GNSS干扰和欺骗检测研究现状与展望
2024-01-31王晓燕杨晶晶吴季达彭子箫
王晓燕 杨晶晶 黄 铭 吴季达 彭子箫
(1.云南大学无线电创新实验室,云南昆明 650091;2.云南省无线电监测站,云南昆明 650021)
1 引言
全球定位系统(Global Position System,GPS)诞生于20 世纪70 年代初,是第一个面向应用的全球导航卫星系统(Global Navigation Satellite System,GNSS),为各行各业提供了精确的定位、导航和授时(Position,Navigation and Time,PNT)服 务[1]。随后,世界各国相继建立了自己的GNSS 系统,如俄罗斯的格洛纳斯(GLONASS)、欧洲的伽利略(Galileo)、中国的北斗卫星导航系统(Beidou Navigation Satellite System,BDS)、日本的准天顶卫星系统(Quasi-Zenith Satellite System,QZSS)和印度区域导航卫星系统(Indian Regional Navigational Satellite System,IRNSS)等。目前,GNSS 在众多传统和新兴应用中提供了准确的定位和授时服务,以较低的基础设施成本实现了全球覆盖[2-3]。例如,GNSS 为海上应用[4]、蜂窝网络[5]、自动驾驶[6]、精准农业[7]、智慧城市[8]以及全球地面特征参数检索[9]、地震监测[10]提供PNT 服务。随着集成电路技术的迅速发展和智能终端的普及,GNSS 市场将在未来十年稳步增长[11]。据调查,全球GNSS 设备的安装数量在2015年达到36亿台,2022年增长到了68亿台,预计2031 将增长到106 亿台,并在未来几年出现的新应用中发挥重要作用[12]。
虽然GNSS 在各领域发挥了重要作用,但由于容易受到干扰和欺骗,其安全问题成为关注的焦点。GNSS 安全威胁主要来自两个方面:信号强度弱以及民用GNSS 有着开放的信号结构[13]。由于卫星轨道较高,GNSS 信号着陆功率较低,容易受到干扰。此外,GNSS 信号在城市环境中存在信号阻塞导致多径传播,导致定位精度降低[11],且该问题的解决难度较大[14]。GNSS 的脆弱性来自物理退化、有意干扰以及无意干扰[11,13]。其中,物理退化是指在复杂电磁环境中信号功率的衰减和散射,包括非视通效应和多径效应[13]。在大气层的电离层中,电子浓度对微弱的GNSS 信号造成无意干扰和有意干扰,其中有意干扰是最有害的干扰类型,因为它专门被设计来干扰GNSS 运行,荷兰ESA/ESTEC 导航实验室对此进行了验证[15]。有意干扰通常分为干扰(jamming)和欺骗(spoofing)两类,其中干扰是来自其他通信系统或发射设备的大功率信号;欺骗指非法设备根据开放的GNSS 信号结构伪造并发送伪GNSS 信号来误导目标接收机。欺骗具有更强的隐匿性,不容易被检测到,因此比干扰更危险[16]。不法分子仅需使用价格低廉的设备就能实施干扰和欺骗,干扰会淹没真实信号,阻止位置、速度、时间(PVT)解算,而伪GNSS信号被广播到接收机后会导致错误的位置、授时和导航信息。严重时,这些错误的位置和时间信息将导致不可挽回的安全威胁、经济损失和军事行动失败等后果[12-13,17]。GNSS 的脆弱性导致其容易受到干扰和欺骗,尤其在城市地区的局限性难以克服,最近已有团队开始研究独立于GNSS 的地面无线和光纤混合系统,通过无线电发射机星座和光纤以太网提供亚纳秒级连接和时间同步,从原理上完全避免了欺骗、多径效应和非视距效应等影响[14]。随着蜂窝网络和无线接入点密度增加,发射机的密度最终可能足以实现城市范围甚至全国范围的覆盖,在此之前,各行各业对GNSS 的依赖程度将继续增长,GNSS 的安全性将是长期关注的焦点。
历史上发生过许多干扰事件引起了严重后果,有些事件曾轰动一时。2011 年,伊朗捕获了一架正在监视伊朗核设施的美国RQ-170 无人机,并于四年后成功复制了该无人机,该事件被认为是美国军事历史上的一个污点[17];2023 年2 月,韩联社报导称韩美空军在演习中模拟敌方无人机入侵的情况,用一种便携的射频干扰器“无人机克星”(Dronebuster)和K2C1 步枪击落了大量敌方无人机[18];2012 年,Humphreys 等人首次研究了电网对欺骗攻击的脆弱性,并提供了对相位测量进行欺骗攻击的成功试验示例,对电网的运行产生了巨大威胁[19];2014 年,著名航班MH370 失联,有专家从技术角度推测MH370很可能受到欺骗攻击,致使飞机偏离原航线后燃料耗尽最终坠毁[20];Humphreys 在2017 年发表的一项研究中引用了一项现场测试[21],一艘65 m 长的游艇被伪信号成功入侵并提供虚假定位数据,从而产生了明显的碰撞风险;2019 年,Regulus Cyber公司在测试特斯拉Autopilot导航功能的试驾过程中,一次有预谋的攻击导致汽车突然减速,同时手动控制失效,车辆最终急速偏离了主干道,自动驾驶存在巨大的安全隐患[22],类似错误的位置信息将会破坏自动驾驶汽车的目的地和路线选择[23-24],甚至劫持有价值的自动驾驶车辆、货物,甚至是目标人员[25]。