抗体工程化微型机器人清除水中新型冠状病毒的研究
2024-01-26郑明彬梁锐晶蔡林涛
石 敏 陈 泽 潘 宏 郑明彬,3 梁锐晶 蔡林涛*
1(中国科学院深圳先进技术研究院 深圳 518055)
2(中国科学院大学 北京 100049)3(深圳市第三人民医院 深圳 518112)
1 引 言
由新型冠状病毒(severe acute respiratory syndrome coronavirus 2,SARS-CoV-2)感染引起的新型冠状病毒肺炎(简称“新冠肺炎”)在全球范围内不断蔓延,截至 2023 年 4 月,全球新冠肺炎累计确诊病例超过 7.6 亿,累计死亡人数超过689 万(https://covid19.who.int/)。SARS-CoV-2 具有强烈的传染性和致病性,可通过多种途径传播,包括呼吸道飞沫或气溶胶的直接空气传播、接触污染表面造成的间接污染物传播[1]。研究显示,除了新型冠状病毒感染者的粪便样本中存在 SARSCoV-2 外,在不同疫情蔓延程度地区的废水中,SARS-CoV-2 的检出载量为 0.02~3 000 copies/mL,表明 SARS-CoV-2 的传播与水介质具有重要关系,存在经水媒介传播的风险[2-3]。此外,SARSCoV-2 已被证明在室温下的自来水和废水中保持高度传染性长达 7 天[4]。因此,开发高效清除水中 SARS-CoV-2 策略对降低其间接接触传播风险具有重要意义。
中和抗体能够有效抑制病毒进入宿主细胞,并帮助免疫系统清除病毒,在对抗各类病毒性感染疾病的临床应用中发挥重要作用[5]。SARSCoV-2 通过 S 蛋白的受体结合结构域(receptor binding domain,RBD)与宿主细胞表面上的血管紧张素转换酶 2(angiotensin-converting enzyme 2,ACE2)受体结合,介导病毒进入细胞而造成感染[6]。因而,靶向 S 蛋白的中和抗体可以直接阻断病毒与受体的结合,以抑制病毒感染。近年来,大量研究聚焦于寻找靶向 S 蛋白的高效中和抗体[7]。深圳市第三人民医院张政教授团队首次报道了具有高亲和力、高特异性的中和抗体P2C-1F11,可有效对抗 SARS-CoV-2 感染[8]。该团队在 SARS-CoV-2 感染者的单个 B 淋巴细胞中分离并鉴定出了 206 个特异性靶向 S 蛋白的单克隆抗体,从中筛选出一株高活性中和抗体 P2C-1F11。进一步研究表明,P2C-1F11 结合 RBD 时的表位和角度与 ACE2 结合 RBD 的情况基本一致,说明 P2C-1F11 与 ACE2 竞争结合 RBD 的表位,阻断了 RBD 与 ACE2 的结合,从而抑制SARS-CoV-2 进入宿主细胞[9]。目前,P2C-1F11作为预防 SARS-CoV-2 感染的候选药物,已被国家药品监督管理局紧急批准上市,有望满足我国新冠肺炎患者的临床需求。
生物杂交微型机器人是由生物组件(如细菌、细胞等)和人造组件(如纳米载体、抗体等)组成的自供能集成微型机器人[10-11]。近年来,生物杂交微型机器人被开发,并被用作一种新型的环境修复工具[12-13]。它们通过在溶液体系中自主运动,执行微纳米尺度任务,包括快速清除水环境中的病原微生物和化学污染物,如重金属[14-15]、有机污染物[16-17]、微塑料[18-19]和病原微生物[20-21]等,在大规模环境修复方面展示出良好的应用前景。与静态的微/纳米级村料相比,功能化微型机器人具有自驱动功能和动态吸附能力,可增加与目标污染物的接触机率和吸附效率,实现高效“动态”清除。细菌具有独特的鞭毛结构,被视作一种纳米马达[22]。它由内部生物能提供动力,可在水环境中自主推进,是一种理想的微型机器人候选村料。枯草芽孢杆菌(Bacillus subtilis,BS)是一种易于大规模生产、寿命长和易于表面功能化的菌株。它能够在不同的水环境中快速移动,可作为优良的自驱动模型[23]。研究表明,枯草芽孢杆菌可去除废水中的硝酸盐,在水质净化方面的应用日益受到关注[24],但在清除水中 SARS-CoV-2 方面的研究未见报道。
