机载激光雷达测量技术及其在桂钦高速中的应用研究
2024-01-31王鸿飞谭若愚
王鸿飞,谭若愚
(中铁七局集团有限公司勘测设计研究院,郑州 450016)
0 引言
机载激光雷达是集激光扫描仪、GPS 和IMU于一体的空间位置信息采集技术,以无人机作为搭载平台,能够快速、准确地获取高精度的地面地形数据[1].相较于传统测量方法,具有作业成本低、效率高、精度高等优点,且作业时受外界环境影响较小[2],这项技术的突破被认为是测绘领域继全球定位系统之后的又一重大技术革命[3].
1 航飞方案
桂林—钦州港公路(永福三皇至柳州段)项目地处广西壮族自治区中北部,线路全长79 km,测区沿线地形以山地、丘陵为主,地形起伏较大,植被茂盛.项目要求制作线路面积约55.5 km2的1∶1 000 比例尺数字高程模型,传统测量手段难以满足项目工期和测量精度要求[4],最终采用了无人机机载激光雷达测量方案.本项目作业测区约为55.5 km2,设备为SZT-R1350 无人机机载激光雷达,飞行共计79架次.

图1 测区范围线
1.1 航线规划参数设置
根据项目提供的KML 区域、DEM 高程进行初步规划,结合现场踏勘了解的地表情况,对飞行高度、飞行速度等作进一步调整,以保证数据采集作业的安全性与有效性.
航飞参数设定飞行高度为400 m;飞行速度为9 m/s;有效扫描角度为90°;航线带宽为400 m;线扫速度为30m/s.由以上确定好的参数可以计算得到单条航线点云密度平均为6.9 点/m2,航线重叠之后满足项目要求的4 点/m2.
1.2 设备检校
检校平行与垂直交叉航线各飞3 条,往返航线重叠区为80%,交叉航线垂直角度为85°~95°,检校区域地面有建筑物、平坦路面、路灯、电线杆等特征地物,通过往返航线与交叉航线可分别检校出俯仰角、翻滚角误差以及航向角误差.
1.3 点云数据采集
基站架设,基准站的数据精度会影响机载传感器的整体偏差,进而影响点云数据的解算精度[5].在测区中部区域选择一处空旷且不受干扰的位置架设基准站,设静态模式、采样间隔0.5 s、卫星高度角15°.
以IMU 坐标系为基准,测量激光、相机、GPS天线到IMU 中心的偏心矢量.使用高精度全站仪精确测得设备各个基准点的坐标,计算出IMU 三个轴面的空间法向量,进而计算出激光、相机、GPS天线在IMU 三个轴上投影分量,即到IMU 中心的偏心矢量.
对测区进行实地勘察,选择一处平坦开阔区域,使用CLMS01 软件连接设备,在惯导初始化完成后,按规划的航线飞行采集数据.采集作业结束后,检查数据是否存在缺失、偏离航线、不满足精度等问题,以确定是否补飞或重飞.
2 点云数据处理及精度分析
2.1 点云数据融合
Inertial Explorer 软件是NovAtel 公司Waypoint研发的一款事后处理软件,可用于处理所有可用的GNSS、INS 数据,提供高精度组合导航信息,包括位置、速度和姿态信息[6].针对精度和稳定性要求比较高,不需要实时导航定位信息的应用,可以通过GNSS 和INS 原始数据后处理的方式,提高组合导航解算精度和稳定性.
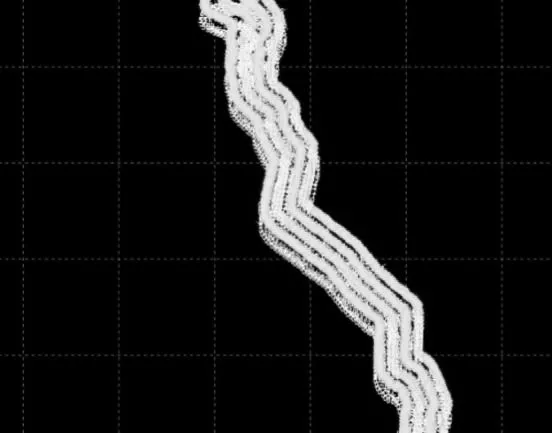
图2 POS轨迹图

图3 紧耦合处理图
使用Inertial Explorer 软件对流动站数据、IMU数据、基准站数据进行GNSS 差分、TC 紧耦合处理后解算出具有位置信息的轨迹数据,输入前期量取的偏心矢量.完成轨迹解算后,通过查看轨迹的卫星数量和PDOP 值来确定该条轨迹的解算质量,参与解算的卫星数≥8 颗,PDOP 值≤3,认为该轨迹可以进行后续的点云融合.
