基于多源遥感数据的植被冠层高度估算*
2024-01-21田镇朋袁敬毅刘小强POUDELKrishnaHIMESAustinRENNINGERHeidi王家新
田镇朋 周 维 袁敬毅 刘小强 叶 粟 POUDEL Krishna HIMES Austin RENNINGER Heidi 王家新 马 勤 ,2,3
1(南京师范大学地理科学学院 南京 210023)
2(南京师范大学虚拟地理环境教育部重点实验室 南京 210023)
3(江苏省地理信息资源开发与利用协同创新中心 南京 210023)
4(中国科学院植物研究所植被与环境变化国家重点实验室 北京 100093)
5(浙江大学环境与资源学院 杭州 310058)
6(密西西比州立大学林学系 斯塔克维尔 39762)
0 引言
森林是陆地生态系统的重要组成部分,在缓解全球/区域气候变化和调节全球碳平衡等方面发挥着巨大的作用[1]。作为描述森林垂直结构的重要参数,森林高度对估计森林碳汇、了解全球气候变化和生态环境管理具有重要意义。而冠层最大高度(Hmax)是森林高度的直接体现,与树龄、胸径、生物量等指标高度相关,所以精确估计冠层最大高度是研究生物量、碳汇、森林生长或扰动监测等方面的重要内容。冠层平均高度(Hmean)可以在一定程度上反映树木的垂直结构,发育良好的冠层预计具有较高的冠层平均高度,而随着下层和中层的增加,该值将降低[2]。传统上通过现场随机采样的方法测量冠层高度耗时耗力,容易受到交通、调查人员经验等多方面因素的影响,并且无法满足大面积冠层高度连续估计的需求[3,4]。被动光学遥感技术以更加低的成本获取大范围的影像,实现空间连续的地表观测,并结合实地测量数据,通过回归模型得到空间连续的冠层高度数据,这为绘制大面积连续的冠层高度提供了一种间接的方法[5]。但是,由于光通过森林冠层的穿透能力较弱,特别是在茂密或者具有多重冠层结构的森林区域,光学传感器的观测结果会表现出很强的饱和效应,从而导致冠层高度的估计精度降低[6,7]。尽管微波遥感的穿透力更强,但是其饱和效应对估算结果的影响仍然不可忽略。因此,如何更加精准绘制大范围连续的冠层高度,仍然是研究的重要问题。
随着近几年激光雷达技术的快速发展,其优点也越来越明显。激光雷达作为一种主动遥感技术,能够更好穿透森林冠层从而获得更加精准的森林三维结构信息[8]。因此,激光雷达已被广泛用于估算森林冠层高度。根据搭载平台的不同,激光雷达分为地基激光雷达、机载激光雷达和星载激光雷达三类。地基与机载激光雷达可以精确测量个体或林分水平的森林结构信息[8-10],但数据采集成本高,空间覆盖范围有限,难以实现全球或区域大范围的森林冠层高度测量[11]。相比于地基与机载激光雷达而言,星载激光雷达的测量方式为全球或区域大范围的森林冠层高度测量提供了方法。
本文使用ICESat-2 星载激光雷达数据中的地表和植被高度数据(ATL08),以高精度机载激光雷达冠层高度数据为参照,估算ICESat-2 离散足迹点冠层平均高度和冠层最大高度数据。结合光学遥感影像、地形、气候等辅助数据,生成空间连续的森林冠层高度分布图。进一步分析研究区内冠层平均高度和冠层最大高度的空间分布特征,揭示不同树种、地理区域以及人工林和自然林的冠层结构复杂度差异。
1 研究区域与方法
1.1 研究区域
美国密西西比州占地面积约为125460 km2,海拔高于平均海平面30~200 m。年平均气温为14~21℃,年平均降水量为1150~1650 mm,属于湿润的亚热带气候,雨水充沛,地势低洼,作物生长周期长。密西西比州森林覆盖面积占该州土地的62%以上,是美国东南部典型的林场,其中人工林区面积广阔,私有林占全州森林面积约88.6%,是美国退耕还林等措施和人工林固碳的主要试验地[12]。
