基于LSTM-Adam的矿井提升机故障预警模型*
2024-01-25郭星燃李娟莉
郭星燃,李娟莉*,苗 栋,李 博
(1.太原理工大学 机械与运载工程学院,山西 太原 030024;2.煤矿综采装备山西省重点实验室,山西 太原 030024)
0 引 言
随着新型传感器技术的发展以及监测诊断理论的不断应用,故障预警技术得到了有效的发展,从而大大降低了煤矿故障事故的发生概率。但目前故障预警技术仍有很大的发展和进步空间[1]。
矿井提升机是煤矿生产的重要机械设备。不少专家学者在提升机故障诊断领域进行了大量的研究[2]。李娟莉等人[3]提出了面向知识工程的提升机故障诊断方法,解决了提升机故障诊断准确率低的问题,随后又提出了一种基于四层物联网感知的故障诊断方法,实现了对远程提升机的监测和诊断目的[4];但上述方法无法用于对故障进行提前预警,且需要大量的先验知识。在机械设备预警领域,传统预警手段大多从特征提取角度出发去研究引发故障的原因和其所征兆的特定设备运行状态[5],通过建立两者之间的对应关系,根据特定的故障现象进行预警[6]。CHEN X Z等人[7]采用能量故障树分析的方法,实现了对机床故障的有效预警目的。王新刚等人[8]提出了基于变分模态分解和最大相关峭度解卷积相结合的轴承预警方法,完成了对轴承故障的早期判断。李丹宁等人[9]采用模糊神经网络的方法,完成了对采煤机滚筒温度的故障预警;但上述研究方法需要大量的样本数据,对数据的完整性要求较高,且过度依赖人工经验。
随着大数据时代的到来,大数据驱动下的故障预警技术逐渐受到广大学者的青睐[10]。LIU G J等人[11]采用了一种基于贝叶斯网络进行核电汽轮机故障预警的方法,解决了设备运行过程中数据的不确定性问题。随后,SHI Y L等人[12]在单一贝叶斯基础上,提出了贝叶斯和特征权重测量树模型相结合的优化方法,并将其应用到风机高密度异常数据监测上;但随着数据量的增大和复杂化,基于贝叶斯网络的预测模型很难保证预测的准确性。在提升机故障预警领域,相关研究相对较少。王致杰等人[13]采用小波网络的方法,建立了预测模型,实现了对提升机钢丝部分的特征参数进行准确预测的目的;但该方法建模复杂。王超等人[14]提出了基于数字信号处理的提升机故障监测和诊断方法,通过分析振动信号来预测提升机零件的故障;但该方法会导致故障预警无法贴近提升机的实际特征。