最近,根据国际航空运输协会(International Air Transport Association,IATA)提供的报告,干扰导致的GNSS 中断的分布地区越来越广泛[26]。根据先进国防研究中心(Center for Advanced Defense Studies,C4ADS)的最新报告[27],GNSS 欺骗不仅被用来误导用户,还被用于完全拒绝GNSS 服务。仅2020 年从中国到加州,从北极圈到新西兰,已经报告了数千起GNSS 服务因受干扰而突发中断事件[28]。2022年,国家无线电办公室和国家无线电监测中心排查并报告了多起GPS 干扰事件,这些干扰遍布全国各省,导致驾校考试车辆GPS 信号丢失,500 多辆考试车辆无法正常使用、导致航道附近区域多架次航班出现GPS 信号丢失触发近地告警复飞、列车GPS 信号丢失导致调度系统无法正常工作等后果,对车辆或飞机的安全行驶造成很大影响。
以上仅列出了部分干扰事件,未来各行业应用对GNSS 系统的依赖度将越来越高,干扰和欺骗将更加严重,相关部门必须更加重视。为防止国外GNSS 的技术垄断和安全威胁,我国自行研制了北斗卫星导航系统,将关键技术牢牢掌握在自己手中。目前我军的作战平台和武器装备以及国家关键基础设施中正逐步配备北斗导航终端,逐步去除对GPS 的依赖,为我国的国防现代化建设事业和基础建设事业保驾护航[29]。长期以来,国家无线电监测中心在省级无线电监测设施中把GNSS 欺骗和干扰监测作为一项重点内容,为民航事业保驾护航[30]。在这样的背景下,GNSS 干扰和欺骗检测有利于及时分辨出恶意信号,对授时和位置服务的可靠性严格把关,因此有着重要的意义。然而,经过多年研究虽提出了许多GNSS 干扰和欺骗检测技术,但文献较为分散,缺乏公开数据集,以至于有关论文相对较少,缺少GNSS 干扰和欺骗检测的全面、细致的综述。因此,针对GNSS 干扰和欺骗检测问题,该文从GNSS 干扰原理与检测技术、欺骗原理与检测技术、实验系统与开源数据集三个层面系统、细致地开展文献综述工作,并进行总结和展望。与最新发表的“GNSS 欺骗式干扰检测综述”[31]一文相比,该文具有以下不同之处:(1)综述了欺骗检测相关的实验系统并作出评价,涉及数据采集方法和公开数据集,这为从事GNSS 相关研究提供了便利;(2)涉及GNSS 干扰的文献综述,这使GNSS 有意干扰检测更加系统和完整。
2 GNSS干扰检测
2.1 干扰和分类
干扰是指在某些GNSS 频带上的无线电频率能量的平均传输,它在相关频带上用功率更高的干扰信号掩盖GNSS 信号,从而阻止位置、速度和时间(Position,Velocity and Time,PVT)计算[13]。如图1所示,真实信号从卫星发射,在达到接收机的过程中受到恶意攻击。导航卫星分布在高度大于19000 km 的轨道上,因此物理信号和数据内容的质量较低,地面接收信号的强度通常小于-160 dBw,开放场景下的典型值约为-155 dBw,室内场景下可降低至-190 dBw[32]。而在地面众多的接收设备中,调频广播的信号强度通常大于-130 dBw,数字信号广播的信号强度通常大于-130 dBw,公众移动通信(2G/3G/4G/5G)的信号强度大于-150 dBw[33]。在这样极低的功率水平下,价格低廉的小型化便携干扰器能够在GNSS 信号频段内产生严重的干扰,严重损害GNSS 信号的质量,甚至使得GNSS接收机的锁相环频率失协,并最终完全失去信号,致使周围几公里内的GNSS 设备瘫痪。而在低信噪比的情况下,接收机要重新捕获是不可能的[34]。

图1 GNSS中的干扰与欺骗场景Fig.1 GNSS jamming and spoofing scenarios
GNSS 干扰可分为有意干扰和无意干扰,两者的区别更多地在于动机而不是干扰效果。例如,接收机受到其他电子设备的热噪声干扰可能是设备无意间发出的,并非针对特定GNSS 设备,即无意干扰;也可能是为干扰GNSS 设备的正常运行,针对设备发出的,即有意干扰。无意干扰还包括特定干扰源,如太阳射电暴和无线电波闪烁[34]。太阳射电暴是太阳射电辐射的强烈爆发,在GNSS 信号中会使载波噪声密度比(Carrier to Noise Density,C/N0)产生超过10 dB 的衰减[35]。无线电波闪烁是由于传播路径上的电子密度不规则引起跨气层无线电波在相位和强度上表现出时间波动,会引起GNSS 在L频段的信号功率衰减超过15 dB[36]。射频干扰是指GNSS 接收机与其他电子设备紧密接触时产生的类热噪声干扰。匹配频谱干扰分配的功率是频率的函数,与接收机跟踪过程中本地副本的权重精确成比例,因此会严重影响接收机的PVT 解算[34]。与GNSS 信号的带宽相比,若干扰信号的带宽较大则称为宽带干扰,如连续高斯宽带干扰,其在频率和时间上很密集,且振幅分布与接收机热噪声的形状相似;若干扰信号的带宽较小则称为窄带干扰,如正弦干扰。从多址扩频系统(如GNSS)中跟踪特定GNSS 信号的接收信道角度来看,相同频率的其他信号都是干扰,且可能具有与真实GNSS 信号频谱匹配的功率谱[34]。根据干扰信号的波形进行分类,主要有连续波干扰、音调干扰、啁啾干扰、脉冲干扰等。图2中按照不同的标准对干扰进行了分类。
