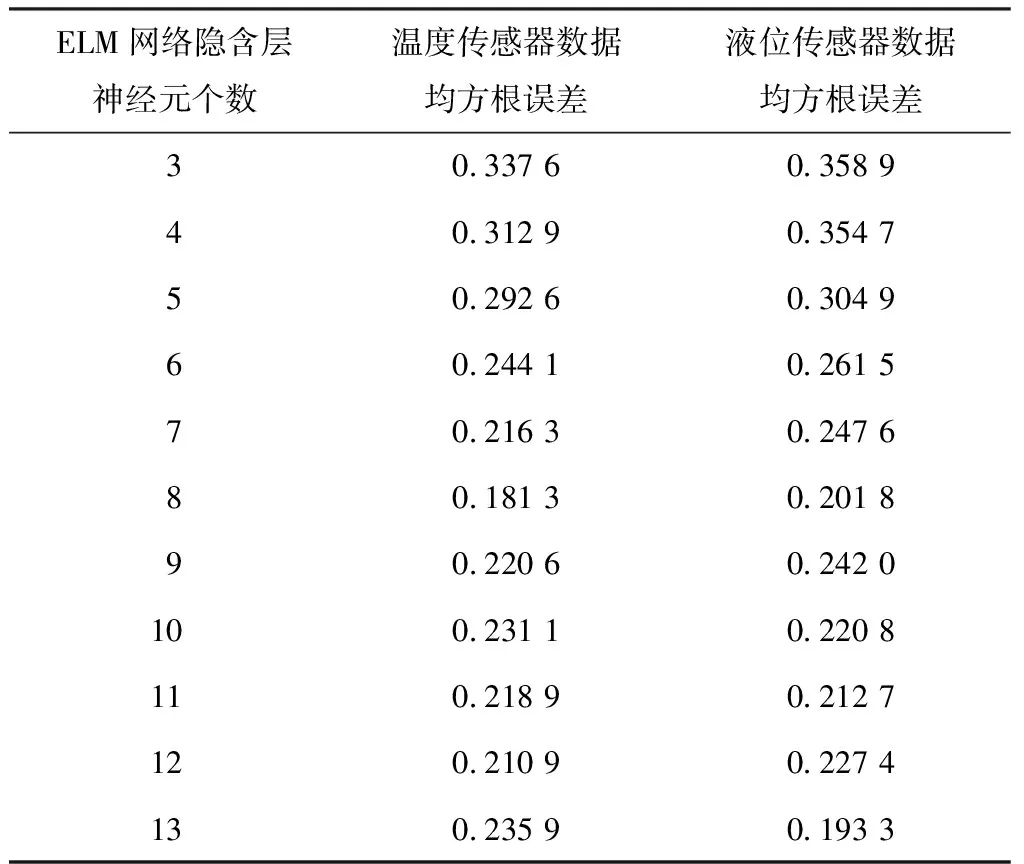
表1 不同隐含层节点数的ELM对应的均方根误差
1.2.2 人工兔优化算法(ARO)
尽管极限学习机与其他人工神经网络等机器学习模型相比,具有收敛速度快、泛化能力强等优点,但隐藏层的阈值以及输入层和隐藏层之间的权重是通过随机化生成的,不同的初始参数对模型的融合预测精度产生不同影响,因此有必要采用适当的优化算法来优化ELM模型参数,以提高结果精度。人工兔算法模拟了兔子的自然生存行为[13],有两种主要的生存模式,包括迂回觅食和随机隐藏,同时由于能量逐渐耗尽,兔子的行为从觅食转变为隐藏。
1.2.2.1 迂回觅食
兔子的数量作为种群数量,每只兔子都有自己的觅食区,里面有其食物以及洞穴。每只兔子随机前往其他兔子洞穴寻找食物。在该模式下,每只兔子都有向随机选择的个体更新其当前位置的趋势,这种行为可以公式化如下:
(0.05+g1))·R
s=1,2,…,R,q=1,2…,R且q≠1
(16)

