列车自动驾驶(ATO)季节性调节方案探讨
2024-01-30张帆
张 帆
(卡斯柯信号有限公司,北京 100070)
1 问题来源
目前一般地铁线路列车自动驾驶(Automatic Train Operation,ATO)采用固定的控车策略。随着列车制动系统性能的变化,自动驾驶停车精度会有一定范围的浮动,对于有些地铁线路,停车精度会随着季节变化而出现周期性变化,比如夏季多出现过标、冬季多出现欠标。此时列车会超出地铁站台的停车窗口,列车自动驾驶的停车位置会超出站台门的范围,导致无法打开列车车门与站台门。
究其原因,是列车响应的制动性能(以测出的加速度表示)出现了偏差。如图1 所示,可以看出在夏季,列车的制动性能可能会随着气温的升高,在曲线后段(多为气制动介入后、电制动-气制动转换过程中)列车实际的减速度会变小、偏离ATO模型中的期望加速度a0(图1 中虚线)。在冬季,由于气温变低,列车的制动性能可能存在一定程度的增大,在曲线后段(气制动介入后、电制动-气制动转换过程中)列车实际的减速度会变大、偏离ATO 模型中的期望加速度a0(图1 中虚线)。
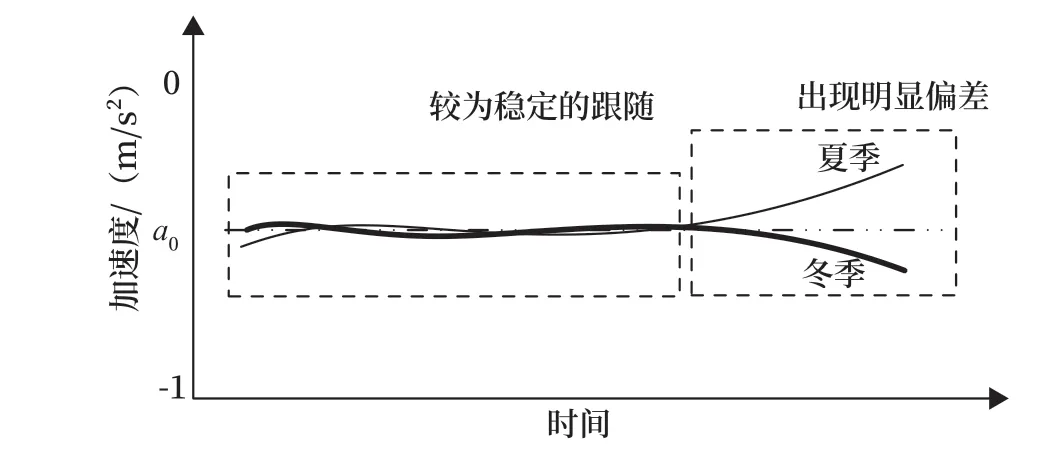
图1 夏季、冬季列车停车加速度跟随曲线示意Fig.1 Schematic diagram of train stop acceleration following curve in summer and winter
2 解决方案探讨
依据ATO 控车原理,针对此问题笔者认为可采用下面方法执行。
由于ATO 停车精度季节性变化的根本原因为列车气制动性能的不稳定性和周期性变化,车辆方可以将制动性能优化,提高稳定性,ATO 停车精度会有较好表现。
一旦车辆无法继续优化制动性能,需要ATO 做补偿性优化。此优化基于ATO 自动判断,进而改变ATO 对列车制动系统的控制策略,最终实现ATO 在站台精确停车。优化流程主要分为两个步骤:
对切换ATO 控制策略时机的判断;
确定控制策略中包含的内容(策略组)。
2.1 切换ATO控制策略的时机