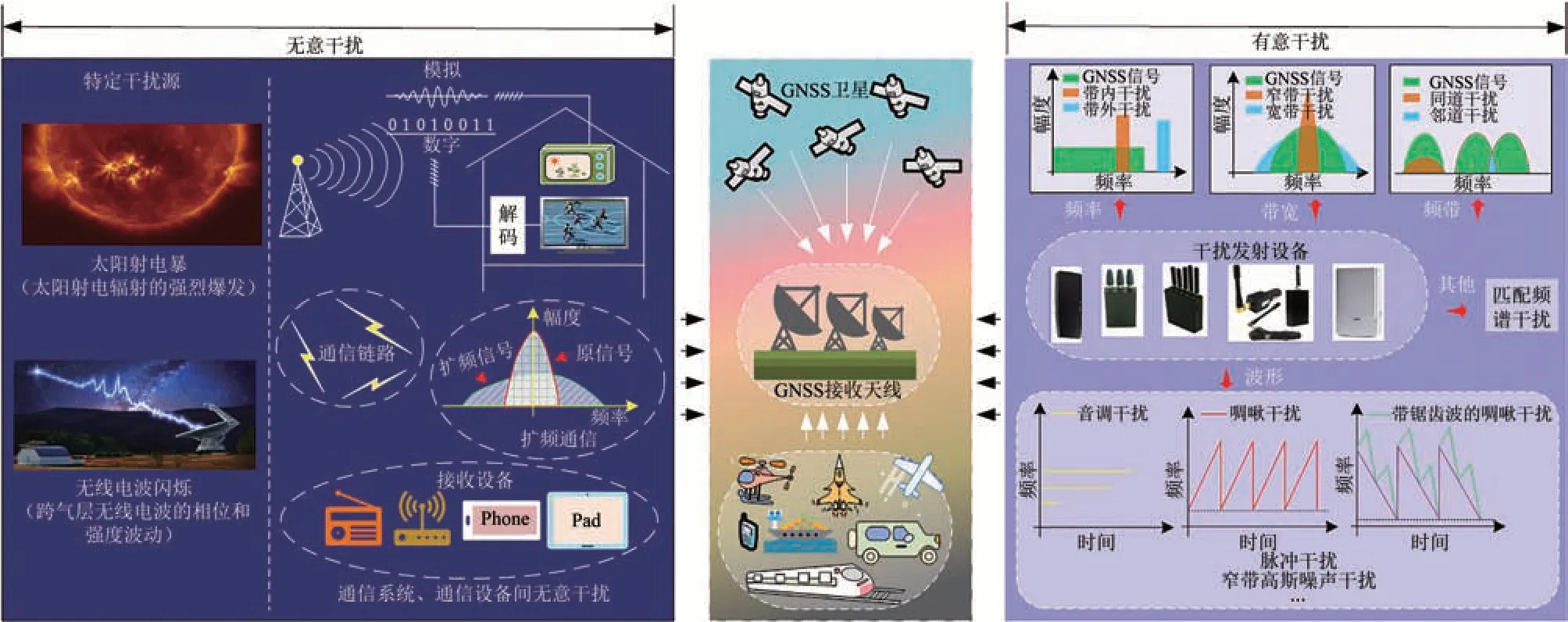
图2 GNSS干扰Fig.2 GNSS interference
近年来,不少研究者对不同的干扰对GNSS 接收机的影响进行了研究和分析。文献[37]进行了相关实验,探索了5种宽带干扰对GNSS接收机的危害:GPS L1 频带内的连续波干扰(Continuous Wave Jamming,CWJ)、GPS L1 频带内的宽带高斯噪声(Wide Band Gaussian Noise,WBGN)、以900 MHz 为中心的全球移动(Global System of Mobile,GSM)通信信号、以1900 MHz 为中心且带宽为10 MHz 的长期演进(Long Term Evolution,LTE)等通信信号分别对GNSS信号进行干扰,随着干信比(Jamming to Signal Ratio,JSR)增加,C/N0开始衰减直至接收机完全失去对GPS 卫星的锁定。在这个测试中,CWJ 和WBGN 对GPS L1 的影响最大,而位于带外的GSM和LTE 信号次之。文献[38]使用4种干扰器产生了脉冲干扰、点干扰、啁啾干扰、阻塞干扰,并研究了它们对GPS 接收机的影响。仿真结果表明,点干扰的影响最大,其次是抑制干扰、脉冲干扰和扫频干扰。文献[39-40]研究了CWJ 对GNSS 捕获过程的影响,表明CWJ 的影响主要取决于干扰幅值和频率、有用信号的多普勒频率等。表1 为常见的干扰模型。

表1 干扰模型Tab.1 Jamming model
表1中,K为干扰数量,PJ为干扰功率,fJ为干扰信号的载波频率,△f为啁啾率,θJ为干扰的相位,fr为脉冲重复频率,φ0为初始相位,β为调频指数,pτ(t)是占空比为τ的矩形脉冲,⊗为卷积运算符,δ(t)为狄拉克脉冲,n(ζ)是方差为的零均值平稳随机过程,C(t)为扩展码,w(t)为高斯白噪声。
2.2 干扰检测技术研究现状
国内外针对GNSS 干扰对接收机的影响方面进行了多项研究并提出大量检测方法,这些方法包括基于统计的干扰检测方法、基于时频分析的干扰检测方法和基于机器学习的干扰检测方法。
2.2.1 基于统计的检测方法
文献[32]提出了一种基于样本协方差矩阵的盲检测方法,在不需要被检测信号的任何知识的情况下,实现了对正弦干扰和周期啁啾干扰的检测。该方法无须了解干扰或信道特征,将干扰检测的问题转化为在GNSS 频段中检测干扰是否存在的问题。幂律检测器(Power Law Detector,PLD)是最简单、最常用的干扰检测方法,该方法测量在有限时间间隔内接收到的信号能量,并将其与预定义的决策阈值进行比较。在已知加性高斯白噪声功率期望值的情况下,PLD 是检测干扰信号的最佳方法[45]。部分频带和窄带干扰在频域使用功率谱密度(Power Spectral Density,PSD)分析,当干扰为振幅、相位和频率未知的正弦信号时,PSD是最优的检测器[46]。
C/N0是确定载波和跟踪环的锁定状态以及控制信道调度的重要度量[47],当接收机受到干扰时C/N0会产生波动,因此可以作为干扰检测的指标。文献[48]根据C/N0在啁啾干扰下的变化来评估其对GNSS 接收机性能影响,结果表明,低成本的接收机更容易受到干扰,而最新一代的GNSS 大地测量接收机具有更强的抗干扰能力。文献[49]使用接收信号的PSD、C/N0来检测单音幅度调制干扰、单音频率调制干扰、连续波干扰、扫后连续波干扰,并进一步分类和定位干扰源。
文献[50]提出了一种基于最大似然估计的干扰检测方法,仿真表明该方法在区分真实信号和受啁啾干扰的信号时表现出较强的鲁棒性,该方法同时还能辨别多径和欺骗。文献[51]提出一套检测、表征和缓解连续波干扰、具有锯齿的啁啾干扰和频率爆发的啁啾干扰,设计了一种非参数大样本t 检验方法,对原假设(即评估的数据是来自均值相等、方差相等但未知的正态分布的独立随机样本)与备选假设(即均值和方差不相等)进行检验,并使用二阶矩能量估计器来检测干扰。文献[52]研究干扰在两种不同环境下对不同GNSS 接收机观测数据的影响:使用廉价汽车干扰器的干扰场景;没有任何有意干扰的室外室内场景。以自动增益控制(Auto Gain Control,AGC)测量值、数字化中频信号电平值、延迟锁定环(Delayed Locking Loop,DLL)和相位锁定环(Phase Locked Loop,PLL)方差以及C/N0测量值为候选观测量,提出了一种新的基于运行数字和(Running Digital sum,RDS)的干扰检测方法,效果优于基于AGC 的干扰检测方法。结果表明,接收器的三个可观测值:C/N0、DLL 方差和PLL 方差,不能真正区分有意干扰和弱信号条件下的干扰,而RDS可以唯一地识别干扰。表2对基于统计的不同干扰检测方法进行了对比。

表2 基于统计的干扰检测方法Tab.2 Statistic-based jamming detection methods
2.2.2 基于时频分析的检测方法
