基于无人机SfM及LaDiCaoz的地震地表破裂定量参数提取
——以炉霍扎交村一带地震典型地表破裂为例
2024-01-25梁明剑周文英吴微微刘书淮
廖 程 梁明剑 周文英 吴微微 刘书淮
1 四川省地震局,成都市人民南路三段29号,610041 2 中国地震局成都青藏高原地震研究所,成都市人民南路三段29号,610041 3 重庆市地震局,重庆市红黄路339号,401147
活动断裂的位错量是活动构造研究中的一项重要参数,断裂的同震位错和累积位错对理解断裂的运动学过程和机制及地震危险性评价具有重要意义[1]。传统断裂位错测量主要通过野外工作者的观察和皮尺测量获得,会因视觉等产生误差,也无法对测量结果进行验证。LaDiCaoz是Zielke等[2]基于MATLAB开发的一款专门用于走滑断裂位错测量的专业软件,通过高精度DEM数据对断层两侧的地形剖面形态进行整体评估,得出位错地貌的最佳位错量[3],结果具有较高的可靠性[4-5]。
高精度高分辨率的地形地貌数据能够刻画细微的地表精细结构,是活动构造定量研究的基础[2]。传统数字化地图和野外地形测量受自然条件制约,存在效率低、范围小、周期长等问题[6],而目前流行的机载激光雷达(light detection and ranging,LiDAR)虽可以快速获取大范围的、高精度地形地貌数据,同时剔除植被覆盖的影响,但因高成本和复杂的数据处理过程,限制了其在活动构造研究中的应用。近年来,随着无人机(unmanned aerial vehicle,UAV)和数字测量技术的发展,一种效率高、成本低、操作便捷的新型三维场景重建技术(structure from motion,SfM)被广泛用于小范围高精度和高分辨率的地形地貌测量,特别适用于植被稀少的地区[7]。
资料显示,炉霍地区1811年以来共发生6级以上地震5次,7级以上地震3次[8],其中1973年炉霍7.6级地震产生3.6 m的水平位错及长达90 km的地表破裂,造成巨大的人员伤亡和财产损失[9-10]。本文以炉霍扎交村一带地震典型位错地貌为例,基于无人机摄影、新型三维场景重建技术(SfM)及LaDiCaoz软件获取高精度、高分辨率地表破裂地形地貌数据,并对其进行位错提取,探讨相关技术在活动构造研究中的运用。
1 炉霍扎交村一带地震典型地表破裂带
