基于ECA-CNN 的混合指纹室内定位方法
2024-02-20王正康骆冰清
王正康 骆冰清
(南京邮电大学计算机学院、软件学院、网络空间安全学院 南京 210023)
(1220045308@njupt.edu.cn)
随着无线传感器网络、移动智能终端的迅速发展,基于室内位置服务的需求越来越多,例如矿井施工人员位置发现、化工厂危险源检测、智能机器人服务、停车场寻车等. 但目前室内定位方法仍存在部署难度大、设备成本高以及定位精度低等问题,无法满足上述室内定位需求.
按照定位原理划分,目前室内定位技术可以分为基于测距的定位和基于指纹的定位两大类. 基于测距的定位方法[1]根据信号强度与传播距离之间的数学模型计算接入点与目标点之间的距离,再使用几何方法计算目标点位置. 但由于室内布局的复杂多变,人员活动频繁,信号强度与传播距离数学模型的准确度低,导致基于测距的定位方法精度较低. 在基于指纹的定位方法中,指纹特征和定位模型是影响定位精度的2 个关键因素.
基于指纹的定位方法中常用低功耗蓝牙(Bluetooth low energy, BLE)[2]、Wi-Fi[3]和ZigBee[4]等无线信号,其中接收信号强度指示(received signal strength indication, RSSI)和信道状态信息(channel state information, CSI)常被用来作为位置指纹特征.CSI 采集对硬件要求较高,且数据处理较为复杂,但数据维度高,能够表征较多的位置信息;RSSI 因其易采集、易处理的特性被广泛应用,但波动性强,易受环境影响[5].同时有文献采用可见光[6]、地磁[7]以及温湿度[8]等传感信息作为位置指纹特征来进行定位. 文献[6]使用可见光通信进行定位,虽然该方法具有较高的定位精度,但可见光通信需要专门的驱动装置对光信号进行调制,并需要光电二极管接收光信号,设备成本较高. 文献[7]使用地磁进行定位,将地磁序列中的时间特征融入到位置指纹中来弥补空间特征差异性小的不足,地磁信号虽然稳定性较高,但是不同位置之间的地磁信号的空间特征区分度不高,采用指纹法进行定位还需利用地磁序列中的时间相关性,增加了算法时间复杂度. 文献[8]在进行指纹法的定位时使用了温湿度信息,但温湿度信息只是对无线信号接收信号强度(received signal strength, RSS)的补充,由于周围环境对温湿度信息的影响比较大,单独的温湿度信息无法用于指纹法定位. 文献[5−8]研究表明,指纹法的定位中,作为位置特征的无线信号强度不稳定,单一采用无线信号强度作为指纹特征进行室内定位的精确度不高;传感信息具有稳定的优势,能够弥补无线信号的不足,达到较高的定位精度,但是单一的传感信息处理过程复杂,增加了设备复杂度或时间复杂度,并且传感信息的位置差异性不强,各位置之间指纹特征区分度不够.
针对上述单一指纹的问题,有研究使用多种类型的指纹来构建混合特征指纹进行定位[9-11]. 通过研究发现,混合指纹能够提高数据维度和位置差异性,使用多个指纹联合进行定位能够在一定程度上提高定位精度,但单一采用Wi-Fi,BLE 等无线信号进行联合或单一采用可见光、地磁场等传感信息进行联合,其波动性较大或特征差异性不强对定位精度造成的影响难以得到改善.
定位模型的构建方法是指纹定位方法中影响定位精度的另一个重要因素.k最近邻(k-nearest neighbor,KNN)算法[12-14]是一种有效且常用的指纹匹配方法,该算法选取与目标点之间指纹欧氏距离最近的k个参考点,将这k个参考点坐标的平均值作为目标点坐标,即实现了指纹定位. 但由于KNN 算法没有考虑目标点与不同参考点之间指纹欧氏距离会对结果的影响程度不同,造成定位精度的不准确,因此使用KNN 方法的室内定位技术定位精度较低.
加权k最近邻(weightedk-nearest neighbor, WKNN)算法[15]对KNN 算法存在的问题进行了改进,定位精度相比于KNN 有一定程度的提升.WKNN 算法根据参考点与目标点之间的指纹欧氏距离对选出的k个参考点赋予了不同的权值,解决了KNN 方法中存在的问题. 但当采用无线信号作为指纹特征时,无线信号的不稳定性使得该权值不能很好地反映参考点与目标点之间的匹配程度,因此对定位精度产生较大的影响[16-17].
针对WKNN 算法的问题,有研究使用卷积神经网络(convolutional neural network, CNN)来学习参考点与目标点的指纹特征[18-20],得益于CNN 在特征分类方面具有很好的效果,使用CNN 能够更加精准地对目标点与参考点进行匹配,相比于WKNN 在精度方面有所提高. 文献[18]使用Wi-Fi 信号强度作为指纹特征,采用CNN 进行指纹匹配,平均定位误差为1.05 m.文献[19]使用CSI 的时频矩阵作为定位特征,采用CNN 对指纹特征进行匹配,将定位建模成一个分类问题,平均定位误差为1.365 4 m.文献[20]采用深度CNN 对Wi-Fi CSI 图像进行匹配,得到目标点位置,在实验室环境中的平均定位误差为1.788 2 m.但是现有CNN 会对每个通道赋予相同的权重,不能有效地突出重要特征,使最终提取的特征表达能力不强,并且对于混合指纹特征,不能很好地捕获混合特征之间的相互依赖关系,无法最大限度地发挥混合指纹的优势,降低后续指纹特征匹配的准确度,进而影响定位精度.
本文针对上述问题,提出一种基于ECA-CNN 的混合指纹室内定位方法(hybrid fingerprint indoor localiza tion method based on ECA-CNN, ECACon-HF),主要贡献有3 点:
1) 使用可见光强度和BLE RSSI 构建混合特征指纹,降低BLE 指纹不稳定对定位精度的影响,并且增强不同位置指纹特征的区分度,提升指纹匹配的正确率,进而提高定位精度. 本文采用的可见光强度无需使用可见光通信技术获取,大大降低了设备复杂度.
2) 在CNN 中引入高效通道注意力(efficient channel attention, ECA)模块,构建ECA-CNN 定位模型,将目标点与各参考点进行匹配.ECA 模块可以自适应地提取指纹中的重要信息,增强特征表达能力,抑制环境干扰等无效特征;并且ECA 模块通过跨通道交互策略显式建模通道之间的相互依赖关系,捕获沿通道方向信息量最大的特征表示,融合可见光指纹与BLE 指纹中的位置关联性,充分发挥混合指纹的优势,提高指纹特征匹配的正确率.
3) 搭建实验环境,构建可见光强度和BLE RSSI混合特征指纹数据集,并在该数据集上验证了本文所提方法ECACon-HF 的有效性. 实验结果表明,ECACon-HF 在混合指纹上的定位精度高于在单一指纹上的定位精度,并且ECACon-HF 相比其他室内定位方法,定位精度具有明显优势.
