远岸大型水中钢壳沉井下沉定位测量控制
2024-01-29解光路贺志中
解光路,贺志中
(中交第二航务工程局第四工程有限公司,安徽 芜湖 241000)
0 引 言
常泰长江大桥位于泰州大桥与江阴大桥之间,距泰州大桥约28.5 km,距江阴大桥约30.2 km。大桥集高速公路、普通公路、城际铁路“三位一体”合并过江,上层桥面布置双向6车道高速公路,下层桥面上游侧布置城际铁路,下游侧布置4车道普通公路,主航道桥为双塔斜拉桥,主跨1 176 m,孔跨(142+490+1 176+490+142)m,全长2 440 m。桥型布置如图1所示。
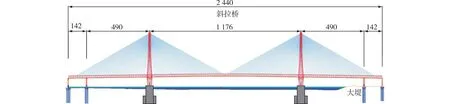
图1 主航道桥布置图
5#墩主塔采用钢沉井基础,平面呈圆端型,立面为台阶型,底面尺寸95.0 m×57.8 m(横桥向×纵桥向),圆端半径28.9 m,沉井顶高程-1.0 m,底高程-65.0 m,总高64 m,首节沉井制造高度43 m。沉井基础结构如图2所示。
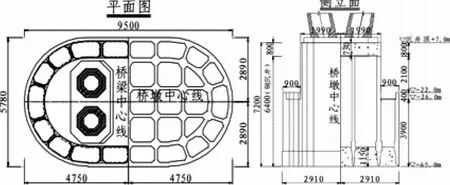
图2 沉井基础结构图
1 施工测量难点[1]
(1)沉井体积庞大,下沉姿态控制难度大。沉井面积相当于13个标准篮球场大小,首节沉井高度足有14层楼高,将如此庞大的钢结构竖直、平稳、准确终沉到位,控制难度极大。
(2)沉井下沉定位精度要求高。为确保沉井最终能竖直、平稳、准确下沉到位,首节钢沉井着床时的姿态偏位控制至关重要,高精度着床可有效避免后续接高以及取土下沉过程中人为调整倾斜来修正沉井姿态,以满足沉井终沉定位精度的要求。为此设计单位结合现有工程技术及控制经验,将沉井定位着床精度在规范要求的基础上进一步提高,以保证沉井终沉定位精度。定位精度如表1所示。
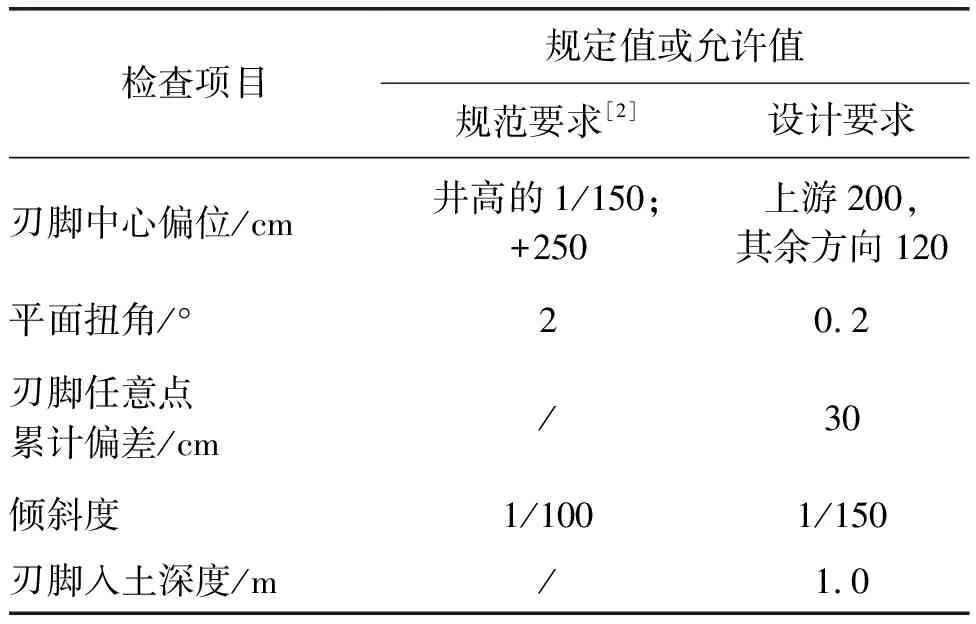
表1 首节沉井下沉定位精度要求