本文通过“点击化学”反应将中和抗体P2C-1F11 锚定在枯草芽孢杆菌表面,构建一种抗体工程化微型机器人(antibody functionalized bacteria microrobot,AB-robot)。AB-robot 保留了原有的生物自主运动性,能在各种水介质中快速移动。将 SARS-CoV-2 假病毒作为模型污染物,表面锚定有中和抗体 P2C-1F11 的 AB-robot 通过快速移动增加与靶标病毒的结合效率,实现对SARS-CoV-2 假病毒的即时捕获和有效清除。
2 材料与方法
2.1 材料
2.2 实验方法
2.2.1 抗体工程化微型机器人的制备
首先,挑选出单克隆枯草芽孢杆菌,在含有3-叠氮基-D-丙氨酸(100 μmol/L,ALA-D-N3)的无抗性 LB 培养基中 37 ℃ 培养 6 h,获得叠氮基团(-N3)代谢标记的枯草芽孢杆菌(BS-N3)[25]。然后,将中和抗体 P2C-1F11(10 μg/mL)与 DBCOPEG2000-NHS 酯(20 μmol/L)混合,室温下孵育2 h。通过超滤法(超滤膜截留分子质量 50 ku,离心转速 10 000 r/min)除去反应溶液中游离的 NHS酯,得到 DBCO 修饰的中和抗体 P2C-1F11(P2C-1F11-DBCO)。最后,将 BS-N3与 P2C-1F11-DBCO混合,室温下孵育 2 h。通过离心(5 000 r/min,3 min)及 LB 培养基洗涤 3 次,即得到 ABrobot。收集用于进一步研究。
2.2.2 抗体工程化微型机器人的表征
(1)叠氮基团(-N3)的代谢表征
将 BS 和 BS-N3分别与配对叠氮基团的DBCO-Fluor 488 避光孵育 30 min,用 PBS 洗涤3 次,再用牛血清白蛋白体积分数为 1% 的 PBS重悬。通过流式细胞术分析 N3基团在枯草芽孢杆菌表面的代谢表达效率。
(2)中和抗体 P2C-1F11 的偶联效率评价
2.5.13 术后逆行射精 等离子前列腺电切术后有一半以上患者出现逆行射精。原因可能为在术中切除膀胱颈部腺体时,破坏膀胱颈的正常结构及尿道内括约肌,造成术后膀胱颈功能不全而不能正常关闭,从而导致射精过程中精液向膀胱返流。因此,术中应尽量保留膀胱颈部的括约肌,以减少逆行性射精发生。
将 BS 和 AB-robot 分别与 anti-human IgG Antibody-PE 在冰上避光孵育 30 min,用 PBS 洗涤 3 次,再用牛血清白蛋白体积分数为 1% 的PBS 重悬。通过流式细胞术分析中和抗体 P2C-1F11 与 AB-robot 的连接效率。
2.2.3 抗体工程化微型机器人的运动行为评价
首先,考察 AB-robot 在培养基中的运动情况。将 BS、静止的 AB-robot(AB-robotDead,通过紫外照射至无运动能力)和 AB-robot 分别重悬在LB 培养基中,各取 50 μL 悬浮液滴加到载玻片上,采用倒置光学显微镜拍摄视频,纪录其各自的运动情况。然后,考察 AB-robot 在不同水介质中的运动情况。将 AB-robot 转移到含有 SARSCoV-2 假病毒(1×106TU/mL)的 PBS、饮用水和自来水中,各取 50 μL 悬浮液滴加到载玻片上,采用倒置光学显微镜拍摄视频,纪录 AB-robot 的运动情况。最后,通过 Image J 软件分析并计算运动速度和追踪运动轨迹[26]。
2.2.4 细胞培养
