引领“首驾驶”船舶的注意事项
2024-02-19李涛 刘洪举 张光辉
李涛 刘洪举 张光辉


摘 要:本文从结构设计和操纵特点两个方面,分析首驾驶和尾驾驶两种船型的差异。首先从结构上分析首驾驶船舶的优劣势,并介绍引航中常遇到的首驾驶船舶类型;再者从操纵出发,以转心为参考点,分析两种船型在转向过程中,驾引人员视觉观察上的差别,狭窄水域以及靠离泊时操纵上的难点,并提出解决方案。
关键词:首驾驶;船舶转心;视觉误差
0 引 言
不同类型的船舶在作用以及操纵性能上各有区别。本文主要分析驾驶台在船上的不同位置对于船舶操纵性能和驾引习惯上产生的影响及区别,以及驾引人员应当如何应对。根据驾驶台在船上的不同位置,主要分为“首驾驶”和“尾驾驶”两种类型。目前,我们在引航中,主流船型还是“尾驾驶”,“首驾驶”船舶较少遇到,早期主要是一些小型的泊载船,内河船前驾驶比较多,在宁波港甬江内有一些超100 m的“首驾驶”集装箱船。随着船舶大型化,以及集装箱船对于箱位量和装载效益追求,“首驾驶”越来越多地被运用到大型船舶上。世界上最大的集装箱船“MSC IRINA”号就是“首驾驶”船型。目前,专门针对首驾驶船舶的研究资料较少,本文主要针对首驾驶船舶在结构上以及操纵性能上的特性进行分析。
1 “首驾驶”船舶在结构上的特性
1.1 “首驾驶”船舶结构上的优势
1.1.1 内河的小型船舶很多采用“首驾驶”是基于视野开阔,有利于驾驶员观察前方航道情况。内河复杂多变,需要驾驶员时刻注意前方状况,采用“首驾驶”船型可以提供更好的视野。本文的研究主要是针对需要申请引航的中大型船舶。
1.1.2 中大型船舶采用“首驾驶”船型,在结构上主要是考虑到3个优点:
(1)主要还是为了船舶配载的考虑,可以装载更多的货物,根据船舶的配载调整驾驶台的位置。
(2)更有利于观察前方的动态,盲区相对较小,集装箱往往会装得比较高,驾驶台设计在船舶前部,大部分集装箱船装载驾驶台之后,对瞭望的影响小,提高操纵性和视野,使船舶更容易被操纵和控制。首驾驶可以使驾引人员更好地了解船舶的航行情况,观察前方的环境和障碍,并更好地控制船舶的转向和速度。
随着船舶大型化的发展,最新的集装箱船长度达到了400 m,因为船舶在绝大多数时候是向前航行的,我们需要观察和避让的障碍物都在船头方向,如果将驾驶台设计在船艉,要观察船头的物标或者障碍物,距离会非常的远,不利于航行安全。
(3)生活区与机舱分离,使得船员可以有更舒适健康的生活环境,远离机舱的噪声和油烟的影响。
1.2 “首驾驶”船舶结构上的劣势
1.2.1 生活区离机舱距离较远
驾驶台与机舱控制室、舵机间等关键部位和系统之间距离较远,不利于在紧急情况下的应急操作,如:舵机遥控系统出故障,舵机失控,需要在舵机间进行手操舵时,需要更长时间才能到达。而往往这几分钟或者几十秒就能导致一场险情甚至时事故的发生。
1.2.2 驾驶台受浪涌影响大
驾驶台处于船舶前部,更容易受到风浪的影响。在恶劣的海况下,高风浪可能会对驾驶台产生较大的冲击力,驾驶员视线也容易受阻。此外,浪涌会增加“首驾驶”船舶的纵摇幅度,这会对驾驶员产生生理性不适应,也会给设备和设施带来损坏风险。
1.2.3 向后方的视野受限
由于驾驶台在船首,向后方的视野容易被集装箱堆挡住,航行时不易发现左右两侧和后方的来船,增加了航行的隐患。
2 “首驾驶”船舶的操纵特点
2.1 “首驾驶”与“尾驾驶”的视觉差别