传统的基于时域的抗干扰技术不能有效地抑制宽带干扰,如啁啾干扰。小波变换、魏格纳-威利分布(Wigner-Ville Distribution,WVD)、乔伊-威廉斯分布(Choi-Williams Distribution,CWD)等技术有出色的时频分辨率,可以在时-频(Time-Frequency,TF)域获得干扰信号的更多细节。
文献[44]利用小波技术出色的时频分辨率产生参考啁啾信号(去噪干扰信号),然后将参考干扰信号馈送到自适应预测器,最后从接收信号中减去细化后的啁啾信号,达到抗干扰的目的。文献[42]利用加窗希尔伯特-黄变换(Hilbert-Huang Transform,HHT)分析具有单锯齿、多锯齿的啁啾干扰并使用PLD 检测,仿真结果表明当HHT 的窗长越大时,检测性能越好。WVD 具有良好的时频分辨特性,但存在交叉项问题,难以应用于TF 平面的干扰检测。文献[53]在重分配平滑伪WVD 中使用2D低通滤波平滑函数消除交叉项,提高了信号在时域和频域的分辨率,实验表明改进方法提高了检测率。文献[54]提出了一种基于时频和统计推断的技术来检测不同带宽的连续波干扰、正弦调频干扰、双曲调频干扰和锯齿啁啾干扰。首先,伪WVD分布用于估计接收到的GNSS 信号和已知无干扰信号的时变瞬时频率(Instantaneous Frequency,IF);然后将双总体F 检验应用于IF 的两个方差以检测干扰。仿真表明,所提方法在低干噪比(Jamming to Noise Ratio,JNR)环境下对各种窄带和宽带干扰都有较高的检测率。文献[55]提出了一种用于GNSS干扰检测的重排小波-霍夫变换方法,在受控试验台实验中用于检测GNSS 干扰器产生的啁啾干扰和连续波干扰。结果表明所提方法减少了交叉项的影响,提高了GNSS 干扰检测中的能量聚集特性,比WVD 和魏格纳-霍夫变换(Wigner-Hough Transform,WHT)性能更优。文献[56]提出了一种基于Radon-Wigner 变换(RWT)的双分量扫频干扰检测方法,实验结果表明该方法能有效抑制多分量信号处理中WVD 产生的交叉项影响,检测出交叉频率时变干扰的特征参数。同时,与WHT 相比,该方法能够检测出GPS L1 信号中两种交叉频率的啁啾干扰,抑制不必要的干扰交叉项,表现出较强的能量聚集性,有效提高了GNSS 软件接收机的干扰检测性能。文献[57]提出了一种同时使用霍夫变换(Hough Transform,HT)和CWD 的GNSS 干扰检测方法,对BDS B3I信号中的啁啾干扰进行检测,比传统的WHT技术有更高的检测性能。
分数阶傅里叶变换(Fractional Fourier Transform,FrFT)通过控制阶数可以得到信号从时域到频域的变化特征,为信号的时频分析提供更高的时频分辨率和更多的细节。另外,在实际分析中FrFT可以展开在一组Chirp 基上,分析Chirp 信号时具有较好的能量聚集性,因此十分适合处理Chirp 类信号。文献[58]将FrFT应用于啁啾干扰检测,仿真结果表明该方法比短时间傅里叶变换(Short Time Fourier Transform,STFT)和WVD 等传统方法的检测性能提高了一个数量级。表3对基于时频分析的不同干扰检测方法进行了对比。
2.2.3 基于机器学习的检测方法
近年来,机器学习(Machine Learning,ML)技术作为一种在信号水平上检测异常值的手段在GNSS应用中得到了广泛的探索。
文献[41]将干扰检测视为使用频谱图的图像分类问题。对包括正常信号、调幅干扰、啁啾干扰、调频干扰、脉冲干扰器、距离测量设备类干扰、窄带干扰、宽带干扰进行分类,SVM 准确率为94.90%,卷积神经网络(Convolution Neural Network,CNN)准确率为91.36%。随后,文献[59]提出了一种基于迁移学习的分类方法,将接收信号的时频图、PSD、直方图和原始IQ 星座图像的拼接送入在ImageNet权重预训练的VGG16模型提取特征,最后使用逻辑回归(Logistic Regression,LR)进行分类,平均分类准确率达到98%。文献[60]提出了一种基于时频分析的鲁棒深度学习(Deep Learning,DL)技术,利用迁移学习来表征GNSS 信号中的干扰类型。首先,使用预先训练的CNN 从接收信号的标量图中提取信息特征;然后,使用设计的MobileNetv 模型对8 种干扰进行分类。所提方法的准确率能达到99.98%,在JSR为19~23 dB的范围内检测新样本数据(Unseen data)的准确率为96.86%,这表明模型有迁移能力。文献[61]提出了一种基于贝叶斯算法的GNSS 干扰检测框架,可在不同场景下(多干扰器、不同天线模式)检测并实现动态跟踪干扰源。文献[62]提出了一种低干扰功率下的GNSS 干扰分类器,该分类器由设计的干扰指纹谱(Finger Print Spectrum,FPS)和深度神经网络(Deep Neural Network,DNN)组成。FPS 由信号的TF 分析结果和时间-功率分析结果构成。测试表明,在-100 dBm 功率下,所提出的FPS-DNN 对CW、啁啾等9 种干扰的平均精度达到95%。啁啾信号是最常见、最具破坏性的干扰信号之一,许多文献对啁啾干扰的检测进行了专门的研究。文献[63]提出了一套检测方法,首先使用K 近邻(K Nearest Neighbor,KNN)算法在预相关阶段检测干扰的存在,进一步对干扰进行多分类。仿真结果表明,对10种常见的啁啾干扰类型进行检测时,总体准确率达到了92.6%。表4 对基于机器学习的不同干扰检测方法进行了对比。

