基于北斗短报文的低功耗定位系统的设计
2024-02-22薛思琪任勇峰
薛思琪,任勇峰
中北大学,电子测试技术国家重点实验室
0 引言
定位系统是用于指示动力设备位置信息的装置[1]。目前,国内主流定位系统通常采用无线射频收发的方式将多个模块相互连接,实现落点指示[2],但离散模块稳定性差且容易受障碍物遮挡;程艳等[3]研发了定位通信一体机,保证了系统的稳定工作,但其通信频次为1 min/次,不满足飞行设备在测试过程中对位置多次捕捉的要求,因此未被广泛运用;何方城等[4]采用光继电器控制北斗双SIM卡切换,增加了通信频次。综上,现有的定位系统可实现定位和多频次通信,但传统方式的功率损耗过大,脱机工作时长不足24 h,无法满足外场试验的续航要求,实用性低。因此,降低功耗成为现有定位系统亟需解决的问题。
为解决上述问题,设计了基于北斗短报文通信的低功耗无线定位系统,在实现高精度定位、多频次通信的基础上,通过硬件设计和软件工作模式的切换共同实现定位系统的低功耗输出,延长了系统的独立工作时长,满足了动力设备降落过程中和落地后的长时间定位需求,增强了工作稳定性和实用性。
1 系统整体设计
定位系统采用模块化的设计思路,集GPS定位模块、北斗短报文通信模块、电源管理模块和数据处理模块于一体。如图1所示,在动力设备的下落过程中,系统首先通过GPS定位模块将实时位置回传给数据处理模块,该模块编帧信息后通过北斗短报文通信模块转发,最后用接收设备对报文接收并显示。

图1 定位系统组成框图
在整体设计过程中,分别从硬件和软件出发,综合实现低功耗输出。在硬件方面,选用低功耗器件控制功率损耗,在转发短报文的过程中使用多路复用器切换2张北斗SIM卡,将通信频次提高到2 min至少通信3次,减少因使用2路继电器所带来的程序混乱问题,提高了电路集成度。在软件设计过程中,通过增加“休眠工作”模式,实现与“正常工作”模式循环轮换,在通信频次达标后,关闭短报文发送功能,进入“休眠工作”状态,同时停止供电电池电量的检测。
2 硬件电路设计
2.1 主控模块设计
多数定位系统的主控模块选用单片机或FPGA芯片及其外围电路,其中FPGA作为硬件设计芯片,实时性高、灵活性好,但存在造价高、功耗大的缺点。而单片机作为主控芯片,控制性强,可以进行多任务实时处理且造价低、功耗小,非常适合小型低功耗设备。因此,选用型号为STM32L431的低功耗单片机,工作时耗电仅为0.1~280.0 μA,满足低功耗设计要求[5]。
以单片机芯片为控制器,使用内部UART串口及GPIO接口同装置内部及外部控制设备进行信息交互,包括RS422数据接口、RNSS导航电文接收、RDSS短报文发送模块、GPIO控制接口以及电池电压采集接口。主控芯片与外部硬件接口交互如图2所示。

图2 主控芯片与外部硬件接口交互图
2.2 GPS定位模块
为了满足动力设备的回收问题,在选择定位模块时除了定位精度之外,还需综合考虑功率损耗和动态性能。根据特性参数对比表1,CNS35H-202-J在动态条件满足机动载体需求的条件下,其他性能均优于另外2款模块,且CNS35H-202-J已在课题组中多次使用,技术成熟[6]。综上,定位系统的定位模块选择CNS35H-202-J。

表1 低功耗定位模块选择
定位模块外围电路分为电压转换和控制2部分。在电压转换部分,由于主控芯片STM32L431的工作电压(3.3 V)与CNS35芯片的工作电压(5 V)不匹配,需选用电平转换芯片MAX3232设计,如图3所示。该芯片在3.3 V供电下,电流仅为0.3 mA,满足低功耗设计需求。在控制部分,主控模块通过光继电器AQV252G2S控制接收机电路通断,在定位功能完成后及时断电,减小定位系统的功率损耗[7]。

图3 CNS35定位模块应用电路
2.3 北斗短报文模块设计
表2对比了TM0558与BDM9000性能。其中,TM0558芯片的通信成功率较高,所以选择其作为通信模块的主芯片。该模块采用邮票孔的表贴封装,集成度高,功耗低,且其内置相关的电源转换电路,外部设备仅需提供+5 V供电,即可正常运行,极大地降低了电路布局对PCB面积的要求,非常适合高度集成的定位系统设计[8]。