对于引航员而言,“首驾驶”“尾驾驶”船舶在操纵性能上是有很大区别的,特别是在大转向时和靠离泊作业过程中。由于驾引人员所处的位置不同,驾引人员在观测船舶运动状态时视觉上的差别很大,在避让和靠离泊操作中参考点不同,施舵时机以及靠离泊过程中调平和掉头的时机是完全不同的。
为了更加清楚地解释此视觉差,在这里我们引入“船舶转心”这一概念。《船舶操纵》对船舶转心的定义:“操纵运动中的船舶可视为一方面船舶以一定的速度前进,同时绕通过某一点的竖轴而旋转运动的叠加,这一点就是转心(pivoting point),通常以英文字母 P 代表之。”[1]从几何学上讲,转心 P 的位置是旋回中某瞬间的旋回中心至船舶首尾线的垂足点。当船舶前进时,船的转心的位置上会随着船舶的运动状态而发生变化,一般我们认为前进中的船舶转心在距离船首三分之一到四分之一船长处。[2]
当船舶以匀速前进时,我们假设船舶的转心在船艏后三分之一到四分之一船长之间,那我们来作图分析在船舶转向过程中,驾引人员在前驾驶与后驾驶所观察到的船舶转动的视觉差异。[3]
“首驾驶”船舶在船舶前进中转向时观察的船头船艉的转动情况,如图1 所示。假设船舶转心在P点,驾引人员位置在O点,船头船艉分别为A,B两点,在船舶转动一定的角度看之后,驾引人员,船头船艉分别来到O’,A’,B’点,3个点的所发生的位移分别是OO’,AA’,BB’;由于驾引人员位于转心之前,位移的方向与船头位移的方向相同,可得出驾引人员观测到的船头位移为:AA’-OO’;同理船艉的位移与驾引人员的方向是相反的,產生的视觉效应是叠加的,因此驾引人员观测的船艉位移为:BB’+OO’。
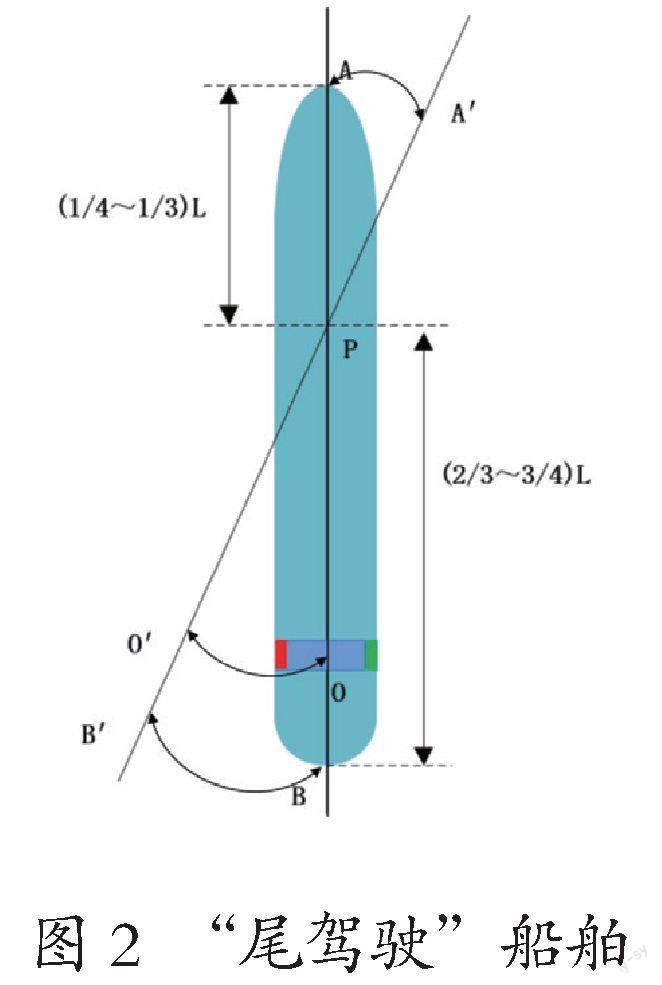
“尾驾驶”船舶在船舶前进中转向时观察的船头船艉转动情况,如图2 所示。假设船舶转心在P点,驾引人员位置在O点,船头船艉分别为A,B两点,在船舶转动一定的角度看之后,驾引人员,船头船艉分别来到O’,A’,B’点,3个点的所发生的位移分别是OO’,AA’,BB’;驾引人员位于转心之后,位移的方向与船头位移的方向相反,可得出驾引人员观测到的船头位移为:AA’+OO’;船艉的位移与驾引人员的方向是相同,驾引人员观测的船艉位移为:BB’-OO’。
由此,我们可以得出结论:在船舶转向时,“首驾驶”船舶驾引人员视觉观测船头的转动速率低于船艉的转动速率,而“尾驾驶”船舶则相反。我们通过简单的计算可以得出这个定量值。以366的“首驾驶”船型“CMA CGM BRAZIL”号为例:根据图3船舶“引航卡”我们可以看出本船驾驶台到船头的距离为111 m,到船艉的距离为255 m,假设转心在船头后三分之一船长处,及船头后122 m处,假设船舶转动20°,驾驶台观测:
船头的转头速率为:V1=(AA’-OO’)/T=(2π×PA×20°/360°-2π×P0×20°/360°)=(2π×122×20°/360°-2π×11×20°/360°)/T=(58.9-5.3)T=53.6/T
船艉的转头速率为:V2=(BB’+OO’)/T=(2π×PB×20°/360°+2π×P0×20°/360°)=(2π×244×20°/360°+2π×11×20°/360°)/T=(117.9+5.3)T=123.2/T
由上述计算我们可以得出“首驾驶”船舶驾引人员在驾驶台位置观测船艉的转动速率是船头的2.3倍;当然不同的船型,不同的运动状态下速率差会有所不同。[4]