鲜水河断裂位于青藏高原东缘,为巴颜喀拉块体和川滇菱形块体的边界带,是中国大陆地区地震活动性最强的大型左旋走滑断裂带(图1(a)),过去300 a共发生7级以上地震8次、6.5级以上地震16次[8,11],震中几乎遍布整条断裂。扎交村位于鲜水河断裂炉霍段,该区较为典型和较新的地表破裂产生于1973年炉霍地震,破裂带自旦都向NE和SE两个方向延伸,向SE延伸至虾拉沱一带,破裂类型丰富多样[9]。在炉霍县虾拉沱镇扎交村一带,可见地震地裂缝、地震鼓包、地貌位错和挤压脊等丰富的地震遗迹,通过现场调查和无人机摄影可以清晰地看到地表破裂和断裂行迹(图1(b),通过SfM处理后裁剪得到地貌正射影像),其中有2个典型的地表破裂构造:山脊位错地貌(图1(b)区域A)和挤压脊地貌(图1(b)区域B)。
山脊位错地貌(区域A)的照片及模式如图2所示,其中图2(b)为小飞机垂直摄影得到的地貌影像。从图2可以看出,断层切过山脊,有明显的位错和破裂面,为断裂发生左旋走滑、断层两盘向相反方向运动形成。挤压脊地貌(区域B)的照片和模式见图3,其中图3(d)为LaDiCaoz软件叠加等高线后的高精度地形地貌影像。从图3可以看出,相对于小飞机直接拍摄的影像,高精度地形地貌数据能更清晰地识别出断裂行迹,挤压脊的形成主要受控于主断裂及其分支断裂相互挤压作用,同时沿主断裂可见一系列拉张裂缝。
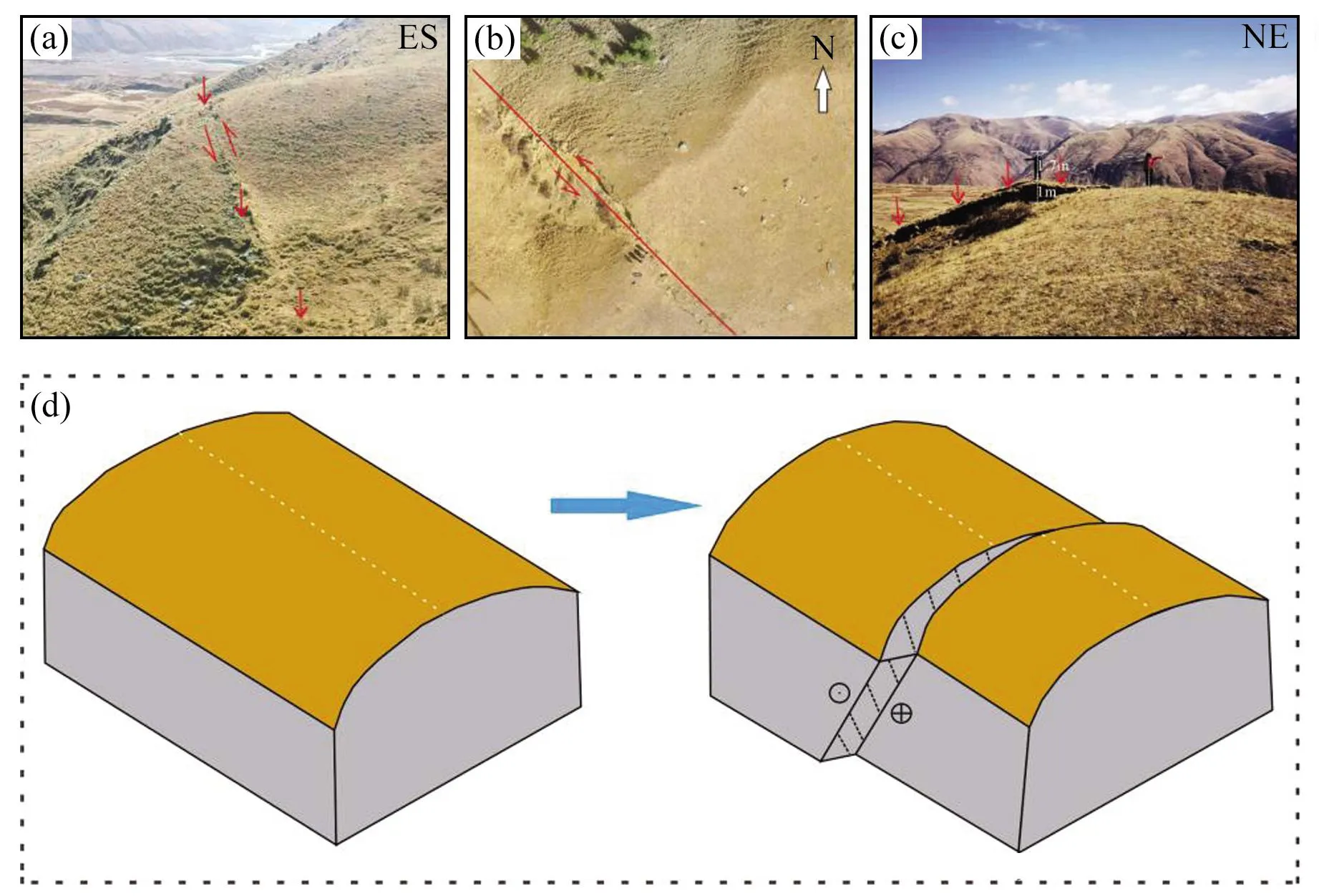
图2 山脊位错照片及模式
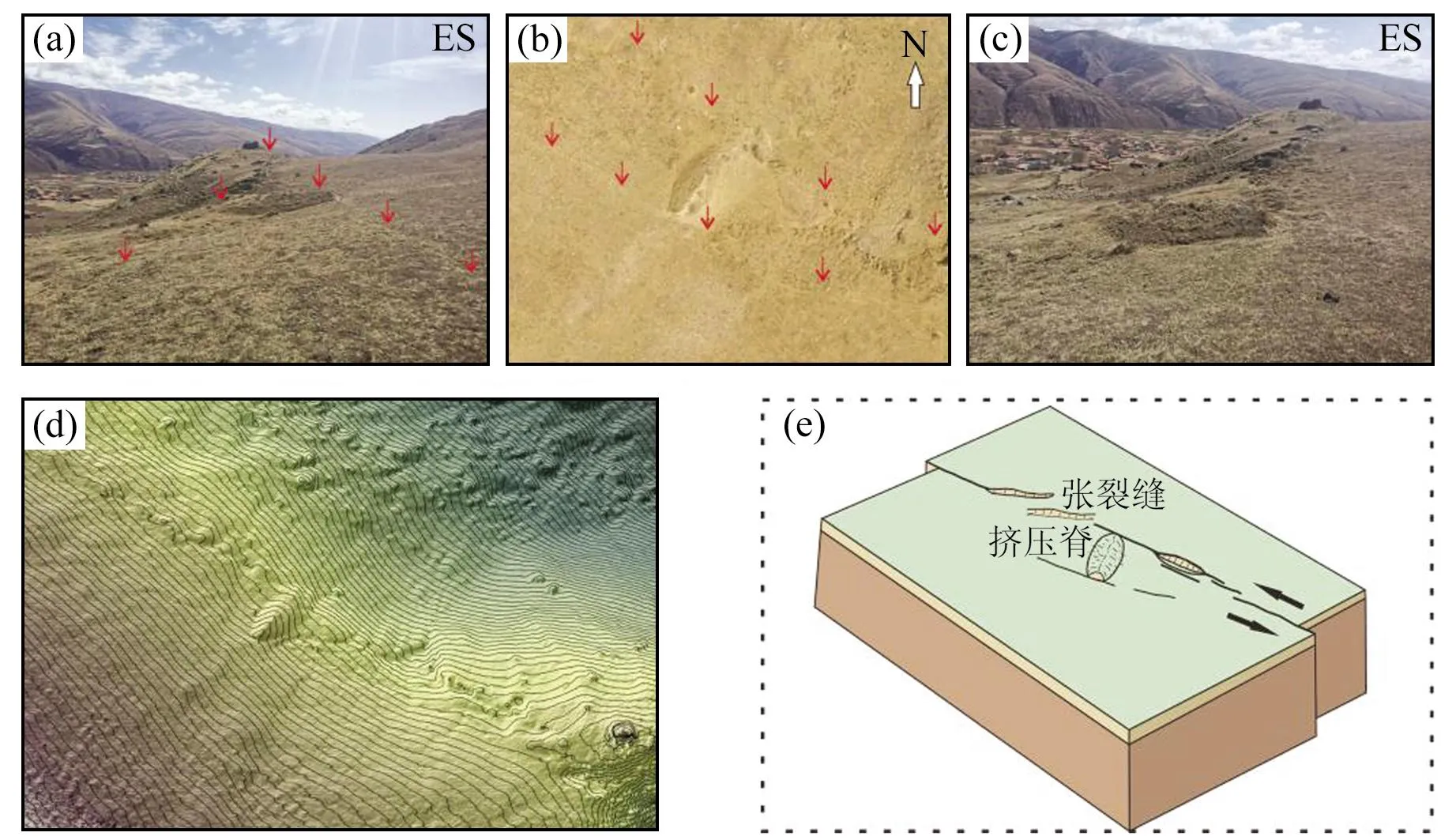
图3 挤压脊照片和模式
2 典型地貌位错定量参数提取
本文以研究区内典型山脊位错地貌(图2)为例,详细介绍相关方法在位错提取中的运用。位错提取主要包括4个步骤(图4):1)野外数据采集,在野外通过小型无人机对位错地貌及附近区域地形地貌进行垂直地面拍摄,获取区域内清晰的影像照片;2)SfM三维地貌重建,将无人机拍摄的影像照片导入Agisoft PhotoScan软件进行拼接,并生成区域高精度DEM文件(tiff格式);3)格式转化,将高精度DEM文件导入ArcGIS,通过转换工具将tiff文件转换为asc文件格式;4)LaDiCaoz位错提取,将转换后的asc文件导入LaDiCaoz软件,按照软件界面流程依次输入和调整相关参数,获取位错地貌的最佳位错量。

图4 位错提取流程
2.1 无人机野外数据采集
小型无人机摄影具有成本低、效率高、携带方便和操作简单等优点,被广泛用于野外地质测量工作中。本文使用大疆精灵Phantom 3 Pro进行野外数据采集,该无人机系统搭载20 mm低畸变广角相机、高精度防抖云台及1 200万像素图像传感器,保证了影像的高分辨率、低畸变和高色彩还原度等特征,同时搭载用作精准定位悬停和平稳飞行的视觉定位系统,可以很好地辨识地面纹理和相对高度。该款无人机系统的总重量为1 645 g,较其他系列重,可更好地适应较大风力环境。