ρ=E·e
(17)
式中:E为寻找食物过程中的移动距离;e为一个映射向量,其可帮助算法在觅食行为中随机选择随机数量的搜索个体元素进行突变。
(18)
(19)
h=randperm(b)
(20)
n1~N(0,1)
(21)
式中:g为(0,1)随机数;T为迭代的总次数;b为维度;randperm为随机排列函数;n1服从标准正态分布。
同时应用扰动有助于ARO算法进行高效的全面搜索,并避免陷入局部极值。
1.2.2.2 随机隐藏
兔子执行随机躲藏以避免被捕食者发现,兔子在其周围挖掘一些洞穴。在每次迭代中,兔子在搜索空间中挖掘b个洞穴,然后随机选择一个洞穴来躲藏其中,以欺骗捕食者。这种行为可以描述如下:

s=1,2…,R,q=1,2…,b
(22)
(23)

标准正态分布n2为
n2~N(0,1)
(24)
随机排列函数Φ(w)为
(25)
与此同时,兔子常常会受到捕食者的追逐和攻击。为了生存,兔子需要找到一个安全的地方来躲藏。因此,它们倾向于随机选择一个洞穴作为躲避的地方,以避免被捕捉到。为了对这种随机躲藏策略进行数学建模,提出了以下方程式:

s=1,2…,R
(26)
随机排列函数hg(w)由式(27)得出,其中[g5·b]表示g5和b的内积:
(27)
(28)