1 相关工作
在使用混合特征指纹方面,文献[9] 使用Wi-Fi信号的RSS 和CSI 混合特征构建指纹,并使用克拉美-罗下界(Cramer-Rao lower bound, CRLB)证明了增加指纹类型能够提高定位精度,实验结果表明使用混合特征比使用单一特征定位精度提高了20.3%. 文献[10]使用地磁场和光强的混合指纹,并使用深度长短期记忆网络进行指纹匹配,在走廊和实验室环境下分别做了实验,实验室环境的精度大于走廊环境的精度,该文献还做了仅使用地磁数据的定位实验,证明了使用混合指纹的定位精度高于使用单一指纹的定位精度. 但是不同位置之间可见光和地磁场的指纹特征区分度不够,定位精度未能达到1 m 以内,并且该文献需要处理信号序列中的时间相关性,增加了时间复杂度. 文献[11] 提出了一种结合BLE和Wi-Fi 的定位方法,并且在KNN 的基础上提出了一种新的定位算法,称为i-KNN. i-KNN 算法首先根据BLE 设备与Wi-Fi RSS 的距离对初始Wi-Fi 数据集进行过滤,然后再使用KNN 算法对过滤后的Wi-Fi 指纹进行匹配,该文献并没有使用Wi-Fi 与BLE 构建混合特征指纹,并且Wi-Fi 和BLE 信号稳定性较差的问题仍然没有得到解决,该文方法的定位误差仍然在2 m 以上. 文献[21]提出Magicol 系统,将磁场强度和Wi-Fi RSSI 结合起来构建指纹图用于定位和跟踪. 但是由于使用KNN 方法进行指纹匹配会存在较大误差以及Wi-Fi 信号的不稳定,该文方法中90%的定位误差在3 m 以上. 文献[22]提出了一种磁场与可见光混合指纹图和一种鲁棒的扩展粒子群优化算法,但是80%的误差仅在1.7 m 以内.
在使用CNN 进行在线指纹匹配方面,文献[18]实现基于CNN 的室内定位方法,该文献使用Wi-Fi RSSI 指纹,并且使用一种基于连续小波变换的特征提取方法,平均定位误差为1.05 m. 文献[19]提出了第1 个基于CNN 的Wi-Fi 定位算法ConFi,该文献中CSI 组织成一个类似于图像的时频矩阵,并用作定位的特征,ConFi 将定位建模为一个分类问题,平均定位误差为1.365 4 m. 文献[20] 提出了第1 个采用深度CNN 进行室内定位的系统CiFi,该系统从5 GHz Wi-Fi 中提取CSI 的相位数据用于估计到达角,创建估计到达角图像来训练深度CNN,平均定位误差为1.788 2 m. 文献[23]提出了一种基于CNN 的Wi-Fi 指纹识别方法,以解决基于深度神经网络的方法对接收信号波动(由多径引起)的敏感性,该文献中的实验证明了该方法的性能优于基于深度神经网络的方法. 文献[24] 使用地磁场构建指纹数据库,并使用CNN 计算位置,CNN 将用户收集的地磁场数据与数据库匹配,并且设计了一种投票机制来组合来自多个CNN 的预测,并最终估计用户的位置. 文献[25]使用CSI 作为指纹图像来表达Wi-Fi 信号的空间和时间特征,同时,提出了一种基于CNN 和双因子增强变分贝叶斯自适应卡尔曼滤波器的室内定位算法,在复杂的室内环境下,利用时变测量噪声和过程噪声实现精确的位置估计. 文献[26]通过计算来自重要贡献Wi-Fi 接入点的不同RSSI 比率构建比率指纹,然后将比率指纹和RSSI 相结合构建混合指纹,以增强室内环境特征的表达. 此外,还构建了一个CNN 体系结构,用于从复杂的混合指纹中学习室内位置的重要特征. 使用CNN 进行指纹匹配的方法仍然存在对指纹中的重要特征表达不突出的问题,导致指纹匹配的准确度降低,影响定位精度.
ECA 模块可以应用于特征分类、目标检测、实例分割等领域. 文献[27]提出了一种新的高效通道注意力深度密集卷积神经网络用于对胃镜图像食管疾病进行分类,使用ECA 加强网络中的特征传播,以突出和提取与不同类型病变之间细微差异相关的特征. 文献[28]提出了一种有效用于小脑分割的通道注意U-Net 算法,该算法加入ECA 模块增强特征表示,抑制无效特征,并在不影响性能的前提下,大大减少了模型参数的数量. 文献[29]提出一种多目标跟踪方法,在主干网络中引入ECA 模块,可以自适应地提取图像中的重要信息,提高目标检测的准确度.
2 ECACon-HF 方法
本文提出的方法ECACon-HF,首先利用可见光强度和BLE RSSI 构建混合指纹,降低BLE 指纹不稳定的影响,并解决单一指纹位置特征区分度低的问题;同时,在CNN 中引入ECA 模块,构建ECA-CNN定位模型,增强混合指纹特征表达能力,更有效地利用混合指纹优势,从而提高指纹特征匹配的正确率.ECACon-HF 的总体框架如图1 所示.
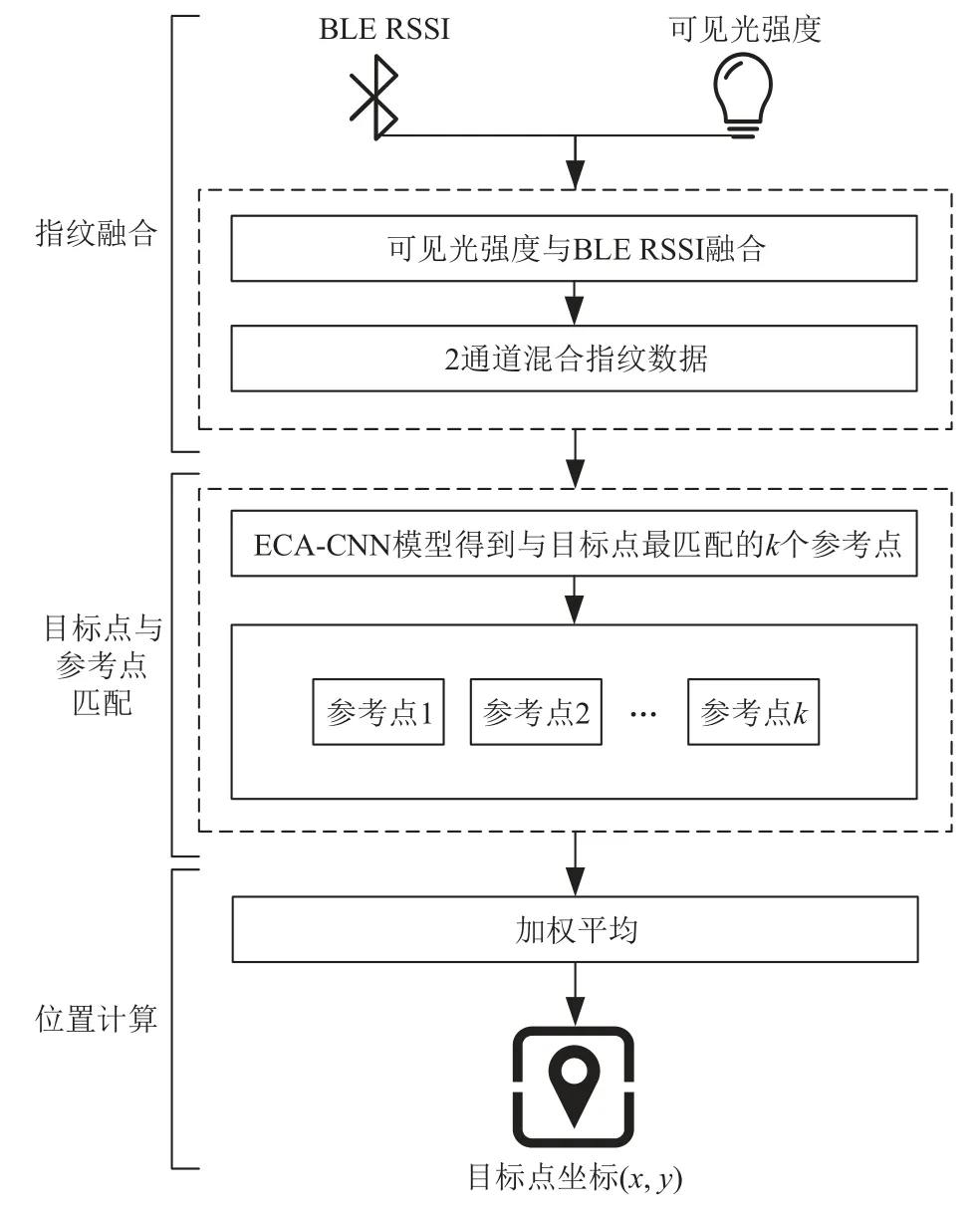
Fig. 1 Overall framework of ECACon-HF图1 ECACon-HF 总体框架
在指纹融合阶段,利用可见光强度与BLE RSSI融合构建混合指纹增强不同位置之间的特征差异性.本文将可见光强度与BLE RSSI 融合成2 通道的混合指纹,以便ECA 模块能够有效地捕获通道之间的相互依赖关系,提取可见光指纹与BLE 指纹中的位置关联性,充分发挥混合指纹的优势. 在目标点与参考点匹配阶段,通过训练好的ECA-CNN 模型得到与目标点最匹配的k个参考点,对与目标点最匹配的k个参考点坐标进行加权平均,计算出目标点坐标.
