北斗卫星导航定位基准实时服务格网化方法
——以山东省为例
2024-02-01高士民袁锐田茂荣刘植徐亚力
高士民,袁锐*,田茂荣,刘植,徐亚力
(1.山东省国土测绘院,山东 济南 250102;2.济南市勘察测绘研究院,山东 济南 250101)
0 引言
随着卫星导航定位技术的发展及应用领域的不断拓展,差分GNSS技术也不断突破和创新[1-2],2000年前后,以虚拟参考站(VRS)技术为主要代表的卫星导航定位基准站网逐步建立起来,我国卫星导航定位基准站网在2010年前后,进入发展快车道,经过十几年的发展,已经应用到社会各个领域的方方面面[3]。但是,随着用户数量的增长,尤其是近年来,智慧交通、智慧物流、智慧农业等各行业智慧化对高精度的需求快速增长,卫星导航定位基准站网的服务压力也逐步增大,传统的VRS服务模式将很难支撑海量用户带来的服务压力,服务模式的优化迫在眉睫。
为了提高传统VRS定位模式下服务用户的数量,众多学者进行了多种尝试,目前比较普遍的思路是将传统的VRS服务模式转变为格网化服务模式。李滢等[4]针对地基增强系统空间相关误差区域模型的内插精度,研究了河南省基准站网虚拟格网划分方法,并达到了厘米级定位精度。刘一等[5]基于局域CORS网生成规则网格,利用格网中心点位置改正数以修正普通终端位置来提高定位精度。李立弘等[6]研究了虚拟格网技术的实现流程和细节,分析得到虚拟格网点切换对动态定位的影响在厘米级,对于车载等大并发、动态应用而言,该影响可忽略。陈明等[7]提出了一种格网化高精度卫星导航定位服务的方法,经实地测试表明,该方法的定位精度与常规网络RTK一致,但可显著提高基准站网的用户并发量。杨航[8]提出了一种立体格网划分方法,并利用实测数据进行了测试和分析。黄丁发等[9]构建了面向海量并发用户服务的格网化VRS方法,并分析了在中纬度地区和低纬度地区格网VRS有效服务间距限值,结果分别为12km、7km。
以上研究各有特点并取得了相关成果,但在格网划分密度、立体格网方面的研究依旧偏少,并且立体格网和区域地形紧密关联,目前的研究较少,不具有普适性。本文在上述众多学者的研究基础上,采用传统方格网的划分方法,对格网的适用性进行了研究,同时结合数字高程模型(DEM)信息为格网增加高程信息,实现了山东省卫星导航定位基准实时服务的立体格网化,并通过实测验证了立体格网化后的服务精度与传统VRS模式服务精度相当。
1 立体格网定位技术思路
立体格网定位原理是将服务区域格网化,每个格网生成一个具有高程信息的格网虚拟参考站,该格网内的所有用户使用相同的虚拟参考站进行定位,实现虚拟参考站和用户比例的转变。
如图1所示相同的服务区域内,左侧为传统VRS定位,每个用户终端都需要一个虚拟参考站,右侧为立体格网定位,4个用户只需要1个格网虚拟参考站。立体格网定位显著减少了虚拟参考站的数量,降低了数据中心的计算压力,能够有效提高在线服务用户数量。立体格网定位与传统VRS定位服务流程有很大不同。传统VRS定位服务中,需要用户将单点定位结果上传到数据中心,数据中心为其生成虚拟观测站并实时播发差分信息,用户利用差分信息完成定位。本文提出的立体格网定位服务方法,数据中心首先进行服务区域格网化,用户将单点定位结果上传到数据中心后,数据中心判定用户所属格网,在该格网中心生成格网虚拟参考站并实时播发差分信息,用户利用差分信息完成定位。在该模式下,利用格网内是否存在用户来动态调整格网的状态,如果格网内有用户,则格网属于激活状态,正常计算格网虚拟观测站,并向用户播发差分信息,如果格网内无用户,则关闭格网虚拟参考站,避免无效的计算压力。立体格网定位服务流程如图2所示。