将解算好的轨迹数据和扫描仪数据导入PointProcess 软件,设置检校参数,根据激光点反射率及距离进行粗滤波过滤噪点,得到高精度位置信息的点云数据.
2.2 点云分类
在TerraScan 软件中建立项目工程,对原始激光点云进行分块,为方便数据组织管理,分块采用1 km×1 km 的矩形分块,分块左下角坐标是1 000 的整数倍.设置航迹文件存放目录,以便进行航带匹配和重叠区裁剪,并检查点云覆盖确认是否存在飞行漏洞,以及点云航带匹配是否良好.编写批处理项目分块的宏命令,主要内容包括:分配航带号、裁除重叠区、分离多路径效应产生的低点、分类地面点.分类宏的各个参数需要多次试验,找到最优宏参数.运行宏,设置分区块外扩30 m,减少分类时分区块边缘造成的错分、漏分.
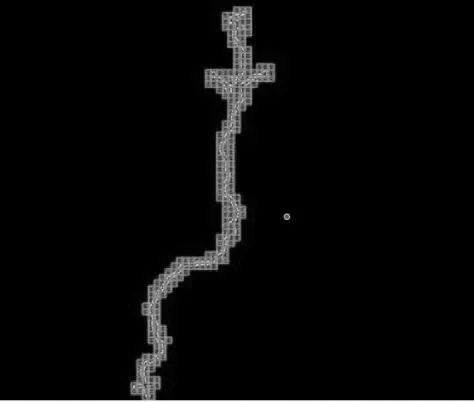
图4 点云分块
利用自动分类好的分块数据和快速正射影像,在TerraScan 软件中结合快速正射影像和TerraModeler 对激光点云进行人工精细分类处理[7].结合模型异常消除错分类为Ground 的low points 和low vegetation,以及因地形复杂,出现地面点分类不精确的情况.结合影像判断激光点的类别,消除错分类为Ground 的buildings,辅助陡坎、悬崖上不易识别类型的点进行正确分类.
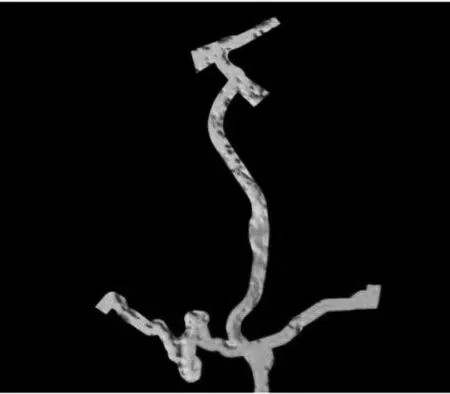
图5 点云覆盖情况
检查陡坎分类时,断面方向取平行于陡坎的方向,断面宽度取0.1~3 m;通过数字表面模型检查漏分的山头,使用画断面的半自动分类方法,将山头的点重新分类到地面点;针对低矮灌木错分导致在模型上形成的高亮毛刺,直接在数字表面模型上确定错误点,将错点从地面点中分离出去,毛刺的高程误差均控制在0.2 m 以内;根据断面上房屋与周围地面的高差,使用刷子工具将房屋点从地面点直接剔除;在桥梁连接地面处,通过断面判断桥梁和地面的分离位置,将错误的桥面点从地面点中分离出去;平行于陡坎方向画断面,确定陡坎的位置,使用刷子等工具将陡坎点补归到地面点类,地面0.3 m 以上的田埂、陡坎等地形特征都在Ground中表示出来.
2.3 精度分析
利用GPS-RTK 的测量方法获取的70 个检查控制点分别对植被茂密区域和一般区域的点云数据进行精度检验.如表1、表2 所示.