在含 10% 胎牛血清和 1% 双抗的 DMEM 完全培养基中培养 HEK293T-ACE2 细胞,培养环境为 37 ℃,CO2浓度为 5%。使用胰酶和含 10% 胎牛血清的 PBS 缓冲液将 HEK293T-ACE2 细胞从培养瓶中分离,并通过离心(1 000 r/min,4 min)收集细胞,以供进一步研究。
2.2.5 抗体工程化微型机器人的抗病毒效果评价
(1)中和实验
SARS-CoV-2 假病毒由深圳市第三人民医院提供,制备方法见 Ju 等[8]的描述。假病毒中和实验步骤如下。首先,将 HEK293T-ACE2 细胞以1×104/孔的密度接种到 96 孔板中,在 37 ℃ 和CO2体积分数为 5% 的环境中培养 24 h。然后,将 PBS、AB-robotDead(1×107CFU/mL)和 ABrobot(1×107CFU/mL)分别与等体积的 SARSCoV-2 假病毒(1×106TU/mL)在饮用水中孵育2 h。将所有处理组通过 5 000 r/min 离心 3 min,取上清液与 96 孔板中的 HEK293T-ACE2 细胞孵育 48 h。最后,向每孔 HEK293T-ACE2 细胞中加入荧光素酶底物,通过 IVIS®系统进行生物发光成像,对荧光素酶活性进行定量分析[27]。中和效率=[1-(样品的平均信号-背景的平均信号)/(仅病毒的对照组的平均信号-背景的平均信号)]×100%。
(2)扫描电镜表征
通过扫描电镜考察捕获病毒前后的 ABrobotDead和 AB-robot 的形貌变化。样品制备步骤如下:滴加一滴样品于硅片表面,自然晾干后进行乙醇梯度脱水(30%-50%-70%-90%-100%),然后用叔丁醇-乙醇溶液梯度置换(30%-50%-70%-90%-100%),随后进行真空冷冻干燥、喷金,最后用扫描电镜观察,并获取图像。
2.2.6 统计分析
使用 Graphpad Prism 8.0.1 软件处理实验数据,实验结果均以“平均值±标准差”(n=3)表示。组间差异采用单因素方差分析(One-way ANOVA)和 Tukey 检验进行分析。其中,*** 为P<0.001,表示有极其显著的统计学差异。
3 结果与分析
3.1 抗体工程化微型机器人的表征
本研究采用氨基酸代谢标记结合点击化学策略,构建了表面偶联中和抗体 P2C-1F11 的枯草芽孢杆菌微型机器人。D 型氨基酸是细菌细胞壁的重要组成单元。将细菌与代谢前体 3-叠氮基-D-丙氨酸(ALA-D-N3)共孵育后,通过氨基酸代谢可在细菌细胞壁上表达出叠氮基团。如图1(a)所示,与 BS 对照组相比,在 BS-N3组中,与叠氮基团配对的 DBCO-Fluor 488 荧光信号显著增强,证实了 N3基团成功标记在枯草芽孢杆菌表面。类似地,图1(b)结果显示,约有87% 的 AB-robot 表现出 PE 阳性信号。而在 BS对照组中,未显示出 PE 信号,表明中和抗体P2C-1F11 成功修饰在枯草芽孢杆菌表面。
3.2 抗体工程化微型机器人的运动评价
运动速度与迁移尺度是微型机器人的关键参数。为了探讨化学偶联是否对细菌的运动性能产生影响,本文采用光学显微镜观察 AB-robot 的运动情况。如图2(a)所示,AB-robot 的运动速度为(24.8±2.9)µm/s,与未修饰中和抗体的细菌(BS)的运动速度((25.2±2.4)μm/s)相似,而与静止的 AB-robot(AB-robotDead)的运动速度具有显著性差异。进一步分析显示,AB-robot 和 BS 具有相似的长距离运动轨迹(图2(b)、(d)),而 ABrobotDead的运动距离可忽略不计(图2(c))。以上结果表明,中和抗体的偶联过程不会对细菌的运动能力造成损伤,AB-robot 保留了细菌原有的运动速度和活力,具有高效的自主运动行为。