2.1 可见光强度与BLE RSSI 的混合特征指纹
可见光强度区别于可见光通信信号,它具有稳定性高且特征易采集的特性,但不同位置之间的特征区分度不强.BLE RSSI 特征相比于CSI 特征具有数据易处理和易采集的特性,同时在不同位置之间具有较高的区分度,但BLE 信号易受环境影响,具有较强的波动性. 本文提出使用可见光强度和BLE RSSI构建混合特征指纹. 一方面,在混合指纹当中,有效利用可见光强度的稳定性,可以弥补BLE RSSI 值波动对定位精度造成的影响;另一方面,通过使用混合特征可以增加特征维度,增强不同位置之间的特征差异性,从而改善仅使用单一可见光强度带来的不同位置之间区分度低的问题,进而提高CNN 模型的定位精度,减小定位误差. 具体指纹融合方法为:
1)将某位置的可见光光照强度数据表示为(l1,l2, …,lα),其中α为LED 灯的个数,li表示第i个LED灯在该位置处的光强度,i=1, 2, …,α.
2)将该位置的BLE RSSI 数据表示为(b1,b2, …,bβ),其中β为BLE 信标的个数,bj表示第j个BLE 信标在该位置处的信号强度,j=1, 2, …,β.
3)利用同一位置下采集到的可见光光照强度数据与BLE RSSI 数据融合构建混合指纹F,F表示为:
我们将可见光强度与BLE RSSI 融合成2 通道混合指纹数据,这样能够通过跨通道交互策略更加有效地获取通道之间的相互依赖关系,捕获沿通道方向信息量最大的特征表示,获取可见光指纹与BLE指纹中的位置关联性,充分发挥混合指纹的优势,使提取出来的特征具有更强的表达能力.
为了评估混合指纹的稳定性,我们在实验场地采集了20 个位置的指纹数据,即BLE RSSI 数据和可见光强度数据,每个位置的样本数为10. 同时根据ECACon-HF 方法构建BLE RSSI 和可见光强度的混合指纹数据. 我们首先对每个样本中的数据取平均值,再计算每个位置10 个样本平均值的方差,用于表示各位置指纹的稳定性. 从图2 可以看出,由于可见光强度具有很高的稳定性,每个位置可见光强度指纹的方差都是最小的. 每个位置混合指纹的方差都要小于BLE 指纹的方差,代表混合指纹比BLE 指纹稳定,这是因为可见光强度稳定性较高,将其与BLE RSSI 混合能够使混合指纹的稳定性整体高于BLE 指纹.

Fig. 2 Stability comparison chart of BLE fingerprint and mixed fingerprint图2 BLE 指纹与混合指纹稳定性对比图
为了评估混合指纹的位置特征差异性,定义矩阵D,D中的元素为 ξ个不同位置之间指纹的欧氏距离,D的表示如式(2)所示.
其中dij表示位置i与位置j之间指纹的欧氏距离.
我们同样使用这20 个位置的指纹数据,通过式(2)分别针对BLE RSSI 指纹、可见光强度指纹与BLE RSSI 和可见光强度的混合指纹构建矩阵D的热力图,结果如图3 所示. 从图3(a)可以看出,部分位置之间具有较高的特征差异性,说明BLE RSSI 指纹具有一定的特征区分度;而图3(b)中不同位置之间的特征差异性较小,说明可见光强度指纹特征区分度不够明显. 从图3(c)中可以看出,BLE RSSI 和可见光强度的混合指纹在大部分位置之间具有较大的差异性,只有很少部分的位置之间差异性较小,混合指纹的特征区分度要大于BLE RSSI 指纹和可见光强度指纹. 因此,使用混合指纹能够增加不同位置之间的特征差异性.
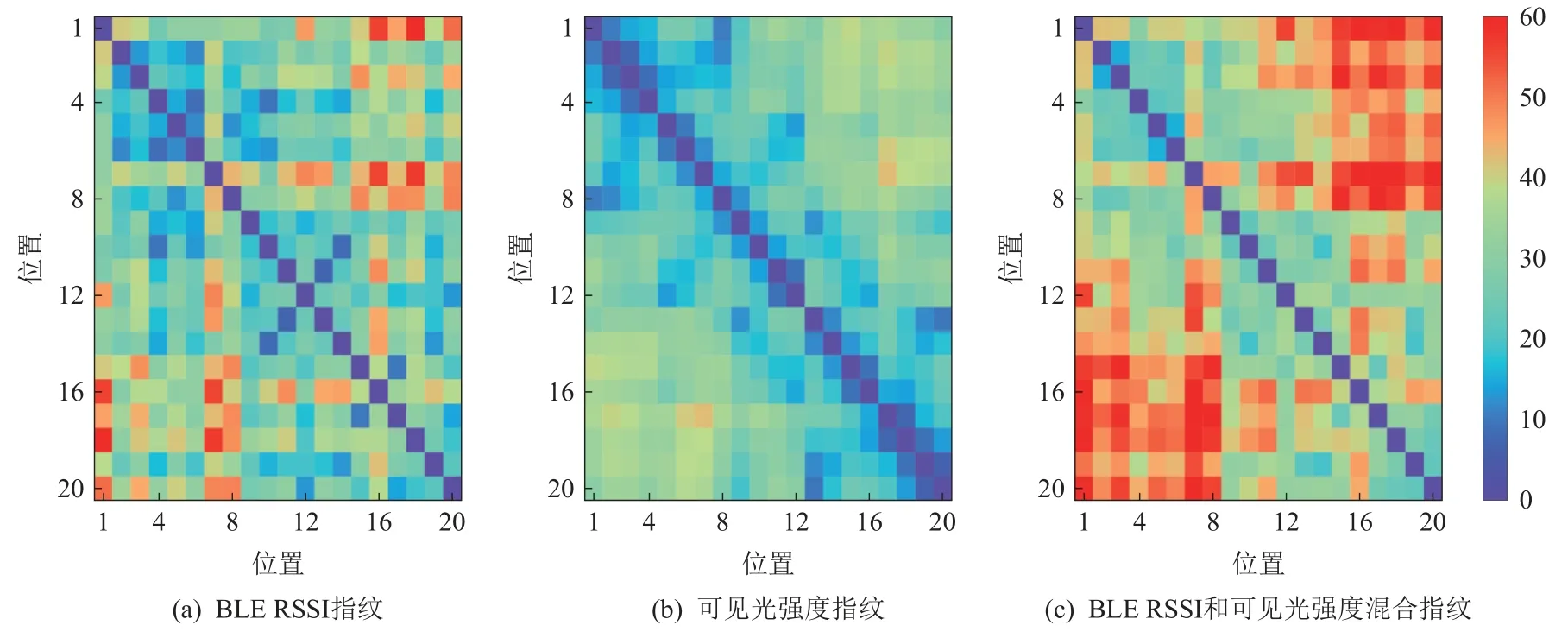
Fig. 3 Heat map of matrix D under three fingerprints图3 3 种指纹下的矩阵D 的热力图
2.2 基于ECA-CNN 的混合指纹定位模型
2.2.1 ECA 模块
ECA 作为通道注意力的一种,是对挤压与激发网络(squeeze-and-excitation networks, SENet)的改进. ECA使用一种不降维的局部跨通道交互策略,该策略通过快速1 维卷积有效实现,在保证性能的同时显著降低模型的复杂度[30].
