基于模糊控制的上肢康复机器人变导纳控制
2024-01-22高建设刘陆骐李雪晓丁顺良高亦阳
高建设, 刘陆骐, 王 杰, 李雪晓, 丁顺良, 高亦阳, 王 轩
(1.郑州大学 机械与动力工程学院,河南 郑州 450001;2.安阳鑫盛机床股份有限公司, 河南 安阳 455000)
脑卒中是当今中国社会中老年人多发的一种疾病[1],大脑功能受损使人体丧失肢体运动能力。末端牵引式康复机器人能够通过外部构件牵引脑卒中患者完成肢体康复运动[2],其结构简单、适用范围广、安装固定,不仅适用于大型医疗康复中心,还适用于家庭小空间环境[3]。末端牵引式康复机器人在带动患肢康复运动时,会根据交互系统的柔性产生不同的人机交互力,交互力的大小影响着患者康复的效果和安全。患者在康复初期因自身无法自如地控制肌肉收缩[4],无法自主运动,康复过程中往往会产生过大的力,此时应使康复系统尽量柔顺,保障康复安全;在康复中后期,患者具有一定的肌肉伸缩控制能力,为了帮助患者进行精细动作和肌肉的恢复,此时康复机器人应具有一定的刚性[5]。适度的柔顺性不仅能够提高患者康复训练的积极性和效率,同时能够在训练中防止产生过大的交互力从而保护患者的安全。柔顺控制一般通过构建理想的惯性-刚性-阻尼的二阶模型来调节其柔顺性:通过构建交互力与追踪误差的期望动力学方程,进而调节模型参数,调整康复机器人的柔顺性和人机交互系统刚度,已在上肢康复机器人领域广泛应用[6]。柔顺控制根据控制输入与输出关系的不同,可以分为阻抗控制和导纳控制[7]。Bai等[8]提出了一种自适应模糊阻抗控制方法,可消除康复训练过程中不确定性对系统的影响,使非线性控制系统具有较强的鲁棒性和适应性。Sado等[9]提出了一种自适应混合阻抗控制,通过在线估计受损肢体的阻抗分布,使用离散事件系统(DES)框架通过任务空间和患者阻抗曲线确定合适的阻抗参数。但阻抗控制需要基于阻抗模型和机器人系统的精准动力学建模直接计算电流/扭矩进行控制,需要伺服电机开放电流环,开发成本较高。