本次无人机拍摄时间为晴朗弱风的下午,确保拍摄时光线充足,飞行平稳。根据现场环境和断裂走向,设置飞行高度为80 m,航向和旁向重叠度分别为80%和70%。航向尽量平行于断层走向,相机正射向下垂直于地面拍摄,可保证较高的地面分辨率及足够的覆盖率。通过无人机航拍,最终获得高分辨率影像照片153张。此次断裂影像采集区位于高原草甸区,地表覆盖物少且视野开阔,现场提取影像数据可很好地反映真实地形情况下的DEM数据。
2.2 SfM三维地貌重建
SfM方法的核心思想是通过特征匹配算法获取多视图影像之间的同名特征,初步估计相机位置和目标物的坐标,然后利用非线性最小二乘算法不断优化,最终自动求解出目标物的三维空间坐标[12-13]。该方法可将不同拍摄高度、角度,甚至不同相机拍摄的影像数据组合在一起进行处理,对摄影相机及拍摄者的技术要求较低[14]。
本文利用集成 SfM方法的Agisoft PhotoScan软件进行影像照片的处理,该软件主要对无人机获取的影像照片进行拼接,经过对齐照片、建立密集点云、生成网格、获取正射影像和建立DEM等5个步骤完成拼接,其中前3个步骤的相关参数设置会影响正射影像和DEM数据的分辨率。本文设置对齐照片精度为高,成对预选为通用,建立密集点云质量为高,生成网格表面类型为任意,源数据为密集点云,面数为中。
在将影像导入PhotoScan软件前,将成像不清晰、光线不足及偏离研究区范围太远的影像进行剔除,之后对齐照片,目的是对影像特征进行提取并匹配,得到影像间的相对位置关系,该精度对三维重建结果有重要影响。在此基础上建立密集点云,主要根据多视角立体摄影测量(MVS)算法在影像对之间进行逐像素搜索和匹配[12],并生成高密度点云数据,此时分辨率可达cm级,该步骤对计算机性能要求较高[15]。最后在高精度密集点云数据的基础上生成网格,得到分辨率为1.1 cm/pix的正射影像(图5(a))和4.4 cm/pix的DEM数据(图5(b)),并基于DEM数据生成山体阴影图(图5(c)),其点云密度为256点/m2,有效重叠约13.8次,影像覆盖度在9张以上的面积区域约占区域覆盖总面积的70%。从图5可以看出,生成的数据分辨率较高,可清晰识别断层的几何形态和微小地貌特征,并对地表破裂进行精细解译。

图5 SfM方法影像照片处理结果及地表破裂精细解译
2.3 格式转化
将高精度DEM.tiff数据导入ArcGIS10.2,通过ArcToolbox-转换工具-由栅格转出-栅格转ASCII流程,最终实现对DEM数据的格式转换,为下一步的位错提取提供高精度、高分辨率的DEM.asc数据。