上述研究方法在大数据驱动下,通过对特征参数的提取进行故障预警,摆脱了对人工经验的过度依赖;但随着时间的推移,上述方法存在预测误差逐步增大、拟合性较差等问题。
LSTM作为循环神经网络的优化算法之一,在时间序列数据的处理领域得到了广泛的应用[15]。在故障预警与诊断方面,ROJAS-DUENAS G等人[16]将卷积神经网络(convolutional neural networks, CNN)和LSTM相结合,提出了一种基于CNN-LSTM的故障预测模型,并将其应用于电机转换器的健康状态诊断,该模型能够有效地用于预测设备的有效寿命。LI Z等人[17]将自动编码器和LSTM相结合,提出了一种利用异常数据的多特征序列进行机械系统异常检测的方法。LIU L等人[18]提出了基于LSTM的动车轴承故障预警方法,实现了对高速动车组轴承的实时预警目的。
根据上述研究可知,LSTM在时间序列数据的处理和预测方面具有良好的效果;但为了充分考虑不同工况下设备特征参数的独特性,尽可能提高故障预警的精度和效率,LSTM模型还有很大的优化和改进空间。
综上所述,针对复杂环境下提升机特征参数的独特性难以充分贴合和故障预警困难等问题,笔者提出一种基于LSTM-Adam的提升机故障预警模型,在LSTM的基础上增加全连接层,联合Adam优化器建立模型;采用滑动比例均值法对预警残差进行处理,得出合理的预警阈值,以确保提升机故障预警模型的有效性。
1 基于LSTM-Adam的故障预警框架
笔者所研究的矿井提升机故障预警模型的主要框架可以分为以下四部分。
1)数据采集
笔者在提升机的关键部位安装相应传感器,并模拟输入模块。当采集到实时运行参数后,采用工控机完成提升机实时数据的存储。还可以利用远程通讯技术将采集到的数据应用于远程故障预警与诊断。对提升机特征参数采集的方法见课题组已发表的论文[19]。
2)数据预处理
由于作业环境的多变和复杂,提升机数据存在数据量大、时变性、异构性与冗余、缺失等特性。数据的预处理主要包括补充缺失值和冗余处理。补充缺失值的方法一般采用统计学期望填充方法,对于缺失严重或数据量较大的情况,可将该条数据删除。冗余处理可以分为数据冗余和参数属性冗余,通常采用删除的方式来保持数据的一致性。