1.2 数据获取及预处理
1.2.1 机载激光雷达数据与预处理
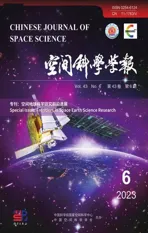
从美国地质调查局(USGS) 提供的公开可用数据可以获取2016—2018 年间的密西西比州范围内的机载激光雷达数据(ALS),样地大小有二种类型,分别为1 km×1 km 和1.5 km×1.5 km,样地的点密度约为6~8 m-2。由于无法获取实地的森林调查数据,所以从机载样地中随机选取了866 个(3%)样地作为验证数据(真实数据)。样地分布情况如图1 所示。
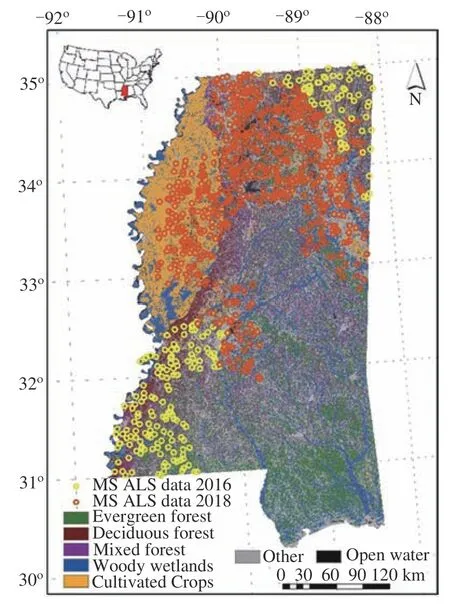
图1 密西西比州土地覆盖类型与机载激光雷达数据(ALS)样地分布(2016—2018 年)Fig. 1 Land cover types and airborne LiDAR sample plot distribution in Mississippi (2016—2018)
为了获取机载激光雷达数据的冠层高度,使用LiDAR360 软件** https://greenvalleyintl.com/?LiDAR360/对数据进行统一的处理,包括去噪、过滤、冠层高度模型的生成等步骤。去噪是为了除去在数据采集过程中受到飞行物(例如鸟类或者飞机)的影响引起的高位粗差,以及由测量过程中的多路径效应和激光测距仪的误差产生的低位粗差。通过检查一个点与其k个最近的相邻点的距离是否大于阈值(Davg+2Dstd)来识别机载激光雷达数据中的异常值(Davg和Dstd分别为点与其k个最近的相邻点之间距离的平均值和标准差)。过滤的目的是从机载激光雷达数据中区分出地面点,采用的是改进的渐进加密三角网滤波算法( Improved Progressive TIN Densification, IPTD)分类地面点[13]。使用克里金插值的方法生成1 m 空间分辨率的数字表面模型(DSM)和数字高程模型(DEM),冠层高度模型(CHM)则使用相应栅格的DSM 和DEM 的差值表示[14]。机载数据的冠层最大高度(Hmax)和冠层平均高度(Hmean)是以CHM 为依据计算的。冠层最大高度(Hmax)表示的是统计单元内所有栅格高度的最大值。冠层平均高度(Hmean)表示的是统计单元内所有栅格高度的平均值。最后使用ArcGIS Pro 软件,利用星载激光雷达数据建立的缓冲区(100 m×12 m)对冠层高度模型进行分区统计,获取冠层高度模型的最大值和平均值,用于模拟冠层高度并验证星载激光雷达冠层高度指标。
1.2.2 ICESat-2 数据获取与预处理
美国国家航空航天局(NASA) 2003 年发射了ICESat (Ice, Cloud and land Elevation Satellite),即冰云和陆地高程卫星,其主要有效载荷为地球科学激光测高系统(GLAS),是全球首颗对地观测激光测高卫星,极大地推动了全球范围内的森林冠层高度观测的发展[15]。但由于激光器故障以及其他多种原因,该星于2010 年2 月结束科学任务。随后NASA 在2018 年发射了星载激光雷达ICESat-2[16]。ICESat-2上搭载的先进的地形激光高度计系统(Advanced Topographic Laser Altimeter System, ATLAS)其主要目的是继续执行ICESat 未完成的观测任务,对极地冰盖、海冰高程变化及森林冠层覆盖进行长期观测[17,18]。ICESat-2 首次将单光子探测技术引入地球高程探测,极大地提高了对地探测的数据获取率。ATLAS 一共发射6 束激光脉冲,分三组平行排列,每组之间地表距离约3 km,组内2 束激光脉冲间隔为90 m,且为一强一弱,光束每 70 cm 生成直径小于17 m 的足迹,强弱光束能量比约为3∶1[19,20]。在研究中,从NASA 官网** https://search.earthdata.nasa.gov获取了2018 年10 月至2022 年11 月之间密西西比州的ICESat-2 ATL08 数据(第五版)。