相对于阻抗控制,基于位置控制的导纳控制实现过程简单、成本低,且无须伺服驱动开放电流控制,应用开发较为方便。导纳控制按照控制过程中模型参数是否自动变化可分为固定参数导纳控制[10]和变参数导纳控制。吴青聪等[11]提出了一种模糊滑模导纳控制策略,对比研究了固定导纳参数模型中大中小3种导纳参数对康复训练结果的影响。但实际康复过程中,固定参数导纳控制模型需要人工调节以获得合适的柔性,较为烦琐。变导纳模型控制策略通过改变导纳参数进而调节柔顺性[12]。但如何将患者的需求感知量化,通过调节导纳模型的参数调节柔性,优化康复训练仍需要进行研究。乐宇倚等[13]提出了一种基于经验的变导纳控制的柔顺控制方法,基于人机交互力、跟踪力矩和自由力矩的基准值的差别构建数学关系调节阻尼。该方式虽然调节了系统的柔顺性,但只考虑了系统的安全性,例如在康复晚期患者具有一定肌肉伸缩控制能力时,康复机器人需要保持一定刚性,该变导纳策略无法实现。不同患者或不同康复阶段有着对机器人柔顺性的不同需求,单一的数学规则很难完善,而模糊控制常用于处理此类规则复杂的问题。梁旭等[14]设计了一种基于变参数导纳控制的外骨骼下肢康复机器人,其中模糊控制根据人机交互力和外骨骼姿态的变化调节导纳模型参数。但对于上肢康复机器人,该策略不够完备,仅仅依靠人机交互力的大小无法描述康复患者对柔顺性的准确需求。Li等[15]利用模糊控制基于追踪误差及其变化率设计了康复机器人的不同模式(负载、助力、安全模式)的虚拟力,依据虚拟力和固定导纳模型参数产生修正轨迹进行康复训练模式的切换,从而保证康复效率和安全。但该方法仅适合用于点到点的移动,在给定包含时间序列的康复轨迹时,无法从追踪误差及其变化速率判断患者的需求。