3)预警模型搭建与优化
笔者提出一种以LSTM为核心算法的提升机故障预警模型,包括输入层、输出层和隐藏层三层网络结构。在此基础上,为了进一步提高精度,笔者结合Adam算法对模型进行训练和优化。
4)实验验证
笔者采用某矿实时监测数据对所搭建的模型进行验证,原始数据包括6个系统的60多项参数,并将其中关键参数应用到提升机的故障预警模型中。通过对模型的准确性等性能进行评估,以验证LSTM-Adam模型性能的优越性。
2 故障机理分析
2.1 矿井提升机组成与工作原理
矿井提升机主要由制动系统、运行系统、主轴装置、电控系统等系统组成。主轴装置是矿井提升机的核心机构,包括滚筒、主轴、主轴轴承等,其主要作用是缠绕和下放钢丝绳,并在正常工作和紧急情况下承担相应的载荷。提升机运行系统包括主电机、联轴器和减速器,其作用是为整个提升机工作系统提供动力,并通过减速器将输出扭矩转换为适当的工作扭矩,同时将转速调整为适宜的转速。
制动系统包括制动器和液压站,其功能包括:1)正常工作阶段的减速和停车制动;2)安全制动;3)维修时的工作制动。润滑系统是在提升机工作过程中不断地向齿轮、轴承等接触面输送液压油,保证良好的啮合工作。电控系统用于控制提升机的启动、加速、匀速和减速,并具备必要的电气保护和联锁功能。综上所述,通过多系统协调工作才能保证提升机平稳运行。
以单绳缠绕式提升机为例,其工作原理是:将钢丝绳的一端缠绕在提升机卷筒上,另一端悬挂提升容器,通过滚筒不同方向的转动,实现钢丝绳的缠绕或放松目的,完成提升或下放的任务。
2.2 提升机常见故障
由于提升机的工作环境复杂多变,造成提升机故障的原因繁多,故障表现形式也不尽相同。
笔者主要研究引发提升机故障的常见故障表现形式,包括制动油压、润滑油压、闸瓦间隙、闸力、主电机电流等关键影响因素,并将提升机部分常见故障表现形式和原因进行分类列举。
提升机故障树如图1所示。
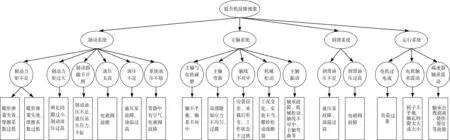
图1 提升机故障树Fig.1 Hoist fault tree