在完成觅食和躲藏动作后,第s只兔子的位置更新为
(29)
1.2.2.3 能量衰减
在ARO中,兔子总是倾向于在迭代的初始阶段频繁地进行迂回觅食,而在迭代的后期频繁地进行随机隐藏。这种搜索机制是由于兔子的能量逐渐衰减产生的,能量组成部分公式如下:
(30)
式中σ为(0,1)中的一个随机数。
能量组成部分的高值表示兔子具有足够的能量来进行觅食行为,而能量组成部分的低值表示兔子没有足够的能量来进行觅食行为,因此它会进行躲藏。
1.2.3 ARO-ELM模型
在多传感器数据融合应用中,ELM隐藏层的阈值以及输入层和隐藏层之间的权重是通过随机化生成的,因此会造成其性能不稳定、融合预测精度差等问题。为了解决这些问题,本研究使用ARO算法优化ELM神经网络,并利用ARO-ELM神经网络进行不同类型传感器的多传感器数据融合,以对工业环境进行监测。首先,使用ARO来优化ELM的初始阈值和权值,然后,利用优化后的阈值和权值,通过ELM网络进行训练和测试,得到融合预测数据,从而达到对工业环境进行监测的目的。图2展示了基于ARO-ELM的多传感器数据融合模型。这种方法可以有效提高ELM神经网络在多传感器数据融合应用中的性能和效果,为工业环境监测提供更为可靠和精准的数据支持。
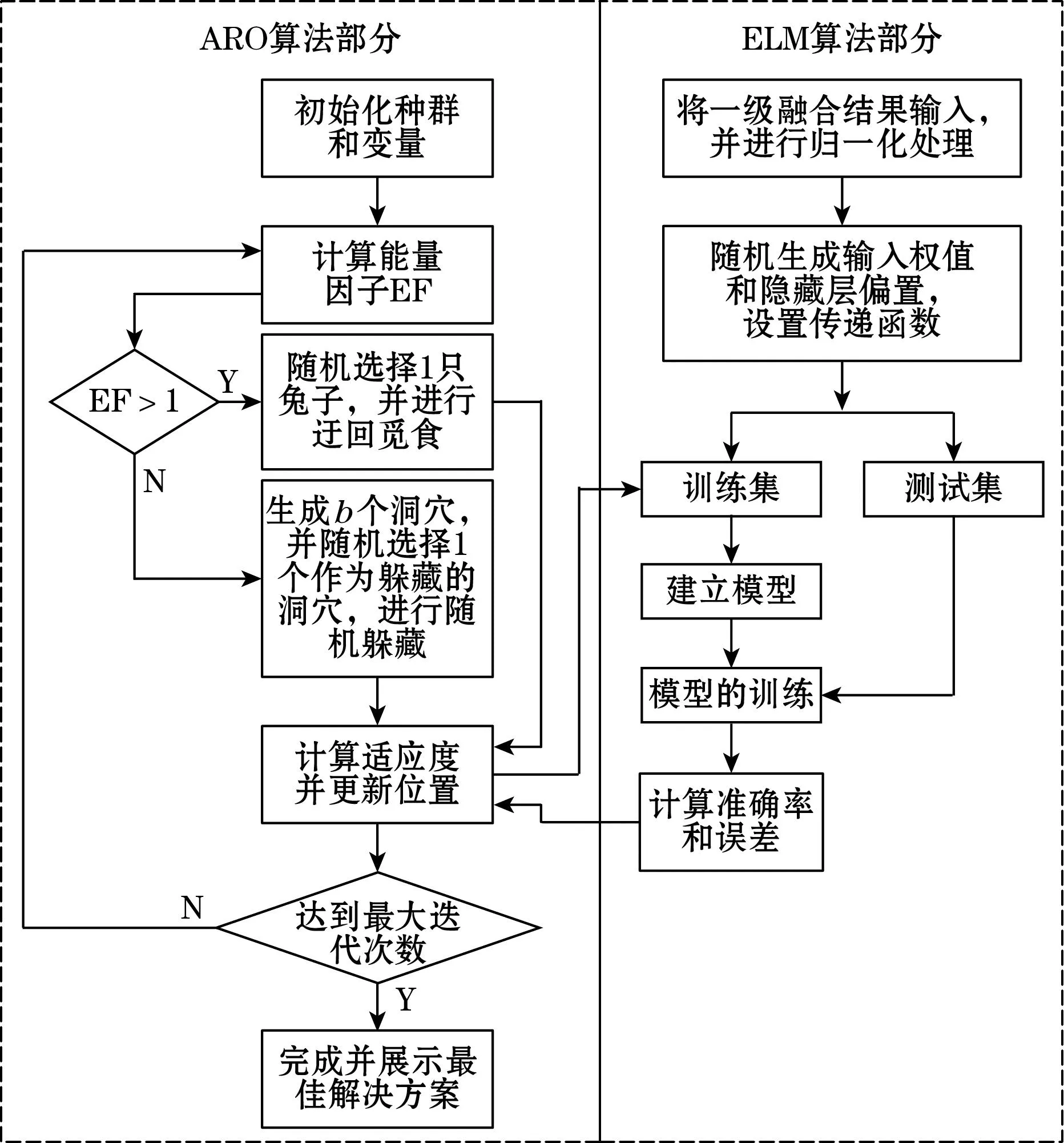
图2 基于ARO-ELM的数据融合流程
2 融合算例分析对比
2.1 一级融合结果分析
为了评估本文提出的基于卡尔曼滤波算法和自适应加权平均算法的同类型传感器数据融合方法的有效性,通过将3个温度传感器连接到数据采集设备,并在HH-W600恒温水箱中设置水温100 ℃进行实验来仿真模拟。使用MATLAB对实验数据进行处理,融合结果如图3所示。
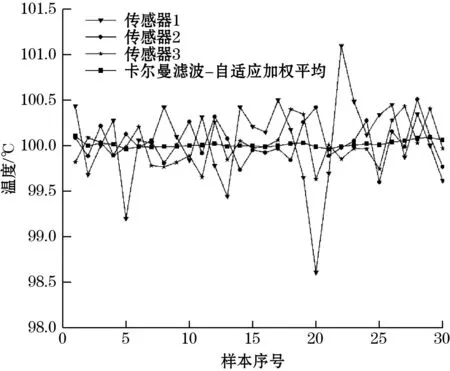
图3 一级融合效果图
由图3可知,传感器1、2、3的采集值相对沸点值100 ℃存在显著误差。经过卡尔曼滤波算法和自适应加权平均算法融合处理后,数据值明显逼近真实值。这表明,本文所提出的融合算法可以有效降低误差,提高传感器数据的准确性和稳定性。
为了验证本文提出的基于卡尔曼滤波算法和自适应加权平均算法实现同类型传感器数据融合的优越性,分别单独使用卡尔曼滤波算法与自适应加权平均算法融合来自3个温度传感器采集的30组数据,3种算法对比结果如图4所示,误差对比如图5所示。结果表明,基于卡尔曼滤波算法和自适应加权平均算法满足同类型传感器数据融合过程中对数据处理的要求。

