微电网控制自动化研究
2024-01-27隋俊珉
隋俊珉
(国网山东省电力公司烟台市长岛供电公司,山东 烟台 265800)
在工业新技术的影响下,现代电力系统正在迅速转型,分布式发电发挥了越来越重要的作用。除了使用基于可再生能源的分布式发电机组外,在部分特殊气候条件下,分布式发电主要使用基于有机燃料燃料的小型热电联产机组(例如燃气轮机、蒸汽轮机、燃气活塞等)发电[1-2]。
当低功率的分布式发电系统连接到大型集中式电网时,会出现危险的异步模式。在这种情况下不能保证这些系统并联运行的动态稳定性,会导致带有同步发电机的低功率发电装置出现故障。由此可见,低功率微电网与电网外部网络的发电并联运行连接方式的所有特征都是相互集成的技术障碍,制定方案并解决这些问题是一项重要且十分必要的任务。
1 微电网自动化实施分析
微电网是由分布式能源资源、负荷和能量存储系统组成的小型能源系统,具有一定的独立性和自治性。为了实现微电网的稳定运行和优化能量管理,控制自动化是至关重要的。微电网控制自动化分析涉及多个方面,包括控制策略、通信网络、智能技术以及安全性等[3-5]。首先,微电网的控制策略是确保其稳定运行的核心。传统的电力系统控制方法难以适用于微电网,因为它涉及多种能源资源和负荷的协调管理。因此,先进的控制策略(例如分布式能源管理系统(DERMS)和虚拟电厂(VPP))应运而生。这些策略运用实时数据和预测算法对微电网内各种能源设备进行优化控制,以确保供需平衡和系统稳定。其次,通信网络在微电网控制中起到了关键作用,包括数据采集和监控。需要监测微电网中的各种组件,例如太阳能光伏板、风力发电机、能量存储系统和负载的状态和性能。通过通信网络传输这些数据,使运营者可以实时监控微电网的运行状况,检测问题并采取必要的措施。在通信网络中,运营者可以远程操作和控制微电网中的各种设备,例如调整发电机的输出、切换负载连接以及控制能量存储系统的充/放电等。此外,微电网的控制自动化还需要考虑安全性和鲁棒性。由于微电网涉及能源系统,因此系统的安全性尤为重要。采用安全加密通信、访问控制和网络监测等方法可以防止恶意攻击和数据泄露。随着能源技术不断发展,微电网控制自动化将不断创新,保证能源系统稳定运行。
2 网络连接及控制方法
2.1 分散式发电装置与外部电力网络连接
微电网系统作为通用电网的一部分并行运行具有优势,但也存在技术方面的风险和障碍。系统的机电兼容性较差,大型发电机组与小型发电厂的发电机差异较大。当小功率发电的微电网连接到大型集中电网时,会出现危险的异步模式。在这种情况下,系统的并联运行不能保证其动态稳定性,从而导致小功率发电装置及其同步发电机失效。动态时刻也出现在机轴短路时刻或短路后,断开了现有的继电器网络保护。
2.2 在线识别-递归识别控制
控制过程可以通过递推辨识算法得到过程模型的参数估计(可以在控制器的设计工作中使用相关数据),假设这些估计值与它们的实际值对应。模型参数的递归或在线确定是自适应控制的关键,它允许跟踪这种类型的控制变量参数,从而使系统模型在每次获得新的测量值时随着采样时间不断更新,控制器可以适应被控制的过程的新特性,并且在过程动力学中有变化的情况下再次进行调整。
在自适应控制算法的在线估计中,使用了二阶ARX(自回归遗传)模,该模型含递归最小二乘法。该系统可用传递函数描述,如公式(1)所示。
式中:G(z)为系统传递函数;B为输出矩阵;A为输入矩阵;a、b分别为相应元素;z为传递函数变量;n为变量的指数;d为变量的固定指数。
过程的估计输出是根据以前的过程输入u、输出y以及公式(1)计算的,如公式(2)所示。
矢量形式如公式(3)~公式(5)所示。
式中:θT(k-1)为估计参数向量;ϕ(k)为回归向量;、分别为输入、输出的元素向量形式;T为转置符号。