(3)离岸远,监测困难。5#墩位于长江主航道旁,作业区域距岸1.3 km,传统测量方法无法满足施工需求。使用GNSS RTK动态测量技术,在稳定性上有所降低,这对姿态控制有所不利。
(4)航道繁忙,水流湍急,不利于沉井姿态稳定[3]。作业区域附近大型船舶来往频繁,在下沉定位期间,加剧了沉井随波浪摆动的晃动幅度,影响沉井姿态稳定,致使沉井着床精度难以控制。
(5)深水作业,水文情况复杂。5#墩沉井区域水深约26 m,航道内船舶来往频繁,区域内流速、流向和流量等水文情况变化不定,加大了沉井准确定位的难度。
2 施工方案
首节钢沉井在制造基地整体组拼尺寸验收合格完成后,通过水路,利用拖轮浮运至施工现场,采用锚墩+锚缆+海军锚的锚缆系统对沉井进行稳固定位。利用锚缆系统和向隔舱内注水,增加沉井自重来完成沉井姿态调整及下沉[4]。定位锚固系统如图3所示。
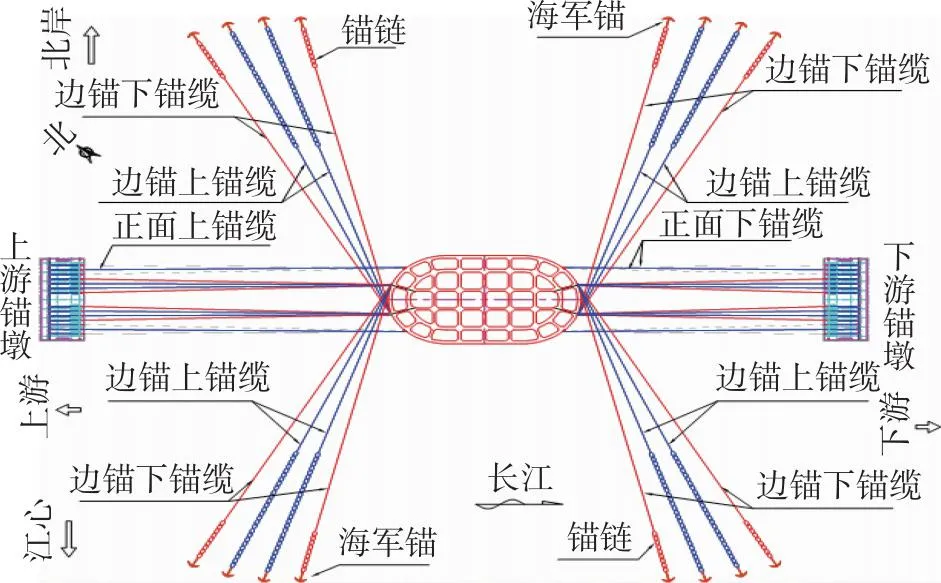
图3 沉井定位锚固系统
3 测量方案
3.1 监测方法
5#墩施工区域距岸边较远,无法利于全站仪进行观测,为保证姿态监测连续性和快速反馈,结合GNSS RTK动态测量技术,采用自动化监测系统,但是自动化监测系统采集的数据无法自动屏蔽因卫星信号差、周跳以及接收机安装引起的误差较大的数据,导致在某个时刻采用误差较大的数据计算沉井姿态导致实际姿态出现偏差。故需要间隔一定周期采用人工进行姿态监测,相对于自动监测,人工测量可直接在沉井轴线监测点上进行测量,减少支架安装误差。同时在GNSS卫星信号失锁,数据链断开时,测量人员可手动进行干预和剔除误差较大的数据,并通过增加观测时间或重新测量来删除突兀、周跳等误差较大数据,以提高观测数据的精度,保证沉井姿态准确。