表4 基于机器学习的干扰检测方法Tab.4 Machine learning based interference detection methods
2.2.4 评价与总结
基于统计的干扰检测方法在压制功率较高时检测性能较好,但在低JSR环境下检测可能会失效,且基于统计的干扰检测方法是在一定的假设条件下开展研究工作,由于真实环境下信号统计规律未知,这类方法难以满足实际应用场景的需求。基于时频分析的干扰检测方法从时间和频率两个角度对信号进行刻画,能有效地定位频率成分单一的干扰。但当频率成分较为复杂时,时频分布中的交叉项将影响检测结果[54]。另外,某些时频分析方法的时频聚集性有限,这也会影响干扰检测结果。基于机器学习的干扰检测方法分析时域、频域、时频域和数据分布统计等特征,将GNSS 干扰检测问题转化为分类问题,不仅能判断干扰存在与否,还能识别出具体的干扰类别[63]。由于机器学习模型鲁棒性强、自动表征复杂多元非线性关系、可以识别人类可能遗漏的数据趋势和模式、预测结果会随着时间推移越来越准确、泛化性高、人工参与度低等优点,未来将有更多的研究者采用机器学习算法实现GNSS干扰的实时检测、自动检测。
2.3 抗干扰技术
目前,GNSS 抗干扰技术主要包括空间滤波技术、时频滤波技术、辅助抗干扰技术及星上抗干扰技术等[64-65]。文献[66]提出了一种基于子空间理论和空间滤波技术的抗干扰方法,通过分析输入信号自相关矩阵的最优权值与特征向量之间的关系,分析了基于空间滤波器的天线阵列过载情况下的抗干扰性能,给出了干扰入射方向的估计方法。文献[67]通过分析扫频干扰对GPS 信号的影响,提出了一种时域抗干扰技术,根据自适应滤波器的定时复位方法,从而解决扫频干扰对自适应抗干扰滤波器造成的影响,且在抑制干扰的同时又能保护信号。文献[40,56]提出了基于时频分析的抗干扰方法,分别运用小波变换与自适应滤波理论相结合的方法和魏格纳-威利变换来减轻啁啾干扰。空间滤波技术和时频域处理技术在接收机端进行处理,而星上抗干扰技术通过对卫星进行优化、改善卫星信号体制来增强卫星的抗干扰能力,如提高卫星信号的发射功率、发展星链技术、加强频谱管理以及信号结构优化等[65]。
3 GNSS欺骗检测
3.1 欺骗原理
由于民用GNSS 的接口控制文件(Interface Control Document,ICD)对民用卫星导航信号的载频、调制方式、导航电文等相关参数进行了详细的描述和说明[64],欺骗者可使用低廉的设备伪造与GNSS信号结构相似但导航信息不同的仿冒信号以欺骗接收机。不同于干扰,欺骗信号在不中断GNSS 运行的前提下,迫使全球导航卫星系统接收机收到欺骗设备生成的虚假信号导致产生错误的位置或时间信息。
根据欺骗信号对GNSS 矢量跟踪环的影响分析[68],欺骗信号影响目标接收机的跟踪环,通过破坏跟踪信号的一致性,导致环路失锁并逐渐控制目标接收机。图3显示了欺骗的实现过程:(a)欺骗准备。在攻击之前,欺骗设备探测目标接收机的天线以评估其位置和速度,并估计来自目标接收机天线的卫星信号。该阶段欺骗信号与真实信号频率相同、功率更低、相位相差两个码片。(b)欺骗信号的码率迅速调整,逐渐接近真实信号,功率逐渐增大,但仍低于真实信号功率。(c)信号同步。欺骗信号功率不断增加,码相位与真实信号对齐。(d)功率和码率继续增加,跟踪环路在此时继续锁定欺骗信号。(e)信号传输。欺骗信号使用更高的功率电平去除真实信号和目标接收机之间的跟踪环路,实现对欺骗信号的跟踪。(f)欺骗设备完全控制目标接收机。

图3 GNSS欺骗过程Fig.3 GNSS spoofing process
GNSS 欺骗攻击的核心技术是劫持真实信号,使真实信号和欺骗信号之间的相关峰值在目标接收机中对齐,并将欺骗信号同步到跟踪环路,直到欺骗者完全控制目标接收机。为了进一步提高欺骗攻击的成功率,欺骗方还必须结合一定的欺骗策略进行欺骗攻击。常见的攻击策略主要分为两类[69],即重放式(转发式欺骗)攻击和伪造式欺骗(生成式欺骗)攻击。根据信号的复杂度将欺骗源分为简单、中级和高级欺骗源[20]。其中,简单欺骗使用信号生成器与天线发射欺骗信号;中级欺骗源在不破坏信号结构的前提下修改真实信号中的导航数据后将其发射至接收机;复杂欺骗源为多个中级欺骗源分布式协同工作。根据工程实现原理,将欺骗源分为基于信号模拟器的自主产生式欺骗、基于接收机的接收产生式欺骗和基于信号转发器的转发式欺骗[70]。文献[69]将现有的欺骗攻击策略细分为四类,即重放式欺骗攻击(Replay Spoofing Attack,RSA)[71]、伪造式欺骗攻击(Forge Spoofing Attack,FSA)[72]、估计式欺骗攻击(Estimated Spoofing Attack,ESA)[73]和高级欺骗攻击(Advanced Spoofing Attack,ASA)[74]。图4 为不同攻击策略的原理,表5为不同的欺骗策略的特点。

表5 欺骗攻击策略Tab.5 Spoofing attack strategies