尽管ICESat-2 ATLAS 传感器降低了对激光功率的要求并且提高了空间覆盖率,但是其测量结果容易受到背景噪声的影响[17]。ATL08 提供的光子数据已经根据官方提供的算法被分类为噪声、地面、冠层和冠层顶部等类别。从树冠和树冠顶部的光子中获取了一系列相对高度(Relative Height, RH)指标(包括RH75、RH80,RH85,RH90,RH95 和RH98 等)与无人机激光雷达获得的森林冠层高度进行了比较。为了确保ICESat-2 ATLAS 得出的森林冠层高度的准确性,用以下标准对ICESat-2 ATLAS 的足迹进行了过滤:(1)星载激光雷达冠层高度的相对不确定性应小于7(机载数据与星载数据的一致性随着星载数据不确定性的升高而降低);(2)最小森林冠层高度应大于3 m;(3)删除了最大冠层高度超过60 m 的足迹点。根据以上条件对数据进行初步筛选后保留967768 个ICESat-2 ATLAS 足迹(见图2)。
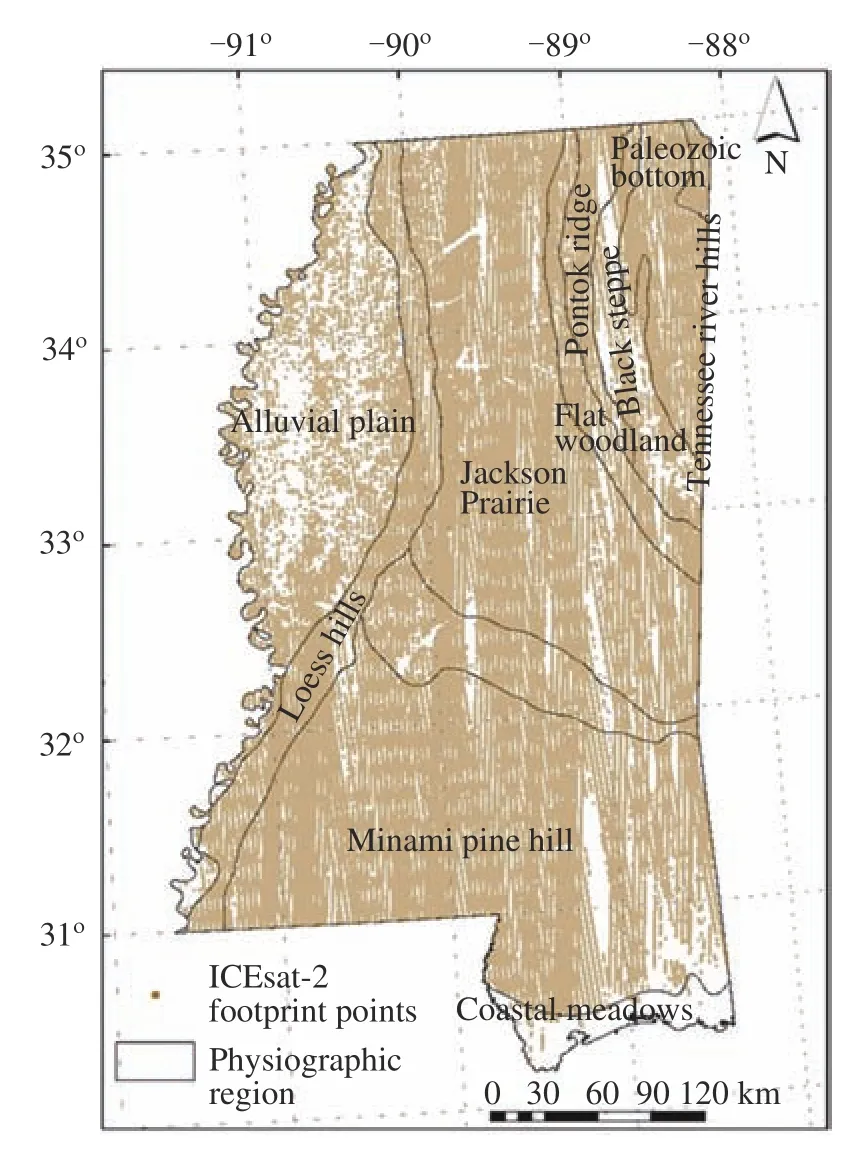
图2 密西西比州地理区域和ICESat-2 星载激光雷达数据足迹点分布(2018—2022)Fig. 2 Geographical division and ICESat-2 sample(2018—2022) distribution in Mississippi
1.2.3 辅助数据
为了绘制密西西比州连续的森林冠层高度图,搜集了地形数据、气候数据、土地覆盖数据、植被指数、扰动数据以及全球冠层高度数据。这些数据将用作机器学习模型的输入参数。地形数据是航天飞机雷达地形测绘任务的数字高程模型(SRTM DEM)中获取的[21],然后使用ArcGIS pro 软件从DEM 计算坡度、坡向和地形湿度指数。数字高程模型可以反映树木生长受海拔高程的影响。坡度和坡向主要反映了光照对树木生长的影响,向光性和向地性的相互作用可能会进一步影响森林生长[22]。1970—2000 年的WorldClim(2.1 版)数据** https://worldclim.org/data/worldclim21.html** https://landfire.gov/hdist.php*** https://www.mrlc.gov/data是由Fick 等[23]提供的1 km分辨率的全球月度天气数据,被用来提取气候特征。利用该数据集计算四个气候特征(年平均温度、季节性温度、年均降水量和季节性降水量)[7]。四种气候变量可以反映降雨、温度等气候条件对树木生长的影响。季节性温度和季节性降水量可以表述温度(降水)的变化Q,即
其中,Smonth和Mmonth表示所有月份温度或降水的标准差和平均值。
在遥感领域,植被指数是植被生长分析的重要参数,可用来观测植被的生长状况。归一化植被指数(NDVI)通过计算近红外波段和红波段之间的差异来定量化植被的生长状况,是反映植被绿度和密度的重要参数之一。使用谷歌地球引擎(Google Earth Engine, GEE)从Landsat8 影像计算NDVI 指数。为了减少云、阴影的影响,从2020 年的所有Landsat8 图像计算了一个最大值合成,并计算了生长季节(NDVI_rise: 4—10 月)和落叶季 (NDVI_drop: 1—3 月和11—12 月)NDVI 的平均值[24]。