引江济淮航道多源数据融合模型及应用分析
2024-02-17燕丽苏东峰谢长波刘玉敏冯建华
燕丽,苏东峰,谢长波,刘玉敏,冯建华
(1.安徽大学,安徽 合肥 230039;2.安徽省引江济淮集团有限公司,安徽 合肥 230041;3.清华大学,北京 100084)
引江济淮航道的感知设备包括AIS 基站、雷达设备、船舶电子卡口设备、船闸过闸设备、航标遥测遥控设备、水位站等多种设备,目前,随着物联网和人工智能等技术的发展,船舶数据融合模型受到越来越多的研究关注。已经有许多研究者从不同的角度对船舶数据融合模型进行了深入的研究和探索,提出了多种不同的融合方法和模型。如何侃等提出GPS 数据与惯性导航数据的船舶导航多源数据融合模型[1],王永兴等提出基于AIS 数据和视频数据的船舶多源数据融合模型[2],赵益智等提出了AIS 与卫星图像数据的船舶数据融合模型[3],严庆新等提出基于AIS 与雷达数据的船舶融合模型[4][5],以上模型均可针对船舶数据进行多源数据融合,提高船舶轨迹的精确度。
针对引江济淮航道管理部门来说,除船舶轨迹精确度外,更重要的是对船舶多维度的分析,如船舶的货物、吨位、载重等,对船舶轨迹的精确程度要求并不高,而对船舶多维度数据的完整性和一致性要求更高。尤其近年来,随着技术发展越来越多的船舶及航道观测设备分别从不同维度进行观测,但是其时空属性、观测重点均有不同,如何对不同来源、不同性质的数据进行融合成为新的课题。
本文针对新的数据特点和应用需求,提出船舶及航道时空数据融合模型,可将移动轨迹感知设备如AIS 及雷达、固定位置感知设备如电子卡口及船闸等不同时空特性的感知数据进行统一融合,从而可对航道及船舶数据进行更多维度及其关联性的分析,实现航道监管的需求。
1 航道及船舶时空感知数据融合模型
1.1 融合数据时空特性
在引江济淮项目中涉及的船舶及航道感知设备中,如表1 所示,不同的感知数据具备不同时空特性,在时间方面,有的数据时间连续性较强,如AIS、雷达,有的数据则是随机或离散的,如航标告警,有的则是定时发送,如水位等;在空间方面,有的数据是固定位置,如电子卡口、船闸,有的数据是可变位置,如AIS、雷达,其空间的覆盖范围也各不相同,有的是全区域覆盖,有的是局部区域覆盖,有的仅覆盖特定航道段。

表1 感知数据时空属性
1.2 数据融合算法及流程
针对不同感知数据的时空特性不同,我们提出了通用的时空数据融合模型,其数据结构包括感知对象库,感知动态数据库,感知数据融合点库,感知融合数据库,其数据架构如图1:
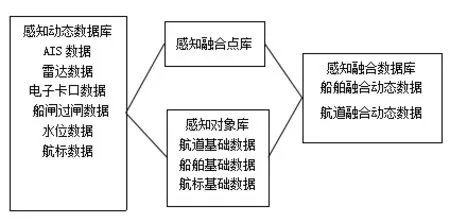
图1 感知融合数据架构
感知融合动态库对应各数据来源的原始动态数据,感知对象库对应各对象的基础数据,感知融合点库对应特定航段不同感知设备的位置及属性,不同来源感知数据需进行融合算法处理,并将融合后的数据写入感知融合数据库。
感知融合点库记录特定位置的多种感知设备及其属性,如对特定航段,同时存在AIS、雷达、电子卡口等设备,感知融合点库记录各设备的属性如表2 所示。
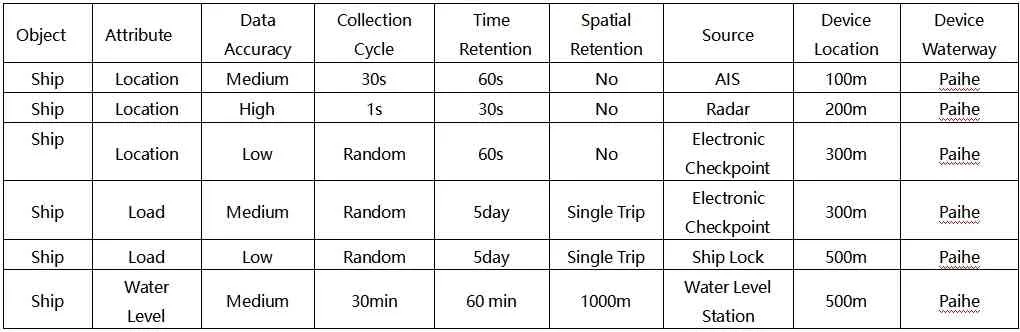
表2 感知融合点库字段