ECA 的结构如图4 所示. 首先,使用全局平均池化(global average pooling, GAP)获得聚合特征. 然后使用卷积核大小为K的1 维卷积实现局部跨通道交互,这里K的大小决定跨通道交互的覆盖范围,K的大小是由通道数C自适应确定的,K与C之间存在一个映射关系,如式(3)和式(4)所示.

Fig. 4 Structure diagram of ECA图4 ECA 结构图
其中γ与b为自定义参数,分别设置为γ= 2 和b= 1,|·|odd表示距离最近的奇数. 最后通过Sigmoid 函数得到通道权重,将生成的通道权重与输入特征逐元素相 乘得到带有注意力的特征.
2.2.2 ECA-CNN 定位模型
可见光强度和BLE RSSI 的混合指纹融合了可见光与BLE 的优势,比如混合指纹的稳定性更好、特征区分度更高,同时也会带有二者的一些劣势,比如BLE 信号易受干扰而不稳定,会使混合指纹中带有环境干扰等无效特征,传统CNN 在指纹匹配阶段无法对这些无效特征进行抑制,同时也不能对混合指纹的位置特征相关性进行表示. 针对这一问题,本文将ECA 模块引入到CNN 中,构建ECA-CNN 定位模型,如图5 所示.
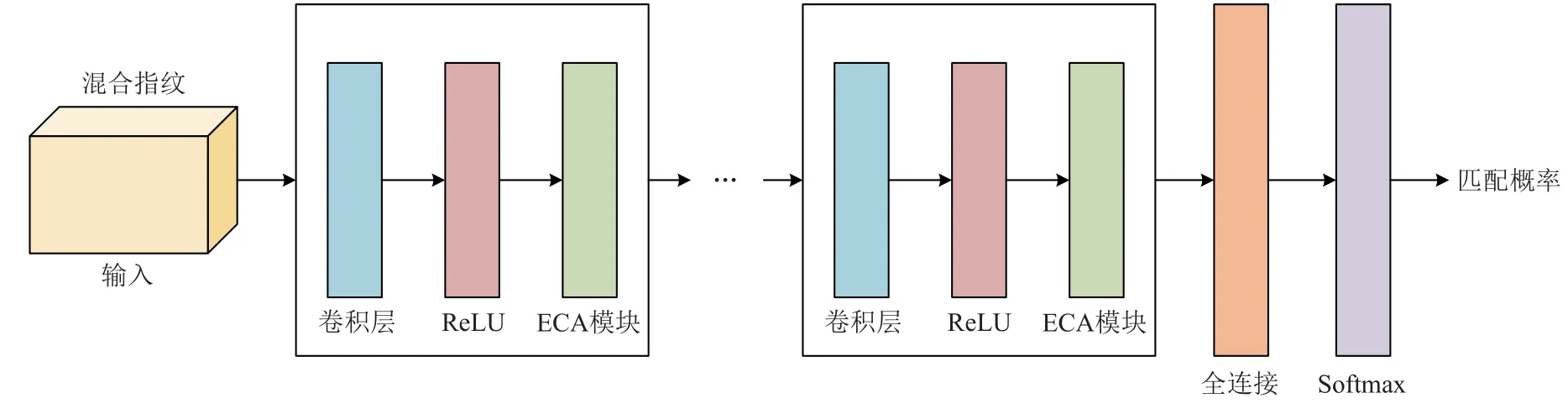
Fig. 5 ECA-CNN model structure图5 ECA-CNN 模型结构
我们将2 通道可见光强度和BLE RSSI 的混合指纹作为ECA-CNN 模型的输入,该模型包含4 层卷积层,卷积核的大小为5×5,每个卷积层使用修正线性单元(rectified linear unit, ReLU)作为激活函数,在每个卷积层后面添加ECA 模块,为每一层卷积层提取的特征添加通道注意力,2 通道混合指纹经过4 层卷积之后通道数分别变为16,32,64,128. 使用一层全连接层作为模型的输出层,并将全连接层的输出结果使用Softmax 函数处理,得到目标点与各参考点的匹配概率. Softmax 函数输出第i个参考点与目标点之间的匹配概率Pi,如式(5)所示.
其中R为参考点个数,zi为全连接层中第i个参考点处的输出. 对于ECA-CNN 模型的训练,使用Adam 优化器以及交叉熵损失函数,选出与目标点最匹配的k个参考点r1,r2,…,rk,这些参考点与目标点之间的匹配概率分别为P1,P2,…,Pk,分别计算这k个参考点的权值,第μ个参考点的权值Wμ的计算如式(6)所示.
根据上述k个参考点,计算目标点的位置坐标,如式(7)所示.
ECA 模块能够增强指纹特征的表达能力,自适应地提取混合指纹中的重要信息,捕获沿通道方向信息量最大的特征. 基于此,我们将可见光强度与BLE RSSI 分通道融合成2 通道混合指纹,因此能够更有效地提取可见光强度指纹与BLE RSSI 指纹中的位置关联性,充分发挥混合指纹的优势,提高指纹特征匹配的正确率,进而提高定位精度.
2.3 ECACon-HF 方法总体流程
ECACon-HF 的工作流程如图6 所示,该流程包括离线阶段和在线阶段.

Fig. 6 Overall work flow chart of ECACon-HF图6 ECACon-HF 的总体工作流程图
1)在离线阶段,从待定位场地采集参考点处可见光强度和BLE RSSI 数据构建混合指纹,并使用参考点坐标对混合指纹进行标记,将ECA 模块加入CNN 中构建ECA-CNN 定位模型,再用标记好的混合指纹训练ECA-CNN 模型.
2)在在线阶段,使用离线阶段训练的ECA-CNN模型对目标点与参考点进行匹配. 首先采集目标点的可见光强度和BLE RSSI 数据,可见光强度与BLE RSSI 数据融合构建目标点的混合指纹,将混合指纹输入离线阶段训练的ECA-CNN 模型得到与目标点最匹配的一组参考点,对这组参考点的坐标进行加权平均得到目标点坐标.