图4 GNSS欺骗攻击策略Fig.4 GNSS spoofing attack strategies
由于欺骗信号与真实信号的结构、参数等相似,接收机在缺乏认证等安全保护措施的情况下,无法保证接收信号是否遭受过恶意篡改。恶意欺骗信号有可能使目标接收机产生错误的PVT 信息,如果不能及时发现,将会带来不可估量的危害和损失。因此,必须重视并采用可靠的认证技术,以保证接收到的信号来自认证中心而不是欺骗器。目前,BDS、GPS 和Galileo 正在开发相关的认证技术[69,75]。从接收方的角度来看,如何保证来自信息认证中心的信息完整性也是设计接收机以满足信息认证要求所要考虑的问题之一。然而,信息认证技术在部署之前需要经过很长一段时间的发展,在此期间,欺骗信号的检测和反欺骗是亟待解决的问题。
3.2 欺骗检测
面对日益严重的欺骗威胁,反欺骗技术应运而生——欺骗检测、欺骗识别、欺骗抑制和欺骗源定位,作为反欺骗的第一步,欺骗检测是指通过欺骗信号与真实信号的直接或间接差异检测当前电磁环境中是否存在欺骗,并对真实信号和欺骗信号进行区分的技术。通常,这些差异可能来源于真实信号与欺骗信号的传播路径不同、欺骗信号攻击导致捕获和跟踪阶段的信号特性不同、欺骗攻击策略不同等方面。
全球卫星导航系统包括空间部分、控制部分和用户部分。如图5 所示,真实信号从空间部分的多颗导航卫星发射,穿过电离层到达地面接收机,而欺骗信号来自地面欺骗设备,因此来自不同卫星的真实信号到达接收机的方向、角度不同,多普勒频移的变化较小,而欺骗信号以相同的方向、角度到达接收机,两者的复合信号到达接收机后多普勒频移会在大范围内变化。通过研究欺骗信号的影响[76],当欺骗信号存在时,接收机的相关结果存在多个相关峰;信号绝对功率发生变化同时引起功率变化率、信噪比等相关参数变化。由于欺骗策略不同可能导致信号到达接收机的时延不同,生成式欺骗可以滞后或提前发射信号;转发式欺骗先接收真实信号再放大重发,其时延(T2+T3)和距离(S2+S3)大于真实信号到达接收机的时延(T1)和距离(S1)。由于欺骗信号导致的差异项以及产生的具体原因如表6所示。

表6 由欺骗信号引起的差异[68,70,76]Tab.6 Differences induced by spoofing signal[68,70,76]
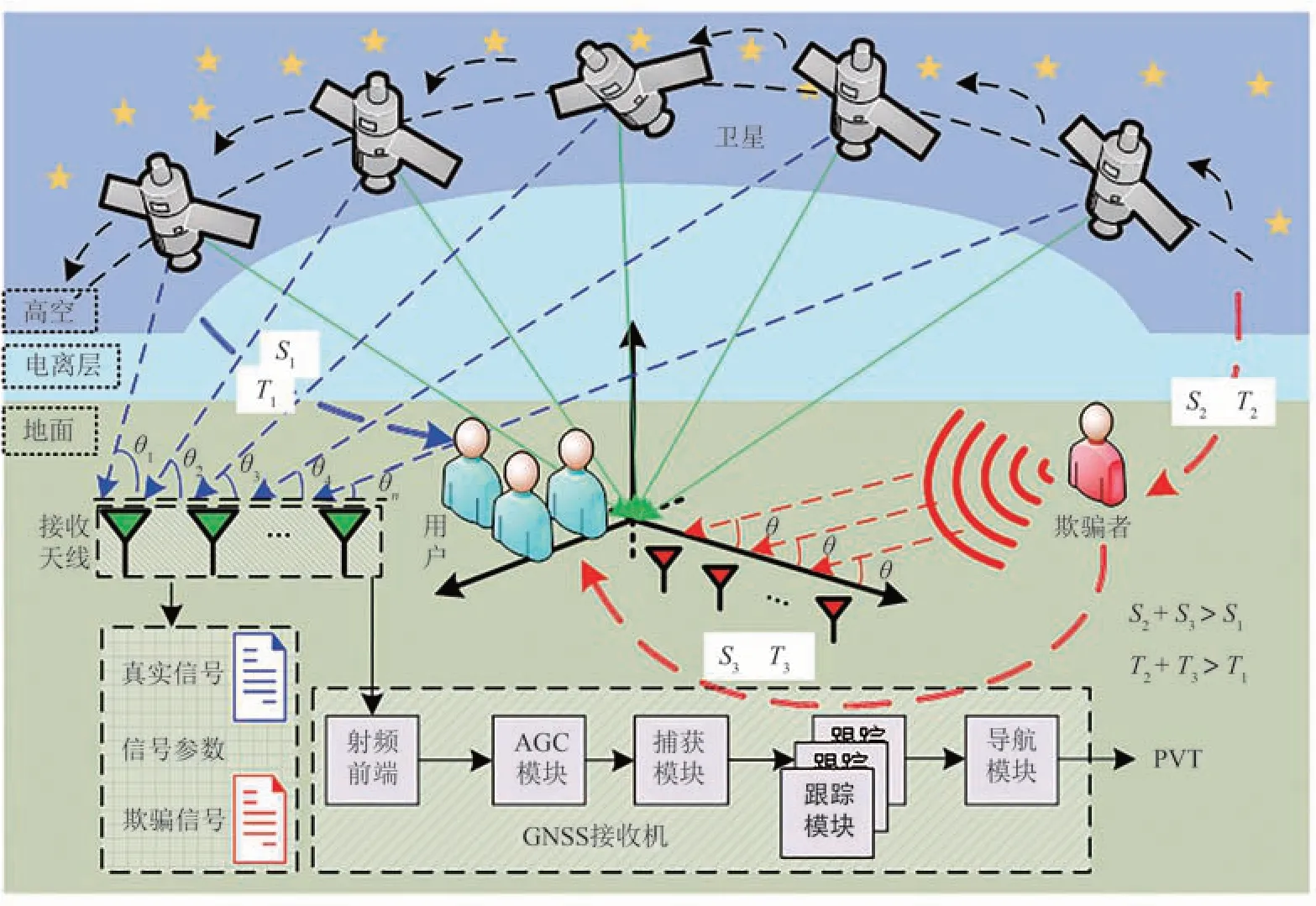
图5 真实信号和欺骗信号的传播特性Fig.5 Propagation properties of authentic signals and spoofing signals
基于上述差异,国内外研究者提出了许多检测技术,这些技术在欺骗检测中表现出了良好的性能,本文以是否采用附加硬件设施、不同处理阶段和不同处理技术为分类标准依次综述这些技术。
从导航信号处理水平上根据是否需要额外硬件将欺骗检测技术分为两大类,即无须额外硬件的检测技术和额外硬件的检测技术。在进行欺骗检测时,射频前端、采集模块、跟踪模块将会输出中间级别的观测量和信号参数,如多普勒频移、相关器输出、信号功率、载波相位、C/N0、ToA 和DToA 等,这些参数可直接获得不依赖于额外硬件。高速运动的导航卫星与地面接收天线之间的相对运动产生了多普勒频移[77],正常情况下多普勒频移在较小的范围内变化,当欺骗发生时,接收机接收的实际信号是真实信号与欺骗信号的复合信号,此时多普勒频移的变化超过阈值。由于检测性能良好且容易实现,基于多普勒频移变化统计的技术被广泛应用[78-80]。当欺骗发生时,复合信号的参数可能跳变或超出正常范围,且不同卫星信号携带的导航信息可能不一致[66],根据这些信号参数或指标的异常变化,可以实现对欺骗信号的有效检测。文献[78]提出了一种基于速度一致性检查的有效欺骗检测方法,通过计算速度来检查多普勒频移和伪距离测量的一致性,在动态和静态场景下对转发式欺骗的检测表现出良好的性能,优于基于伪距离的接收机自主完整性监测(RAIM)方法。由于卫星导航信号参数统计难以伪造,基于信号参数统计分析的检测技术采用信号样本的均值检验、平方和、方差、极大似然估计检验等统计方法,结合相空间特征和载波相位测量等参数,采用设置决策阈值和决策统计等方法,完成欺骗的有效检测[82-83]。当欺骗信号无法抑制真实信号时,捕获阶段出现真实信号和欺骗信号的残差信号[72,84]。文献[84]提出了一种基于残差信号检测来判断码频搜索矩阵中是否存在超过捕获阈值的两个或多个相关峰值的方法,文献[85]在单峰条件下基于生成对抗网络(Generative Adversarial Network,GAN)检测欺骗。仿真结果表明,当欺骗信号的伪码相位和载波多普勒频率与真实信号的伪码相位和载波多普勒频率相同时检测效果较好。根据ToA/DToA 是否在合理的范围变化也能达到欺骗检测的目的[85]。在一些动态场景下,由于接收机的移动可能导致以上方法的性能受到限制,此时通过附加专用数字硬件和软件控制的多单元天线阵列等硬件设施能在一定程度上提升检测欺骗的能力。基于天线阵列的检测技术根据真实信号的到达接收机的方向、角度不同而欺骗信号到达方向、角度相同的假设,在动态和静态场景下具有鲁棒性[31,87-89],由于每个欺骗发射机都需要一个天线来对应它,增加天线数量可以有效防欺骗。子空间投影是一种常用的信号处理方法,选择合适的信息来构造子空间是子空间投影技术的关键部分[90]。通过求解空域欺骗信号的子空间投影,可以有效地检测和消除比真实卫星信号功率更大的欺骗信号[91]。欺骗和真实信号到达时间差影响了接收机多相关器输出,导致相关峰畸形。信号质量监测(SQM)[92]根据接收机跟踪阶段的早码、即时码和晚码相关器的输出值突变或偏离正常水平判断是否受到欺骗,是目前应用最为广泛的一类技术[93-94]。