表2 低功耗北斗通信模块选择
如图4所示,为减少PCB占用空间且避免因使用过多的光继电器带来的程序混乱,选用了多路复用器交替切换双SIM卡的方式。选择ADG704多路复用器来实现切换控制。该芯片的工作电压为1.8~5.5 V,典型功耗小于0.01 W,接通时间仅为20 ns,断开时间仅为13 ns。较低的功耗和较快的开关速度使该器件适合信号切换应用。其切换原理为:系统上电后,主控模块通过使能ADG704芯片来选择S1、S2其中一路输出至TM0558的IC_SD端,完成切换。通过双卡切换使得报文的通信频次保持在31 s/次,满足2 min至少通信3次的设计需求且具有一定冗余时间,其交替切换的时序图如图5所示。

图4 TM0558短报文模块应用电路

图5 北斗SIM卡切换时序
2.4 电源管理模块设计
定位系统内部集成了互为备份的2块锂电池,单个电池电压为8.4 V,容量为950 mA·h,内部设计双路充电管理电路分别对双冗余锂电池充电,实际使用仅消耗电池电量的50%。主控模块对双电池分别进行电量采集,选择高电量电池为系统供电。如图6所示,系统的供电方案共有2种:一种为外部电源12 V供电,同时启动充电电路对内部8.4 V锂电池充电;另一种为外部12 V电源断开后,由内部锂电池为其供电,并利用二极管的导通特性进行供电选择。由于系统内部需要5 V、3.3 V供电,因此电路中加入8.4 V转5 V和5 V转3.3 V的稳压电路。

图6 电源及管理模块
综合考虑低功耗的设计需求和电池性能等因素,选择以智能充电芯片BQ24105为核心的充电电路,正常工作状态下自耗电电流不超过20 μA。充电电路图如图7所示[8]。
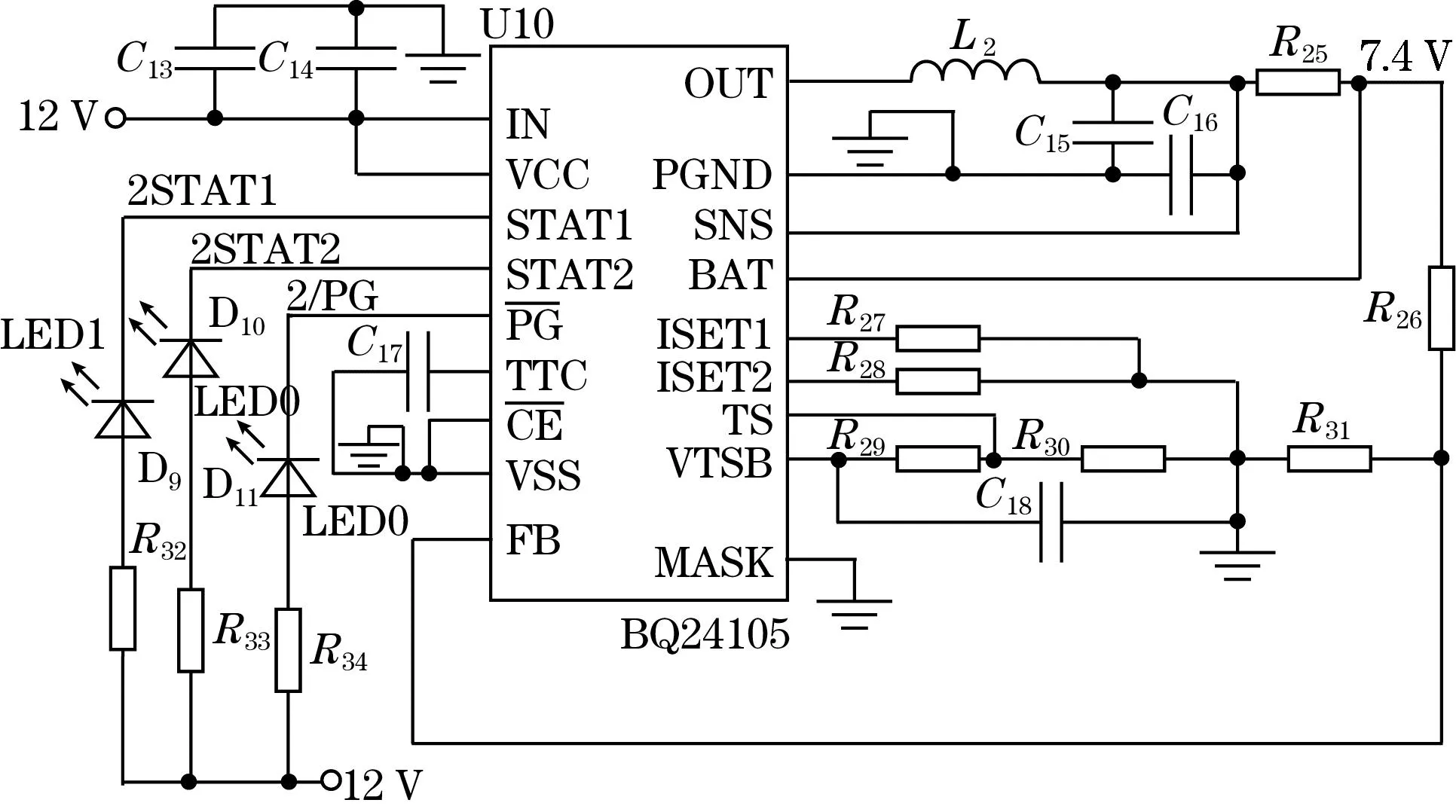
图7 锂电池充电电路
3 低功耗定位系统的软件设计
定位系统的软件设计核心是“正常工作”和“休眠工作”的双模式切换工作方式,通过该方式实现系统低功耗定位和通信功能。
3.1 双模式切换
系统一次循环时长设置为4 min,正常工作2 min,休眠工作2 min。在完成定位回采的基础上实现2 min至少通信3次。系统加电后,定位模块以1 s的频次实时刷新位置信息(定位失败则为无效信息),并将该信息和电池电压等信息编帧后发送给主控模块。若当前位置信息有效,则将其放在内部缓存队列中。
定位系统软件逻辑流程图如图8所示。当主控器采集到电池电量高于最低工作电压4.3 V时,定时器T1以此为零时刻开始计时工作,在“正常工作”模式的2 min内,通信计时T2若满足ΔT2≥31 s(SIM卡1发送完毕)条件时,控制多路复用器ADG704的A0、A1引脚从“01”切换至“10”,选择SIM卡2进行报文发送,双卡切换直至2 min内已发送短报文3次,此时RDSS通信链路进入“休眠工作”模式,若通信间隔不满足此条件,同样进入“休眠工作”模式。当定时器T1达到一个完整工作时长240 s时,T1,T2计时器清零。此外,从休眠模式转换到正常模式后,主控芯片的寄存器清零,之前存在的位置信息被清除,正常模式期间的定位信息只会被更新,不会被清除。