由图1可知:提升机的故障表现形式往往关联着制动油压、油温、闸力、闸瓦间隙、润滑油压、主轴振动加速度、润滑油压和电机电流等参数。
因此,笔者对这些故障表现形式的特征参数进行分析,其能够根据参数的变化情况对提升机的相关故障进行预警。
通过对提升机数据的分析可知,提升机数据和提升时间之间存在明显的周期性变化,且每个周期均包含加速、匀速、减速和爬行等阶段。LSTM所具备的长期记忆和短期记忆功能能够很好地用于处理较长时间序列,因此,笔者采用LSTM对提升机的数据进行分析和处理。
3 故障预测模型
3.1 算法介绍
LSTM是基于循环神经网络(recurrent neural network,RNN)的一种优化算法。
与传统的RNN网络相比,LSTM网络具有以下优势:1)能够有效避免梯度消失和梯度爆炸的问题;2)LSTM能够有效解决长序列的依赖问题,从而提高了数据预测的准确率。
LSTM主要由细胞态和门控结构两部分组成,其原理如图2所示。
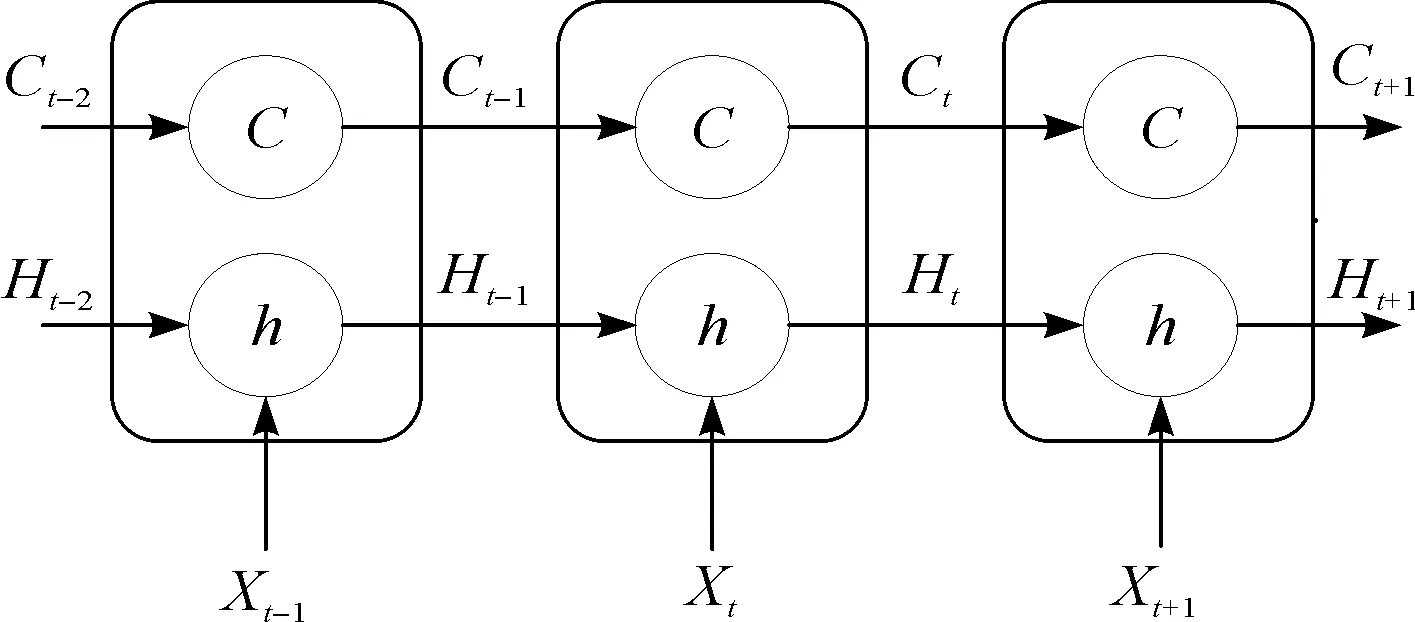
图2 LSTM原理图Fig.2 LSTM schematic
细胞态可以看作传播过程中的一个隐藏状态,类似于一个传送带,其可以进行线性传输,即图2中C所表示的部分。
门是一种让信息选择性通过的方式,通过将元素与门的输出向量相乘来实现对信息的控制,其中包括输入门(ft)、输出门(it)和遗忘门(Ot),其作用分别是对上一时刻的细胞态进行选择性忘记、对当前序列位置输入元素特征的选择性记忆以及调整短期记忆细胞态的权重,其公式表示如下:
ft=σ(Wf·[ht-1,xt]+bf)
(1)
it=σ(Wi·[ht-1,xt]+bi)
(2)
Ot=σ(Wo·[ht-1,xt]+bo)
(3)
式中:ht-1为上一时刻细胞的输出值;xt为当前时刻的输入项;W为待训练参数矩阵;b为待训练偏置项。

(4)
(5)
式中:ft为遗忘门函数;Ct-1为上一时刻细胞态。
短期记忆是对上一时刻细胞所传递的特征和当前时刻输入特征进行提取和保留,其公式表示如下:
ht=Ot*tanh(Ct)
(6)
3.2 预测模型搭建与优化
笔者以LSTM神经网络为基础,结合Adam优化算法对LSTM预测模型进行优化。根据所训练的模型对提升机的参数变化趋势进行分析,并利用前L个数据来预测第L+1个数据。