算法1 给出了ECACon-HF 的伪代码.
算法1.ECACon-HF.
1)离线阶段
输入:根据2.1 节构建的参考点可见光强度与BLE RSSI 混合指纹F.
① 通过卷积操作提取指纹特征;
② 通过ECA 模块为提取的指纹特征计算通道权重,对特征进行通道加权得到带有注意力的特征;
③ 获得训练好的ECA-CNN 定位模型.
2)在线阶段
输入:根据本文2.1 节构建的目标点可见光强度与BLE RSSI 混合指纹F;
输出:目标点坐标(x,y) .
① ECA-CNN 定位模型得到目标点与各参考点的匹配程度,z=cnn_model(F);
② Softmax 函数将匹配程度转化成匹配概率,P=Softmax(z);
③ 选择与目标点之间匹配概率最大的前k个参考点r1,r2,…,rk;
④ 根据式(6)计算这k个参考点的权值W1,W2,…,Wk;
⑤ 根据式(7)和式(8)计算目标点坐标(x,y) 和该目标点处的定位误差err.
3 实 验
3.1 实验环境
为了评估本文所提出的定位方法的性能,如图7所示,在某研讨室进行了数据采集和定位实验. 选择房间内4.8 m×4 m 大小的区域作为定位区域,在房顶布置6个LED 灯和4 个BLE 节点,房间高2.7 m. 如图8 所示,在定位区域选取20 个参考点,参考点之间间隔1 m,选取15 个测试点,测试点与参考点不重合.
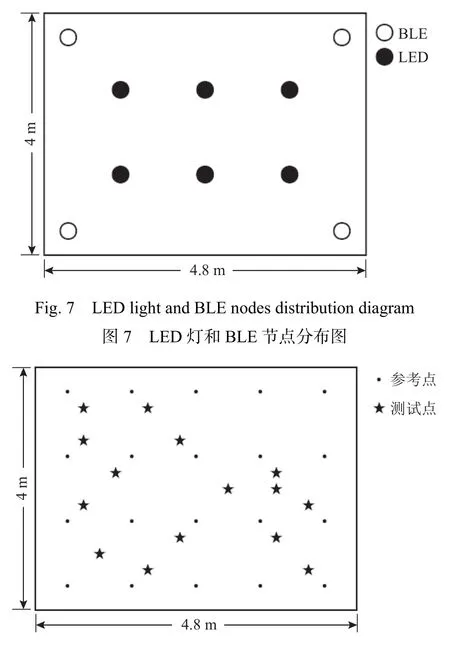
Fig. 8 Distribution diagram of reference points and test points图8 参考点和测试点分布图
使用标智GM1040B 照度计测量可见光强度,使用iPhone 11 手机测量BLE RSSI.对于每一个参考点,采集100 个样本数据;对于每一个测试点,采集40 个样本数据.
3.2 实验结果与分析
3.2.1 混合指纹与单一指纹定位结果对比
基于3.1 节所述的实验环境中获取的参考点与测试点的测量数据,分别构建单一可见光强度指纹库、单一BLE RSSI 指纹库和可见光强度与BLE RSSI 的混合指纹库. 可见光强度数据是在无环境光干扰的情况下采集的,考虑到实际情况中可见光强度容易受日照、时间等因素影响,本文通过给可见光强度增加高斯噪声,构建了有干扰的单一可见光强度指纹库以及有干扰的可见光强度与BLE RSSI 的混合指纹库,进行实验.
在可见光强度无干扰的情况下,采用ECACon-HF 方法分别基于单一可见光强度指纹、单一BLE RSSI 指纹、可见光强度与BLE RSSI 的混合指纹进行定位,3 组实验的累计误差分布对比如图9 所示. 由实验结果可知,使用单一BLE RSSI 指纹时,仅有35%的定位误差小于等于1 m;采用单一可见光强度指纹和混合指纹时均能100%达到定位误差小于等于1 m;而采用单一可见光强度指纹时,有81%定位误差小于等于0.3 m,使用混合指纹时,85%的定位误差小于等于0.3 m. 混合指纹定位精度整体高于单一可见光强度指纹.
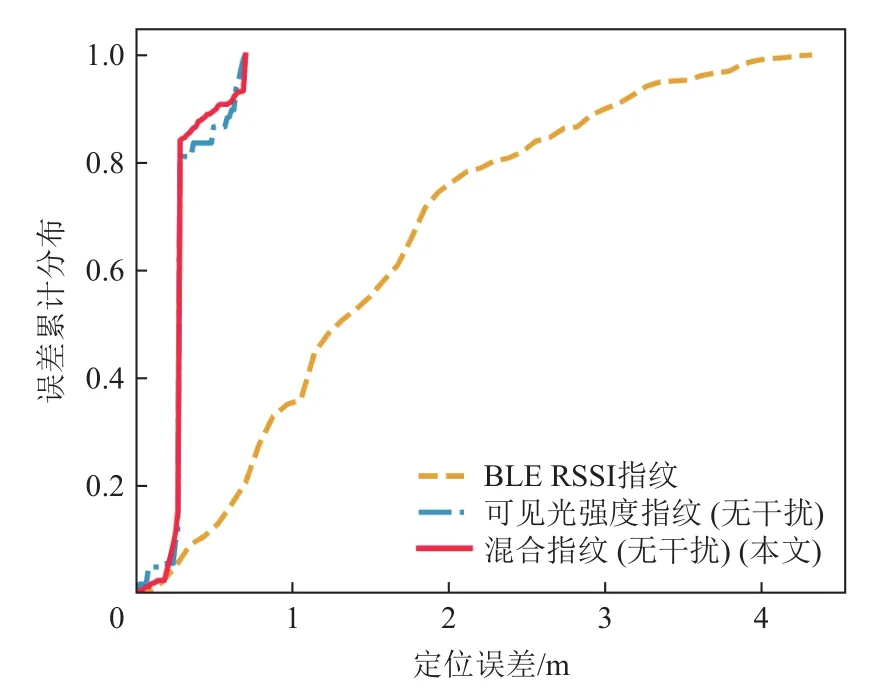
Fig. 9 Comparison of localization results of mixed fingerprint and single fingerprint without interference图9 无干扰情况下混合指纹与单一指纹定位结果对比
表1 为在可见光强度无干扰的情况下使用3 种指纹时的平均定位误差和最大定位的误差的对比.从实验结果可以看出,使用混合指纹时平均定位误差为0.316 m,相比于单一使用可见光强度指纹时的0.325 m 和单一使用BLE RSSI 指纹时的1.509 m,分别减小了3%和 79%. 使用混合指纹时最大定位误差为0.705 m,其值与使用可见光指纹时的基本一致,相比于单一使用BLE RSSI 指纹时的4.321 m 减小了83%.