同样使用GEE 获取了另外的植被参数,包括归一化差分水体指数(NDWI)、归一化水气指数(NDMI)和归一化燃烧指数(NBR), 并且计算了2020 年NDWI 和NDMI 的最大值以及年平均值。NDWI 和NDMI 分别是利用绿光波段和近红外波、近红外与短波红外之间的差异来定量化反映植被的生长环境和植被冠层的水分含量情况。NBR 是通过计算近红外波段和短波红外波段的比值来表示受火灾扰动区域的特征信息,可以检测火灾对树木生长的影响。在本研究中选取了NDVI,NDWI,NDMI 和NBR 等植被指数。另外,从LANDFIRE 网站*** https://worldclim.org/data/worldclim21.html** https://landfire.gov/hdist.php*** https://www.mrlc.gov/data下载1999—2020 年的LANDFIRE 扰动图。该数据提供了从低到高的扰动严重程度的信息。研究中提取每年干扰地图(1999—2020年)的中、高严重地区,集合成1999—2020 年间最后一次扰动的时空分布图,计算了最后一次扰动距离2020 年的时间,作为森林生长时长(Rise Year)。由于森林生长时长是根据受到扰动后植被生长的时间来计算的,理论上来说时间与冠层高度呈正比。
研究中还参考了2019 年的全球冠层高度数据,该数据是使用GEDI 和多光谱Landsat 数据,利用机器学习算法生成30 m 空间分辨率的全球森林冠层高度图。该数据与GEDI 验证数据进行比较决定系数R2= 0.62,冠层高度均方根误差HRMSE= 6.6 m,与机载激光雷达数据比较R2= 0.61,HRMSE= 9.07 m。该数据对于研究区域森林高度具有指导意义[25]。
研究使用美国土地覆盖数据库(National Land Cover Database),该数据库是基于30 m 分辨率的Landsat 系列多光谱卫星影像制作的[26]。2019 年NLCD 土地覆盖数据从多分辨率土地特征联盟网站**** https://worldclim.org/data/worldclim21.html** https://landfire.gov/hdist.php*** https://www.mrlc.gov/data下载。在NLCD 的18 种土地覆盖类型中,主要研究土地覆盖类型中的4 种森林类型,即落叶林、常绿林、混交林和湿地森林。
1.3 研究方法
1.3.1 估算星载激光雷达足迹冠层最大高度和冠层平均高度
由于机载激光雷达测量的范围有限,而星载激光雷达可以大范围地获取测量数据,但是其精度普遍低于机载测量数据。并且不同数据来源,相对高度度量存在一定的差异。为避免这一问题,对机载激光雷达数据和星载激光雷达数据重叠区域的足迹进行分析,以求获取与机载激光雷达数据一致性最高的星载激光雷达数据冠层高度参数,并且分析星载激光雷达数据不同的数据获取条件对一致性的影响。在重叠区域随机选择测量数据的75%用作模型训练,以线性回归和多元线性回归分别建立模型,用于估计星载激光雷达足迹处的冠层最大高度和冠层平均高度,预留25%的数据用于模型验证。最终将建立的回归模型应用于所有星载激光雷达足迹,以计算所有足迹处相应冠层高度。本研究的具体研究思路如图3 所示。
图3 连续冠层高度图绘制流程Fig. 3 Continuous canopy height map drawing process
1.3.2 机器学习方法绘制连续的冠层最大高度和冠层平均高度图