人工监测存在安全风险高、测量周期长、数据整理慢、信息反馈滞后以及不能实时掌握沉井姿态等诸多不便。因此,结合两种监测手段的利与弊,在测量精度要求较宽松和沉井晃动幅度较大的下沉初期,以自动监测系统为主。在沉井距河床面2 m左右的下沉后期,当沉井晃动幅度较小时,以自动监测系统为判断趋势,以人工监测数据为依据,结合自动化监测系统,相互比对,最终以第三方测量单位测量的数据为沉井着床定位的最终精度。
3.1.1 自动监测系统
在岸边建立连续运行基准站,将流动站固定在沉井顶面,实时数据采集,通过通信网络实时将观测数据发送至后台数据库,进行处理和分析,并通过监控系统平台将实时姿态显示出来。自动监测系统架构如图4所示。
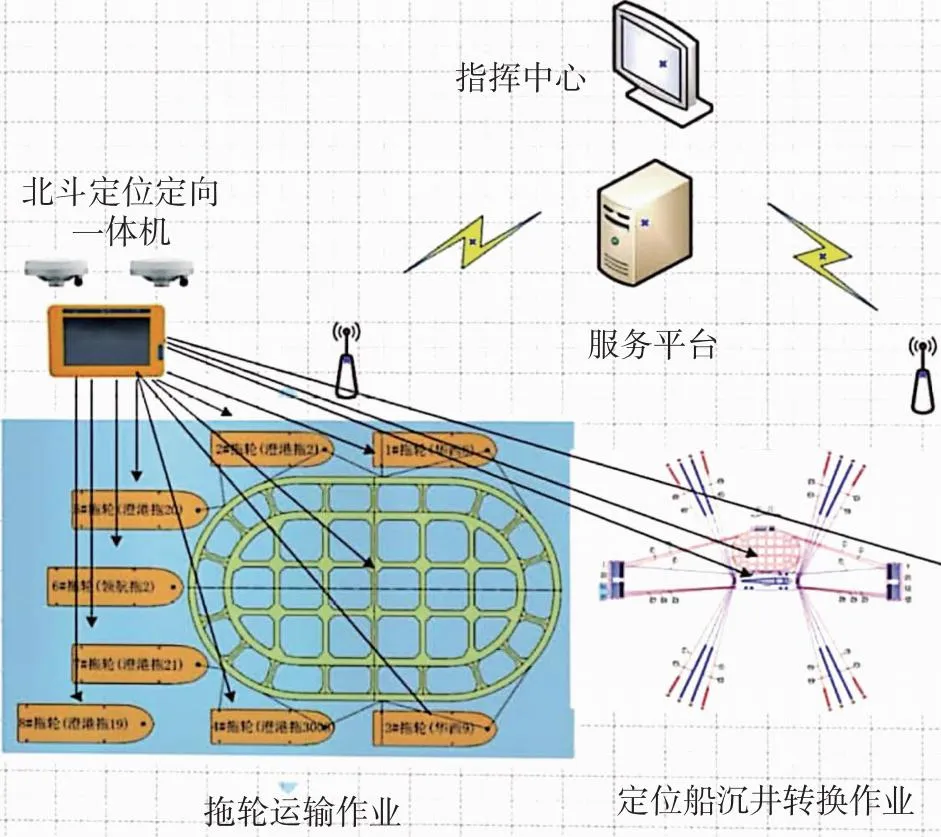
图4 监测系统架构图
指挥中心根据监控系统实时、快速得到沉井姿态数据,指挥施工人员对沉井姿态进行快速调整。
3.1.2 人工监测
即采用传统的基站架设方法,在岸上架设基准站,在沉井下沉过程中由4名测量人员手持GNSS流动站直接到沉井顶面对各监测点进行同步测量,并以此数据计算沉井姿态。
3.2 监测点布设
首节钢沉井在制造基地整体组拼完成后,对沉井顶面实际尺寸进行校核,并以实际尺寸为计算依据,采用全站仪对沉井顶口轴线监测点进行测量放样,监测点布设如图5所示。
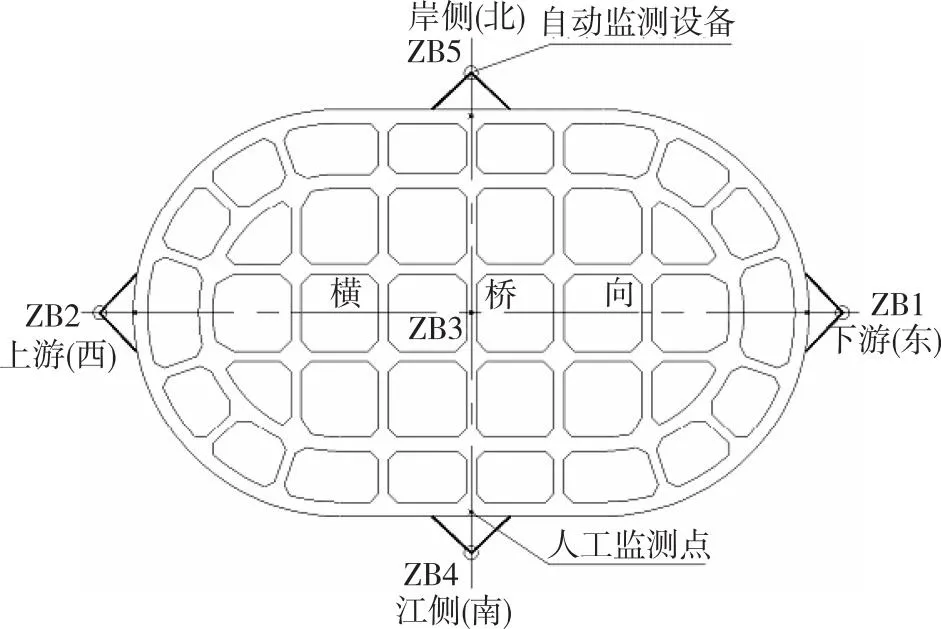
图5 沉井顶面监测点布置图
3.2.1 人工测量监测点布设
人工监测点以放样完成的十字轴线点为监测标记。为便于安置仪器和长期保存,将监测点沿轴线方向向内收缩15 cm,沉井中心点(ZB3)为虚拟点位,采用其余4个监测点数据的平均值作为计算依据。
3.2.2 自动监测设备安装
自动监测点位置需要长期固定安装仪器,若直接安装在轴线监测点上,将阻碍人工测量。由于沉井隔舱顶面为施工通道,人员流动大,照明线路、监控线路等电缆管线较多,为便于监测设备安装保护,故将自动监测点布设沿沉井顶口十字轴线延长线上向外延伸50 cm位置,将支架底部与钢沉井外壁焊接牢固,支架高于防护栏杆50 cm以上,以避免对GNSS接收信号的影响,监测设备安装如图6所示。