表1 植被茂密区域检查点精度统计表
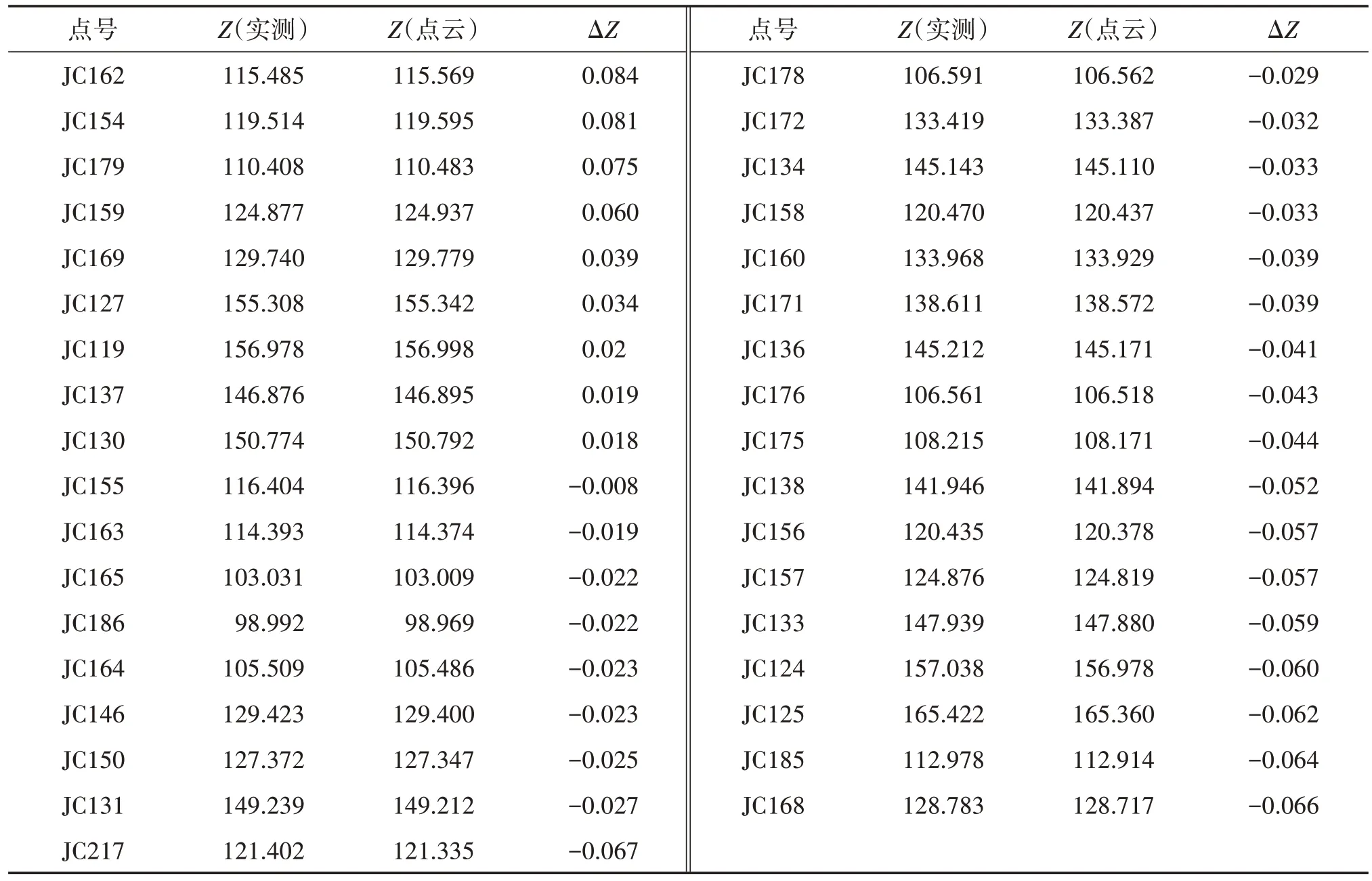
表2 一般区域检查点精度统计表
由表1、表2 数据分析可知,植被茂密区域检查点的最大高程偏差ΔZ 为0.103 m,一般区域检查点的最大高程偏差ΔZ为0.084 m.根据《机载激光雷达数据获取技术规范》(CH/T 8024-2011)要求,1∶1 000比例尺点云数据高程中平地、丘陵、山地误差分别为:0.15 m、0.35 m、0.5 m,该项目点云数据的高程精度稳定可靠,满足项目精度要求.
3 结语
本文对机载激光雷达测量技术的航线规划参数设置、设备检校、点云数据采集进行了详尽的叙述,主要对其点云数据处理过程中点云融合方法和点云分类方法进行了较为细致的研究和探讨,最后得到了以下几条结论:
(1)通过精度分析验证了无人机机载激光雷达测量技术能够满足大比例尺数字高程模型的测量精度要求,相较于传统测量手段,该方法极大地提高了工作效率和自动化程度,为项目后续工作开展提供了有力的保障,对今后类似的测量项目具有指导意义.
(2)采集地面点信息时,由于激光点云数据量大的特点,采用点云自动分类时容易在地面特征点选取时出现错误,因此需要结合快速正射影像和TerraModeler 对激光点云进行人工精细分类处理.
(3)尽管机载激光雷达测量技术在范围较大、环境较为恶劣的测量项目中具有技术和经济方面的优势,但针对测区内部分茂密丛林与河流区域,机载激光雷达难以获得高精度的地面点信息,需要传统的测量手段辅助,以补足缺失的地面数据.
