无人机载低成本北斗/GPS实时定位精度分析
2024-01-29周游
周 游
(河海大学地球科学与工程学院,江苏 南京 211100)
0 引 言
在2020年7月31日,北斗三号全球卫星导航系统正式开通,提供全球定位、导航和授时服务[1]。北斗和GPS的组合定位模式成为发展趋势之一。国内外学者在组合单点定位方面取得了丰富的研究成果[2-3]。例如,徐宗秋等针对复杂环境下GPS单系统精密单点定位性能较差甚至无法定位问题,研究利用GPS及北斗组合进一步提升U方向的定位性能[4]。闫飞等采用多星座模块,建立北斗/GPS组合定位算法,与单GPS定位结果进行对比分析,得到北斗/GPS组合定位在X、Y、Z方向的实际精度分别为±3.112 m、±3.542 m、±4.073 m,单GPS定位结果分别为4.946 m、5.254 m、7.274 m[5]。
无人机机动灵活易操作,信息传递快捷,在测绘、农业、建筑等领域的应用越来越广泛。本文基于小型无人机搭载低成本北斗/GPS芯片,设计并实现软硬件系统。通过实时回传的观测数据,采用GPS、北斗以及北斗/GPS组合3种定位模式,进行实时单点定位,并对各模式下的可见卫星数、空间几何精度衰减因子PDOP和定位精度进行分析与评估。
1 绝对单点定位的基本原理
低成本北斗/GPS模块采用绝对单点定位原理[6],定位是通过测量卫星与接收机之间的距离来实现的,不可避免地包含着两台钟不同步的误差和电离层、对流层延迟误差等,测量出的距离并不是卫星与接受机之间的实际距离,所以称之为伪距[7]。伪距绝对单点定位速度快,无多值性问题,数据处理简捷,无须进行复杂的处理步骤,就能提供相对可靠的定位,适合对定位精度要求不是特别高的应用场景,其迅速定位和简洁数据处理的特点适用于无人机载低成本北斗/GPS模块定位。
伪距观测方程可以表示为:
(1)

2 系统实现
系统包括搭载低成本北斗/GPS模块、通信模块的无人机硬件系统,以及串口接收调试、数据解码计算的软件系统。目的是在无人机飞行过程中,利用北斗/GPS模块获取无人机位置信息,利用无线通信模块将数据实时回传到电脑端,并进行定位结果的评估与分析。
2.1 硬件设计与实现
单片机控制北斗/GPS定位模块,采集定位数据后,由通信模块发送给云平台。使用串口虚拟软件将云平台服务器映射成电脑端虚拟串口,上位机直接调用该虚拟串口实现数据的传输,并将数据在上位机实时显示。北斗卫星、无人机、定位芯片、通信模块、云平台及电脑端的拓扑关系如图1所示。

图1 无人机低成本北斗/GPS定位模块拓扑关系
硬件设计的基本思想是构建搭载低成本北斗/GPS实时定位和无线通信模块的无人机系统。系统以单片机为核心,锂电池组供电,北斗/GPS双模导航定位模块实现卫星信号的采集与显示,无线通信模块建立与云平台之间的通讯,传输数据,按键模块对单片机控制,实现开启或关闭数据的传输,方便使用与调试。系统总体结构关系如图2所示。

图2 系统总体结构关系图
控制系统的主控芯片、各种传感器和定位模块选型非常重要,考虑到主控芯片价格、功耗、数据处理能力等,采用STM32F系列中的STM32F103单片机。定位模块考虑了价格、定位精度、功耗等因素,采用高性能ATK-1218-BD北斗/GPS定位模块。该定位模块体积小巧,性能优异,且模块自带可充电后备电池,可以掉电保持星历数据,采用NMEA-0183协议输出GPS/北斗定位数据,支持GPS或北斗单系统,以及北斗/GPS双系统等多种定位模式。通信模块ATK-M750是一款高性能、排针小巧的全网通信产品,其优点是高速率、低延迟,支持多种协议的无线数据传输。将定位模块、通信模块和电源模块与单片机连接,集成无人机低成本北斗/GPS定位系统,如图3所示。