图4 3种算法融合结果对比
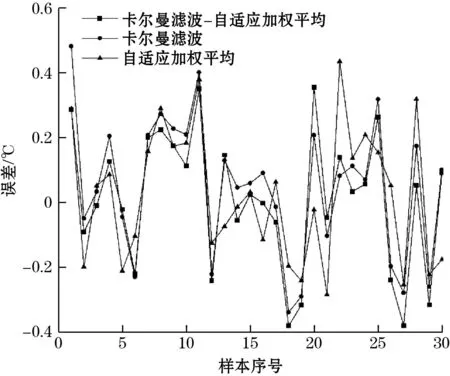
图5 误差对比
2.2 二级融合结果分析
为验证ARO-ELM算法对多传感器二级决策融合的预测效果,本文采用温度传感器和液位传感器各3个,共采集了来自HH-W600恒温水箱的100组数据,经过一级融合处理,将融合后的数据作为二级融合的输入,其中80组数据用于训练,剩下的20组数据用于测试,设置ARO种群数量为50,最大迭代次数为30。选用MATLAB2021作为仿真平台,分别建立ELM和PSO-BP[14]算法模型,经过同一数据集训练和测试得到融合预测结果。ELM算法、PSO-BP算法、ARO-ELM算法的真实值与预测值之间的结果如图6所示,误差对比分析如图7所示。
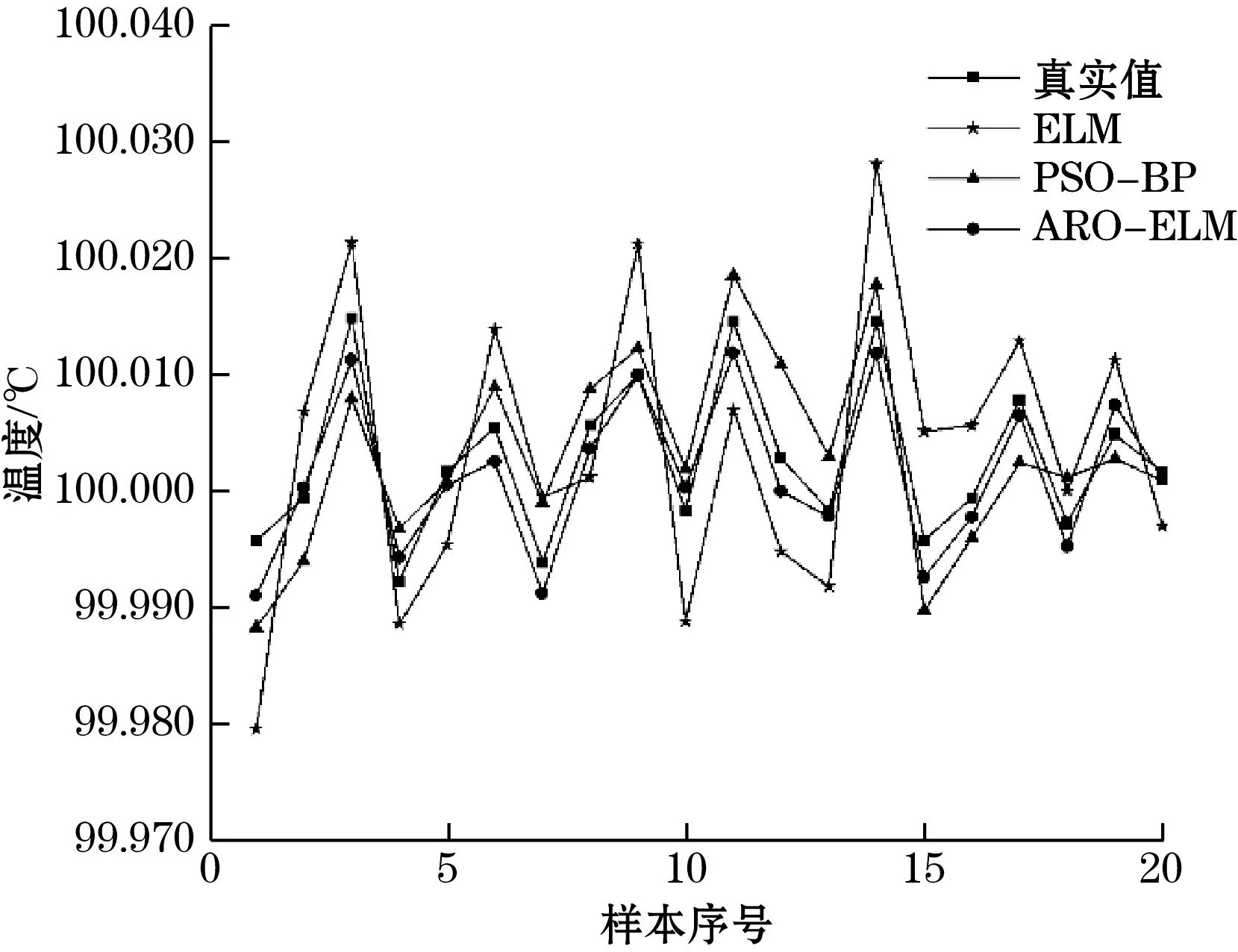
(a)温度对比