ATO 停车精度的变化可以有多种表现形式。如不同运营时段、不同季节,甚至带有一定随机性的变化。可将各种外部因素当作触发条件,匹配出不同的ATO 策略。笔者遇到较多因季节变化而造成的ATO 停车精度变化,所以暂以此为主因素输入进行ATO 相应的优化方法的阐述。
如图2 所示,先以地铁列车制动性能变化最明显、表现最为极端的夏季与冬季制定基础性的策略组分区,选取一个合适的时间点在两种策略组之间制定切换时机,即切分点1。
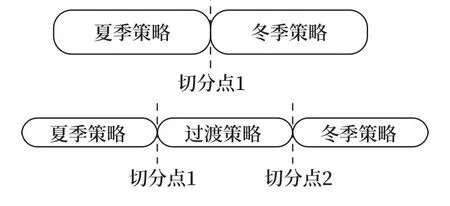
图2 按夏季、冬季、过渡策略切分示意Fig.2 Schematic diagram of segmentation by summer, winter and transition strategies
由于夏季与冬季的ATO 调节策略可能存在较大的差距,如果以单一固定点切换点作切分,在切分点前后停车精度会有一个较大幅度的整体偏移。为避免过于机械僵化的切换,可在夏季与冬季策略之前添加若干个不同的切分点,如图2 所示,这样就可以按照实际需要增加策略组切换的平滑度,使ATO 自动补偿调节向无感化靠拢。
2.2 切换ATO控制策略的时机
针对策略中具体调节内容项的选择,从ATO控车逻辑与实际应用出发,选取以下3 种主因素。
1)ATO 模型中的预期减速度
如表1 所示,列车气制动一般以制动缸压力为衡量标准,故每次对ATO 系统发出的制动指令信号响应的偏离值是以压力绝对数值大小为标准,如±20 kPa。而ATO 停车精度的效果实际是与偏差的百分比相关。所以相同的制动性能偏差对不同大小的基础制动缸压力而言,造成的制动百分比效果是不同的,如图3 所示。

表1 车辆制动系统对不同级位响应减速度偏差Tab.1 Deceleration deviation of train braking response to different levels
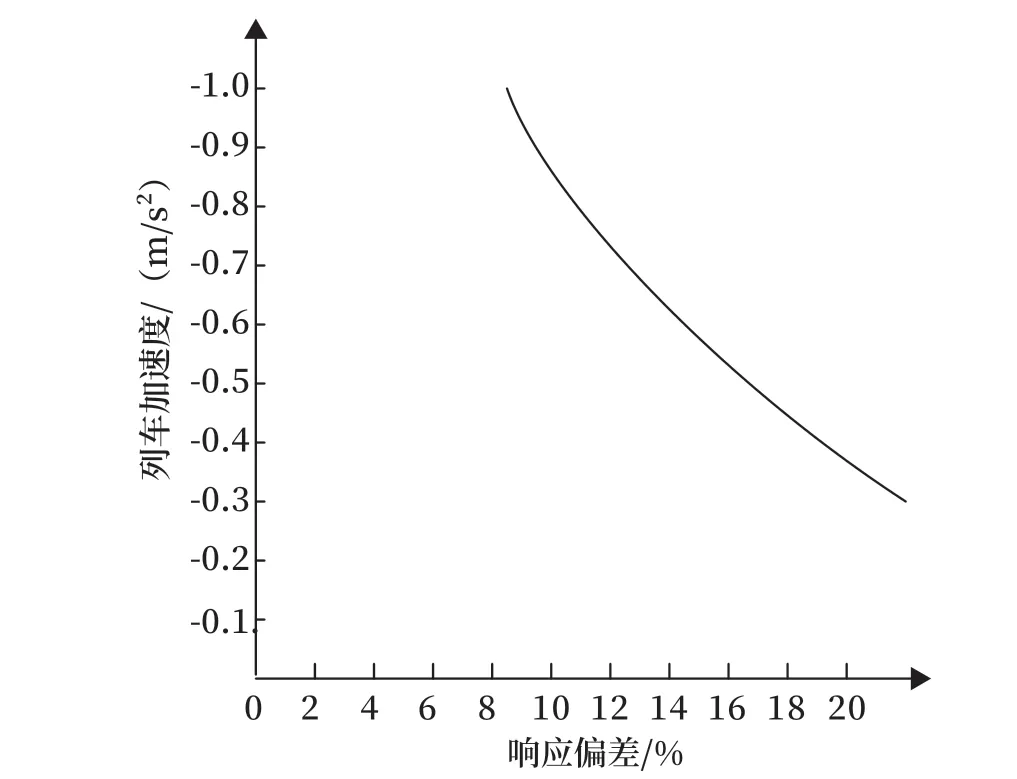
图3 停车减速度-响应偏差关联示意Fig.3 Schematic diagram of train stop deceleration-response deviation correlation