具有自适应定向遗忘的最小二乘法分析如下:自适应方向遗忘可以进一步改进指数遗忘法,使遗忘系数随输入、输出信号的变化而变化。使用递归方程更新流程参数如公式(6)所示。
式中:ξ为递归方程系数,ξ=ϕT(k)P(k-1)ϕ(k);P(k-1)为协方差矩阵第k-1个元素;y(k)为输出变量。
协方差矩阵P在每个步骤中都会更新,如公式(7)所示。
式中:ε为协方差矩阵系数,;k为协方差矩阵的元素。
遗忘系数β更新如公式(8)所示。
式中:ρ为遗忘系数的变量;η、v为计算过程中的变量函数。
计算过程中的变量函数v如公式(9)所示。
计算过程中的变量函数η如公式(10)所示。
计算过程中的变量函数λ如公式(11)所示。
3 自动化技术实施与测试
自动化设计可以对低功率系统进行全自动控制,在正常和紧急模式下,根据有功和无功功率同步低功率发电,可以选择操作设备的组成和操作选项,自主或与外部电网并联。实际微电网相关的硬件主要方案如图1所示,该硬件通过内部10 kV网络的中间配电点连接到电力系统的外部电网。

图1 微电网与外部电网同步运行模式的主要方案
为了研究微电网自动化控制方法,测试控制算法和相应的软硬件综合体自动装置,该文开发了微电网模式物理建模实用建议系统,并创建了本地供电系统的物理模型。在已有电力系统监控模式测试设备中心的电动模型(EDM)的基础上,对物理过程进行建模,对自动化子系统进行测试。
微电网的物理模型包括发电厂(G)、分段母线(T)、断路器(B)、负载(L)、电力线(PL)、变压器(Tr)和计量变压器,还有代表外部大型电网模型的无穷大功率母线。微电网的物理测试方案图如图2所示。
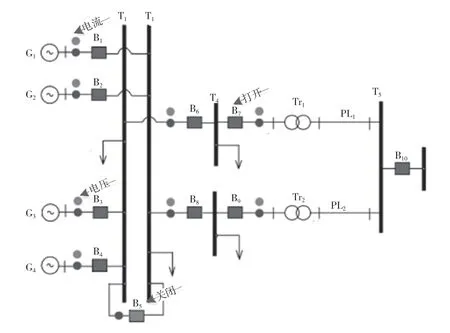
图2 用于测试软硬件复合体的微电网物理模型方案图
该方案图显示了开关的位置。开关用方形表示,圆点表示电流电压的测量位置,切换状态对应B站(G3-G4,T1,H1节点)被取消时A站(G1-G2,T2,H2节点)与外部电网的并联操作。当制定测试方案和进行测试时,决定A站完全由自动化控制,B站由操作人员控制。在自动操作员工作期间,B站的操作人员接收自动操作员的命令,以改变相应的模式。模拟的微电网有2种正常模式,一种是具有组合的自主运行模式,另一种是与具有分开的站总线的外部电网的并联运行模式。
3.1 微电网的隔离运行中接通发电设备的控制
在试验中连接和断开超过运行发电机允许负载的额外负载如图3所示。
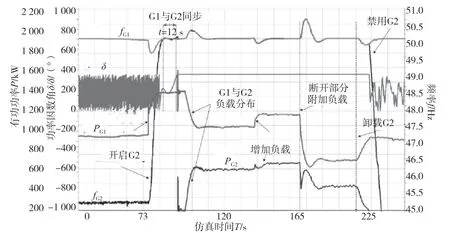
图3 在微电网隔离运行模式中,自动控制接通的发电设备组成时的过程示意图
波形图显示了在自动操作系统的控制下启动和同步发电机的过程(在30 s内执行),卸载发电机并将其转移到准备启动模式(在20 s内执行)。自动操作系统对设备的控制是无错误的,在瞬态过程的时间和质量方面是有效的。
3.2 微电网指定区段的负载控制和调节区段选择
在试验中,通过网络部分传输的功率的设定值发生了变化。检查外部网络输出功率任务的自动处理以及调节流量的部分的选择如图4所示。由图4可知,在自动操作器控制过程中,截面积增加,即负载增加。在5~10 s的时间段,自动操作控制区段负责在5 s区段内自动选择并提供正确的操作系统区段,以确保紧急平衡划分的准备状态得以维持。

图4 自动控制加载指定网络段的任务过程以及选择调节流量的示意图
4 结语
该文针对微电网与外部电网并联运行模式提出了一种新的科学控制概念,既能保证微电网低功率发电和外部电网的安全运行,又能采用新的技术。为了保障外部电网的安全运行,采用分散自动模式和应急控制,该研究所获得的结果是通过使用软件和电网物理模型的数值研究进行测试的,并且也是作为实际控制设备的原型实现的。当以正常模式同步运行的本地供电系统与电网外部网络分离时,最大程度地降低了用户紧急停机的概率,从而提高供电的可靠性。