综上所述,现有上肢康复机器人柔顺控制的研究在结合实际康复需求时存在不完备的问题:固定导纳控制无法满足不同康复患者或阶段的需求;单一数学关系难以完善导纳控制参数变化;现有模糊控制规则结合实际康复需求并不完善。针对上述问题,本文基于自主研发的一种串并混联[16]上肢康复机器人[17],从实际康复需求出发,制定明确的模糊规则,并提出了基于模糊规则的导纳控制策略,用人机交互力误差及其变化速率作为模糊控制的输入,通过设计的规则来调节导纳控制模型中的自然频率达到机器人柔性的调节,以适用于各个阶段的模糊规则为康复机器人提供具有针对性的决策,并通过模拟康复训练实验分析了控制策略对训练过程中轨迹偏差的影响,从人机交互力的结果分析,验证了该上肢康复机器人控制策略在康复安全和效率上的提升。
1 上肢康复机器人系统
本文研究对象是自主研发的一种串并混联上肢康复机器人,其结构如图1所示。该机器人具有3自由度,为了使患者握持手柄时更加灵巧,在设计末端手柄时使其能够在UV平面上转动。患者在进行康复训练时,端坐于康复机器人龙门架下方,手臂上举拉住机器人末端手柄位置。U轴和V轴连杆通过并联,共同带动患者手臂在其所确定的平面中运动,再与Z轴串联,机器人的末端手臂便能够带动患者手臂在三维空间中沿预设轨迹进行运动,从而刺激患者特定肌群,较大程度地活动患者肩关节和肘关节,达到康复训练的目的。
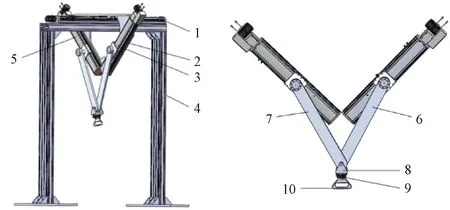
1—Z轴滑台模组;2—V型支撑架;3—U轴滑台模组;4—龙门架;5—V轴滑台模组;6—U轴连杆;7—V轴连杆;8—力传感器连接件;9—力传感器;10—末端手柄图1 上肢康复机器人三维模型图Figure 1 3D model of upper limb rehabilitation robot
在进行康复训练时,根据康复治疗师提供的训练路径,需要进行运动学反解。因此应首先分析机构运动学。该机构是由U、V两轴的2-PRR并联结构与Z轴耦合而成,应先将Z轴与2-PRR并联结构解耦,将上肢康复机器人末端运动分解为U、V两轴所在的平面运动和Z轴方向上的运动。先分析U、V两轴所在的平面运动,再与Z轴方向上的运动耦合。