根据卫星信号的生成到实现导航定位过程可将欺骗检测分为基于导航数据信息的欺骗检测、基于空间处理欺骗检测、基于射频前端欺骗检测、基于基带数字信号处理欺骗检测、基于定位导航运算结果欺骗检测和基于机器学习的欺骗检测[31]。由于民用信号的结构和参数是公开的,欺骗者很容易就能仿造信号,基于导航数据信息的欺骗式干扰检测技术[95]通过添加安全信号组件、增加不可预测的信息来改变民用导航信号的导航电文和扩频码、直接使用军用导航信号进行身份验证,从源头上阻止了欺骗行为,但实施难度较大,甚至需要从国家层面调整卫星导航信号体制[96]。AoA、DoA是接收信号的两种典型的、难以伪造空间特征信息,文献[88-89]通过对信号的来向进行估计和检测,在复杂欺骗场景中性能较好。基于射频前端的检测技术主要通过监测信号的AGC波动水平来检测欺骗[97],由于欺骗信号的功率提升不大,因此该方法对欺骗检测的效果稍差,而对噪声干扰的检测效果较好。接收机中的基带数字信号处理模块处理中频信号,经捕获与跟踪后获得GNSS 伪距和载波相位等观测值。欺骗信号和真实信号经该模块处理后接收信号强度[98]、信号质量[93-94]、多普勒频移一致性[78-80]、到达时间[86,99]等方面出现明显的差异,当指标的变化超过阈值时可检测欺骗。基于定位导航结果的欺骗检测技术利用接收机解算过程获得的伪距[100]、速度[101]信息一致性或利用高精度辅助设备测量值来与接收机数的一致性来检测欺骗[100-104]。由于辅助设备不受电磁干扰的影响,因此该方法在动态和静态场景下检测效果较好,但需要部署额外测量设备,成本高昂,不适合大范围普及。机器学习在分析大规模数据、挖掘数据深层特征等方面有着更为明显的优势,且算法日渐成熟,应用遍布各行各业,在GNSS 欺骗检测中更是表现出比传统方法更简洁、更高效的特点,深度卷积神经网络[105]、生成对抗网络[85]、支持向量机[41,82,106]等被用来从信号功率、C/N0、相关器输出、和伪距等信息中挖掘特征和识别欺骗,且达到了较好的检测效果。表7 列出了几种代表性欺骗检测方法及其特点和评价。

表7 欺骗检测方法Tab.7 Spoofing detection methods
3.3 抗欺骗技术
欺骗抑制技术主要包括残留信号检测[81]、天线阵列技术[107]、接收机自主性监测[108]、加密认证技术[69]和外部辅助技术[109]等。由于欺骗信号功率较大,与真实信号叠加后在接收机捕获和跟踪阶段会使相关峰明显变大,利用跟踪通道的参数可重构中间信号,叠加信号减去中间信号可以达到欺骗消除的效果[81]。天线阵列技术通过自适应波束形成实现欺骗缓解[108],自适应波束形成消除来自相同方向的欺骗,并保留来自全球导航卫星系统卫星的未失真信号。当接收机同时收到真实信号和欺骗信号时,接收机自主性监测可用来检测欺骗,并能从一颗或多颗卫星被欺骗的场景中恢复定位,但当接收机的所有卫星均被欺骗接管时该方法失效[109]。加密认证技术是指通过在信号体制中注入加密信息,接收机鉴权成功后解算定位,常见的加密认证方式包括扩频码加密、导航报文认证、协议认证、传播码认证、传播码加密、水印技术和组合认证等[66]。一些高精度测量设备如惯性导航系统具有独立性、抗电磁干扰和可靠度高等优点而被用于辅助卫星导航系统进行定位[109],当受到欺骗干扰时能够及时对定位进行修复,提升定位精度。
4 实验系统和数据集现状
4.1 实验系统
在过去的几十年中,GNSS 接收机技术有了长足的发展。如今,有许多GNSS 软件定义无线电(software defined radio,SDR)解决方案可用,其中原始GNSS 数据的基带信号可用于开发、测试和研究新算法。依赖于原始IQ 数据的新算法可以满足不同的目的,例如增强采集和跟踪算法的鲁棒性、增强采集和跟踪阶段的抗干扰能力、减轻多径影响、大气影响和其他干扰设备带来的影响。为进行GNSS 干扰-反干扰技术以及欺骗-反欺骗技术的研究,从信号、干扰及欺骗的产生、处理和发射到接收端的接收、处理和解算过程,构成了一套实验系统。按照信号源和接收端的主要设备将实验系统分为两类。第一类为模拟系统,信号源或接收端中包含价格昂贵且高度集成的信号生成、采集和处理设备[62,110,114],如GPS 模拟器GSS8000、GNSS 中频信号采集器HG-SOFTGPS06、干扰信号生成器Tektronix AWG7122、矢量信号分析仪NI VST PXIe5645R 等。第二类为基于真实环境的实测系统[112-118],GNSS 接收机接收卫星信号,由树莓派、FPGA 开发板、Hack RF SDR 等编程产生欺骗信号,或使用低成本商用干扰器产生干扰信号并由天线发射,接收端由GNSS 天线接收信号、GNSS-SDR 接收和解算时间位置信息。