图8 定位系统软件逻辑流程图
若主控器采集到电池电量低于4.3 V,则表明电池无法满足系统的正常工作,该状态下定位系统关机。
3.2 定位信息提取
CNS35定位模块遵循NMEA-0183协议与主控模块进行信息交互。协议中的GNRMC语句涵盖了经纬度、高度、偏航角和速度等关键定位信息,本设计仅接收GNRMC语句[10]。如图9所示,当单片机接收到“”符号后接收数据锁存,开始接收语句,同时从接收到的数据首位开始检索,直至得到N个逗号的位置,并根据返回值来获取逗号位置的偏移量。语句接收结束后,接收标志位置位,根据协议中每个逗号后的信息数据类型,解析存储所需信息。若检测到定位状态为成功,则该标志置位。语句接收完毕后关闭UART2中断,在主函数流程中组帧完毕后再打开该中断。
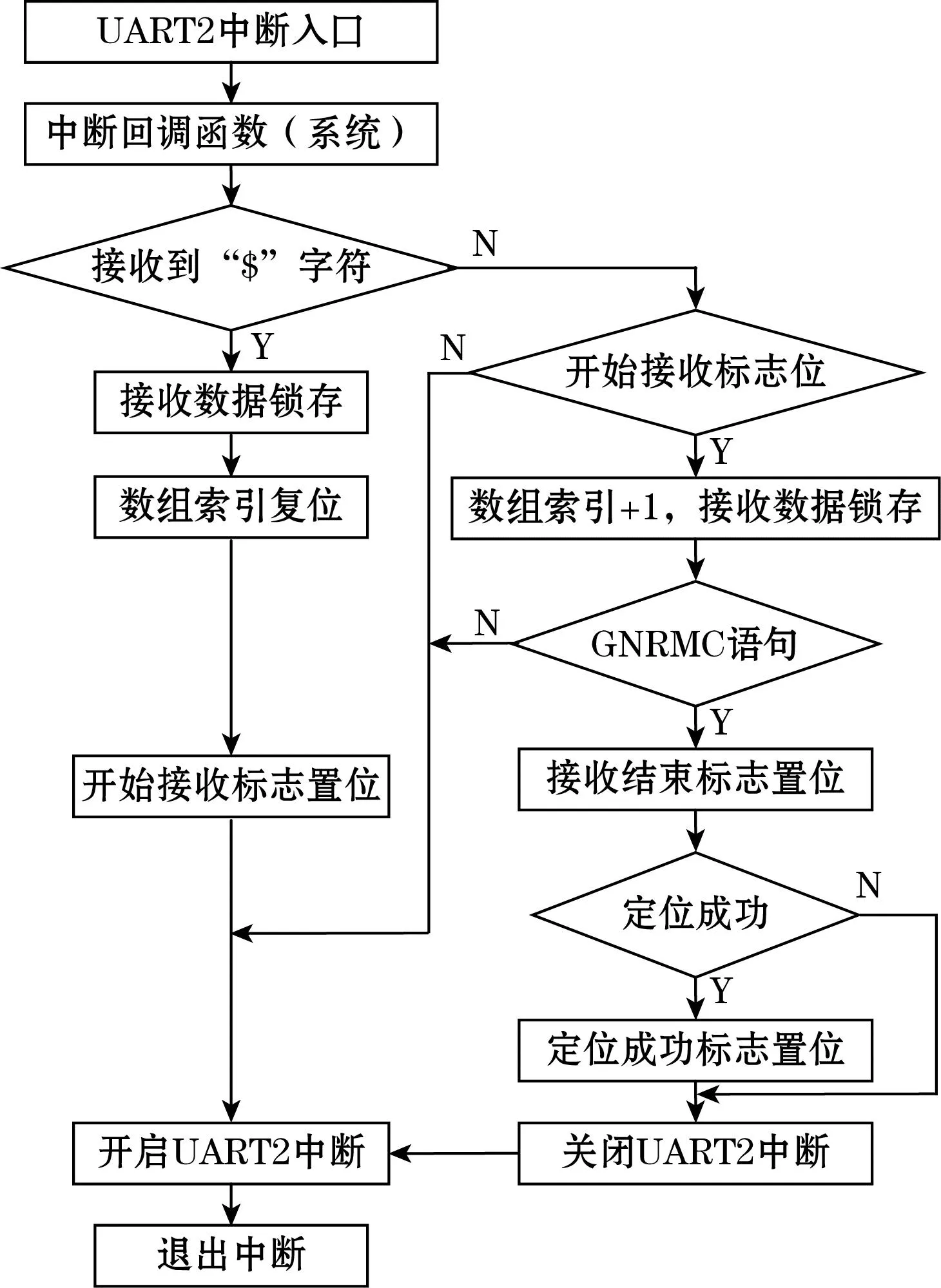
图9 定位信息接收流程
3.3 短报文编辑与发送
定位系统断电后,按照预设发送周期将位置信息发送给地面搜寻装置,当接收到导航数据中定位成功后,定位成功标志置位(WholeGPGGAReceiveStatus==Ture),主函数判断到定位成功标志置位后将导航数据中的经度、纬度和高度(高度精确为1 m)分离出来依次缓存入短报文发送队列(队列中内容去掉‘,’分隔符),短报文队列中需依次缓存3条位置信息,并按照“旧-次新-新”顺序进行排列,该队列实时更新。流程如图10所示。