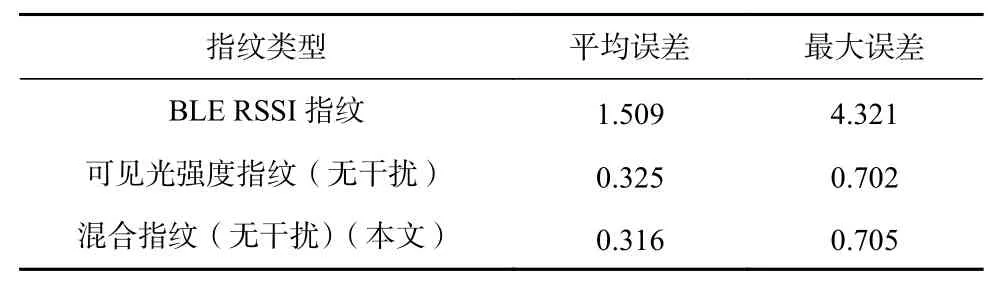
Table 1 Comparison of Different Fingerprint Localization Errors Without Interference表1 无干扰情况下不同指纹定位误差对比m
在可见光强度有干扰的情况下,我们进行了混合指纹与单一指纹的对比实验,实验结果如图10 所示. 从图10 可知,混合指纹相比于单一指纹的定位结果差别较大,优势更加明显,使用混合指纹时能100%达到定位误差小于等于1 m,而使用单一可见光指纹时仅有89% 的定位误差在1 m 以下;在高精度方面,使用混合指纹67%的定位误差都小于等于0.3 m,而使用单一可见光指纹仅有49%的定位误差小于等于0.3 m.
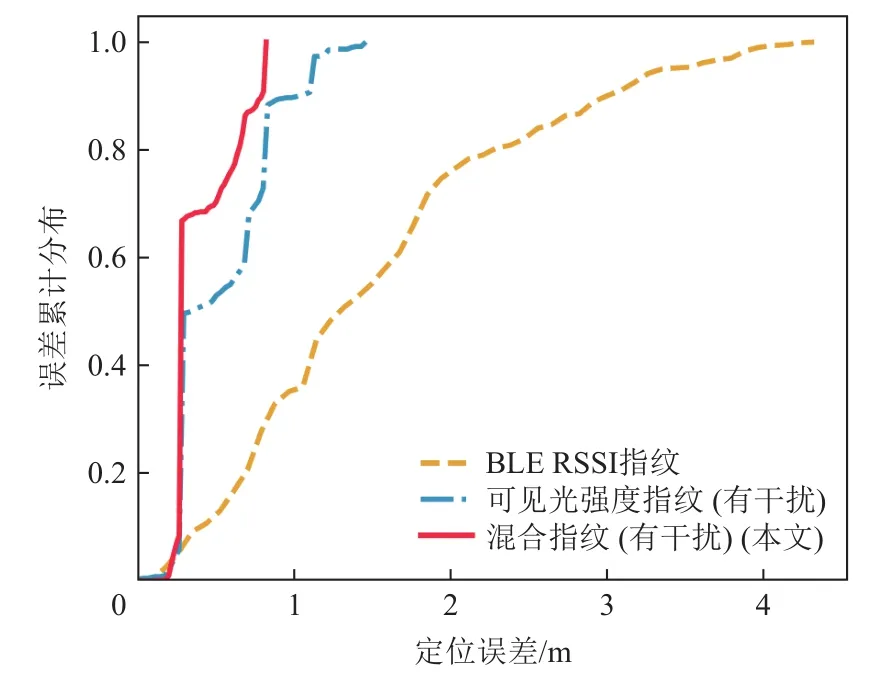
Fig. 10 Comparison of localization results between mixed fingerprint and single fingerprint with interference图10 有干扰情况下混合指纹与单一指纹定位结果对比
有干扰条件下的不同指纹定位实验平均定位误差和最大定位误差如表2 所示. 从实验结果可以看出,使用混合指纹时平均定位误差为0.406 m,相比于单一使用可见光强度指纹时的0.547 m 和使用BLE RSSI 指纹时的1.509 m,分别减小了26% 和73%. 使用混合指纹时最大定位误差为0.824 m,相比于使用可见光强度指纹时的1.461 m 和使用BLE RSSI 指纹时的4.321 m 分别减小了44%和81%.
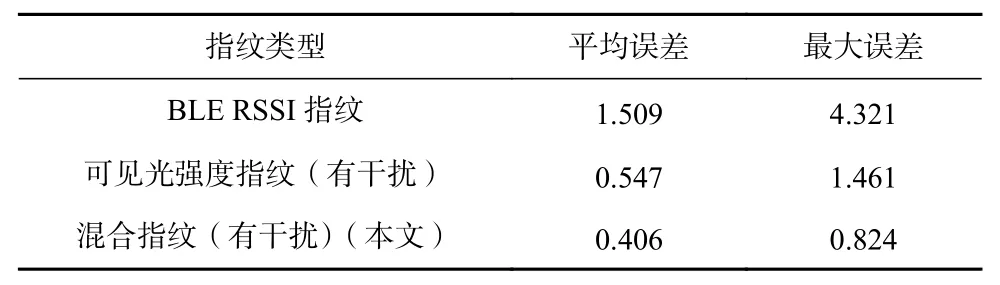
Table 2 Comparison of Different Fingerprint Localization Errors with Interference表2 有干扰下不同指纹定位误差对比m
综上所述,在可见光强度无干扰的情况下,可见光强度较为稳定,从而导致定位模型在提取混合指纹特征时BLE RSSI 特征所产生的影响很小,最终混合指纹的定位结果具有优势,但和单一可见光强度指纹的定位结果接近. 在可见光强度有干扰的情况下,基于指纹作用的互补特性,混合指纹的定位优势更为明显,结果均优于单一指纹的定位效果.
为了验证使用混合指纹是否会增加计算复杂度,导致定位延迟增大,我们给出了使用不同类型的指纹在无干扰情况下进行定位的执行时间,如表3 所示. 可以看出使用混合指纹时的执行时间和使用单一指纹时的执行时间相近,由此可以说明使用混合指纹不会导致计算复杂度大幅度增加.
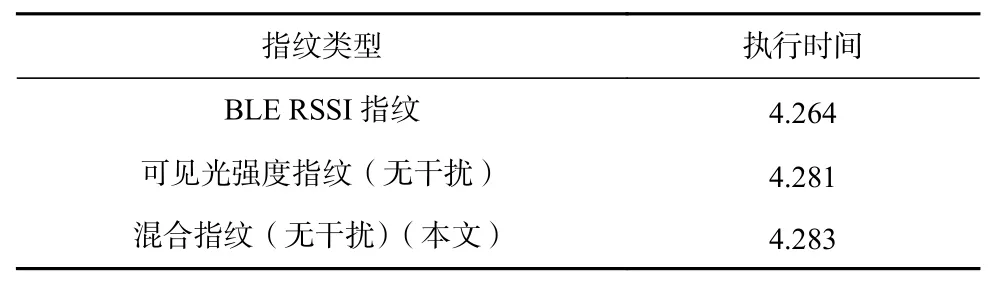
Table 3 Execution Time Under Different Fingerprints表3 不同指纹下的执行时间s
3.2.2 模型参数对定位结果的影响
本节分别为ECA-CNN 模型设置不同的参数进行试验. 本节及以后的实验中均采用无干扰的指纹数据. 首先比较不同的迭代次数对实验结果的影响,如表4 所示,我们分别对比了迭代次数为100,200,300,400 时的结果. 从实验结果中可以看到,迭代200 次时定位误差最小,并且在迭代200 次时模型的损失就可以降到最小,因此本文对ECA-CNN 模型的训练选用200 次迭代.