机器学习技术,例如随机森林(RF)、支持向量机(SVM)算法通常认为是估算森林参数可靠的回归方法,已被应用于估算森林结构参数[27-30]。随机森林是一种基于决策树的、具有高容错性的统计机器学习方法,能够处理多源数据及高维样本,并且可以输出每个输入变量的重要性。随机森林算法主要参数有两个,即树的数量(Ntree) 和每次分裂中尝试的变量数(Mtry)。支持向量机基于二分类法,可处理高维数据,在特征较多时也能保持较好的分类性能,并且支持向量机回归便于使用,鲁棒性好,不易受输入数据噪声的影响。在研究中,使用了径向基函数核的支持向量机回归,径向基函数核是植被生物物理特性建模中最常用的函数[31],主要参数是惩罚因子(C)和核函数系数(Ggamana),惩罚因子越大表示整个优化过程中对于总误差的关注程度越高,核函数系数表示模型的复杂程度和泛化能力,数值越大复杂性越高,泛化能力越差(Ggamana可以设置为auto,使模型自动调节最适值)。研究中对比了随机森林算法和支持向量机算法的精度差异,其结果以及参数设置如表1 所示。最终选择了回归结果更好的随机森林方法,将冠层高度估计值从星载激光雷达足迹外推到整个密西西比区域。
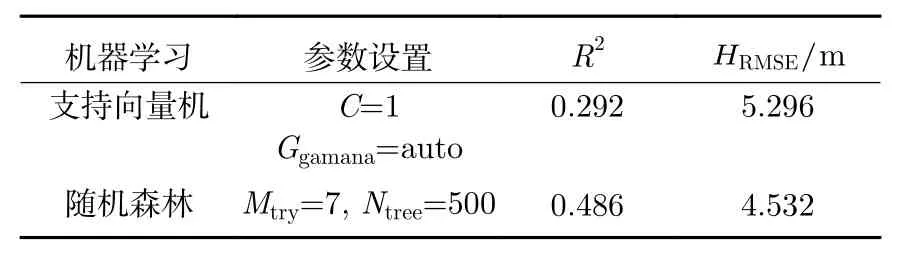
表1 机器学习回归方法对比和参数设定Table 1 Comparison and parameter setting of machine learning regression methods
在随机森林的算法中,每棵回归树通过装袋法随机抽取部分样本进行训练,其他未被抽取到的样本,将被用来检测模型的泛化能力。研究随机选取了75%的样本用于模型的训练,25% 用于验证回归结果。在训练过程中随机森林算法会并行处理多个决策树,每个决策树都会得出回归结果,最终结果将取所有决策树的均值。并且在训练的过程中通过特征置换评价自变量的重要性。总的来说,随机森林算法不需要对协变量的正态性做出假设,并且通过构建模型时引入随机性,来降低自变量之间的相关性。
使用地形、气候,覆盖类型、植被指数和生长年龄几类数据,来实现数据的外推。随机森林外推过程是使用Python sklearn 包实现的,模型有两个自定义参数,即树的数量(Ntree) 和每次分裂中尝试的变量数(Mtry)。这两个参数是通过人工检查确定的,包括500 个随机森林树,并在每个分裂中尝试7 个变量(参数设置如表1 所示)。利用所建立的随机森林回归模型,绘制了密西西比州连续的森林冠层高度图。并且通过参照土地覆盖数据集(NLCD),在非林地区域将树高设置为空值。
外推过程中使用的大量协变量可能导致随机森林算法过拟合。为减少这种可能性,进一步检查所有收集到的变量的重要性。结果如图4 所示,可以看出同一变量在冠层最大高度和冠层平均高度模型的重要性略有差异,但冠层覆盖度、参考树高和归一化水气指数都排在前列。最终随机森林回归模型中使用了前15 个变量。
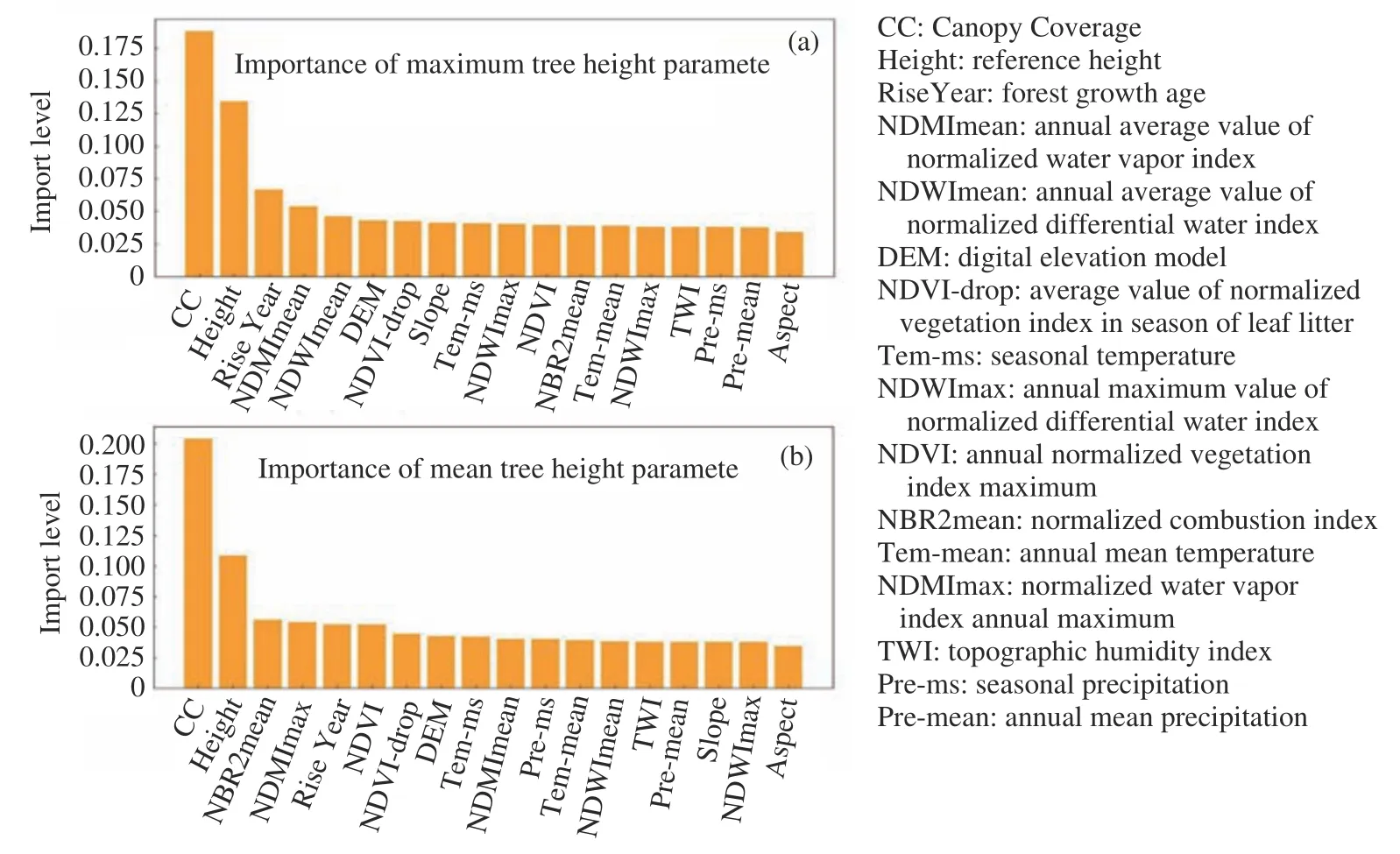
图4 随机森林模型中变量的重要性Fig. 4 Importance of variables in random forest model
1.3.3 精度评估
在评估机载激光雷达数据冠层最大高度、冠层平均高度与星载激光雷达数据相对高度的一致性时,使用了皮尔逊系数(r)、偏差(Bbias)、偏差百分比(Nbiasratio)、平均绝对误差(Mmae)四个参数。计算公式如下:
其中,n为样本数;xi为星载数据第i个样本的冠层高度值,为星载数据所有样本的冠层高度平均值;yi为机载数据第i个样本的冠层高度值,为机载数据所有样本的冠层高度平均值。
在评价连续冠层最大高度和冠层平均高度图的精度时,根据预留的测试数据集,可以利用决定系数(R2)和冠层高度均方根误差(HRMSE)评估模拟精度,计算公式如下:
其中,yi为第i个样本的真实值,为第i个样本的预测值,为所有真实值的平均值。