上肢康复机器人机构简图如图2所示,以U、V两轴交点为坐标原点,水平方向为x轴,竖直方向为y轴建立坐标系。其中,OB1的长度为d1,OB1与水平面的夹角为α1;OB2的长度为d2,OB2与水平面的夹角为α2;CB1的长度为l1,CB1和水平面的夹角为β1;CB2的长度为l2,CB2和水平面的夹角为β2。
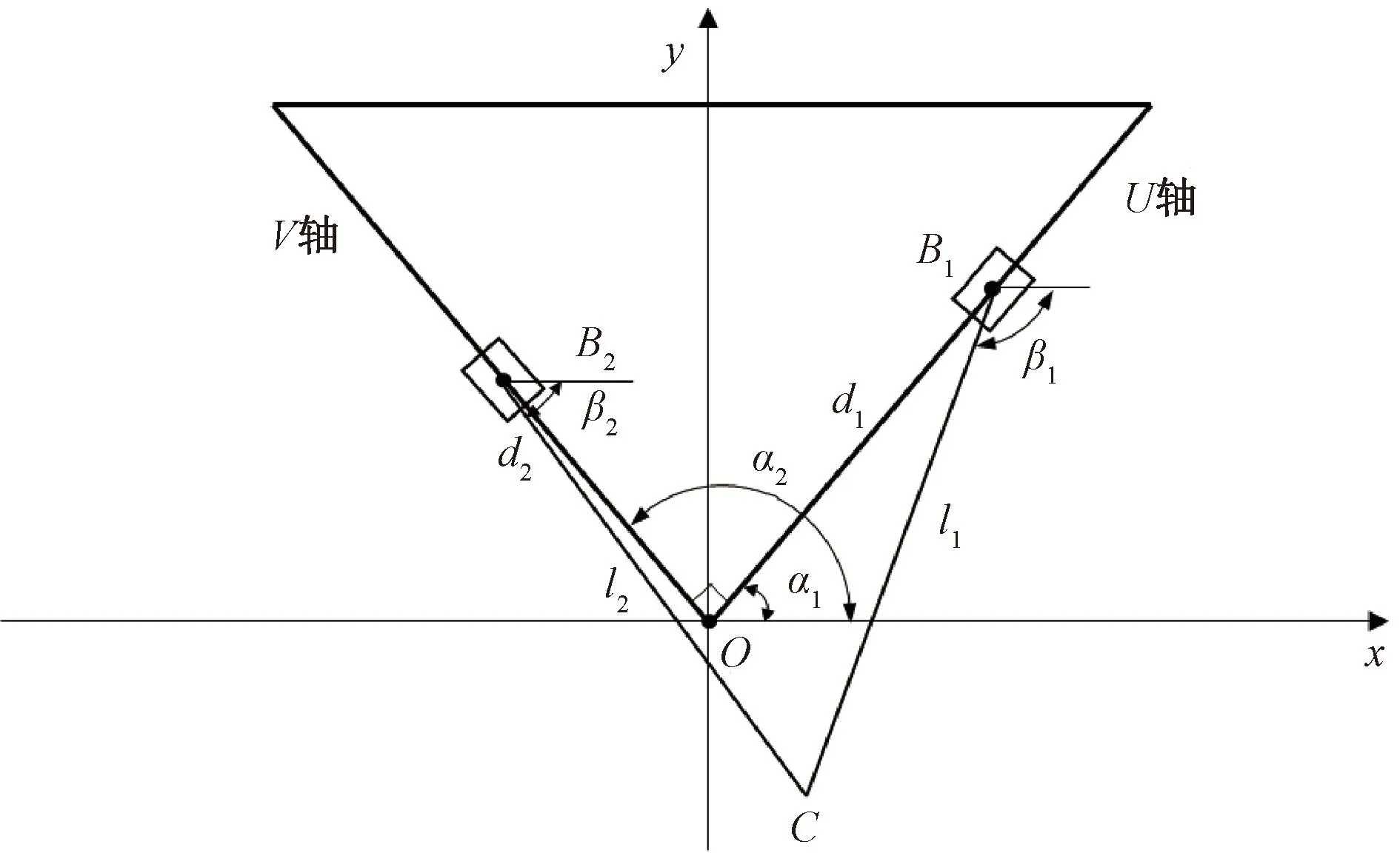
图2 上肢康复机器人机构简图Figure 2 Schematic diagram of the upper limb rehabilitation robot
由图2中几何关系可得
(1)
式中:i=1,2(下同)。
对式(1)进行数学变换,可得两个滑块在坐标系中的运动学逆解为
(2)
式中:
(3)
因di表示滑块到原点的距离,则di≥0恒成立,故
(4)
由式(1)又可得到βi与机器人末端坐标的关系:
(5)
2 基于模糊控制的变参数导纳控制
2.1 固定参数导纳控制
上肢康复机器人在康复训练中通过末端手柄带动患者手臂运动时,需要采用柔顺控制策略,以防止手臂在做跟随运动或牵引运动时由于人手和末端手柄之间作用力过大而对手臂肌肉造成损伤。导纳控制框图[18]如图3所示,训练过程中,手柄和机器人末端通过力传感器连接,实时检测患肢和末端手柄之间的作用力f,并通过力反馈的方式实时更新机器人末端运动路径。其中追踪的新路径通过逆运动学来进行位置控制。这种方式可以有效锻炼患者肌肉,同时保证机器人末端执行器运动轨迹的平稳性,避免因患者肌力不足或疲劳而产生抽搐时对患者造成二次伤害。
其运行过程中Xr、Xd、Fr及Md、Bd、Kd都是包含(x,y,z)3个方向的三维向量,在实际训练中每一个自由度都是解耦状态,可根据单个自由度进行分析,因此本文基于单轴方向为例进行分析。式(6)为导纳控制方程。