表8 列出了一些近年的GNSS 干扰和欺骗检测实验的相关信息,包括信号产生装置、干扰装置、欺骗装置、接收端的接收天线、信号接收或处理装置、干扰或欺骗的检测技术以及对实验系统的评价。其中,模拟系统集成度较高,产生信号、干扰或欺骗的流程更为简单,信号发生设备可以产生或接收不同频率和不同星座的信号,编程难度较低,可实时查看信号状态,但价格昂贵,对入门者和中小研究机构来说难以负担[29]。实测系统基于物联网开发模块和传感器、SDR、GNSS 接收机等,成本较低,可扩展性强,实现难度一般,但系统的稳定性一般[115]。

表8 GNSS干扰和欺骗实验系统Tab.8 GNSS jamming and spoofing experimental system
4.2 数据集
SDR 原始数据(IQ 样本)通常需要大量的内存空间才能存储,并且在当前文献中仅公开提供了很少的数据集。GNSS 信号模拟发射源和信号采集设备较为昂贵,实时采集需要花费大量人力和物力且出错概率较高,研究者为便于研究GNSS 干扰和欺骗技术制作了开源数据集,分为干扰数据集[41,59,111]和欺骗数据集[111,119-121],表9为数据集的获取方式。

表9 公开数据集Tab.9 Public datasets
数据集[41,59]仿真了GPS L1 信号和5 种干扰,包含调幅干扰、啁啾干扰、调频干扰、脉冲干扰、窄带干扰。其中,数据集[59]为真实信号和五种干扰的I/Q 数据,[41]为干净信号和受到这五种干扰攻击的时频图。GPS L1 信号和干扰信号的C/N0和JSR分别在25 dBHz~50 dBHz 和40 dB~80 dB 之间均匀分布。数据集制作流程参见[41]。数据集[111]包含两种干净信号Galileo E1和E5以及啁啾干扰和调幅干扰。干扰数据集[41,59,111]可用于分析不同类型干扰对GNSS信号的影响以及干扰检测算法的验证。
GNSS欺骗数据集包括GATEMAN[111]、TEXBAT[119-120]、OAKBAT[121],欺骗信号由卫星信号模拟器生成并由天线发送。GATEMAN 由芬兰坦佩雷大学无线通信研究团队开发,在真实环境中模拟了欺骗场景,并使用USRP 记录数据。TEXBAT 是德克萨斯大学发布的用于评估欺骗检测和缓解的数据集,包含6 个静态场景和、2 个动态场景以及2 个“干净”参考场景。对于静态场景,参考天线(Trimble Geodetic Zephyr Ⅱ型天线)放置在德克萨斯大学校园大楼上;对于动态场景,天线为车载Antcom 53G1215AXT-I 型天线。TEXBAT 是目前公认的权威数据集,在欺骗技术研究、欺骗影响、欺骗检测、欺骗缓解研究中发挥了重要作用。OAKBAT 是美国橡树岭国家实验室发布的欺骗数据集,被称为是TEXBAT 的“兄弟”数据集,进一步丰富了欺骗场景。OAKBAT提供关于每个数据集的更详细的元数据和上下文信息,例如欺骗和/或干扰信号开始的精确时刻、所使用的位置、可见的星座等,支持使用者复现所有过程。OKABAT 不仅提供GPS L1 信号,还增加了Galileo E1信号,并提供了用于生成和数字化数据的确切设备、配置、场景文件和参数,使研究者们可以进一步确定可能出现的意外结果的根源或创建自己的数据集。欺骗数据集[111,119-121]可用于分析欺骗对GNSS 信号的影响、验证欺骗检测算法的性能、验证欺骗缓解和消除算法的性能。
GNSS 干扰和欺骗的公开数据集较少,且数据质量和可用性参差不齐。TEXBAT 的引用率较高,在GPS 欺骗技术、欺骗检测、欺骗缓解技术研究等方面贡献了学术价值,是目前最流行的数据集。新近发表的数据集OKABAT 增加了Galileo E1 信号,丰富了实验场景,目前知名度较低。数据集[59]提供了真实信号和啁啾干扰的IQ数据,其他参数表述不详,具有一定的可用性。数据集[41]仅提供了GNSS 干扰的时频图,其他数据集缺乏采集场景、采集设备、接收机参数等相关信息,在实际研究中难以利用。
5 总结和展望
GNSS 提供定位、导航和授时服务,被广泛应用于各行各业。恶意发射的干扰和欺骗信号严重危害了GNSS 接收机的运行,导致PVT 服务中断、产生虚假的位置和时间信息,对各领域造成了严重威胁。该文综述了GNSS 信号中常见的干扰和欺骗类型以及相应的检测技术,并着重分析了不同检测方法的检测效果和优缺点。最后,介绍了常见的实验系统以及公开数据集。
结合当前的研究现状,对今后的研究做出以下展望:
(1)随着数字信号处理和软件定义无线电GNSS 欺骗收发器的硬件实现的进步,恶意干扰事件将继续增加,且干扰和欺骗技术也将变得更加复杂,这将进一步威胁到依赖于GNSS 提供授时和位置服务的应用和基础设施的安全。这些欺骗和干扰轻则降低GNSS 的服务质量,重则严重损害财产安全和国家安全,因此,必须高度重视GNSS 安全问题,采取相应的政策保护GNSS 安全,加大力度打击违法行为。
(2)GNSS 干扰和欺骗检测技术大部分还停留于理论研究,尚无应用到实际的监测工作中的案例。将人工智能与GNSS 干扰和欺骗检测结合,并开发专用监测系统将是无线电监测应用的发展方向。