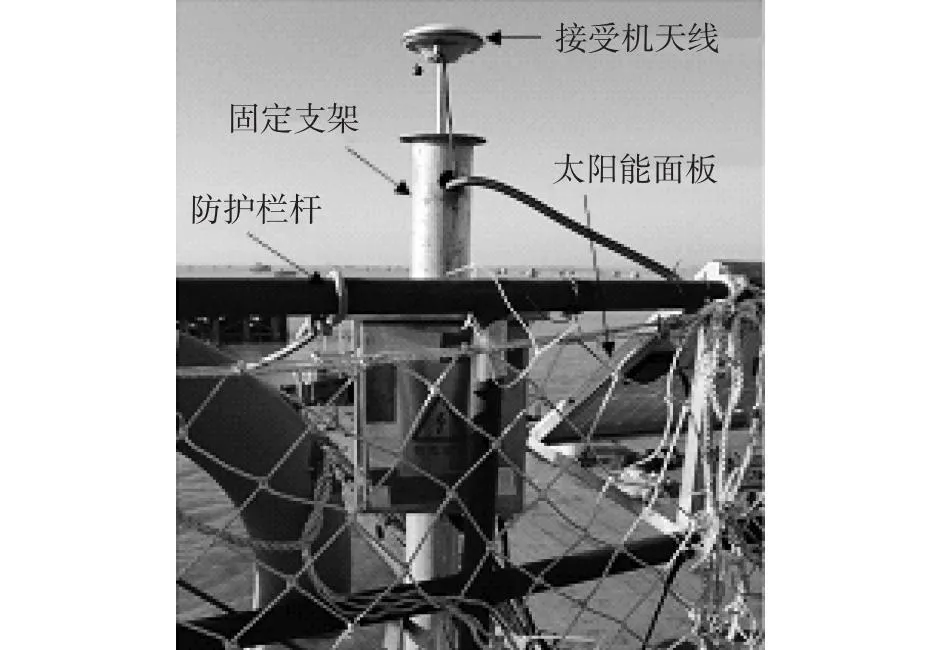
图6 自动监测流动站安装图
由于自动监测设备竖向固定支架在加工和安装时存在误差,焊接时,竖向支架难以保证绝对竖直,致使GSNN接收机天线中心与沉井轴线不重合,以及自动监测点与人工监测点之间存在距离差,导致两套监测数据无法统一,针对此类较差,在支架安装后,沉井处于相对稳定状态时,采用全站仪测量出自动监测点及人工监测点之间的坐标数据差值,通过两套数据较差来修正自动监测数据,使自动监测系统显示的坐标直接为人工监测点位置的数据。修正工作需反复进行,以确保两套数据的一致性。
3.3 基准站设置
结合现场实际、操作便利性、设备安全性及连续作业等情况,将自动监测基准站和人工监测基准站设置在不同的测量控制点上,以达到两种测量手段之间测量数据的相互比对,确保沉井姿态准确。
3.3.1 人工监测基站设置
为便于连续作业,将基站设在项目驻地内,接入220 V家用电源,并备有蓄电池预防断电,确保基站电源连续不断。同时为避免驻地房屋对基站信号影响,在基站建设时,抬高基站基础高度,基站设置如图7(a)所示。
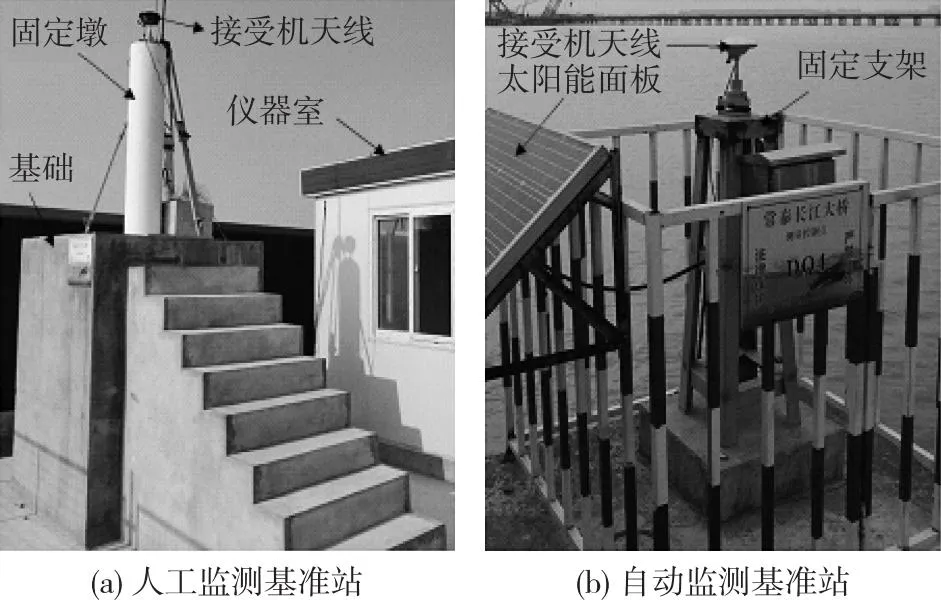
图7 基准站设置
3.3.2 自动监测参考站设置
为保证数据的可靠性,将参考站设在另一基点上,电源采用太阳能面板发电,并备有充电电池,以确保参考站连续运转,基站设置如图7(b)所示。
沉井下沉定位施工前,应将各基站点纳入到施工控制网中,进行整体组网观测平差,确保基站点数据与交桩数据坐标系统的一致。
4 主要仪器配置
在整个首节钢沉井下沉定位期间,自动监测系统需要固定仪器设备,而人工监测时,为消除每个监测点上测量时间的差异对姿态的影响,采用4台GNSS接收机同步进行数据采集,时间上精确到秒,主要仪器配置如表2所示。