(6)
式中:xe为基于笛卡尔空间末端执行器位置偏差,xe=xr-xd,xr为康复医师基于康复专业知识设定的康复轨迹,xd为期望位移;md为质量系数;bd为阻尼系数;kd为刚度系数;f为力传感测得的人机交互力;fr为导纳模型输入的力偏移量,其目的是在控制柔顺度的同时产生一个力偏移,通过调节fr来调节康复训练的负载,使患者以给定的力目标进行康复运动[13]。若fr=0,则系统可视为简单的柔顺控制;若fr过大,实际训练过程中因患者无法提供较大的力,运动路径会较多地负向偏移且柔顺性较差;若fr过小,实际训练过程中刚性较小,会使运动路径产生较大偏移,造成康复效果不理想。
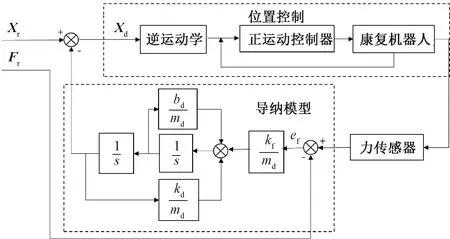
图3 导纳控制框图[18]Figure 3 Admittance control block diagram[18]
2.2 变参数导纳控制
在康复中,人机交互需要的导纳模型是实时变化的,且人的受力动力学模型不易直接测量。因此,固定的导纳参数通常不能适应不同患者上肢患病情况,需要针对不同患者的实际情况设计针对性康复训练。现有部分研究[16-17]以人机交互力的大小变化为基准设计了基于模糊控制的变导纳控制,但实际康复训练中,人机交互力的变化率代表着患者的肌肉快速控制能力,更能反映患者肌力的强弱。
本文设计了基于模糊控制实时改变导纳系数的控制策略来实时调整在人手和末端手柄之间的作用力,如图4所示。其中人机交互力通过六维力传感器测得,其变化速率通过双向微分法计算求得,并采用二阶IIR(infinite impulse response)数字滤波器巴特沃斯滤波器(Butterworth filter)进行滤波[19],再将人机交互力误差和力误差的变化速率作为模糊控制系统的输入,采用模糊准则来实时调节导纳控制参数[20],使得在康复训练过程中能够实时输入一个理想的导纳控制参数,从而达到最佳康复效果[21]。