图10 短报文发送流程图
4 整体测试及性能验证
4.1 定位系统基本功能测试
定位系统和地面接收设备实物图如图11所示。在验证低功耗性能之前,需要对系统的定位和通信功能的实现进行测试。

图11 定位系统及地面接收终端
4.1.1 定位精度测试
定位精度是定位系统的重要指标,决定着其搭载的动力设备的回收效率。本次测试对中北大学不同地点进行了定位测试,如表3所示。通过比例尺1°(N)≈111 km,1°(E)≈85.39 km计算与实际位置坐标定位误差。由表3可知,定位模块的最大误差不超过2.5 m。为直观表现系统的定位精度,如图12所示,将理论值和实测值作图表示。图中理论值为百度地图显示值。

表3 系统定位精度测试

图12 定位实测值与理论值对比图
4.1.2 通信接收测试
在测试时,需保证系统在断电之前定位成功,并通过RS422接口将定位信息反馈回来,可实时观测电池电压、定位状态、电源在线情况及定位后的位置坐标。如图13所示,“5 A”表示外部电源12 V离线、锂电池在线状态,“D1、D0”表示锂电池电压值,“31、31、36”表示定位成功且搜星颗数为16颗。“4E、45、4D”分别表示北纬N、东经E以及海拔高度M,其余为具体位置坐标,经过ASCII码转码后的位置坐标为:东经112°36.03109′、北纬 37°44.06492′、海拔高度785.3 m。
图14为接收设备接收到反馈的时间。可验证定位装置的工作流程,地面接收设备在T1时刻接收到SIM卡1发送的信息,在T2时刻接收到SIM卡2发送的信息,并设置T1+2 min后以次/32 s的频次接收双卡交替发送的信息。