对每一数据来源,需确定其每一字段的如下特征:数据精确度、数据采集周期、时间保持属性、空间保持属性、设备所在位置、设备所在航道等,数据对象可为船舶或航道,时间保持属性为特定时间范围,如AIS 数据的位置字段仅在1 分钟内有效,水位数据可在60 分钟内有效,空间保持可分单程、双程、有效区域范围等,如电子卡口的船舶载重字段仅单程有效,水位数据可在航道1 公里内有效,感知融合点相关属性用于后续数据融合算法。
感知融合算法将针对每一感知对象的不同属性,选择数据质量最高的数据来源为主数据源,在此基础上通过数据融合算法对同一属性不同来源的数据进行概率计算并写入感知融合数据库,感知融合数据库中船舶融合动态数据的结构如图2 所示。
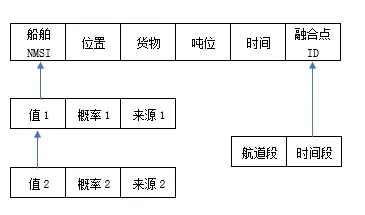
图2 感知融合数据字段
数据融合算法的处理流程如3:
获取感知数据后,首先进行航道匹配,根据航道位置获取相关的数据融合点,如数据融合点的其他数据来源感知对象为船舶,则加载相关的数据并判断是否为同一船舶,其中对象融合算法可根据船舶位置、速度等属性通过欧式距离算法进行判断,欧式距离算法如下:
位置关联度:
其中xi,yi及xj,yj分别对应于不同数据来源的位置坐标,通常通过经纬度转化为墨卡托坐标进行计算。
速度关联度:
其中vi及vj分别对应于t 时刻不同数据来源的船舶速度。
如果已有数据不为船舶数据(航道或水位数据),且该属性数据在时空保持范围内,则同样将该属性数据与船舶轨迹进行融合,沿当前对象历史轨迹进行循环判断并写入融合数据库。
2 数据融合应用分析
通过多源感知数据融合模型算法的处理,感知融合数据库具备不同对象的多维度数据,如针对船舶,除AIS 数据所具备的NMIS 号、船名、位置等,还可融合电子卡口设备所观测的货物信息、吨位信息,水位观测设备所观测的水位信息等,为下一步的业务和管理应用提供数据支撑,主要可应用到如下方面:
2.1 交通流特征多维度分析
如果仅依赖单一来源数据,如AIS 数据,交通流特征分析的维度比较有限,仅限于传统的区域密度、速度、流量等,而船舶与陆地交通不同,不同船舶的可装载吨位、实际装载吨位均不同,且船舶实际装载量是比船舶流量更重要的参考维度,因此,通过对船舶数据的融合,我们可以在传统的交通流特征基础上,对不同区域的船舶运载能力、实际运载量进行统计分析,而不仅仅限于安装电子卡口设备的区域。
2.2 交通流特征关联分析
除对交通流特征进行实时统计分析外,因为通过该模型可融合航道、航标、水位等信息,还可以对船舶的速度与航道宽度、水位、航标报警等因素进行关联分析,例如,分析在水位变化时,某区域的船舶速度与水位的关联程度,或在航标出现异常情况时,对船舶航行速度的影响,从而为航道维护、航道规划的经济分析提供数据支撑。
3 结论
因此通过该时空数据融合模型,可实现不同时空特性的感知数据针对同一对象的数据融合,且部分属性可沿对象轨迹进行延申融合,可将固定位置的数据属性融合扩展到全部区域,从而可对航道交通流特征进行全区域的、更多维度的分析,并且可实现不同维度的关联程度分析。随着引江济淮项目的通航运行,将积累越来越多的感知数据,该模型可结合SPARK 等分布式计算技术对交通流特征进行实时计算,支持海量AIS、雷达数据及其他感知数据的实时融合与分析,为航道及船舶的管理决策提供更完整、更多维度、更实时的数据支撑。