2 研究结论
2.1 机载数据与星载数据相对高度参数的一致性
由于数据源不同,相对高度指标会存在一定的差异。为了更好地估计星载激光雷达足迹点的冠层高度,更期望使用与机载冠层最大高度或冠层平均高度一致性最佳的星载激光雷达相对高度参数。在研究中,提取了星载数据和机载数据在研究区域内的重叠足迹,研究两者森林高度之间的一致性。首先评估了数据获取时间以及光束类型对星载数据与机载数据相对高度参数一致性的影响,发现夜间采集的数据质量优于白天采集的数据 (r提升了0.049,Mmae减少了0.416 m)。另外相比于弱光束,强光束采集的数据更好 (r提升了0.058,Mmae减少了0.811 m) (见表2)。
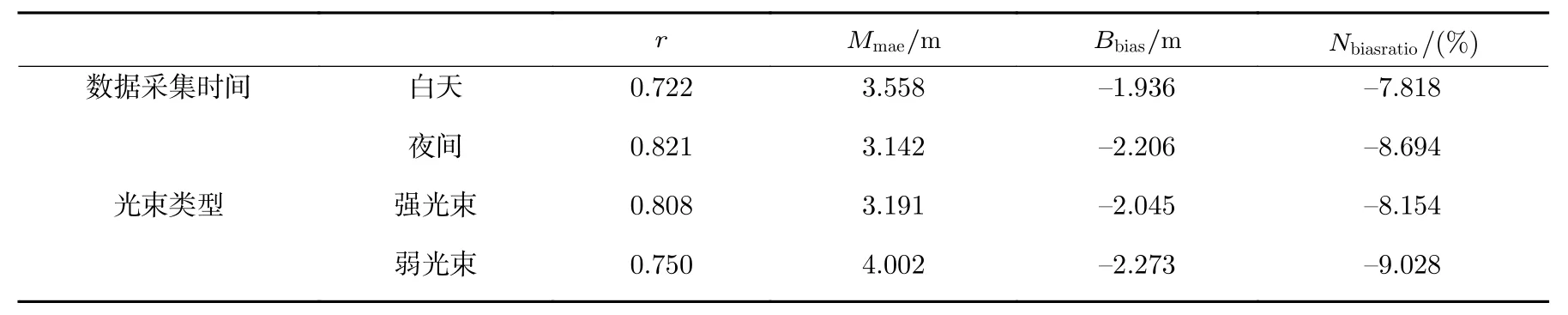
表2 星载数据不同获取数据条件下数据一致性的比较Table 2 Comparison of data consistency under different acquisition conditions
根据上述情况,对重叠区域的夜间强光束数据进行深入分析,发现ICESat-2 ATL08 数据的相对高度参数Hcanopy(即RH98)与机载激光雷达数据的Hmax参数的一致性最高,如图5 所示,r为0.830,Mmae为3.059 m。概率密度计算是利用高斯核函数将样本点进行叠加,然后在全定义域上建立概率密度分布函数,最后输入对应的坐标,就给出相应的概率密度,色条数值越大表示点越密集,以下散点密度图相同。
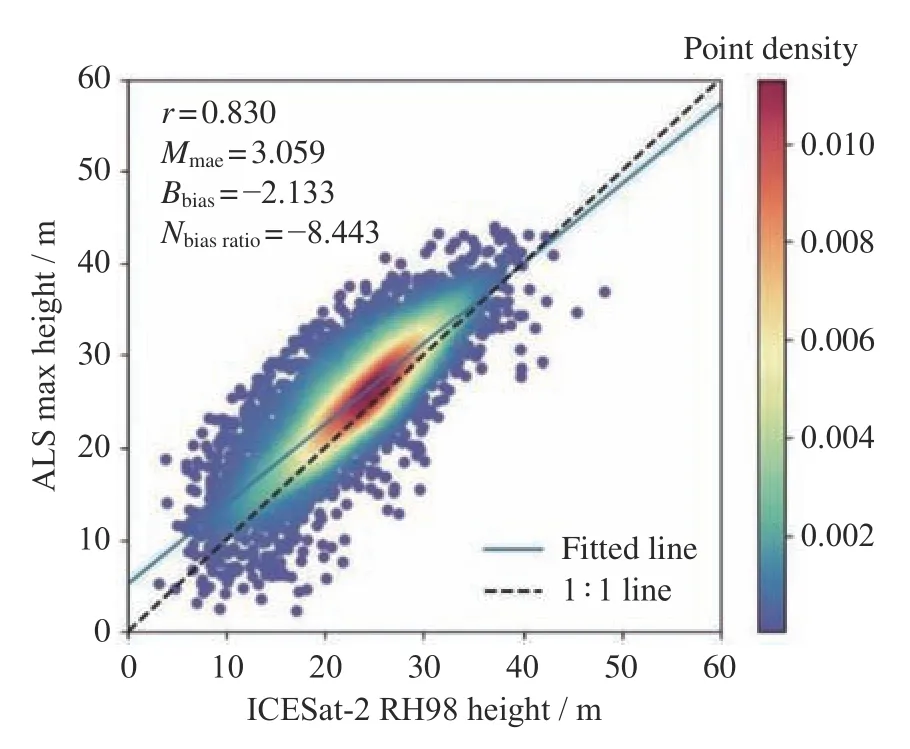
图5 机载与星载高度参数的一致Fig. 5 Consistency between airborne and spaceborne altitude parameters
2.2 ICESat-2 数据足迹点的冠层最大高度与冠层平均高度
ICESat-2 ATL08 数据虽然提供了一系列相对高度参数(包括冠层平均高度、冠层最大高度、冠层最小高度等)[32],但是相比于机载数据精度有限。因此,通过两者重叠区域的数据建立模型,进一步预测密西西比州的全部足迹点的冠层最大高度和冠层平均高度。使用重叠区域75%的数据利用线性回归的方法构建模型,25%的数据对模型进行验证。对比了针对不同森林类型单独建模和所有森林类型整体建模的模拟精度和回归方程。利用t-test 显著性检验,发现常绿林、混交林、落叶林和湿地森林四种不同森林类型间没有显著性差别,因此选择整体回归模型。四种森林类型的预测结果和散点图分布如图6 所示。

图6 ICESat-2 不同森林类型冠层最大高度建模散点图和拟合线Fig. 6 ICESat-2 Scatterplot and fitted line of maximum canopy height modeling for different forest types
平均树高是森林规划管理中最重要的林分特征之一。ICESat-2 ATL08 的冠层平均高度(Hmean,canopy)参数表示的是每个沿轨道100 m×12 m 矩形区域内所有冠层光子距地表高度的平均值。机载冠层平均高度是以机载激光雷达数据生成的1 m 空间分辨率的冠层高度模型为基础,计算相应的100 m×12 m 的矩形区域内的所有像元的平均值。星载和机载冠层平均高度两个参数表示的含义存在一定的差异。对两者进行了回归分析,结果如图7 所示,两者的R2为0.411,HRMSE为4.243 m,回归结果较差。
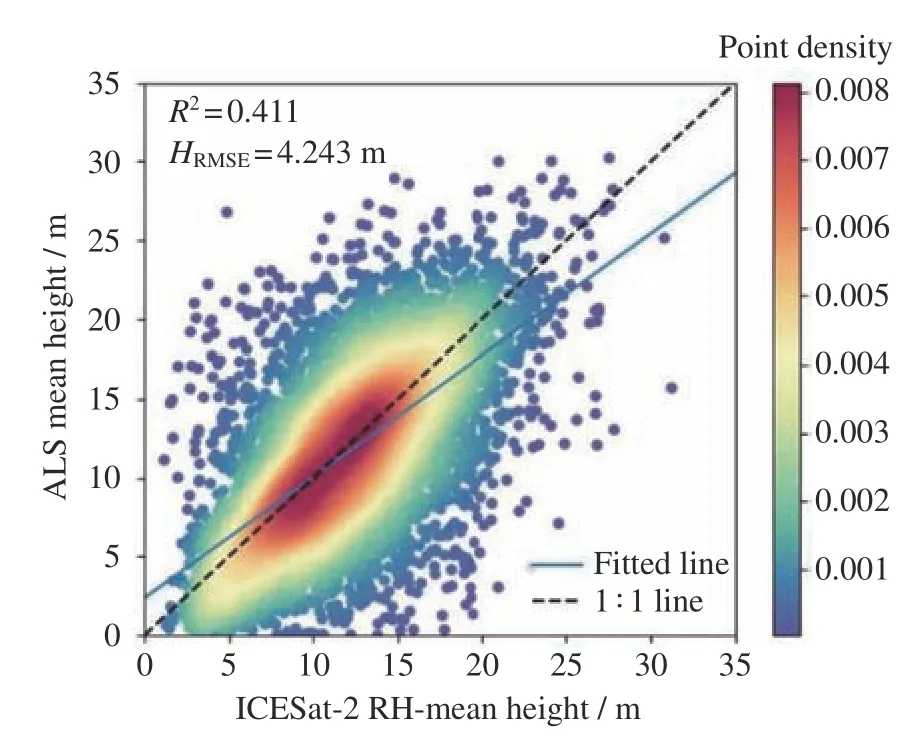