图14 双SIM卡交替通信测试图
在定位成功后,模拟定位系统弹出及其在下落过程中的工作状态,按照工作流程测试通信功能。通过对多台装置不同地点、不同时间段的重复测试,统计系统在不同方向下的定位时长及10 min收到的短报文个数。记录结果如表4所示。根据设计逻辑可知,10 min内发送的通信申请为20条。测试结果表明,定位系统在朝北环境下的通信质量相对较差,通信成功率≥85%,定位时长<50 s。

表4 系统通信成功率测试结果
4.2 定位系统低功耗测试
为了验证定位系统的低功耗性能,表5和表6分别对比了模式1和模式2,即“正常工作-休眠工作”各2 min循环工作和保持“正常工作”4 min 2种工作方式下的系统功率损耗、能量损耗以及工作时间。测试开始前,需保证系统断开外接供电,仅由2块8.4 V的锂电池供电。

表5 不同工作模式下系统功耗计算

表6 不同工作模式下系统能耗和工作时长计算
系统的功耗由供电转换、主控模式切换、供电管理、定位与通信功能产生。其中,由于北斗短报文模块TM0558的供电电压为5 V,主控STM32L431和定位模块CNS35的供电电压为3.3 V,因此5 V转3.3 V的功耗存在于主控模式切换和供电管理部分,12 V转5 V的功耗仅存在于北斗通信部分。
主控模式切换包括正常工作和休眠工作2部分,其中,正常工作的输出电流I1=3.07 mA,根据P=UI,功耗为P1=9.2 mW;休眠工作的输出电流为I2=0.5 mA,功耗为P2=1.65 mW。根据W=Pt,可得正常工作2 min-休眠工作2 min和正常工作4 min需要的能量分别为1 104 mW、198 mW和2 208 mW。同理,可计算出剩余模块的所需能量值Wa、Wb,分别为供电管理模块和GPS定位模块的能量损耗,其中GPS定位模块启动时间为13 μs,功耗为2 W。
在5 V转3.3 V的过程中,锂电池需提供的实测能量为Wr,计算式为
(1)
式中:Wc为主控模块能耗;Wd为模式切换能耗;Ui为实测输入电压,Ui=5.1 V;Uo为实测输出电压,Uo=3.3 V。
在单次循环为4 min的工作时长内,将2种工作方式下的能量各自相加可得5 V和3.3 V的电源消耗总能量,又因为12 V转5 V的转换效率η=70%,则利用η=W1/W,可得出4 min内系统消耗的总能量W。在设计过程中,锂电池加入了冗余处理,冗余量为a=1/2。由式(2)可得,电池可提供的总能量为WBAT,其中,电池电压VBAT=8.4 V,电池额定容量C=950 mA·h。最终,定位系统的脱机工作时长可由式(3)计算得出。
WBAT=VBAT·C·a×3 600
(2)
(3)

结果表明,系统在循环“正常工作2 min-休眠工作2 min”和持续“正常工作4 min”2种方式下的能量损耗和工作时长均有很大差别。双模式循环工作的能量损耗仅为持续“正常工作”方式的64.7%;在单次工作时间为4 min的前提下,前者可工作31.63 h,相较后者延长了11.16 h。加入“休眠工作”与“正常工作”双模式循环的工作方式有效地降低了功耗,提高了定位系统的续航时间。
5 结论
本文设计的定位系统以低功耗为核心,分别从硬件和软件设计对传统定位系统做出优化。硬件部分以STM32L431为主控器,选取低功耗GPS定位模块、北斗短报文通信模块,并设计了12 V和8.4 V双电池供电方案,降低了硬件电路的功率损耗;软件设计在保证GPS定位信息获取和短报文发送功能正常的前提下,加入了“休眠工作”模式,实现与“正常工作模式”的循环交替工作,减小输出损耗。测试结果表明:低功耗定位系统在实现定位误差低于2.5 m、通信成功率≥85%和2 min至少通信3次的基础上,将能量损耗降低至持续“正常工作”方式的64.7%,续航时间延长了11.16 h。该系统高精度定位、多频次、通信高成功率和低功耗的特点,使其具有切实可行性和更广泛的应用价值。