图1 定位原理示意图

图2 立体格网定位服务流程图
2 立体格网构建方法
立体格网是立体格网定位中重要的基础信息,数据中心生成虚拟参考站需要利用格网中心点的经纬度和高程[10],本文提出的立体格网定位方法包括格网划分策略优化、高程信息计算2个关键环节。
2.1 格网划分优化策略
立体格网中心点作为虚拟基准站,生成该格网点的虚拟观测站,其VRS观测值与流动站实现RTK定位,VRS观测值的精度直接决定用户RTK的定位精度[11-15]。格网中心点VRS观测值误差由大气延迟的内插残差和用户与立体格网点间未内插出来的大气延迟差分残差两部分组成,如公式(1)所示:
δν=δm+δn
(1)
对于LIA空间相关误差内插模型,可以认为δn与基线长度成线性比例关系[11],因此δn表示如公式(2)所示:
δn=μ×d=μI×d+μT×d
(2)
式中:μ为双差大气延迟比例因子即单位长度大气延迟变化量;μI和μT分别表示双差电离层延迟比例因子和双差对流层延迟比例因子;d为用户与立体格网点虚拟基准站的基线长度。
δn的误差取决于用户与格网点虚拟基准站之间的基线长度,基线越长,误差越大,计算量越小;反之基线越短,误差越小,计算量越大。因此,保证用户RTK定位精度不损失的前提下,综合考虑VRS观测值的误差项δm和δn,根据δn的误差来寻找最优立体格网大小。因此对格网大小的划分提出以下原则步骤:
(1)计算基准站间大气延迟,并分析双差电离层比例因子μI和双差对流层比例因子μT。
(2)分析双差电离层和双差对流层延迟内插残差δm。
(3)根据δm和δn初步划分基础格网大小和调整幅度,结合服务区域的实测数据确定最优立体格网大小。
2.2 格网高程值获取方法
本文中立体格网高程采样点采用服务区域DEM数据高程值内插方法获取,主要包括格网点搜索邻域的确定、采样点权值的确定、格网点内插函数的选择。选用正方形邻域来搜索高程采样点,利用经典且实用的反距离加权内插函数内插出所有格网点高程值,内插主要步骤如下:
(1)搜索邻域的范围用来确定格网点周围参与内插计算的采样点样本数量,根据采样点样本数量动态调整邻域范围,一般5~10个采样点可满足内插精度要求。若内插点的坐标为(B,L),当采样点坐标(Bi,Li),采样点满足公式(3):
(3)
式中:d为搜索正方形邻域。当采样点数量不满足内插要求时,按固定步长增大邻域范围,直至满足样本数量要求。
(2)利用反距离加权函数对格网点进行内插,获取格网点高程值。设格网点的采样点为(Bi,Li,Hi)(i=1,2,3,…n),n为确定的采样点个数,Dpi为内插点与采样点的距离,Pi为采样点的权,反距离加权内插函数模型如公式(4)所示:
(4)
权重指采样点对格网内插点的贡献程度。由于地形的自相关性,距离较近的采样点对格网点的贡献较大,反之越小。反距离加权计算如公式(5)所示:
Pi=Dpi-u
(5)
式中:经过实验证明,u=2,局部较小区域内与实际地形的匹配程度最高。
3 试验及分析
本文以山东省北斗卫星导航定位基准站网为例,开展了立体格网定位试验验证。山东省北斗卫星导航定位基准站网由124座北斗基准站构成,具备基于北斗兼容其他卫星导航系统的高精度定位基准服务能力,服务模式为VRS虚拟参考站模式,实现了全省陆域及近海岛屿的无缝覆盖。
3.1 格网划分试验
由文献[3]可知,山东区域基准站观测数据质量良好,经过对山东区域北斗基准站之间的双差电离层和对流层延迟的LIA空间线性内插分析[12-15],统计得到山东区域大气延迟的内插残差平均值δm=1.09cm,双差电离层比例因子μI=0.04cm/km,双差对流层比例因子μT=0.07cm/km。初步划分经纬度间隔为1′×1′、2′×2′、4′×4′、8′×8′、10′×10′的立体格网,并根据公式(1)(2)对格网的RTK定位误差进行预测,结果如表1所示。

表1 立体格网RTK定位误差估计
为了确定适宜的立体网格大小,对不同经纬度间隔的立体格网进行RTK定位实验。实验区域为山东省济南市东部,该区域地形高低起伏,在山东区域内具有代表性。随机选取5个测试点并建立临时测量标志,测试点平均间距为7km,每个测试点首先进行24小时的数据采集,并利用周边基准站进行事后RTK解算,得到测试点的精确坐标。每个测试点分别进行传统VRS定位和1′×1′、2′×2′、4′×4′、8′×8′、10′×10′共5个立体格网的RTK定位,每种定位模式测试时长均为10分钟,考虑一天中电离层与对流层的变化因素,分别测试上午和下午2个时段。
图3和图4给出了2个测试点传统VRS定位和1′×1′、2′×2′、4′×4′、8′×8′、10′×10′共5个立体格网的RTK定位误差序列,从中可以看出,传统VRS定位误差曲线最为稳定,1′×1′、2′×2′和4′×4′的立体格网,测试点定位误差曲线较为稳定,平面方向精度可以达到1.5cm以内,高程方向精度达到2.5cm以内,8′×8′、10′×10′的立体格网,测试点在N、E方向定位误差曲线波动较大,U方向部分历元超过了5cm。其他测试点的误差序列具有相似的特征,由于篇幅有限,不再列出其他测试点的定位误差序列。