图7 机载与星载激光雷达冠层平均高度的一致性Fig. 7 Consistency of the average canopy height between airborne and spaceborne lidars
因此,研究中使用多元线性回归,利用ICESat-2 ATL08 数据提供的参数作为自变量,机载冠层平均高度作为因变量对全部的足迹点进行了预测。首先检查了星载ICESat-2 ATL08 参数自相关性,如图8所示。结合变量之间的相关性,并且使用逐步回归法筛选变量,选出最合适的参数进行建模,最终选取了25%,50%,95%,98% 以及相对高度平均值 (RH25,RH50,RH95,RH98,RH_mean) 共5 个参数进行多元线性拟合。图9 表示四种森林类型,分别由多元线性回归算法建立的回归模型的验证结果。与图7 所示结果相比,R2都有所提升,其中最为明显的为常绿林,R2提升了0.215,HRMSE降低了0.931 m。提升最小的为湿地森林,R2提升了0.070,HRMSE值降低了0.257 m。
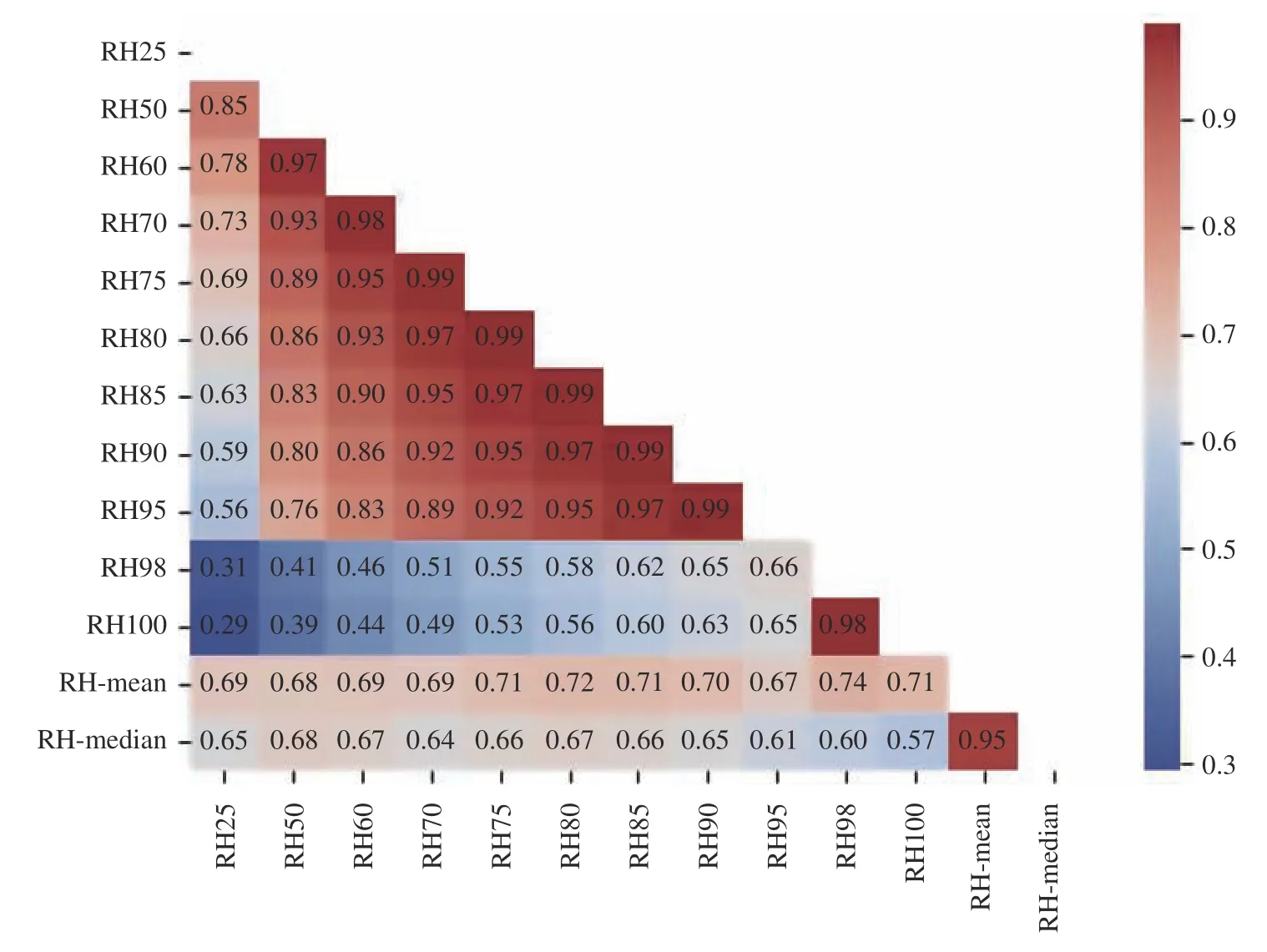
图8 星载激光雷达数据各变量之间相关性(RH25-100 表示相对高度的百分位数,RH-mean 和RH-median 分别表示相对高度的平均值和中值。色条表示变量之间的相关性,数值越大表示变量越相关)Fig. 8 Correlation between variables of spaceborne lidar data (RH25-100 represents the percentile of relative height, and RH-mean and RH-median represent the mean and median of relative heights, respectively. The color bars indicate the correlation between the variables, with larger values indicating stronger correlations)
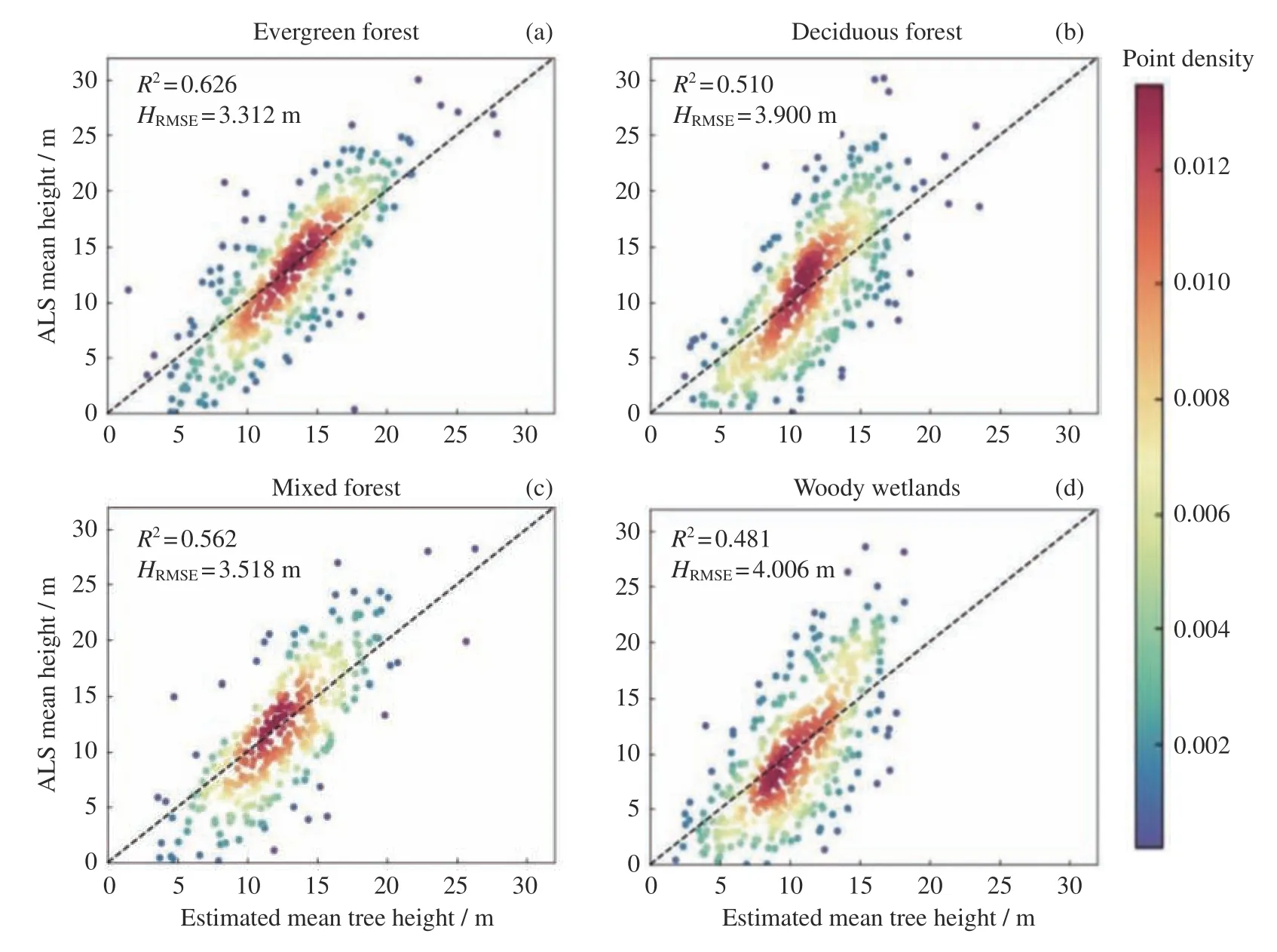
图9 ICESat-2 不同树种冠层平均高度建模散点图Fig. 9 ICESat-2 Scatter plot of average canopy height modeling for different tree species
2.3 绘制连续的密西西比州冠层最大高度和冠层平均高度图
使用预测的ICESat-2 所有足迹点的冠层最大高度和冠层平均高度为因变量,辅助数据为自变量,使用随机森林方法构建模型,实现由星载数据离散点到密西西比州连续的冠层最大高度和冠层平均高度图绘制。在训练模型时,随机选取了25%的足迹点验证模型的精度。并且将绘制的结果图与机载激光雷达采集的数据进行了验证。其结果列于表3,随机森林方法构建的回归树模型可以解释48.6%的冠层最大高度和46.7% 的冠层平均高度,HRMSE分别为4.532和2.848 m(散点图如图10 所示)。但在冠层高度相对较低的地区(<20 m),估计的结果有高估的倾向,且冠层高度越低,高估效果越明显。在冠层高度相对较高的地区,估算的结果有低估的倾向。
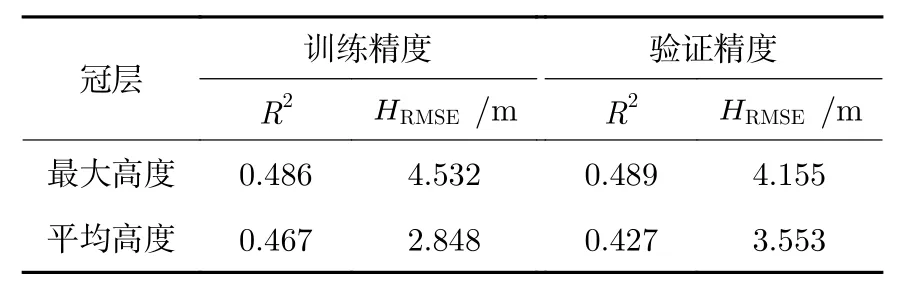
表3 随机森林回归模型的训练精度和结果图验证精度Table 3 Training accuracy and result graph validation accuracy of random forest regression models
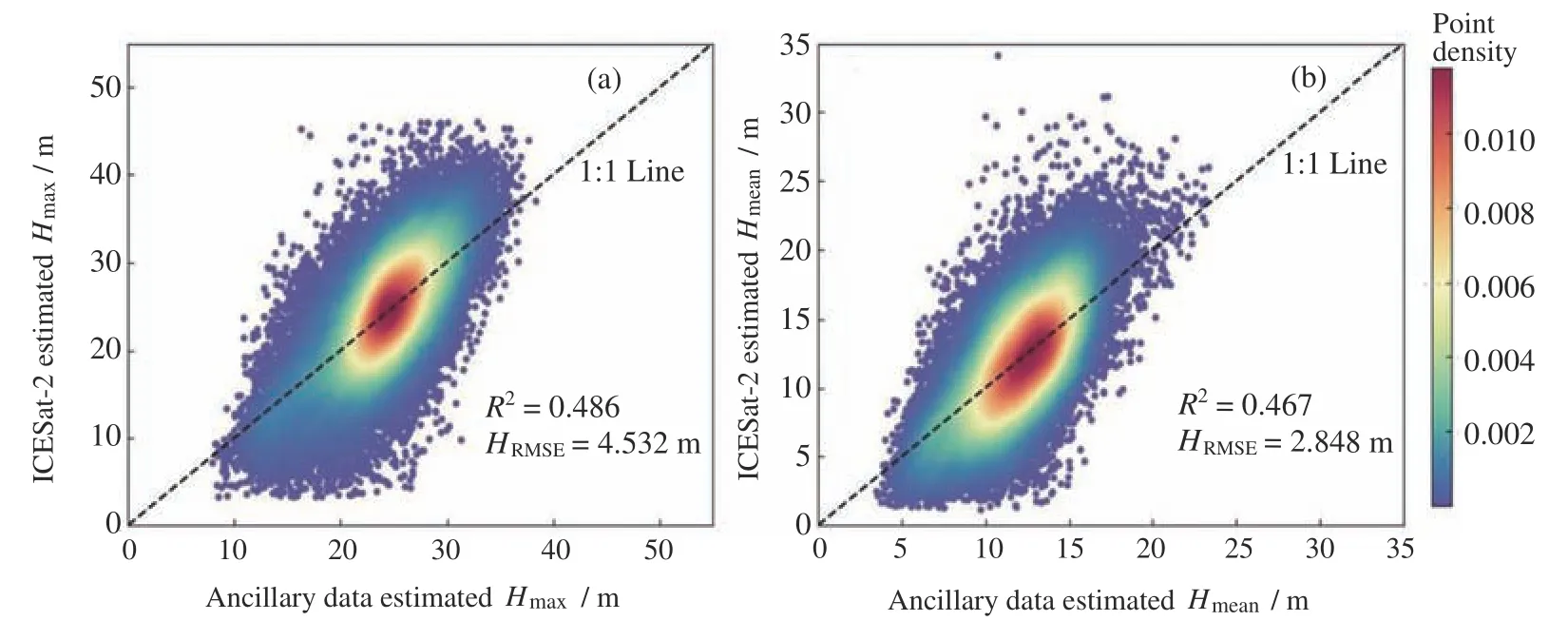
