包裹性抓取不规则物品的自反馈机械爪
2024-02-03徐博



在城市建设、医疗服务、娱乐生活等领域,都能见到机械爪的身影。但在实际应用中,老式舵机机械爪在工作过程中需负载抓取,这会影响电机的完整性和稳定性。柔性机械爪则在抓取过程中的稳定性不够强。
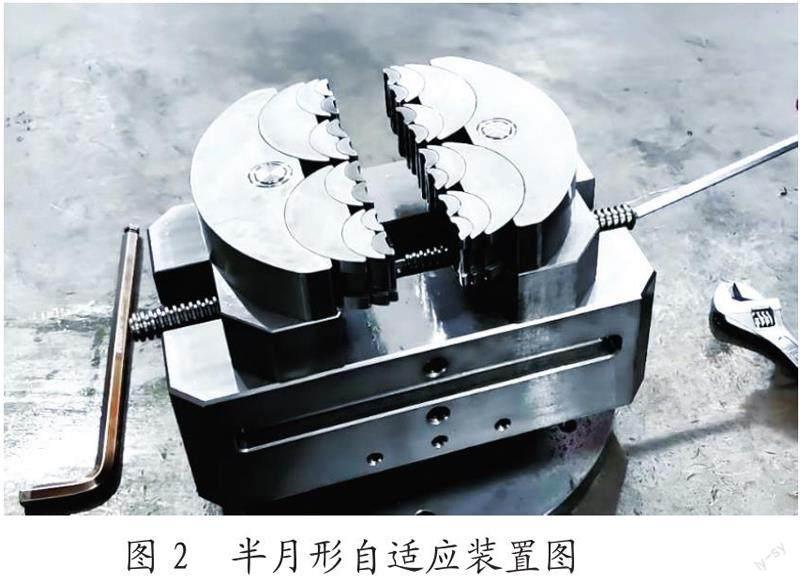
能否在简化电路、减少安全隐患的同时,让机械爪适配更多抓取对象,更合理、准确地抓取?在网络检索时,我发现市面上有一种“月牙形自适应台钳”,其月牙结构可以紧密适配被夹物品,进行试压和工作。这给我的设计带来了启发。
一、设计思路
简化电路,降低设计制作难度,提升运作稳定性保护电路,便于后期维修。采用月牙状爪手,实现包裹性自反馈抓取,提升物品适配度。
二、设计原理
设计电机正转时释放过程的电路,电机反转时抓取过程的电路。
在电源与电机(用电器)间加入双刀双抛开关,对电流进行有效控制。电流通过双刀双抛开关后,二极管和微动开关并联,二极管只可单向通过,保持装置中两组并联电路中的二极管方向一致。
当双刀双抛开关与下侧闭合时,电机正转;与上侧闭合时,电机反转。电机正反转的转换过程不受微动开关开合的影响。
电机正反转决定了与之承接的螺杆的旋转顺逆。当电机正转,螺杆顺时针旋转,“螺母”向上移动,爪手张开,机械爪释放;当电机反转,螺杆逆时针旋转,“螺母”向下移动,爪手内收,机械爪抓取。
微动开关的巧妙安装可以有效保护装置。机械爪在抓取过程中,因物品过大或不适配而无法抓取时,其手臂触碰按钮,断开微动开关,形成物理性断开,保护装置及电路。
三、制作过程
(一)材料与设备
螺丝刀、电烙铁、壁纸刀、剪线钳、胶枪、胶棒、3D打印机等。3D打印结构件、N20螺杆减速电机、7.4 V锂电池、开关等。
(二)制作过程
通过对传统机械爪和变异形机械爪的分析,我以“提高物品适配度,增大接触面积”以及“增加抓取稳定性,简化操作”为制作理念。
针对第一点,起初我参考了虎口钳钳口的半月牙设计,但在设计和完善过程中,我发现其钳口部分单薄,应用在机械爪上不仅不能有效增大接触面积,其支撑和受力情况也受限。之后,我基于一款半月形自适应台钳结构设计机械爪的手部,将“月牙”数量增加至2的n次方。
待结构、电路等部分的构思初步制作完成,我利用3D打印机进行成品的制作以及组装。
四、实验测试
在电路的控制下,电机正转、反转使螺杆旋转。顺时针旋转使其连接的机械爪手臂闭合,逆时针旋转使其连接的机械爪手臂张开,实现机械爪的抓取与释放。
实验过程中,在机械爪抓取物品时,观察其接触面是否严密、抓取后向他处位移时是否稳定、能否顺利抓取等。测试结果如表1。
五、创新点
在设计和制作过程中没有使用傳感器和编程,电路简单,易操作。在抓取释放过程中,机械爪的高适配度通过3D打印技术实现。
利用3D打印技术虽制作便捷,但对被抓取物品的自重有一定的要求。后续将提升坚固性、相互承接的螺杆等部分的润滑程度,减少误差。(指导老师:何斌)
专家点评
徐博同学的包裹性抓取不规则物品的自反馈机械爪,是一件改进型发明作品。这项发明源于他在看到机械爪应用前景良好的同时,也发现了老式舵机机械爪负载过程会影响电机完整性和稳定性、柔性机械爪则在抓取过程中稳定性不佳等不足,于是想到了这项发明课题。
从发明选题方法分析,他利用了缺点列举法,即列举已有事物的缺点来进行改进性发明的思路与方法,青少年称之为“挖缺点”。从解题思路分析,他主要利用了移植法——将“月牙形自适应台钳”的部分结构移植到自己的这项发明中,使现有机械爪具有自适应性和稳定性的新特点。
这项作品的完成,其一,体现了发明人对科技创新的浓厚兴趣,对本人研究成果的分享意愿和严谨的科学态度,对科学研究工作的基本规律和方法的理解等科研潜质。其二,体现了发明人敢于质疑、勇于进取的精神和对现有技术的迁移应用能力。