图2 通过光学显微镜评价 AB-robot 的运动行为Fig.2 Evaluation of the motor behavior of the AB-robot by optical microscopy
将 AB-robot 转移到含 SARS-CoV-2 假病毒的不同水介质中,测试 AB-robot 在不同水环境中的运动性能。如图3(a)所示,AB-robot 在 PBS、饮用水和自来水中均显示出快速的运动能力(>22 µm/s)。图3(b)~(d)展示了 AB-robot 在PBS、饮用水和自来水中的代表性运动轨迹,反映了 AB-robot 在这些水介质中具有高度稳定的运动性能。以上结果表明,AB-robot 能够在不同水介质中保持高效稳定的自主运动,可推广应用于复杂的水环境中新型冠状病毒的主动捕获和清除。
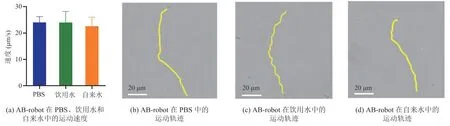
图3 通过光学显微镜评价 AB-robot 在 PBS、饮用水和自来水中的运动行为Fig.3 Evaluation of the motion behavior of AB-robot in PBS, drinking water and tap water by optical microscopy
3.3 抗体工程化微型机器人的病毒清除效率评价
假病毒是一种人工构建的与活病毒具有相似功能结构的病毒样颗粒。假病毒具有与活病毒相近的宿主细胞感染能力,且其无法产生具有感染性的子代病毒,因此常用于开发或验证新的抗病毒技术。本文采用的 SARS-CoV-2 假病毒系统包含 SARS-CoV-2 S 蛋白和荧光素酶报告基因。假病毒可以模拟感染靶细胞(HEK293T-ACE2)过程,进入靶细胞表达荧光素酶。因此,荧光素酶报告基因表达的强弱情况可以反映病毒感染细胞的程度。为了考察假病毒能否被 AB-robot 捕获,并从水介质中清除,本文对 HEK293T-ACE2 细胞被 SARS-CoV-2 假病毒侵染的过程进行可视化验证。如图4(a)所示,IVIS 生物发光结果展示了未处理组(PBS 组)发出强烈的生物发光信号,表明水中的假病毒感染了宿主细胞,并在宿主细胞内高表达荧光素酶。相比之下,静止 ABrobot 对照组(AB-robotDead)表现出中等的发光信号,而 AB-robot 处理组的发光信号可忽略不计(图4(b))。中和效率结果(图4(c))显示,ABrobot 清除了水中 95% 的 SARS-CoV-2 假病毒,是静止 AB-robot 对照组(AB-robotDead)清除率(41%)的两倍以上。以上结果表明,中和抗体P2C-1F11 修饰的高活性微型机器人通过对病毒特异靶向和快速驱动的特性,提高对病毒的接触、捕获和清除效率。

图4 不同处理组的病毒清除效率评价Fig.4 Efficiency of the virus removal in different treated groups
图5 展示了 AB-robotDead和 AB-robot 分别与SARS-CoV-2 假病毒共孵育之前(图5(a)、图5(c))和之后(图5(b)、图5(d))的扫描电镜图。可以清楚地观察到,与 AB-robotDead和 AB-robot 原本的光滑表面(5(a)、5(c))相比,与 SARS-CoV-2假病毒共孵育之后的 AB-robotDead和 AB-robot 的表面均结合了假病毒颗粒,且 AB-robot 结合的病毒粒子数量显著高于 AB-robotDead。以上结果从微观层面进一步验证了 AB-robot 对病毒的高效捕获。