根据实际应用经验,当上述偏差在10% 以内时,ATO 使用预先设置的停车减速度并稍加修正命令级位,就有很高概率将列车控制在理想的停车范围内(如ATO 实际停车位置在停车窗30 cm 以内);
当上述偏差在10%~20%时,ATO 对停车精度有一定的调节能力,可利用在ATO 停车策略中精调过的滑模控制、比例积分控制对列车的加速度进行闭环反馈调节计算,并输出给车辆相应的制动指令与级位,进而可以较为稳妥地将列车停进最大停车窗(如标准停车窗±50 cm 以内)。
当上述偏差大于20%时,预先设置的单一ATO 控制策略对列车车速、减速度的控制力下降,易出现在站台停车过、欠标的情况。
因此,在条件允许的前提下,可以适当将ATO停车模型中的减速度调高,给车辆响应偏差留更大的宽容度。
2)制动级位与制动效果(如列车减速度)映射关系
这个映射关系会发生改变,特别是列车气制动启用时。如图4 所示,ATO 发出恒定的减速度申请(恒定制动级位),列车实际响应的减速度在低速电制动-空气制动转换过程中,会出现更大的偏移。列车响应减速度曲线在夏季会向变小的方向偏移,在冬季会向变大的方向偏移。
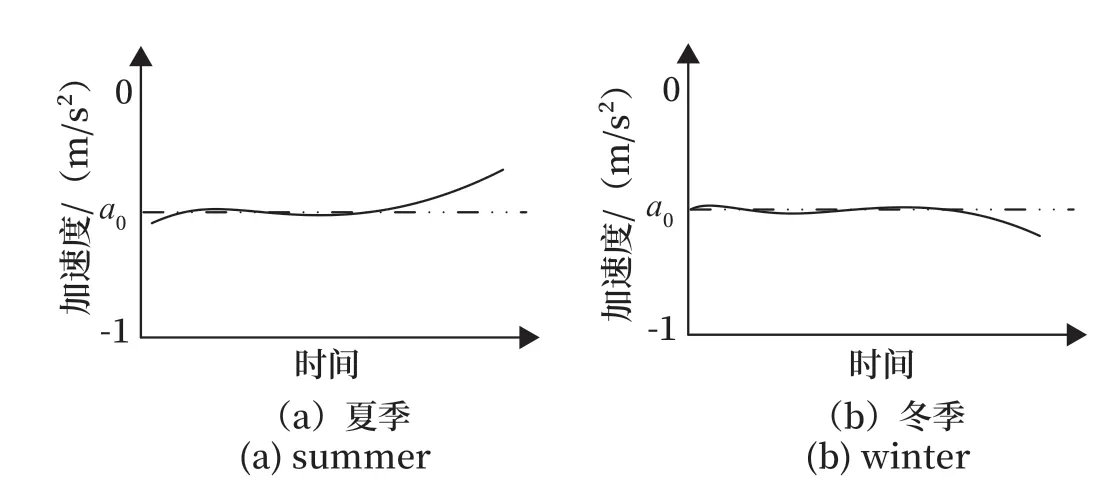
图4 加速度-制动级位映射示意1Fig.4 Acceleration-brake level mapping (1)
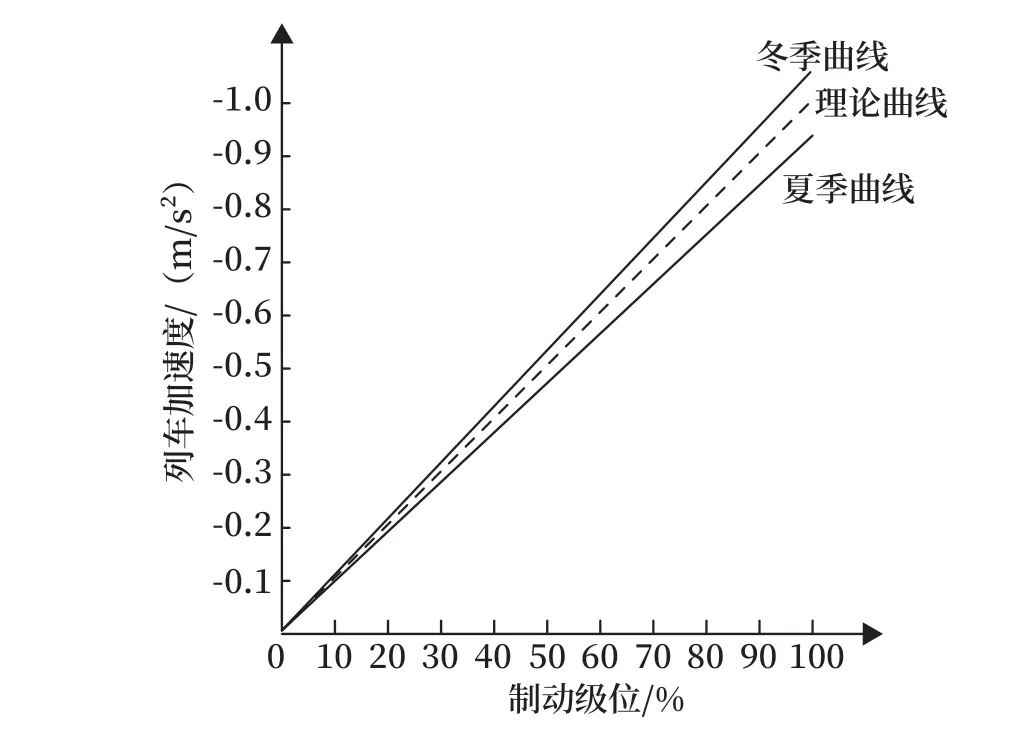
图5 加速度-制动级位映射示意2Fig.5 Acceleration-brake level mapping (2)
因此在车辆制动性能周期性变化范围过大时,只用一条停车减速度-制动级位理想曲线不能完全调和夏季与冬季的需求,结果是ATO 停车精度也出现偏移。
为了消除偏移造成的影响,可以调整级位与制动减速度的映射关系。
同样以夏季、冬季为例,可选用如5 图所示中两种不同的停车度速度-制动级位对应关系。在夏季曲线中,相比ATO 模型计算出的理论曲线,为了获得同等的减速度,ATO 系统将给车辆TCMS网络发送相对更大的级位,对列车施加相对更大的制动力,减少因制动力衰减而造成停车过标的情况;冬季曲线则相反,相比ATO 模型计算出的理论曲线,获取同样的减速度对应更小的级位,即ATO系统给车辆TCMS 网络发送相对更小的级位,使列车施加相对更小的制动力,抵消制动力过大的效果影响,减少停车欠标的情况。