训练过程分为以下两个部分。
1)数据预处理
笔者采用某矿真实运行数据作为训练样本数据。
特征参数如表1所示。
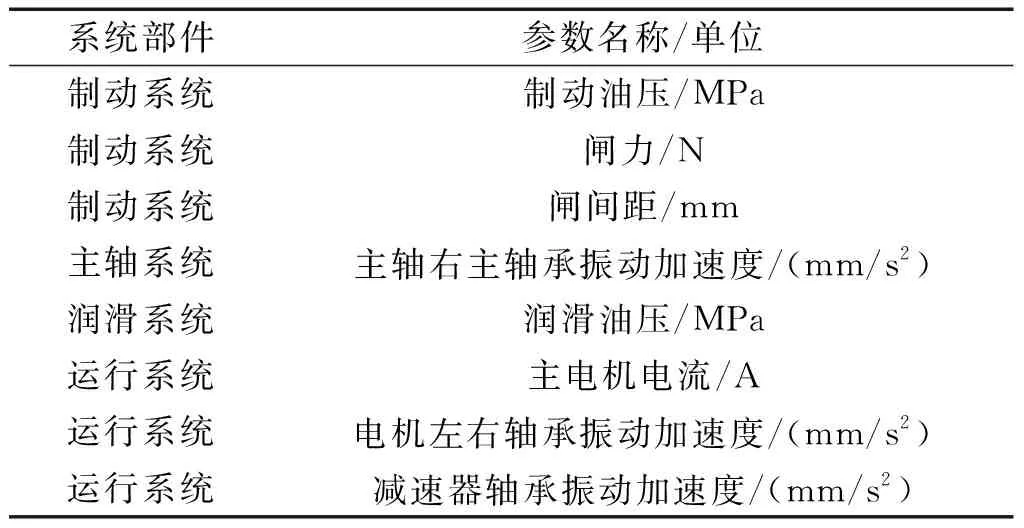
表1 特征参数Table 1 Characteristic parameters
训练开始前,笔者在输入层定义原始数据集为F,并将数据集划分为训练集Ftr和测试集Fte。

Xscraled=(X-Xmin)/(Xmax-Xmin)
(7)
笔者采用数据分割的方式对数据进行分割,设分割数据的长度为L,则分割后的输入可表示如下:
X={x1,x2,…xL}
(8)
2)模型的搭建与改进优化
由于该研究属于时间序列数据的线性回归问题,因此,笔者在输出层增加全连接层对输出特征维度进行转换,其公式表示如下:
ypre=actication[dot(input,kernel)+b]
(9)
式中:kernel为权重矩阵;actication为激活函数;ypre为预测输出。
输出过程可以理解为笔者对LSTM网络所提取的特征(input)进行加权求和处理,采用激活函数得到预测输出。
LSTM-Adam预测模型框架如图3所示。
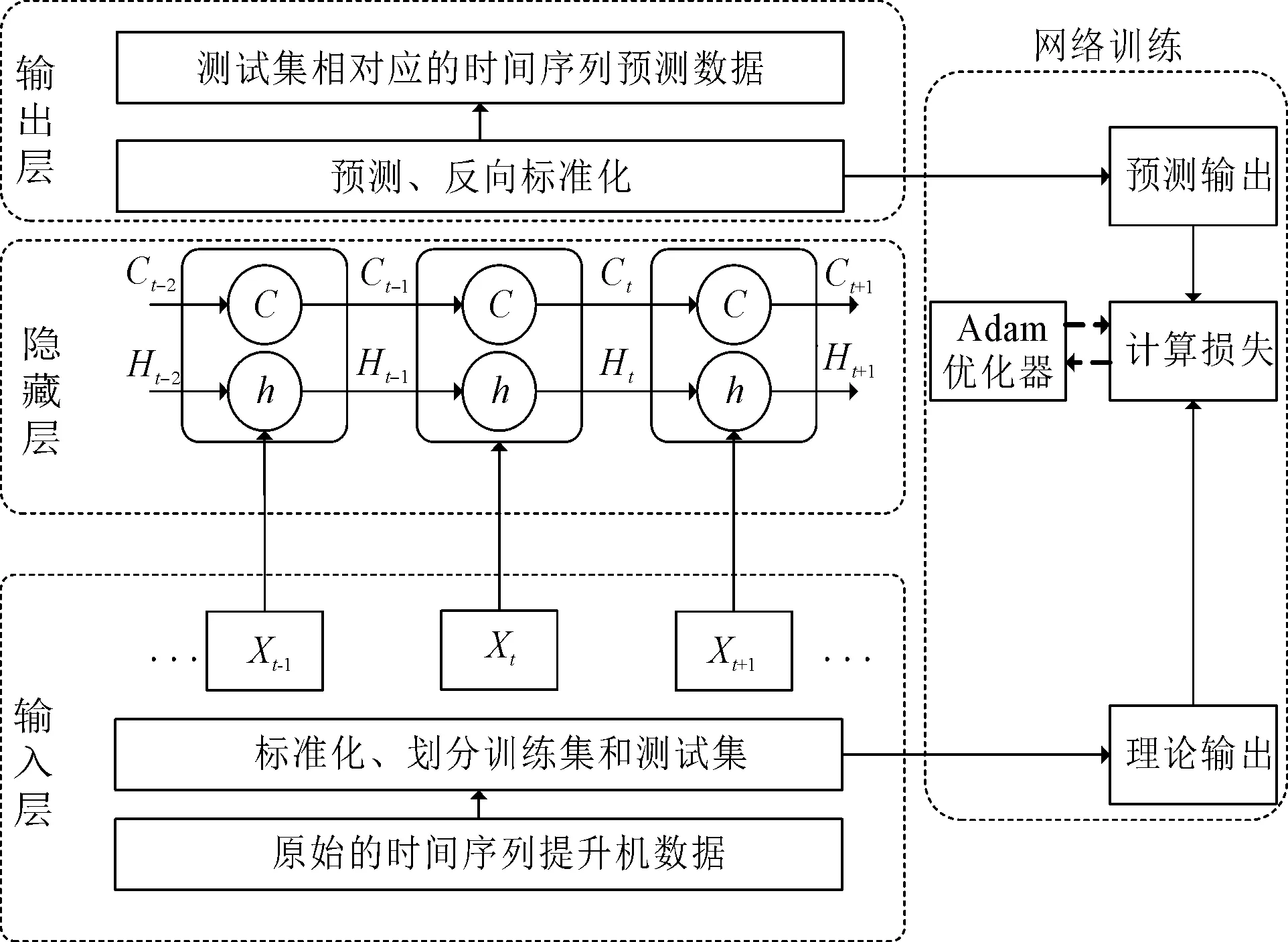
图3 LSTM-Adam预测模型框架Fig.3 LSTM-Adam prediction model framework
在模型训练过程中,笔者采用Adam算法对模型进行训练和优化。
Adam优化算法结合了适应性梯度算法和根方传播的优点,利用梯度一阶矩估计计算自适应学习率,并充分考虑二阶矩估计,计算出更新步长。简而言之,Adam优化算法通过动量和自适应学习率α来提高收敛速度。其迭代过程为:1)初始化学习率等参数;2)计算目标函数梯度以及一阶、二阶矩估计;3)对一阶和二阶矩估计进行矫正并更新待求解参数。
笔者选取均方误差作为评价指标,均方误差是预测值与真实值之差的平方的期望,其公式表示如下:
(10)
3.3 预测模型验证与结果分析
为了验证改进优化后的LSTM-Adam预测模型性能,笔者基于某矿的实际运行数据进行验证。其中,数据的采集间隔为1 s。