图5 捕获病毒前后的 AB-robotDead 和 AB-robot 的扫描电镜图Fig.5 SEM images of the AB-robotDead and AB-robot before and after capture the virus
4 讨论与分析
尽管通过目前的水体消毒工艺能一定程度上减少水中的 SARS-CoV-2,但考虑到 SARSCoV-2 的高稳定性和高致病性,所以亟须开发出更为严格和高效的病毒清除技术。Schoeler 等[28]开发了一种聚氨酯泡沫复合村料,以去除水中SARS-CoV-2。SARS-CoV-2 通过静电相互作用被表面带相反电荷的聚氨酯泡沫复合村料直接吸附,但是该方法缺乏病毒特异性,难免影响SARS-CoV-2 的清除效率。在本研究中,中和抗体 P2C-1F11 通过点击化学反应修饰到细菌微型机器人表面。其中,中和抗体 P2C-1F11 已被证明对 SARS-CoV-2 S 蛋白具有高效、特异的靶向能力,并被批准上市用于 SARS-CoV-2 的治疗和预防。本研究将中和抗体集成到自驱动细菌微型机器人平台,以特异性的方式结合来自复杂环境的病毒。与常见的基于物理吸附作用的捕获方式相比,这种基于抗原特异性捕获方式显著提高了捕获 SARS-CoV-2 的效率。
Sun 等[29]提出了一种基于纳米抗体功能化纤维素村料捕获 SARS-CoV-2 的策略。该团队通过纤维素村料表面的纳米抗体对病毒进行捕获,阻断对宿主细胞的感染。然而,利用纳米村料捕获水体污染物的过程需要外加机械搅拌等方式来提高纳米村料的扩散程度,增加纳米村料与污染物的接触机会和清除效率。本研究构建的抗体工程化微型机器人的运动实验表明,AB-robot 保留了细菌固有的自驱动特性,能在各种水介质中快速运动,有效促进流体的混合,同时加快抗体扩散速度,增加了中和抗体与 SARS-CoV-2 的特异性接触和结合效率,从而提升了 SARS-CoV-2 的清除效率。本研究利用 SARS-CoV-2 假病毒为污染物模型,验证了 AB-robot 对病毒的结合和清除能力。研究结果表明,在高浓度的病毒载量下,AB-robot 的清除率高达 95%。使用 AB-robot 捕获 SARS-CoV-2 假病毒后,进行离心分离处理,可以在不影响病毒清除效率的情况下从水介质中分离出 AB-robot。该操作简单快速,具有相当大的实际应用潜力。
虽然本文目前的研究仅以新型冠状病毒为污染物模型,但是这种“运动和修复”双功能的微型机器人概念及构建技术还可以扩展应用到其他的病原微生物领域。未来的研究可以通过使用其他特异性靶标分子替换中和抗体模块,实现对其他类型病毒或病原微生物的靶向捕获。随着新型冠状病毒不断迭代和突变,新出现的突变株发生比较严重的免疫逃逸,导致许多已有的中和抗体的中和效果显著降低[30],从而在一定程度上影响AB-robot 对新冠突变株的捕获和清除效果。但是目前已经鉴定出更多的靶向 SARS-CoV-2 不同表位的特异性中和抗体,未来工作可以基于多价结合方式研究不同新冠抗体组合,以提高对新冠变异株的捕获效率[31-32]。
5 结 论
本研究采用氨基酸代谢标记与点击化学技术结合的策略,将中和抗体 P2C-1F11 修饰在具有自驱动功能的枯草芽孢杆菌表面,成功构建了抗体工程化的微型机器人(AB-robot),用于清除水中 SARS-CoV-2。AB-robot 不仅保留了细菌固有的自驱动活性,还增强了中和抗体对病毒的特异性靶向性能,在各种水介质中快速运动,并高效捕获病毒。在 SARS-CoV-2 假病毒污染物模型中,AB-robot 的快速运动促进表面修饰的中和抗体 P2C-1F11 与靶病毒的高效结合。AB-robot对 SARS-CoV-2 假病毒的清除率高达 95%,实现了靶病毒的即时捕获和高效清除。总之,本研究提供了一种简单、快速、高效的清除水中病毒污染物的技术,为阻断水中病毒的传播提供了新思路。