(a)温度误差对比
由图7可以看出,上述3种算法在预测程度上均有不错的效果,但本文提出的ARO优化ELM神经网络模型处理后的数据更接近真实值。
为进一步评价上述方法的性能,计算3种融合模型的MSE、MAE、MAPE、拟合度R2以及算法平均运行时间进行评价。ELM、PSO-BP、ARO-ELM 3种算法预测的指标比较如表2~表4所示。从表2~表4可以看出,ARO-ELM算法模型在上述4个性能指标对比上均优于ELM算法模型和PSO-BP算法模型,经过ARO优化ELM神经网络后的温度传感器和液位传感器的平均绝对百分比误差(MAPE)分别为4.061%、6.593%,具有较好的优化效果。同时,实验表明,ARO-ELM在算法运行时间上具有较快的速度,这有助于多传感器数据融合技术的快速响应和计算效率,从而实现及时响应和高效处理大规模传感器数据,对推动智能监测和决策应用的发展起到积极作用。
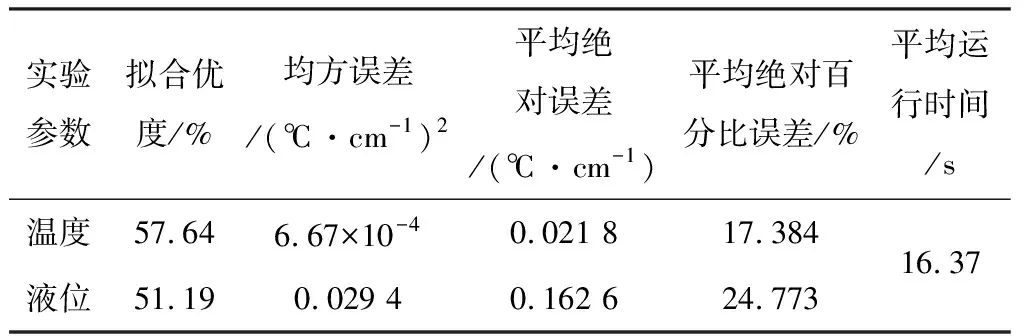
表2 ELM算例性能分析

表3 PSO-BP算例性能分析

表4 ARO-ELM算例性能分析
3 结束语
针对多源数据融合准确性和可靠性问题,本文提出了一种两级融合的多传感器融合方法,通过实验分析得出如下结论:
1)在同类型传感器数据融合领域,将卡尔曼滤波算法和自适应加权平均算法结合使用,可以发挥两种算法的优点并克服各自的局限性。卡尔曼滤波算法可以提供初步的数据处理和预测,而自适应加权平均算法可以在此基础上进一步优化数据处理结果,充分考虑到不同传感器数据之间的差异性和异常数据的存在,从而实现更高的数据融合精度和更可靠的结果。
2)在不同类型传感器信息融合领域,相较于ELM神经网络和PSO优化BP神经网络算法,ARO优化算法可以有效解决ELM神经网络算法中随机初始化权重和阈值等问题,并且可以全局搜索最优解,从而提高融合精度和准确性。
综上所述,本文提出的多传感器数据融合技术具有良好的适用性和实用价值,在工业自动化等领域具有广阔的应用前景。