验证可分为如下两部分:
1)预测模型训练
根据前两节提出的预测模型训练方法,笔者选取30 000条数据,将数据标准化处理之后,最终得到时间序列数据,并将其划分训练集和测试集。
经过对提升机参数的研究发现,当时间序列长度L取值为100时,预警模型都能够达到良好的预测效果。通过对比验证,当学习率为0.015时,损失率达到最小值0.118 6%。设定损失函数最小为评价指标,给定随机种子seed=11,学习率为0.015,训练步数step=600,应用Adam优化算法不断更新网络权重,最终得到最优的预测模型;
2)预测模型拟合验证
为了验证预测模型的有效性,笔者采用某矿提升机的实际运行数据对其关键参数进行预测,并将预测结果与提升机的实际运行值进行拟合对比。
以主电机电流为例,真实值与预测值拟合图如图4所示。

图4 真实值与预测值拟合图Fig.4 Fit of true and predicted values
由图4可知:在笔者获取的23个测试点上,采用LSTM预测模型很好地预测到了真实值的变化趋势,达到了比较理想的预测效果。
4 故障预警模型
4.1 基于滑动窗口的残差分析
在煤矿实际生产过程中,处于恶劣环境下的提升机工作负荷较大,时常由于传输信号波动等问题,出现数据缺失和异常等情况。在正常情况下,LSTM预测模型具有较高的精度;但当数据出现潜在异常时,随着时间的推移,模型的预测误差可能会显著增大。因此,笔者采用滑动窗口法对残差进行处理,进而有效降低异常数据等因素对残差变化的影响。
滑动窗口的原理是对时间做片分,即窗口随着时间向前滑动,并对每个窗口内的数据进行统计。
笔者采用滑动加权均值法对系统数据残差进行处理,即取长度为L的窗口对误差进行处理,计算该窗口下的比例均值,比例均值计算公式表示如下:
(11)
式中:ei为样本残差绝对值;Xn为所求的样本点的残差比例均值;w1为权重;w2为权重。
在利用滑动窗口法求得各个点的残差均值之后,笔者统计得到残差加权均值的最大值¯Xemax,并将其作为报警阈值。笔者选取滑动窗口大小为100、w1为0.01、w2为0.1,对所得数据残差进行分析。