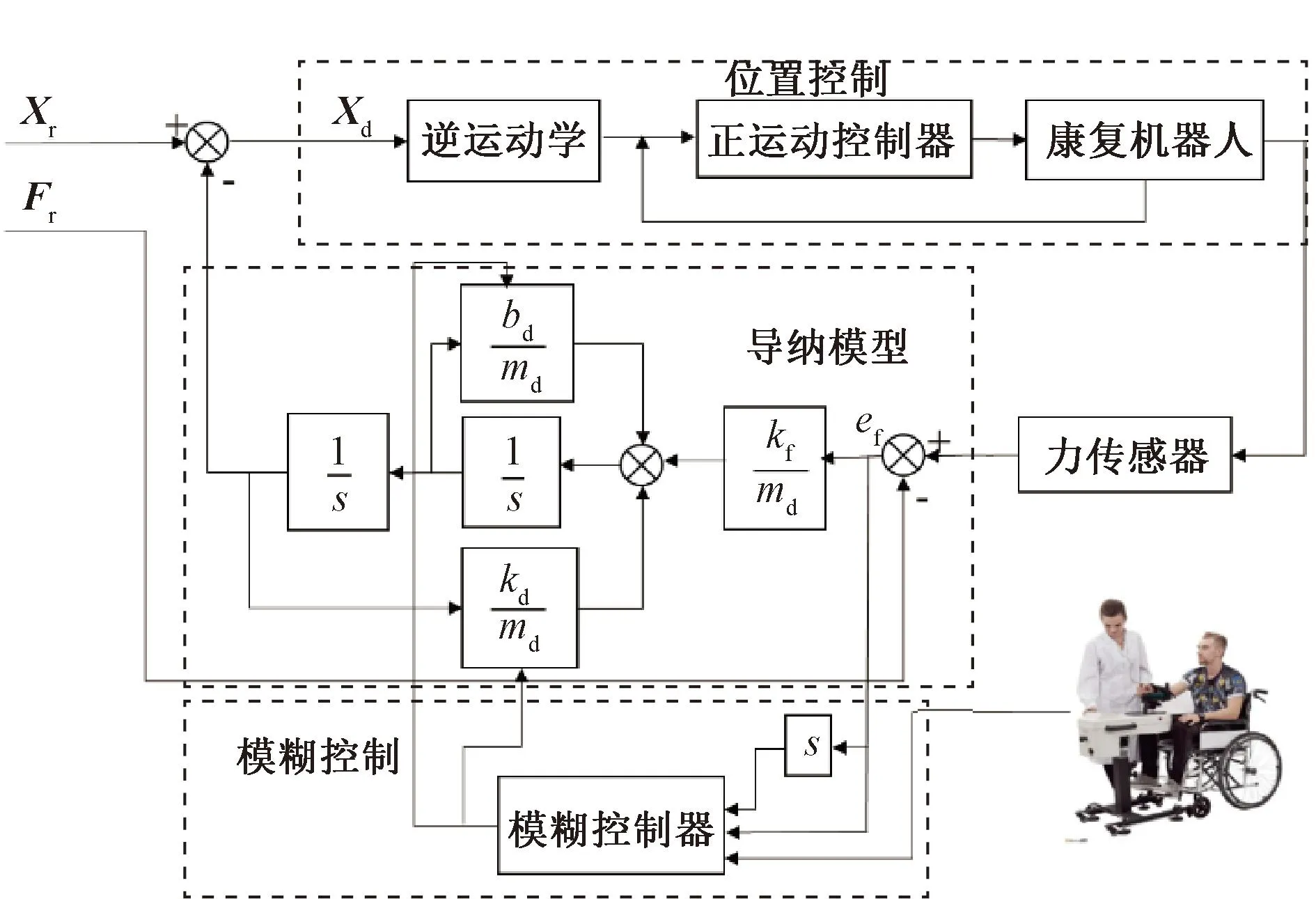
图4 基于模糊控制的变导纳控制框图Figure 4 Fuzzy admittance control block diagram

(7)

2.3 模糊控制
对于自然频率ωn的调节需要根据康复专业知识基于模糊控制进行调节,从康复实际出发基于以下原则:康复训练中当患者在偏离给定路径时,机器人系统刚度应增大;反之,机器人系统刚度应减小。同时在康复训练中还必须注重安全性,保护患者免受二次伤害。相较于传统导纳控制策略,基于模糊控制实时改变导纳系数的控制策略恰好适用于以上要求。
在实际的康复训练中,患者随机器人末端运动存在以下两种极限情况:一是正常人能够以给定力跟随运动,故机器人系统应提供较大的刚性,以提高训练强度;二是对于肌无力患者不能完成康复运动,机器人系统应较为缓慢地追踪给定路径。从人机交互力误差来考虑,在力误差最大时,说明患者肌力不强,自然频率ωn应取较小值,机器人系统具有更大的柔顺性;在力误差最小时,说明患者肌力能够跟随期望力,自然频率ωn应取较大值,机器人系统具有更大的刚性。对于不同患者,在康复过程中会在某一时刻产生相同的力误差但肌力不同,力误差变化率必然不同,因此,还需要通过力误差的变化率调节导纳参数。患病程度轻的患者肌力强,则力误差变化率大,能以较大的刚性进行训练,故应采用较大的导纳参数;患病程度重的患者肌力弱,力误差变化率小,应以较大的柔顺性进行训练,故应采用较小的导纳参数。本文通过力误差和力误差变化率两个参数指标来调整导纳参数,既能保护患者,又能针对不同患者的患病程度实时调整导纳参数以达到期望的康复效果[23]。
针对以上分析,模糊规则制定如下。


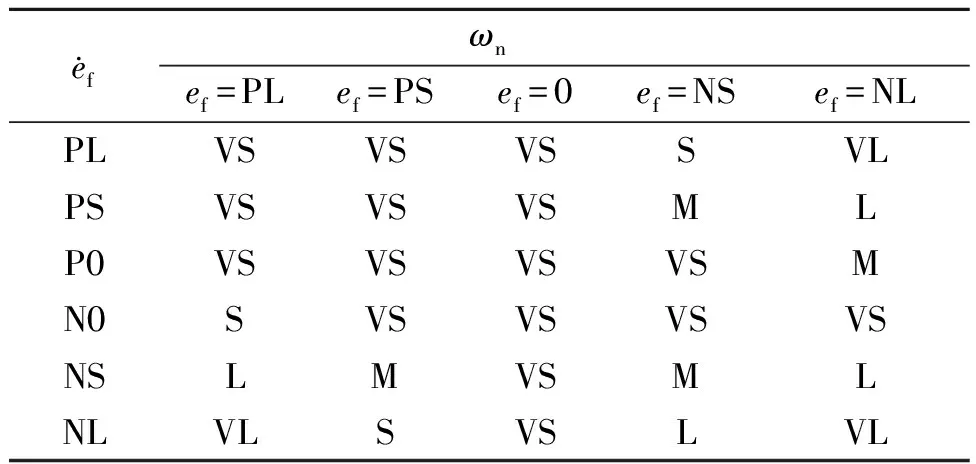
表1 模糊规则表Table 1 Fuzzy rules