此种方法可在夏季时进行制动力的正向补偿,改善制动力的衰减状况;在冬季时进行级位的负向补偿,改善制动力的过度施加状况。
3)ATO 模型中停车位置的微调
对于已经执行了较好停车策略优化的控车策略,ATO 停车效果上已趋近于某一精度,而此精度与停车“零点”未完全重合,如图6 所示。
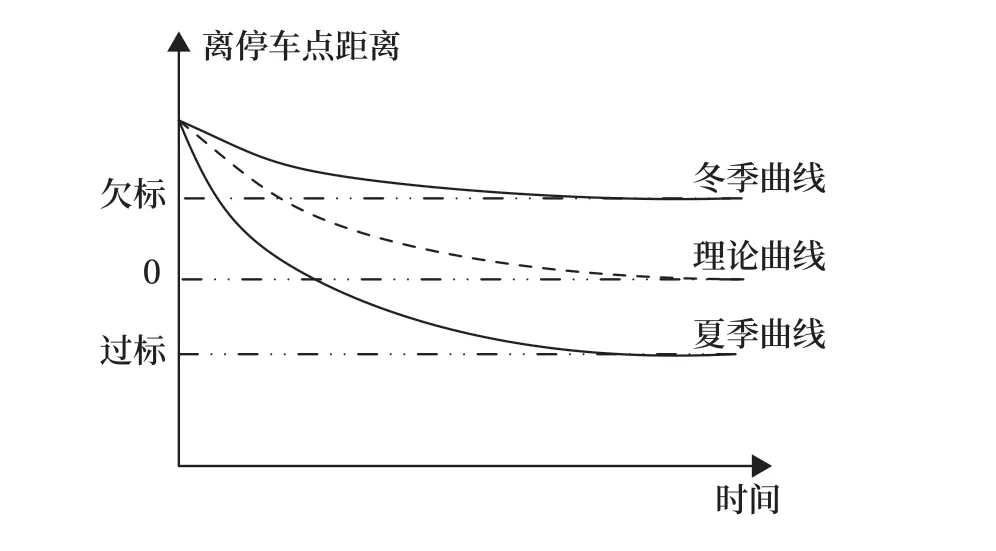
图6 实际停车精度与ATO模型精度偏差示意Fig.6 Schematic diagram of deviation between actual stop accuracy and ATO model accuracy
由于距离停车“零点”十分接近,已不宜再对停车策略作大幅度调整。此时可以采用将模型中虚拟停车位置向真实停车位置“贴合”,如图7 所示,将夏季ATO 模型停车曲线向坐标正方向调节;将冬季ATO 模型停车曲线向坐标负方向调节,以接近停车“零点”。
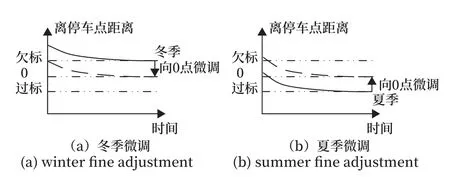
图7 冬、夏季向两个方向微调的示意Fig.7 Schematic diagram of fine adjustment in two directions in winter and summer
3 结束语
本文结合某些地铁线路中ATO 停车精度季节性变化的实际情况,阐述了一种用于补偿地铁列车制动系统响应偏差的方法。总体来说此种方法有着两个着重点。
第一点为适用场景:此种方法主要适用具有一定规律的ATO 停车精度变化的场景,较为常见的场景为季节性变化;同样也可作其他场景的适配,适合更多其他可细分的条件、逻辑,或以强制性的外部输入为条件来作为触发条件。
第二点为策略组所包含子策略的选择:本文主要探讨了3 种在实践中较为常见的调节方向,而且这3 个子策略所包含组合在调节的次序上有一定的层次与互补性,也具有相当的通用性。