由于提升机的工况不同,预警残差也会有所区别,所以预警阈值分为运行阈值和静止工况阈值。然而,在提升机运行时,受到振动、摩擦和负载变化等多种因素的影响,其状态往往比静止状态更加复杂和多变。因此,通过在运行阶段设置预警阈值,可以更准确地检测到提升机存在的问题,并及时采取措施对其进行维护和修复。
另外,在设置预警阈值时,笔者还需要考虑提升机所处的环境和工况,以便更好地调整预警阈值,提高预警系统的灵敏度。
部分参数运行预警阈值如表2所示。
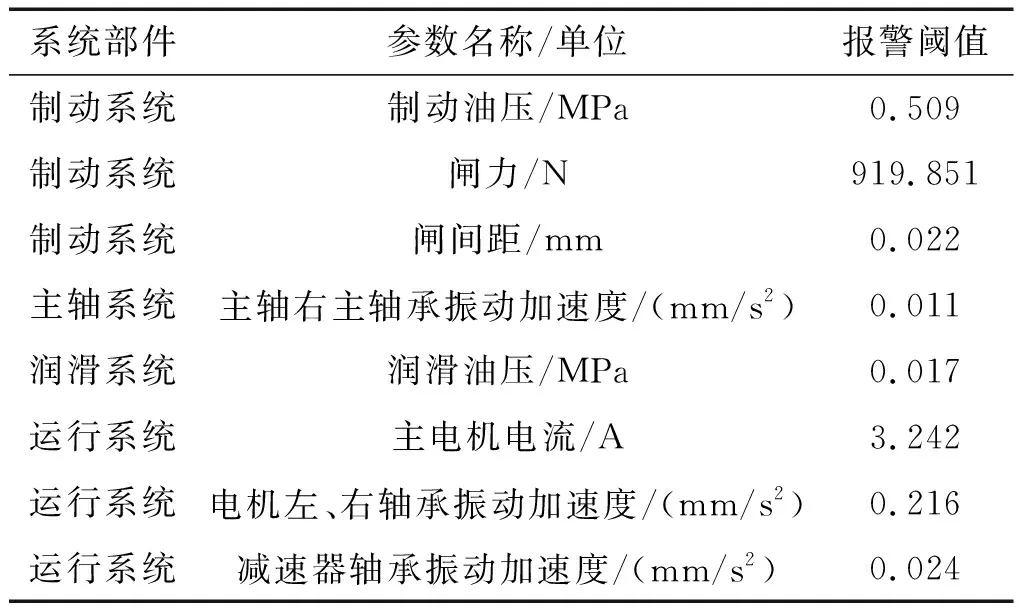
表2 部分参数运行报警阈值Table 2 Operational alarm thresholds for selected parameters
针对多故障并存现象,在使用LSTM-Adam模型对提升机故障进行预测时,笔者可以根据故障类型的不同设置不同的输出变量,构建多目标预测模型。同时,针对每种故障,可以单独设置对应的阈值来进行预测,并根据每种故障的预测结果,给出综合判断和预警信息,以确保模型在预测多种故障情况下的准确性。
4.2 实验验证
笔者选择2JTP-1.2型提升机作为试验台,对所搭建的提升机故障预警模型进行验证。
试验台如图5所示。
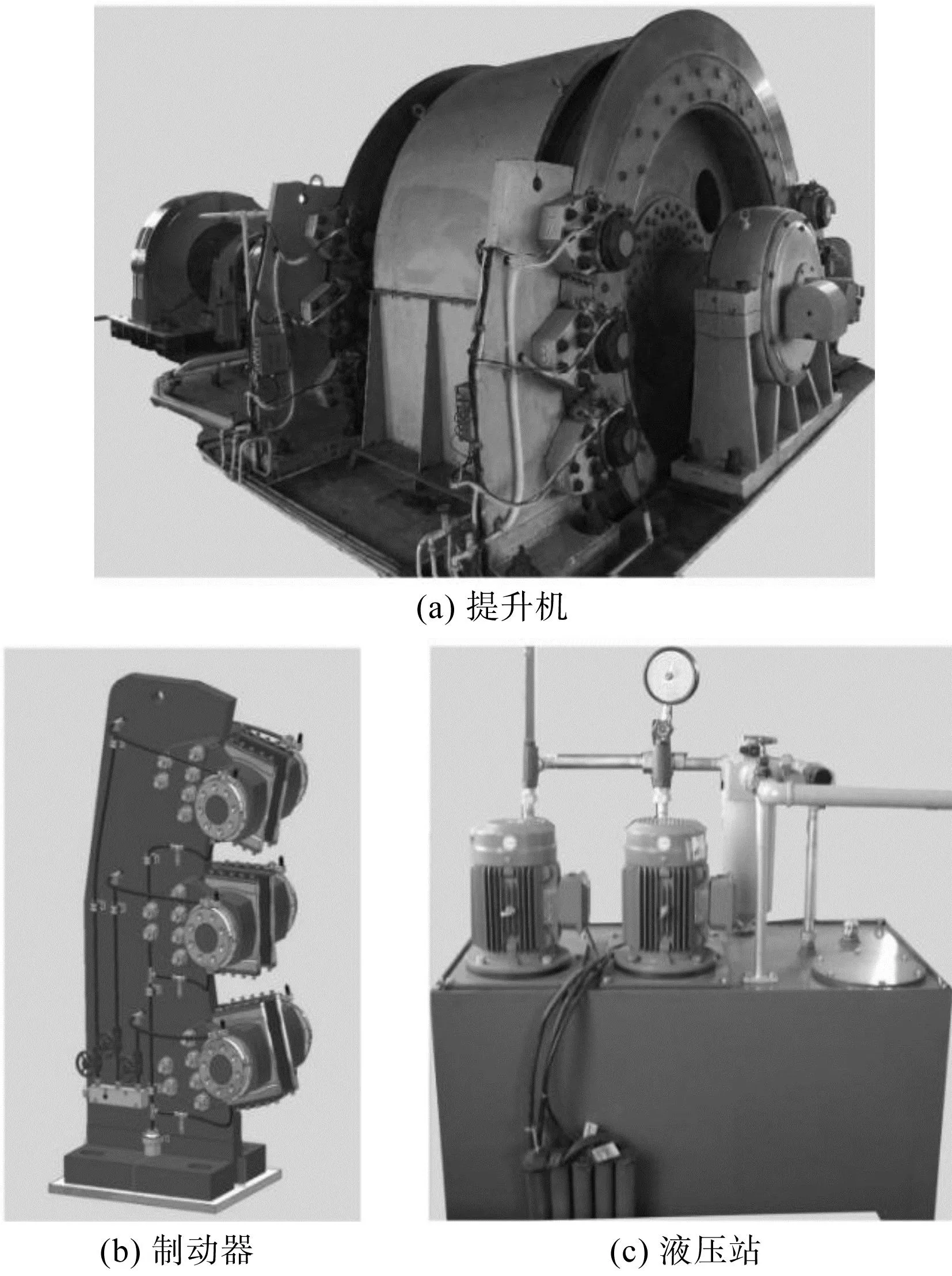
图5 提升机实验平台Fig.5 Experimental platform for hoist
该试验以制动系统故障为例。
首先,将采集的制动油压参数输入到已训练完成的预测模型中,得到相应的预测结果;随后,取滑动窗口大小为100,随着时间的推移,依次求得窗口内数据的比例均值,若误差大于故障预警阈值则发出警告;将正常运行状态下提升机的运行数据接入LSTM-Adam预测模型,并对所得数据进行残差分析。
残差分析结果如图6所示。
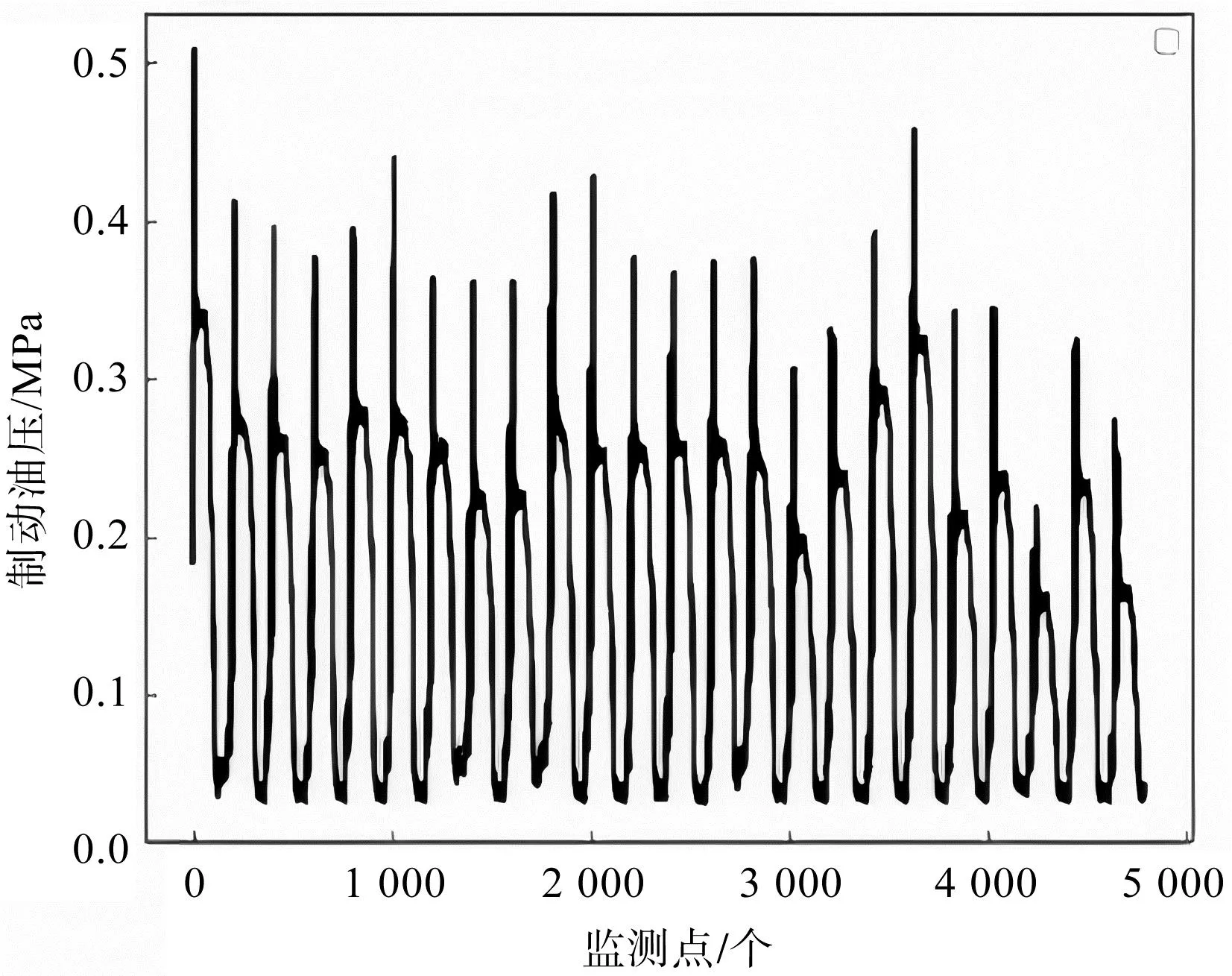
图6 正常状态运行数据残差Fig.6 Residuals from normalstate-run data
由图6可知:设备正常运行状态下,模型预测的残差最大值为0.509,因此设定报警阈值为0.509。