图3 无人机低成本北斗/GPS定位硬件系统设计与实现
2.2 软件实现
为了实现无人机数据实时回传和动态定位,软件系统设计与实现的核心是各模块串口及其映射、定位模块数据解码计算,通信模块集成,并将软件系统生成的hex文件烧录至单片机[8]。
定位模块捕获北斗/GPS卫星信号并进行信号初始化,通过USMART输入数据流获取函数,函数通过SYSTEM文件夹默认的串口接收来实现输入数据流获取。当接收到0X0D时,计数器将不再增加,等待0X0A的到来,若没有接收到0X0A,则认为本次接收失败,重新开始下一次接收。北斗/GPS接收数据处理流程如图4所示。

图4 北斗/GPS数据接收流程图
数据传输基于虚拟串口映射软件。设计了串口调试软件及系统,如图5所示。系统获取北斗/GPS定位模块和通信模块提供的位置信息,向操作者反馈,并在上位机实时显示,上位机对无人机平台传回的信息进行解译,将位置信息呈现在地图上,如图6所示。

图5 串口软件图

图6 位置信息输出
3 定位实验与精度分析
软硬件系统构建完成后,进行定位实验与精度分析。实验采用RTK结果作为参考值,对GPS、北斗、及北斗/GPS组合定位3种模式进行绝对单点定位[9-11]。分别分析各模式下可见卫星颗数、空间几何强度因子和定位精度,最后比较定位结果在东(E)、北(N)、天(U)方向上与参考值的偏差。
3.1 实验数据
无人机工作时采集北斗与GPS观测数据,将数据通过通信模块发送给云平台,使用串口虚拟软件将云平台服务器映射成电脑端虚拟串口,上位机直接调用该虚拟串口实现数据的双向传输,并将数据实时显示在显示屏上。在外业观测阶段,北斗/GPS模块蓝色灯光开始闪烁后,进行云平台设置、建立虚拟串口,和通讯输出检核。
(1)设置云平台
登录原子云平台,使用账号和密码登录,新建设备,记录设备的编号以备后续使用,如图7所示。

图7 云平台虚拟成串口通讯图
(2)建立虚拟串口
调用串口虚拟软件,软件的主要功能是将云服务器映射成电脑端虚拟串口,实现与网络数据之间的通讯,电脑端可以直接调用软件虚拟出来的串口,以实现双向数据传输。虚拟串口的建立分为,添加串口、选择创建的虚拟串口端口号、网络参数配置,原理如图8所示。
(3)通讯输出检核
打开串口助手软件,选择相应的串口和波特率,打开串口,若显示区域正常显示传回的定位信息,系统输出正常。其次,进行通讯检核,分别在消息收发界面和串口助手发送框发送命令或数据,根据设备的响应和返回的数据,判断通讯是否成功。若成功接收到数据并且数据与预期一致,则表示通讯成功,后续打开串口开始数据采集,如图9和图10所示。

图9 上位机和串口通讯图

图10 实验数据采集图
3.2 几何构型分析
定位性能与卫星数量、位置、方向以及卫星空间几何构型有较强相关性,更多的可见卫星通常可以提供更好的定位精度[12]。可见卫星数量反映模块所在位置的可见卫星数,天空图提供卫星在天空中的位置和方向,精度衰减因子PDOP衡量卫星分布对定位精度的影响,PDOP值越小,卫星空间几何构型越优[13]。图11、图12分别给出了在GPS、北斗、北斗/GPS 3种模式下的天空图、可见卫星数和PDOP值。