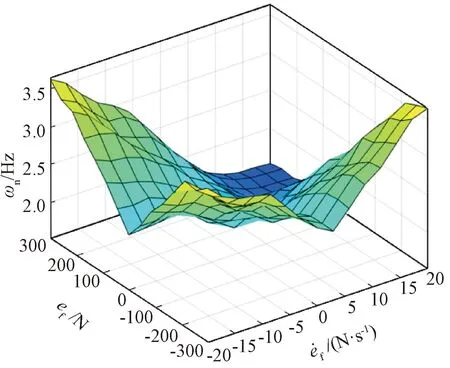
图5 模糊推理输入/输出关系曲面图Figure 5 Input/output relation surface of fuzzy inference
3 仿真与实验验证
3.1 仿真分析
为了验证基于模糊控制的变导纳控制策略的可行性,在Simulink中进行了仿真研究(图6),仿真假设机器人为简单的一自由度质量弹簧阻尼二阶系统,康复运动轨迹为单一轴的振幅y=1 m、频率为0.01 Hz的正弦波。设期望力fr=1 N。人机交互过程中,产生的相互作用力假设为简单弹簧模型即f=kex。
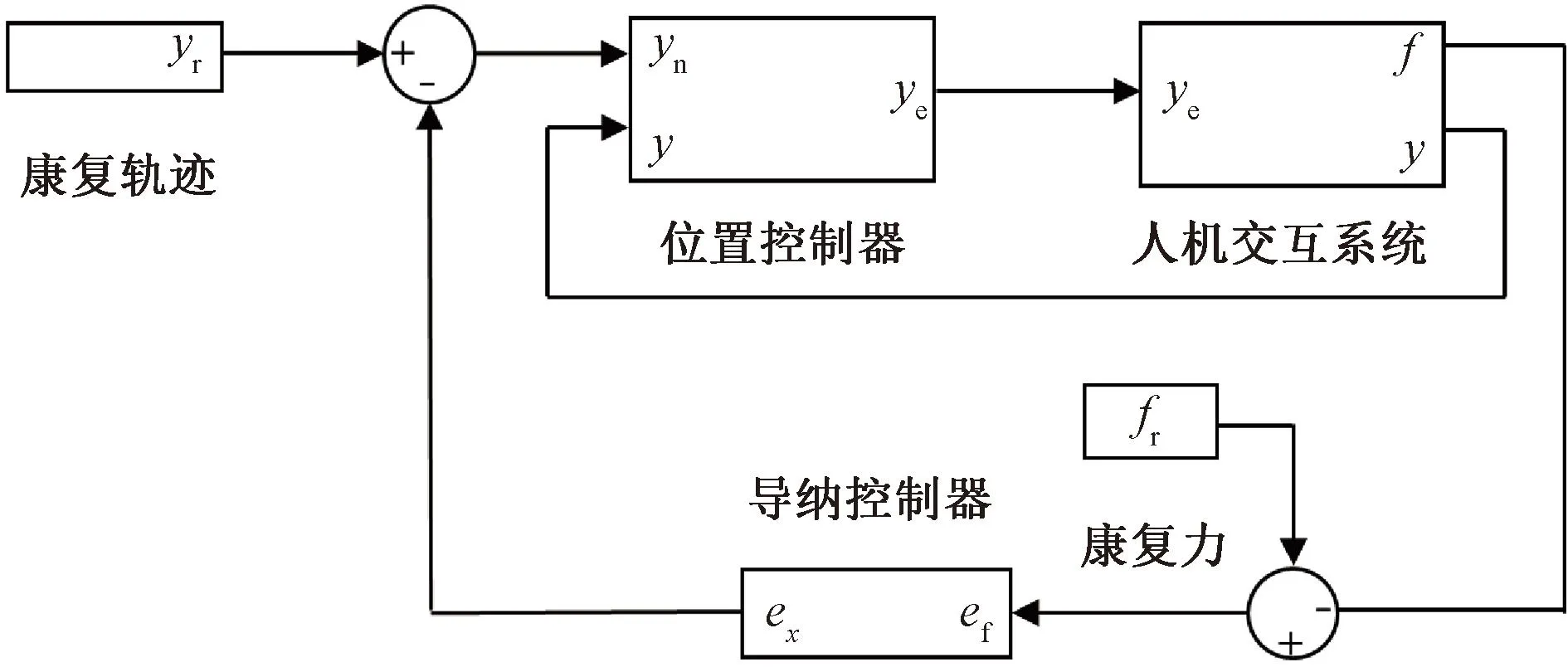
图6 基于模糊控制的变导纳控制仿真模型Figure 6 Variable admittance control simulation model based on fuzzy control


图7 MATLAB仿真结果Figure 7 Imulation results in MATALB
3.2 实验验证
为了研究本控制策略在实际康复训练中的可行性,本文通过设计模拟实验进行验证。实验基于上肢康复机器人平台,在正运动控制器ZMC432中实现了基于模糊控制的变导纳控制算法,计算新目标追踪轨迹xd的周期为10 ms,并通过位置控制实现机器人末端轨迹的追踪。硬件连接如图8所示。

图8 硬件连接图Figure 8 Hardware link diagram
对传统导纳模型和基于模糊控制的变导纳模型两种控制策略进行了对比实验。设计两组实验分别进行验证:实验一模拟了能够适应康复强度的患者从开始进行训练到进入稳定训练状态的肌力变化;实验二模拟了训练过程中康复运动轨迹超出患者能力承受范围而产生的力突变情况。实验现场照片如图9所示。

图9 现场实验照片Figure 9 Experimental site photo