为了验证预警模型的正确性,笔者对实验室提升机制动系统进行故障模拟。笔者采用改变闸瓦间隙、提高制动器油温、更改系统残压和更换故障液压泵等方法来对制动系统故障进行模拟,并将采集到的数据存储到故障数据库中;从故障数据库中提取部分数据导入预警模型得到预测残差,并对预测残差进行滑动均值处理,最终得到故障预警图。
预警图如图7所示。
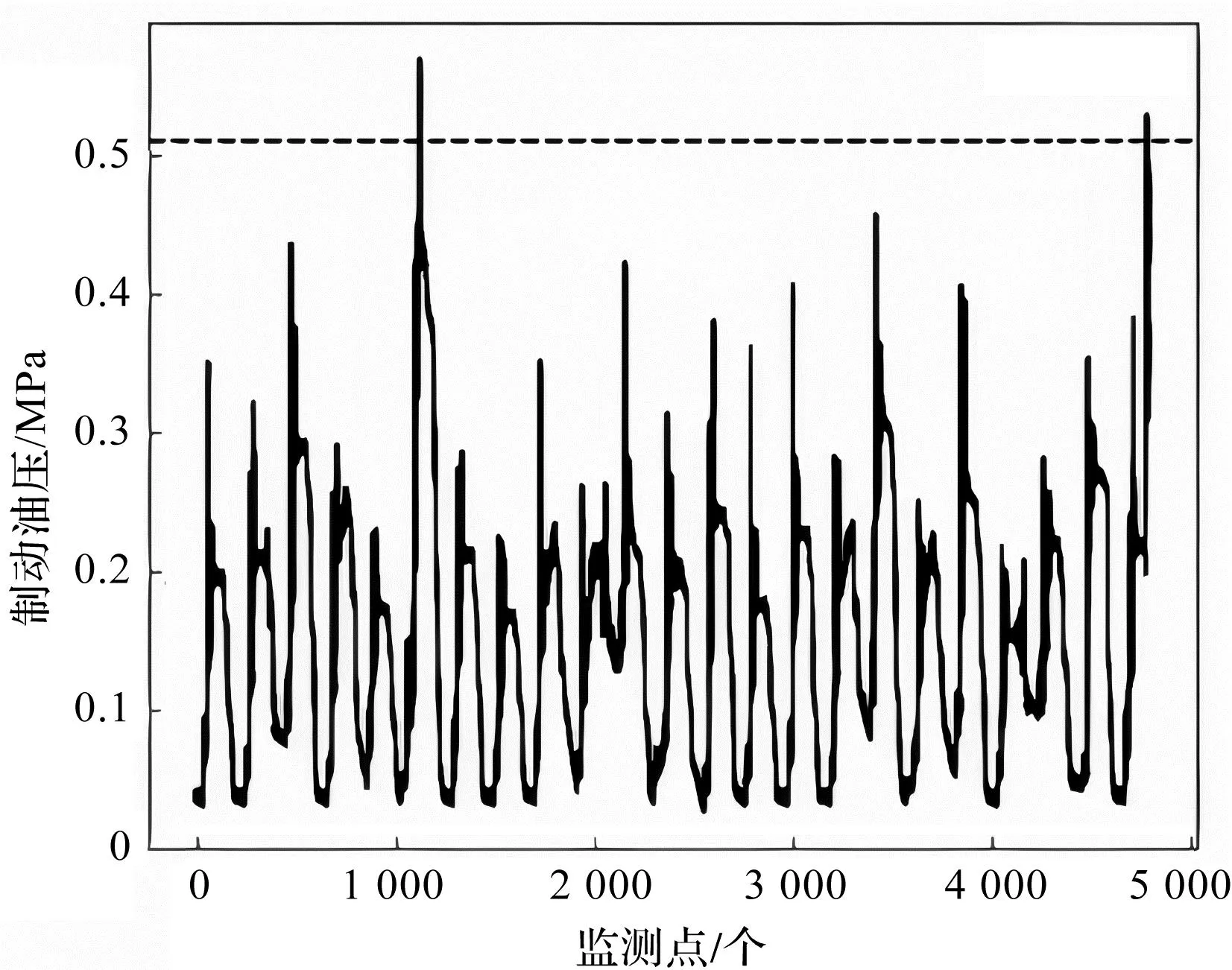
图7 预警图Fig.7 Early warning map
由图7可知:在1 125个监测点处,残差出现异常并超出报警线,随后恢复正常。
拟合图如图8所示。
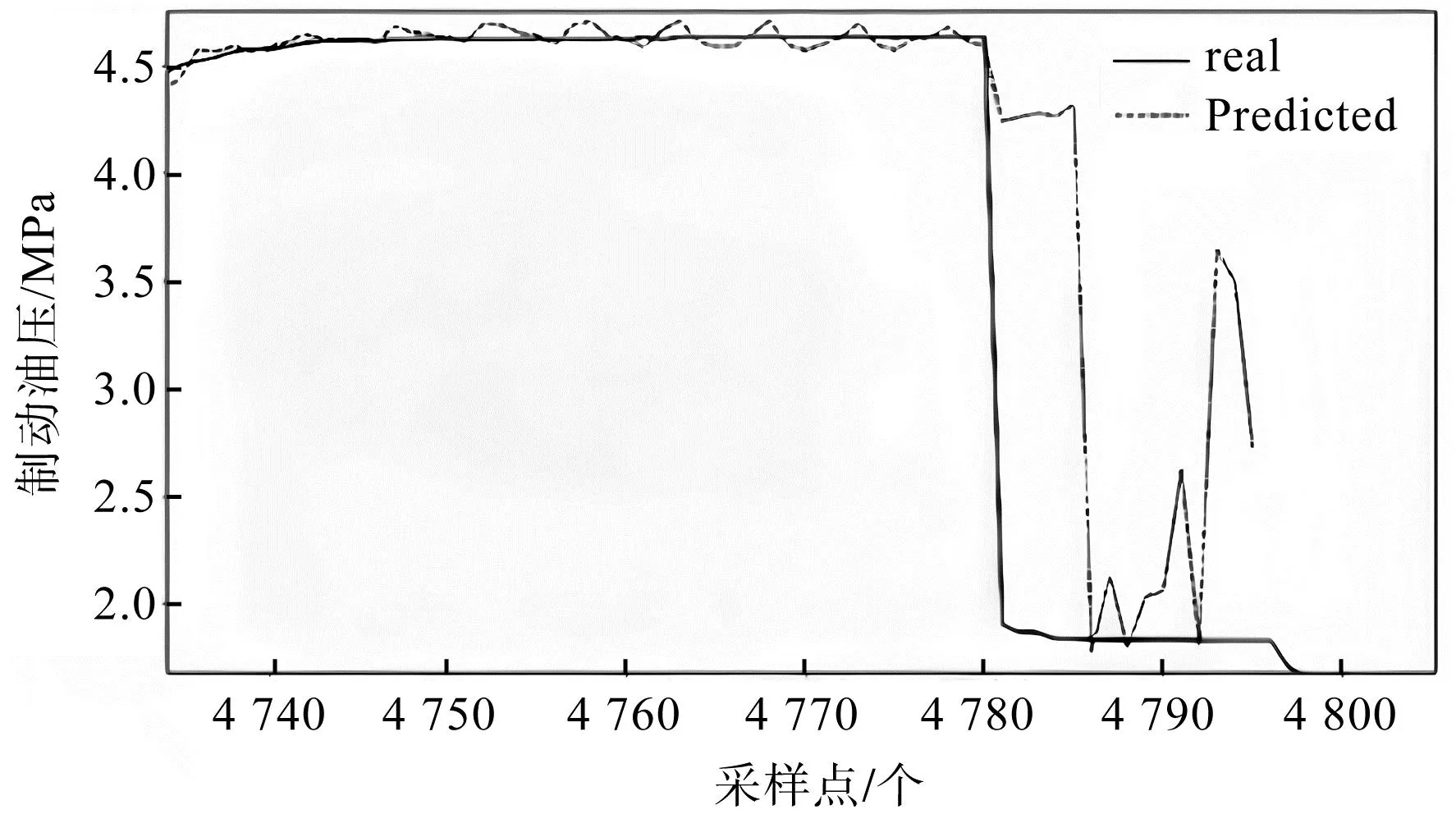
图8 拟合图Fig.8 Fitted graph
由图8可知:在4 781个监测点处出现报警情况,此时制动油压发生骤降。根据常见故障形式的分析,制动油压过小可能导致制动力矩不足、制动器敞不开闸等故障,严重威胁了矿井作业安全,引起这些故障现象的原因可能是油温过高或液压泵故障。因此,该模型能够准确做出预警,有效地避免故障情况的进一步加重和故障事故的发生。
当提升机出现故障后,会导致监测数据发生异常或系统状态发生变化,这些异常会导致预测值与真实值之间存在较大误差。因此,当提升机出现预警后,需要根据情况及时停止故障机器的运行,查找和排除故障,避免故障危害的进一步扩大。
5 结束语
针对矿井提升机的故障预警问题,笔者提出了基于LSTM-Adam的矿井提升机故障预警模型。
首先,笔者以LSTM模型为基础,并结合Adam优化算法对其进行了训练和优化;然后,采用滑动加权均值法对预测残差进行了分析,确定了多个特征参数预警阈值;最后,以制动系统故障为例,采用故障模拟实验对其有效性进行了验证。
研究结论如下:
1)提出了基于LSTM的矿井提升机参数预测模型,并结合Adam算法对该模型进行了训练和优化。经验证可知:当预测模型的学习率设定为0.015时,训练效果最优,模型的损失率为0.12%,且该模型能够准确地预测主电机电流的变化趋势;
2)采用滑动比例均值对预警残差进行了分析,得到制动油压的报警阈值为0.509。根据某矿提升机实际运行数据进行了试验验证。试验结果表明:基于LSTM-Adam的故障预警模型能够用于对提升机故障现象及时做出预警。
下一阶段,笔者将针对矿井提升机多故障并存的现象,继续进行深入研究和探讨。