图11 基于GPS、北斗、北斗/GPS的天空图
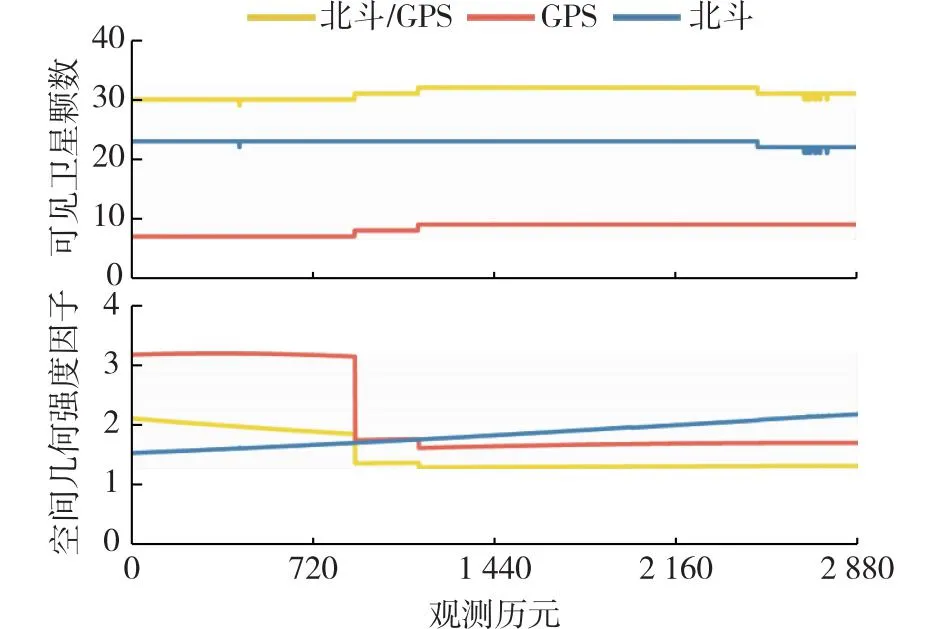
图12 基于GPS、北斗、北斗/GPS的卫星数量、PDOP结果
北斗/GPS组合定位模式,大大增加了可见卫星颗数,历元利用率提高。例如,在第480历元下,单GPS只有8颗卫星,单北斗有24颗卫星,而北斗/GPS组合后,卫星数提高到了32颗,增加了33.3%。在卫星空间几何构型方面,GPS平均PDOP值为1.8,北斗平均PDOP值为2.0,北斗/GPS组合时的PDOP值为1.4,降低了30.0%。
3.3 精度分析
实验通过定位模块,实现GPS、北斗和北斗/GPS组合定位3种模式单点定位,数据采集间隔为1 s。原始数据流经定位模块解码、计算后,得到北斗/GPS组合定位结果,如表1所示。

表1 北斗/GPS模块定位结果(平面单位/°,高程单位/m)
低成本北斗/GPS定位模块数据的精度评估[14-15]方法如下:统计水平和垂直定位误差,其中水平定位分量Δhj计算方法为:
(2)
垂直误差分量Δuj计算方法为:
(3)

选取两个2 h定位为例,将北斗/GPS定位结果与RTK获取的坐标进行比较,东(E)、北(N)、天(U)方向上偏差由图13表示。结果表明:在E、N、U方向上的平均定位偏差为2.5 m、4.1 m和2.4 m。

图13 定位收敛特性图
4 结 语
为实现无人机实时巡检、导航等功能,利用低成本北斗/GPS定位模块,设计和实现了无人机硬件和软件系统。使用北斗/GPS模块进行GPS、北斗和北斗/GPS组合定位3种模式的定位实验,对比分析了各模式下可见卫星数、空间几何精度衰减因子和定位精度,得到以下主要结论。
(1)建立了定位模块、通信模块等硬件系统间的拓扑关系,确定了单片机、定位和通信等主要模块的具体型号,通过软件烧录方式,将软件系统与硬件系统集成,实现了无人机低成本定位系统。
(2)通过可见卫星数、精度衰减因子等指标,对比分析了GPS、北斗以及北斗/GPS 3种定位模式下,卫星观测的几何构型。双系统模式下,可见卫星数提高30%以上,进一步解释了双系统定位精度优于单系统。
(3)与RTK结果比较发现,低成本双系统定位精度在E、N、U方向上的偏差分别为2.5 m、4.1 m和2.4 m,可以满足无人机实时巡检、导航等低精度应用。