在仿真中发现,运动过程中可能出现基于导纳控制获得的新轨迹速度过大的现象,实验硬件条件可能无法达到,还可能会对患者造成伤害,为满足实验要求,对运动过程中的速度进行如下限制。
将xes=ve、f-fr=ef代入式(6)得追踪速度ve为
(8)
由于vd=vr-ve,限定vd在±vp之间,采用tanh(·)函数:
(9)
通过对vd积分求得xd
(10)
实验一中,实验对象选择一名男性健康受试者,模拟受试者在刚开始运动和运动过程中肌力变化,分析力误差变化引起的自然频率变化对康复训练的影响。


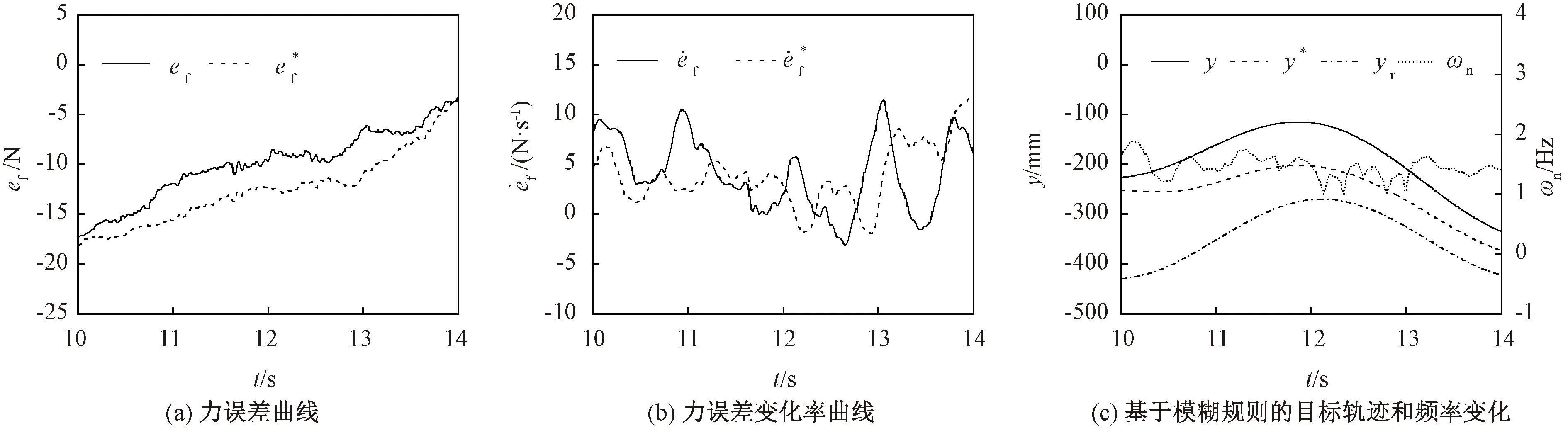
图10 能够适应康复强度的患者实验结果图Figure 10 Experimental results of patients with rehabilitative exercise capacity

4 结论
针对上肢康复机器人面对不同患者无法调整柔顺性的问题,结合实际康复运动情况,分析了康复过程中患者对康复强度的实际需求,基于模糊控制提出了一种更完备的变导纳控制策略,主要包含以下结论。
(1)提出了一种以人机交互力误差及其变化率作为模糊控制输入量,以自然频率作为控制量,利用模糊控制实时调节导纳参数的控制策略。
(2)所提出控制策略能够通过人机交互力及其变化率改变控制的柔顺性,进而提升康复的安全性和效率,这种动态调整的过程类似于医生主导的人工康复。
(3)仿真与实验结果表明,在患者可适应训练强度的场景中,相较于固定导纳模型,变导纳模型追踪给定路径时产生的冗余路径最多可降低56.13%,提高了康复训练效率;当康复运动轨迹超出患者可承受范围时,变导纳模型可提前0.5 s改变追踪路径,增强了康复过程中的安全性。
未来工作将在本研究的基础上开展实际康复临床实验,完善机器人辅助康复效果评价体系,对临床实验结果进行分析,发现问题并进一步提升康复机器人控制性能。