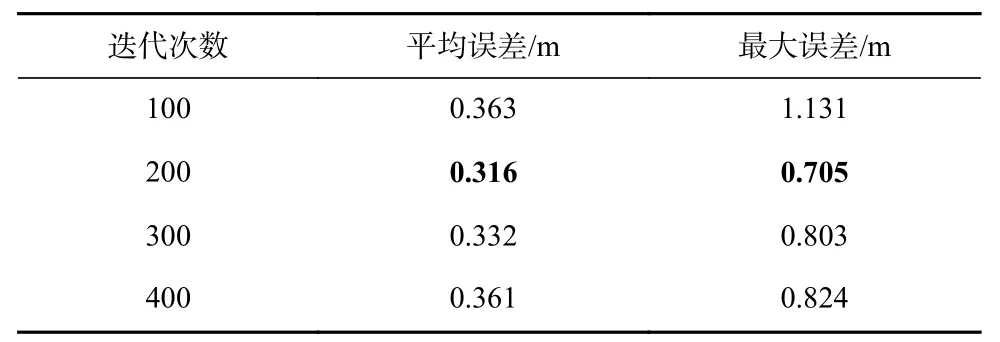
Table 4 Influence of Different Iterations表4 不同迭代次数的影响
此外,我们还做了对比实验,比较了不同的卷积核大小对实验结果的影响,如表5 所示,我们分别将卷积核大小设置为2×2,2×3,2×5,2×6,3×3,5×5. 从实验结果中可以看出,卷积核大小为5×5 时定位误差最小,并且5×5 大小的卷积核能够使指纹数据的大小保持不变,因此本文将ECA-CNN 模型的卷积核大小设置为5×5.

Table 5 Influence of Different Convolution Kernel Sizes表5 不同卷积核大小的影响
最后,我们还比较了卷积层的数量对实验结果的影响,如表6 所示,我们令卷积层的数量分别为2,3,4,5,6. 从实验结果可以看出,4 层卷积层的定位误差最小,因此本文采用4 层卷积层.

Table 6 Influence of Different Number of Convolution Layers表6 不同卷积层数量的影响
3.2.3 网络模型对比
本节使用ECACon-HF 分别与不引入注意力的CNN 定位方法和引入自注意力的CNN 定位方法进行比较.
首先,为了证明ECA 模块的有效性,分别使用ECACon-HF 与不引入注意力的CNN 定位方法在混合指纹上进行了实验,实验结果如表7 所示. ECACon-HF 的平均定位误差和最大定位误差都要小于不引入注意力的CNN 定位方法. 说明在CNN 中引入ECA 模块能够自适应地提取混合指纹中的重要信息,增强特征表达能力,抑制指纹中的环境干扰等无效特征. 并且能够通过跨通道交互策略捕获通道之间的相互依赖关系,更有效地提取可见光强度指纹与BLE RSSI 指纹中的位置关联性,充分发挥混合指纹的优势,提高指纹特征匹配的正确率,进而提高定位精度.
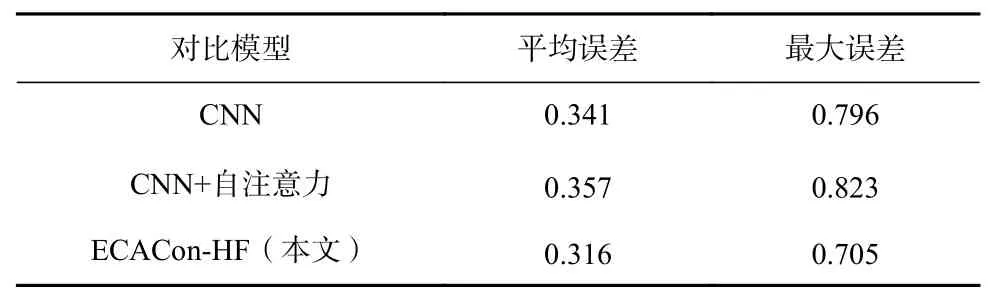
Table 7 Comparison of ECACon-HF, CNN and CNN with Introducing Self Attention表7 ECACon-HF 与CNN、引入自注意力的CNN 对比 m
其次,将ECACon-HF 与引入自注意力的CNN 定位方法进行对比,自注意力机制是注意力机制的改进,其减少了对外部信息的依赖,更擅长捕捉数据或特征的内部相关性. 实验结果如表7 所示,由于将2种指纹混合后指纹内部的相关性不能很好地表示指纹的位置特征,而本文在CNN 中引入ECA 模块,并将可见光强度指纹与BLE RSSI 指纹进行分通道混合,因此能有效提取可见光与BLE 之间的位置关联性,充分发挥混合指纹的优势,因此ECACon-HF 具有更高的定位精度.
3.2.4 不同方法定位精度对比
本节将ECACon-HF 与其他定位方法进行对比,为了避免由于采用不同指纹特征对精度产生的影响,所有实验结果均基于本文构建的可见光强度和BLE RSSI 混合指纹库进行测试统计.
首先将ECACon-HF 与传统KNN 方法、WKNN方法的定位结果进行对比,3 种方法的误差累计分布如图11 所示. 实验结果表明,KNN 与WKNN 55%的误差小于等于1 m,而ECACon-HF 测试误差均在1 m以内. 在高精度方面,KNN 与WKNN 都只有16%的误差小于等于0.3 m,与ECACon-HF 85%小于等于0.3 m 的定位误差对比差距很大.ECACon-HF 相比于KNN 和WKNN 定位精度都有很大的提升.
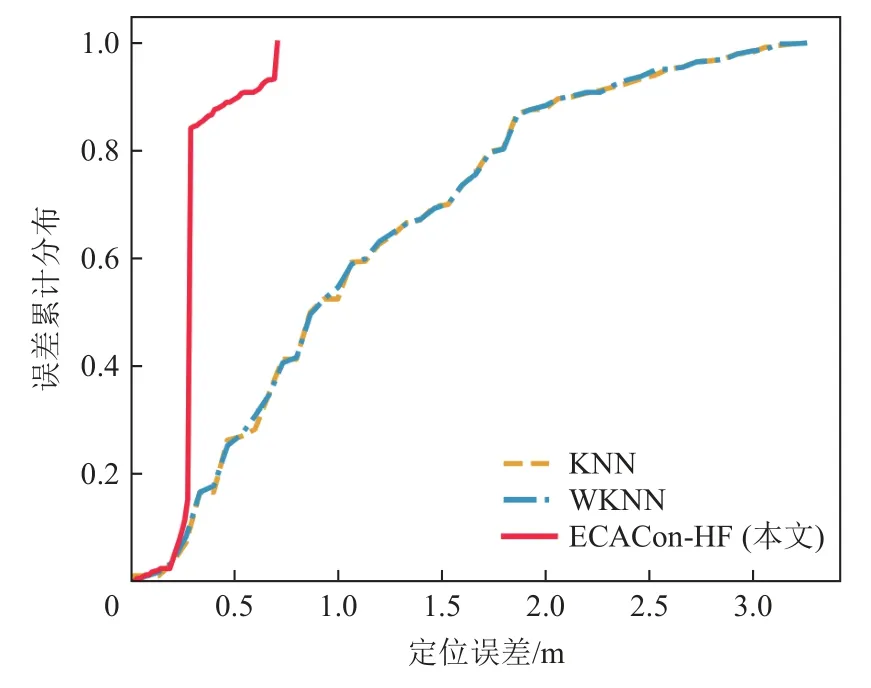
Fig. 11 Comparison of error cumulative distribution among ECACon-HF, KNN and WKNN图11 ECACon-HF 与KNN 和WKNN 的误差累计分布对比
其次本文将ECACon-HF 与其他基于CNN 的室内定位方法进行对比. 基于本文构建的无干扰混合指纹库,分别采用ECACon-HF、文献[18]中的方法、ConFi 方法[19]以及CiFi 方法[20]对测试点进行定位误差统计,这4 种方法的累计误差分布如图12 所示. 实验结果表明,文献[18]、ConFi 以及ConFi 分别仅有83%,84%,87%的误差小于等于1 m,相比于ECACon-HF,没有达到100%的小于等于1 m 的定位精度. 同时,ECACon-HF 能够达到85%的定位误差小于等于0.3 m,而文献[18]、ConFi 以及ConFi 分别仅有49%,59%,53%的定位误差小于等于0.3 m. ECACon-HF 的定位精度相比其他3 种CNN 定位方法,在定位精度方面提升显著.

