无人机数字航摄像控点的自动布设和整饰研究
2024-01-26李林娜严杏娟
牛 群,李 超,李林娜,史 珂,严杏娟,徐 敏
(1.云南交通职业技术学院 公路与建筑工程学院,云南 昆明 650500;2.云南省基础测绘技术中心,云南 昆明 650034;3.西南林业大学 土木工程学院,云南 昆明 650224)
0 引言
近年来,无人机应用领域不断扩展,极大地满足了社会各行各业对高分辨率遥感影像的需求。随着无人机机型不断升级换代,机载供电系统不断改进,滞空时间不断增长,单架次有效航摄面积不断扩大,使采集的数据成倍增加,布设的数字航摄像控点数量也成倍增加。当下,测绘型无人机PPK/RTK新技术被广泛应用,使数字摄影测量空三加密对像控点数量要求大幅减少。
像控点是摄影测量控制加密和测图的基础,满足成果归化到国家大地坐标系下。目前,像控点测量内业以人工操作为主,包括选点和整饰,存在操作繁琐,人工干预多,自动化程度低等问题,且无适用的相关软件。由此,设计开发了一款面向通用Windows平台的自动处理辅助系统。该系统能明显提升自动化水平,提高作业效率。
1 技术路线
通过研究像控点测量内业处理通用技术路线,依据相关国家和行业标准[1-3],参考生产实践经验,不断进行改进优化,总结了一种像控点测量内业处理技术路线,见图1。
2 开发方式
本文使用主流的Windows平台应用程序开发环境Visual Studio,基于WinForm框架,采用C#高级程序设计语言,开发了自动处理辅助系统。
Visual Studio是微软公司推出的一个基本完整的开发工具集,WinForm框架可根据自身需求设计有特色的窗体和可视控件,结合彼此交互性更好的C#编程语言,可在.NET开发平台中创建丰富的基于Windows的应用程序[4]。
3 关键功能实现
3.1 区域网自动布点
无人机数字航摄采用区域网布点,航摄结束后,通常将机载POS和原始影像简易处理制作高分辨率快拼图,作为像控点布设底图,虽地物判读准确,点位选定便捷,但原始数据拷贝和数据处理耗时长。系统仅将POS自动转换为KML地标性文件,无需制作快拼图,与时效性强的在线卫星地图叠加,依据相关国家和行业标准[1-3],考虑数字航摄类型、成图比例尺、辅助定位定姿设备,计算布设参数,确定相邻像控点航向基线和旁向航线跨度等,在固定区域内人工概略选点,生成像控点分布KML文件。
程序读取POS(StreamReader),按照XML语法格式自动转换为KML文件(StreamWriter),关键代码如下:
streamwriter.WriteLine("");
streamwriter.WriteLine("
streamwriter.WriteLine("
…
streamwriter.WriteLine("
streamwriter.WriteLine(" ");
streamwriter.WriteLine("
streamwriter.WriteLine(" ");
streamwriter.WriteLine(" ");
streamwriter.WriteLine(" ");
streamwriter.WriteLine("");
…
streamwriter.Write("");
streamwriter.Close();
在线卫星地图分辨率低,只能进行概略选点,达到避开植被茂密及建筑物和构筑物稀疏区域,满足交通便捷。因此,程序将像控点和像片的地理坐标变换为投影坐标,对每个像控点,遍历所有像片,计算两者间距离,按最邻近规则自动提取最小范围内单张像片,利用原始分辨率单片确认点位。如点位有较大改动,处在单片边缘或不在单片内,需重新进行单片提取,再次确认点位。同时,对于像控点测量外业观测,单片也能辅助技术人员现场判读点位或重新选点。
3.2 外业采集数据自动整理
针对像控点坐标测量,普遍使用省级或千寻CORS网络RTK。依据相关行业标准[6-7],每个像控点观测2次,系统自动读取点位观测原始文件(StreamReader),取中数,对同一分区,按点名数字位升序排列(冒泡排序法[5]),生成点位观测顺序表和像控点成果表(StreamWriter)。
为了便于技术人员空三刺点,现场需拍摄点位远景和近景照片各一张,远景即反映点位与周边特征地物的相对位置关系,近景要求拍摄对中杆杆尖落地处(地面点)或接收机天线座底部(非地面点)。现场照片无需人工更名,系统能自动获取全部的拍摄时间(System.Drawing.Image.FromStream、System.Drawing.Image .PropertyItems),按先后顺序(冒泡排序法[5]),匹配点位观测顺序表,实现现场照片重命名。
3.3 数字刺点片自动制作
数字刺点片能辅助技术人员准确判读点位,便于点位信息存档。初始需人工确定点位,在单片Maximum(300%)比例点击准确位置(PrickPoint),系统便自动添加固定标识和截图范围,并居中显示,进而一键截取相应尺度点位(Intercept Maximum/Intercept Middle/Intercept Minimum),随即顺次多尺度变换到Middle(100%)、Minimum(25%)比例进行截图(见图2),同时链接像控点属性值和成果表,利用iTextSharp.dll(iTextSharp.text、iTextSharp.text.pdf)开源类库自动生成符合相关国家和行业标准[1-2]的PDF格式数字刺点片,见图3。