表2 姿态监测设备配置表
5 结 语
沉井下沉定位初期,沉井姿态受水流等环境因素影响,变化幅度较大,在下沉过程中,采取边注水边纠偏的调整方案下沉,随着注水量的增加,高程的下降,姿态变化相对稳定。在精确调整时,应严格控制沉井姿态,并对隔舱进行快速注水,使沉井刃脚快速入泥,逐渐达到下沉目标。最终,通过第三方测量单位精确测量沉井的定位精度为刃脚中心偏位13.4 cm,倾斜度为横桥向1/3 026、纵桥向1/4 984,平面扭转角为0.015°,定位精度优于现行规范及设计规定的要求。
针对沉井定位测量控制难点,通过制定合理的调整方案、定位系统及控制措施,利用两种测量手段相结合,在精度上可以满足施工需求,在下沉施工及姿态控制过程中应注意以下几方面。
(1)要有稳定可靠的定位锚固系统,以确保对沉井姿态的稳定控制,便于对沉井姿态的及时调整和纠偏,做到收放自如。
(2)河床面高低起伏越大,越难以控制沉井中心偏位和姿态。下沉前应对原河床面进行扫测,提前了解河床面平整性,制定应对措施,必要时进行预偏设置。
(3)掌握沉井区域内潮位、流速、流量、流向和波浪等水文数据,分析对沉井定位影响的大小,便于选择在合理的时机下进行沉井下沉定位施工。
(4)沉井注水下沉期间,应保证每个隔舱对称均匀注水,减小不均匀注水对沉井姿态的影响。精调后,进入快速注水着床期间,一次注水量要予以保障,以确保沉井在最短时间内完成着床定位,减小水流和流向变化对沉井姿态产生的影响。
(5)下沉期间,沉井处于动态半悬浮状态,人工监测时,无法同步完成所有点位测量,应采用4台GNSS接收机同步监测,以消除各点测量时间上的差异造成沉井姿态的失真。
在沉井下沉定位着床施工期间,测量工作至关重要,选择合理的测量方法将直接决定沉井下沉定位精度能否满足规范设计要求,在制定监测方法时要确保方法可用,精度可控。