2.2 “首驾驶”船舶近距离避让,狭水道航行,靠离泊注意事项及应对措施
2.2.1 注意事项
(1)由上面的结论我们可以得出“首驾驶”船舶在转向时如果只观测船头的转动是很难判断能否避让清爽障碍物,特别是近距离避让他船时,很难通过船头的转动来判断他船的舷角变化,对于局面的分析和判断有很大难度。[5]
(2)在狭水道中转向时,受“甩尾”效应影响,“首驾驶”型船舶转向或避让难度较大,我们也经常会感觉船头清爽了,船艉快速扫向岸边,造成头清尾不清的感觉。除此之外,狭窄水域中严重受视角限制的操舵条件,增加了“首驾驶”船舶的航行风险。
(3)在靠离泊时,“首驾驶”船舶码头边的调平难度会增大且容易出现误判,在引领前驾驶船舶时,大多数引航员在转向时习惯观测船艉,因为这样对于船舶的运动状态会更加敏感,更容易判断。但这样的做法也是很容易引起误判,因为从首驾驶观测到船艉的转动速率是远快于实际的,在靠泊过程中容易误判船艉横移速度过快,担心船艉扫向码头,而令船艉拖船起拖得太早以至于没贴拢就拖停了,或者是导致船头快速向内转动触碰码头,所以一定要结合船舶整体的运动状态来进行下一步操作。
(4)在大风浪靠离泊时,特别是空船在大风浪靠离泊过程中,要考虑到风对船舶的影响,由于驾驶台生活区的位置不同,会导致船舶前后的受风面积不同,风压也会有区别,在靠离泊过程中计算如何配备拖船马力时要将此考虑在内。
2.2.2 应对措施
(1)驾引人员要时刻保持清醒,要明白船舶转动的位移和速度是一样的,只是由于观测点的不同而产生的视距差异,我们在避让以及靠离泊过程中可以尝试以三维的模型在脑海中呈现船舶的运动状态。
(2)借助航海仪器,电子海图和雷达的辅助,了解船舶的运动状态以及船位,对于转向和避让时机有更清晰的把握。
(3)对于不熟悉的船型,引航员在上船之后不要着急加速,先适应一段时间,在航行和避让中多结合船头船艉的转动速率来判断自己的运动趋势。
(4)在狭水道中转向和近距离避让时要有一定的提前量,留有足够的余地,转向时采取小舵角度频繁操作的方式,而不是一次大幅度转舵,以获得更好的控制效果。有必要时,配合车的运用。
(5)在靠离泊时充分考慮甩尾效应,结合风流对船舶的影响谨慎操作。
3 结 语
通过对“首驾驶”船舶的结构及操纵特点的分析,我们可以得出一些结论:“首驾驶”船舶在船舶结构上具有一定的优势,但也存在一些挑战和风险。在实际操作中,引航员需要充分了解“首驾驶”船舶的特点,明确两种船型的视觉差异,理解转向时的视觉误差,并采取提前避让、综合运用各种仪器等措施来应对操纵困难,遇到此类船舶要格外谨慎,特别是在狭窄水域以及近距离避让时。此外,船舶设计和技术的不断发展也为“首驾驶”船舶的操纵提供了更多的可能性和解决方案。进一步研究和实践将有助于提高“首驾驶”船舶的操纵性能和引航安全水平。
参考文献
[1] 洪碧光.船舶操纵原理与技术[M].大连:大连海事大学出版社,2007.
[2] 张剑 .基于船舶转心概念的船舶操纵研究[J]. 中国水运,2019,3.
[3] 黄迪. 转心在进出港及靠离泊操纵中的意义与应用[J].中国水运,2021,12.
[4] 王向群.“首驾驶”型船舶的操纵特点及注意事项 [J].航海技术,2011,5.
[5] 朱金善,鲍冯军,席永涛,潘国华,沈勇.船舶避碰[ M].大连:大连海事大学出版社,2019.