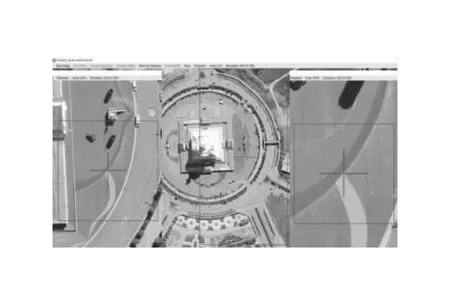
图2 点位多尺度截图Fig.2 Multi-scale screenshot of point position
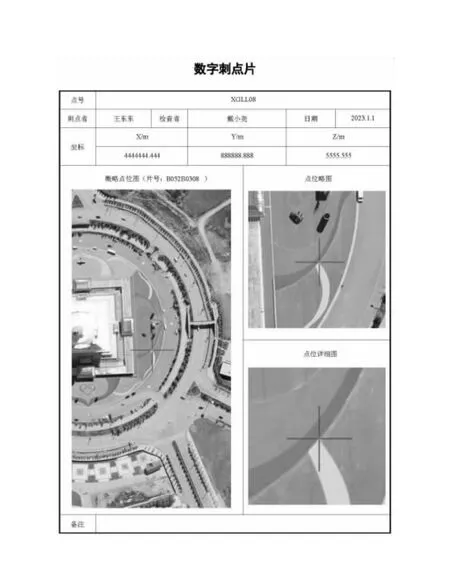
图3 数字刺点片成果Fig.3 Achievement of digital punctate photo
点位多尺度截图尺寸为Maximum(500×500)、Middle(500×500)、Minimum(440×880)。如点位靠近单片边缘,Minimum(25%)比例点位截图会有缺失。此时,截图范围能提供关键参考,辅助确定单片平移量,使点位截图满幅。
4 应用试验
按前述的像控点测量内业处理技术路线和关键功能实现方法,设计了无人机低空遥感影像区域网定向辅助系统,见图4。图中从左至右依次为POS预处理、布设参数计算、点位单片提取、坐标测量数据整理、现场照片重命名和数字刺点片制作,各功能模块操作界面见图5。

图4 无人机低空遥感影像区域网定向辅助系统Fig.4 Oriented auxiliary system for UAV low-altitude remote sensing image in regional network
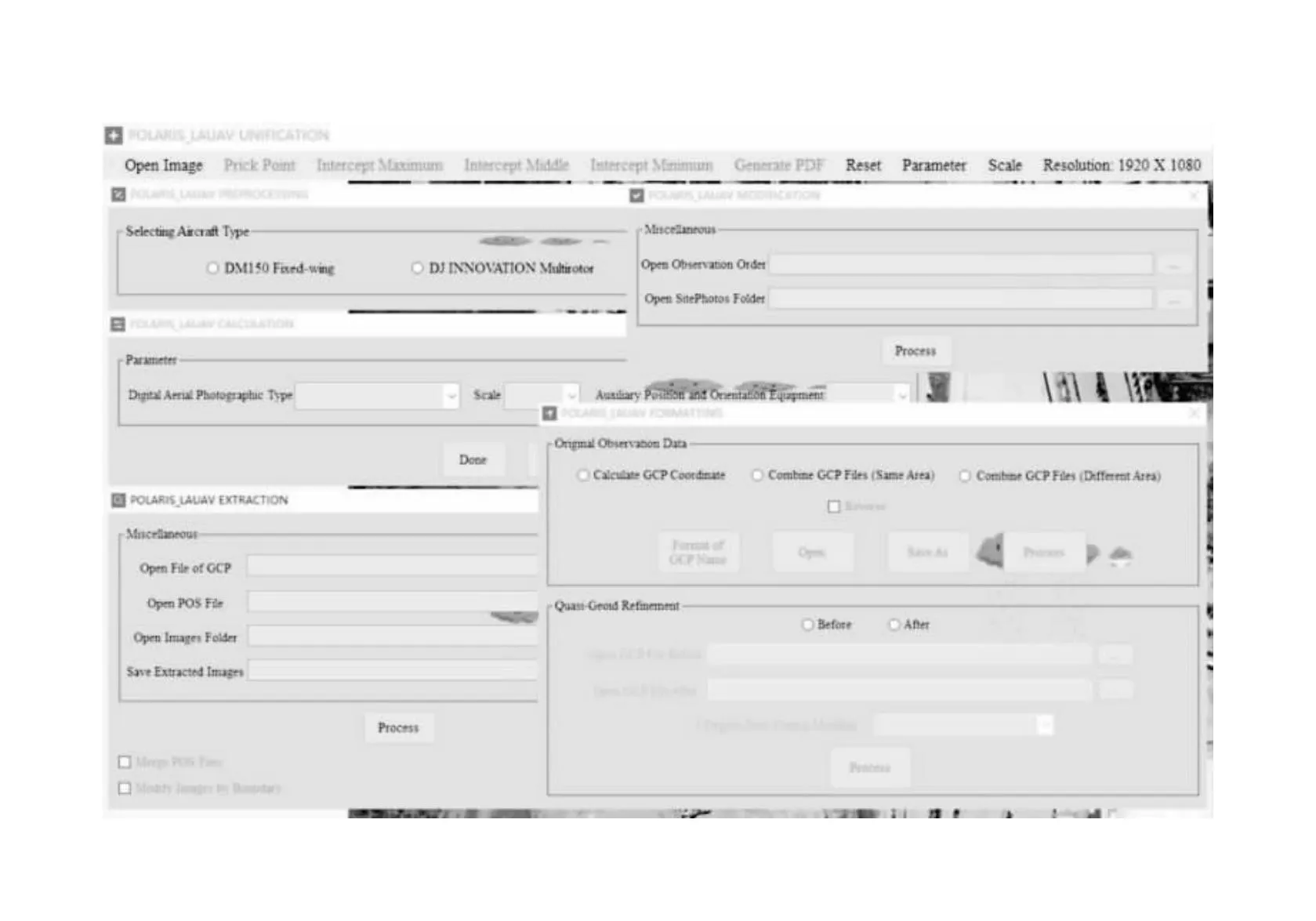
图5 各功能模块操作界面Fig.5 Operation interface of each function modules
系统结合云南省地质灾害隐患识别中心建设滇西三江地区航摄影像获取及正射影像制作项目,项目目标即开展遥感手段的地质灾害隐患识别分析,切实提高云南省地质灾害隐患识别水平和防治科技支撑能力。对2万km2项目区,按功能模块顺次操作,高效完成了像控点测量内业处理。
5 结束语
应用试验验证了系统的有效性,系统达到设计的目标,最大限度地提升了相关操作的自动化水平,尽可能减少用户干预,减少工作冗余,明显降低了对操作人员专业能力和配备数量的要求。系统实现了像控点测量内业处理的规范化和标准化,能高效指导生产,显著提高作业效率,在行业内具有一定的推广意义。