2.4 LaDiCaoz位错提取
目前,LaDiCaoz软件在活动构造研究中已有较多运用[12,16]。本文采用LaDiCaoz_v2.1软件对地貌位错进行提取,主要步骤为:
1)数据输入。将位错周围区域高精度高分辨率的DEM.asc数据导入,当加载类型为其他时,会在Offset from Back-Slipping处理过程中出现错误提示,因此处理时选择导入asc类型数据。另外,当导入区域范围过大时会导致图像加载时间过长,后期步骤处理缓慢,需要在ArcMap中运用Clip工具进行裁剪处理。
2)数据显示。通过鼠标定义范围对测量的位错地貌及周边区域进行裁剪,选择地形(topography)作为裁剪区域的顶层,选择山体阴影(hillshade)作为底层,设置Azimuth为1、Zenith为40、Z-factor为1、顶层图层的清晰度为0.5、底层图层为1,从而获得更清晰的破裂带行迹和地形地貌特征;设置等高线间距为0.3 m,便于沿等高线拐点追索标志性位错地貌的精细走向趋势。
3)绘制断裂行迹。根据叠加了等高线的高精度高分辨率地形地貌图,通过两点一线绘制断裂行迹;设置断裂行迹(图6(a)淡蓝色线)到上下部剖面线的距离为6 m,软件自动生成平行于断裂行迹的2条剖面线(图6(a)红色和蓝色线);设置剖面线宽度为0.5 m,切割红色剖面上需要拟合的山脊剖面(图6(a)红色剖面线上两黄点控制的剖面段),为计算最佳偏移量提供参考标志性地貌剖面。

图6 LaDiCaoz软件位错提取过程及结果
4)追索地貌特征。根据山脊地形地貌特征绘制断裂两侧的山脊趋势线,并使趋势线交于断裂,设置剖面线宽度为0.5 m。
5)绘制纵向剖面。在显示已完成的山脊剖面上绘制山脊上下部纵向剖面走向,绘制完成后,软件自动提取水平位错值为6.663 81 m,垂直位错值为0.547 06 m。
6)计算最佳偏移量。根据自动提取的位错值,输入水平位移量范围为-10~10、dx=0.1,垂直位移量范围为-1~1、dy=0.1,之后软件会根据断裂两侧剖面线拟合地貌标志体,得到最佳偏移量为水平位错值-6.3 m、垂直位错值0.4 m。从图6(d)可看出,山脊剖面线在拟合后能较好地重合,误差值最低时即为最佳偏移量。在获得最佳偏移量后,通过“试错”的方式尝试回滑一定的位移值(最佳偏移量附近),并结合误差曲线得到误差范围,最终得到水平位错为6.3(+0.5/-0.7)m,垂直位错为0.4(+0.1/-0.1)m。
7)偏移量回滑。输入得到的最佳偏移量,通过回滑时断层地貌沿断层平面两侧相对滑动,对断错地貌位错前原始形态进行可视化检查,通过回滑得到断错地貌位错恢复图。回滑后断裂两侧的山脊地貌剖面匹配度较高(图6(b)),说明拟合的位错结果能准确反映断错地貌位错前的原始形态,拟合的位错结果合理可靠。