1—VRS;2—1′×1′;3—2′×2′;4—4′×4′;5—8′×8′;6—10′×10′。图3 测试点1传统VRS及立体格网定位误差序列
表2列出了5个测试点传统VRS定位和1′×1′、2′×2′、4′×4′、8′×8′、10′×10′共5个立体格网的RTK定位结果的均方根(Root Mean Square,RMS)值。从中可以看出随着立体格网边长的增长,定位精度逐步降低,U方向外符合定位精度损失尤为严重。经分析,定位精度降低的主要原因是测试点与格网点虚拟基准站的基线长度变长,其未内插出来的大气延迟差分残差越大,因此定位误差越大。
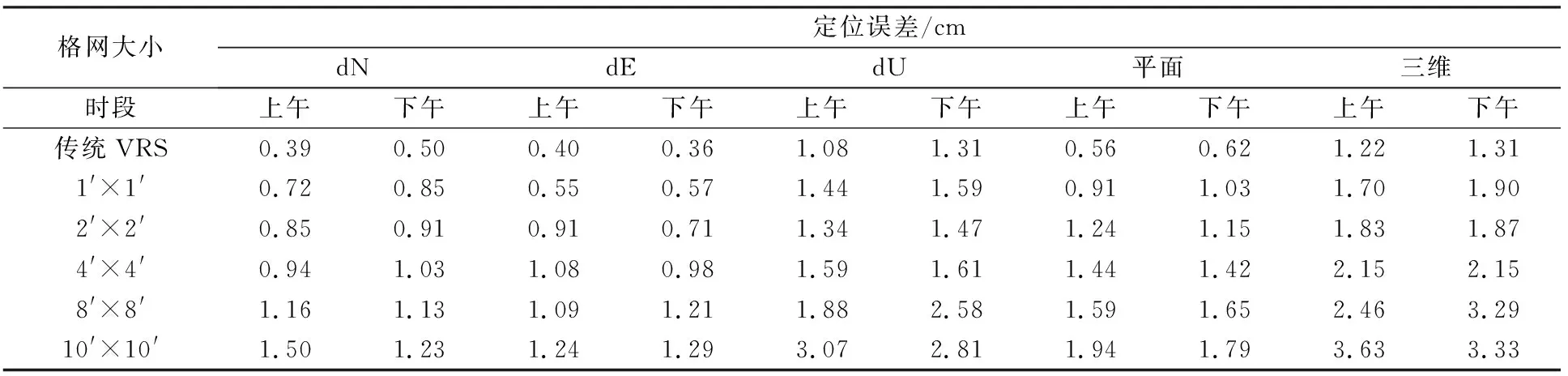
表2 定位结果RMS值
根据图3、图4和表2,结合立体格网VRS理论和真实环境下实测数据,可以确定山东区域的最优立体格网大小为4′×4′。
3.2 野外精度验证
为了验证4′×4′的立体格网的适应性,本文在山东全省范围内进行了RTK定位野外精度验证。综合考虑地形、间距、观测环境等因素,选取了16个测试点,所有测试点均为具有精确坐标的野外控制点,每个测试点分别进行上午、中午和下午3个时段的RTK定位实验,每次RTK定位实验不低于5min,采样间隔为1s。16个测试点位分布如图5所示。

图5 测试点位分布
图6—图8为16个测试点在上午、中午和下午3个时段的定位误差RMS值,从中可以看出在4′×4′的立体格网定位模式中,定位误差在精度范围允许内,平面和高程定位精度均未超出限差,各测试点的定位误差具有一致性和稳定性。

图6 上午时段测试点误差RMS

图7 中午时段测试点误差RMS

图8 下午时段测试点误差RMS
图9为所有测试点3个时段误差RMS平均值,从中可以看出,所有测试点的水平RMS均在1.5cm以下,高程RMS在2.0cm以下,精度相近,无特殊畸变点,表明4′×4′的立体格网在山东区域具有普遍适用性。

图9 测试点误差RMS平均值
表3为所有测试点的定位结果RMS值,从中可以看出,在4′×4′的立体格网定位模式下,测试点实现了厘米级增强定位,平面外符合定位精度可以达到1.5cm以内,高程外符合定位精度可以达到2.0cm以内。大部分测站在中午时段的定位误差大于上午和下午时段的定位误差,这主要是因为中午电离层较为活跃,其对应的双差电离层延迟比例因子变大,未内插出来的大气延迟差分残差变大,一定程度上会降低定位精度。

表3 所有测试点的定位结果RMS值
4 结论
本文基于传统VRS模式的网络RTK技术,提出了融合地形高程信息的立体格网实时差分方法,对格网划分策略、格网大小适用性、立体格网高程获取等问题进行了较深入研究,并在山东区域进行了野外实测验证和分析,结论如下:
(1)根据山东区域北斗卫星导航定位基准站之间的双差电离层和对流层延迟的LIA空间线性内插分析结果,结合立体格网VRS理论和真实环境下实测数据,确定山东区域的最优立体格网大小为4′×4′。
(2)经过山东省平均分布的16个野外测试点的实测验证,在4′×4′的立体格网定位模式下,实现了厘米级增强定位,平面外符合定位精度达到1.5cm以内,高程外符合定位精度达到2.0cm以内。
上述结论可以为省域范围的卫星导航定位基准实时服务的格网化提供参考。受限于人员和测试成本,本文的实测验证中,测试点数相对与全省范围而言依旧较少,后续需要在实际服务中进行用户的精度统计和分析,进一步优化和改进格网化方案。