Fig. 12 Comparison of error cumulative distribution among ECACon-HF and other CNN based methods图12 ECACon-HF 与其他基于CNN 方法的误差累计分布对比
表8 为各定位方法在3 种指纹上的平均误差和最大误差对比. ECACon-HF 在混合指纹上的平均定位误差为0. 316 m, KNN 和WKNN 在混合指纹上的平均定位误差分别为1. 090 m 和1. 089 m,ECACon-HF 的平均定位误差相比于它们减小了71%. 不引入ECA 模块的CNN 定位方法平均定位误差为0. 341 m,ECACon-HF 相比于它减少了7%. 文献[18]、ConFi 和CiFi 均基于本文所构建的混合指纹库,平均定位误差分别为0. 576 m,0. 569 m,0. 633 m,ECACon-HF 的平均定位误差相比于这3 种方法分别减少了46%,45%,51%. 在最大误差方面,ECACon-HF 在混合指纹上的定位误差要明显小于其他方法. 由此可见,在混合指纹库上,ECACon-HF 具有相对的鲁棒性.
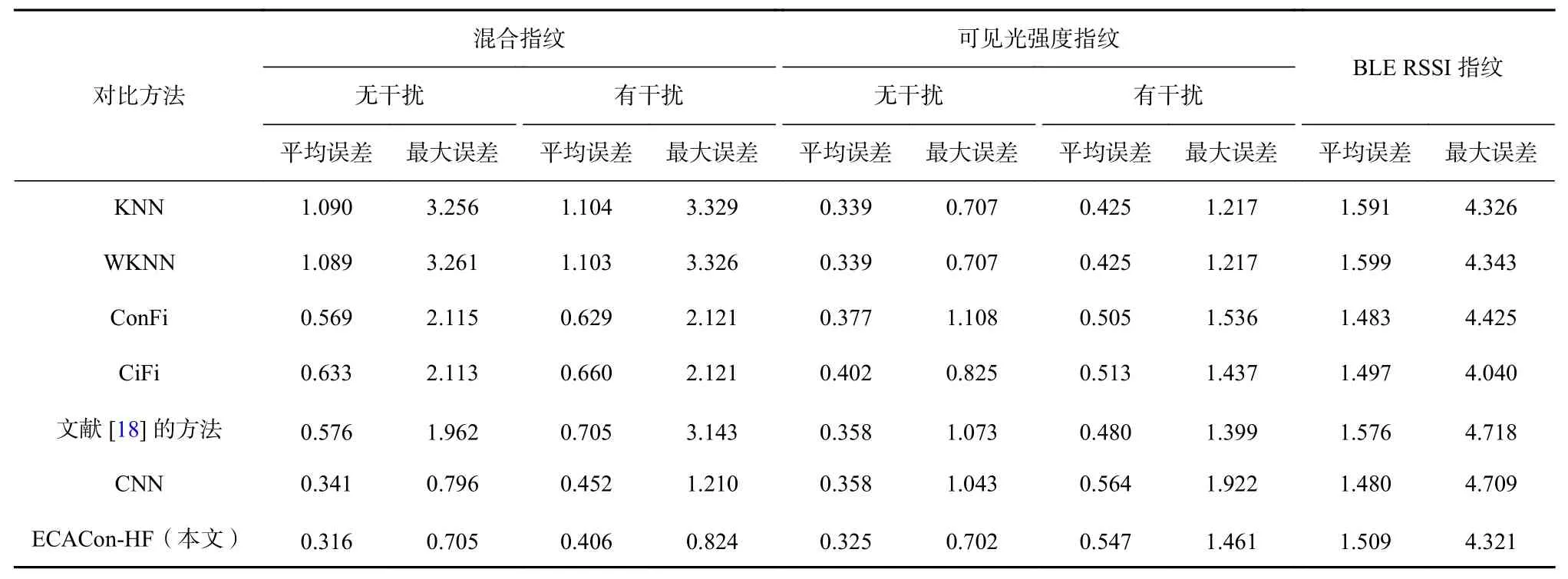
Table 8 Comparison of Average Error and Maximum Error of Each Method on Three Fingerprints表8 各方法在3 种指纹上的平均误差与最大误差对比m
进一步分析表明,虽然ECACon-HF 在无干扰情况下,单一可见光指纹和混合指纹的最大定位误差接近;但在有干扰的情况下,ECACon-HF 对混合指纹处理后的最大误差仍控制在1 m 以内,相比有干扰的单一可见光指纹,最大定位误差减小了44%. 同时,当可见光强度在有干扰的情况下,上述各方法的最大定位误差相比无干扰情况均有所增加. 其中定位精度较高的方法中,ECACon-HF 的最大定位误差相比无干扰指纹增加了14.4%,而CNN 方法增加了34.2%,文献[18]增加了37.6%;而在混合指纹上定位精度较低的KNN,WKNN,ConFi,CiFi 等方法,由于对混合指纹特征不敏感,最大定位误差没有明显差异. 由此可以看出,指纹在受到干扰的影响下,对具有高定位精度的模型会产生较大影响,但ECACon-HF 相比于其他方法对混合指纹的抗干扰处理具有明显优势.
综上所述,ECACon-HF 针对混合指纹库的定位精度比单一指纹库更具优势. 同时,基于混合指纹库,ECACon-HF 不论是相比于传统KNN 与WKNN,还是其他基于CNN 的室内定位方法,定位精度均得到了提升.
4 结 论
本文提出一种基于ECA-CNN 的混合指纹室内定位方法(ECACon-HF). 首先,利用可见光强度和BLE RSSI 混合指纹有效降低了BLE 指纹不稳定的影响,并增强了不同位置间的特征差异性. 其次,将ECA 模块加入CNN 中构建ECA-CNN 定位模型,可以自适应地提取混合指纹中的重要信息,增强特征表达能力,抑制指纹中的环境干扰等无效特征,并且能够更有效地提取可见光强度指纹与BLE RSSI 指纹中的位置关联性,充分发挥混合指纹的优势. 通过实验验证了所提方法的有效性,ECACon-HF 在本文构建的混合指纹库上可以达到0.316 m 的定位精度,高于单一指纹上的定位精度,并且ECACon-HF 相比其他室内定位方法的定位精度具有明显优势. 从本文实验结果中可以看出,在无干扰情况下,可见光强度指纹的定位精度较高,但如何避免环境对可见光强度的干扰是个问题,因此未来我们将考虑使用强化学习控制环境中的可见光强度,使光强度稳定,减少自然光与遮挡对光强度的影响进而降低可见光定位的应用场景限制.
作者贡献声明:王正康负责论文撰写、实验和模型方案设计和算法的提出;骆冰清负责模型方案设计和算法的提出,并对论文提出修改意见.