8)数据输出选项。对山脊位移量进行质量评定,确定其作为位错滑移指标的可靠性,根据地貌复杂程度和可靠度可分为“high”、“high-moderate”、“moderate”、“moderate-low”、“low”五个等级。此次位错山脊与断裂夹角大,山脊受剥蚀及其他外动力地质作用破坏小,断裂两侧山脊长而直,能清晰判断山脊走向趋势,因此对山脊位移量的质量评定为“high”。
9)保存结果。对LaDiCaoz软件所有输入参数、原始底图、山脊剖面、有山脊和断裂轨迹的底图及回滑地形图等进行保存。
3 结 语
本文利用无人机SfM方法获得高分辨率正射影像及高精度DEM数据,基于高分辨率的DEM数据,利用LaDiCaoz软件对炉霍扎交村一带典型地震位错地貌的位错量进行定量提取,最终拟合得到位错地貌的水平位错为6.3(+0.5/-0.7)m,垂直位错为0.4(+0.1/-0.1)m。水平位错量明显大于垂直位错,且断裂以左旋走滑为主,与鲜水河断裂活动性质一致,位错量大小与实际情况相符(实测的水平位错量为5.8 m),回滑后断裂两侧的山脊地貌剖面具有较高的匹配度,说明软件拟合结果可靠。
炉霍地区1811年来发生的5次大地震中有3次产生了地表破裂,其中1973年炉霍地震在震中虚虚村一带产生3.6 m的水平位错。由于同震水平位错自震中向两侧逐渐减小[9,17-18],本文研究区位于虾拉沱一带,该地震在此处产生的同震位错必小于3.6 m。钱洪等[19]根据炉霍地区不同地震位错地貌数据进行分析认为,1973年和1816年2次地震在扎交村一带产生的累积位错量约为4 m,小于本文测量结果6.3 m。此外,梁明剑等[20]在位错地貌点西北侧约800 m处及500 m处开挖3个探槽,揭示了6次古地震事件,证实1973年和1816年地震在研究区一带产生了地表破裂。综上认为,本文山脊位错地貌的位错量是至少受3次强震影响的结果。
通过无人机SfM方法可高效、便捷、低成本地获取小范围区域高分辨率、高精度地形地貌数据,且数据质量可满足活动断裂精细结构研究和定量参数提取,在川西植被覆盖较低的高海拔地区有广阔的应用前景,但在野外测量中受天气状况和电池续航能力影响较大,无法满足大规模地震地表破裂带调查工作。利用LaDiCaoz进行位错提取时,可根据高精度地形地貌数据对标志性地貌的趋势线进行更加准确的追索,并通过回滑恢复原始地貌状态来检验结果的可靠性,进一步减小了人为因素产生的结果误差,实现了对活动断裂位错量提取的半自动化。