图10 随机森林模型拟合结果。(a)冠层最大高度拟合结果,(b)冠层平均高度拟合结果Fig. 10 Fitting results of random forest model. (a) Maximum canopy height fitting results,(b) average canopy height fitting results
在测试样本中估计的冠层最大高度和冠层平均高度与真实值(1.2 小节估算的所有星载足迹点的值)的比较如图11 所示。估算值与真实值的树高之间的残差服从正态分布,冠层最大高度残差的平均值为0.018 m,标准差为4.532 m,冠层平均高度残差的平均值为0.022 m 标准差为2.859 m。冠层最大高度之间的差异约95% 在±10 m 范围内,约84%在±5 m 范围内。冠层平均高度与冠层最大高度类似,但占比略低于冠层最大高度。

图11 估算冠层高度与真实冠层高度差值直方图(ICESat-2 估算的冠层高度减去根据辅助影像估算的冠层高度)。(a)最大冠层高度直方图, (b)平均冠层高度直方图。 µ 和 σ分别表示差异的平均值和标准差Fig. 11 Histogram of the difference between the estimated canopy height and the true canopy height (estimated tree height minus true canopy height). (a) Maximum canopy height histogram, (b) average canopy height histogram.μ and σ represent the mean and standard deviation of the differences, respectively
最终得到的森林冠层高度如图12 所示。总体而言,估算的林地区域的冠层最大高度平均值为24.14 m,标准差为4.24 m。从整体上看,密西西比州西南部的森林相对于其他地区的森林要高。西北地区的森林冠层最大高度最低,这主要是由于西北地区主要的土地覆盖类型为种植作物。并且发现南方地区的森林密度和高度都要稍高于北方地区。森林地区冠层平均高度平均值为12.04 m,标准差为2.59 m,分布与冠层最大高度基本一致,但是存在一定差异。
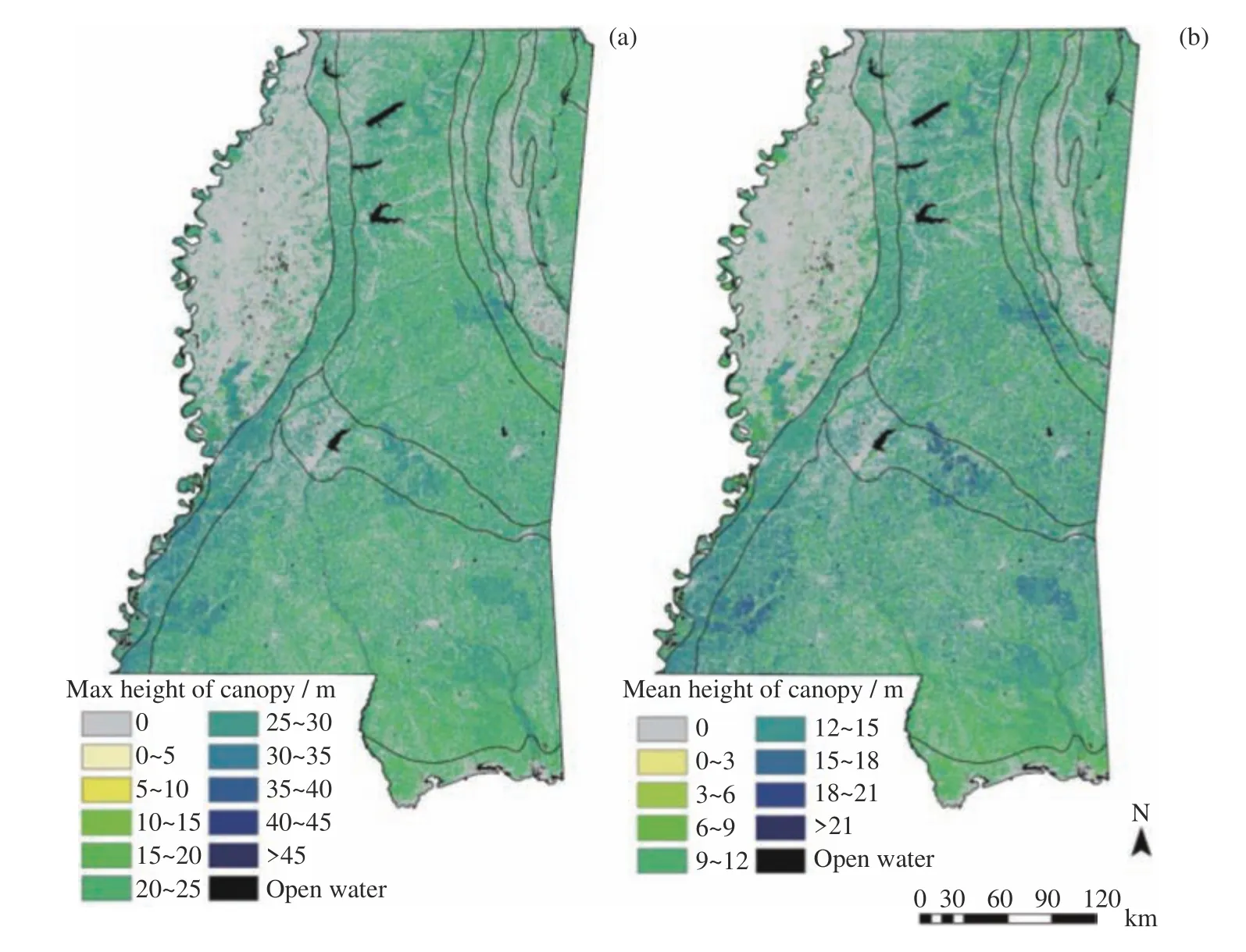
图12 冠层最大高度与冠层平均高度在密西西比州的分布Fig. 12 Distribution of maximum canopy height and average canopy height in the state of Mississippi
进一步分析了冠层最大高度与冠层平均高度之间的差值(Hmax-Hmean) 和比值(Hmean/Hmax×100),结果如图13 所示。图13(a)表明,林地区域差值的最大值为24.73 m,绝大部分的差值在8~20 m 之间。北部区域的差值变化明显低于南部区域,特别是在密西西比州的西南部区域(该区域为黄土丘陵)的差值较大,普遍超过16 m,东南部局部区域的差值在12~16 m 之间。图13(b) 所表示的比值结果与图13(a)所表示的差值结果一致(差异值越大比值越小),比值较小区域主要集中在西南部区域。

图13 冠层最大高度与冠层平均高度差值与比值Fig. 13 Difference diagram and ratio diagram between maximum canopy height and average canopy height
3 讨论与分析
3.1 星载数据足迹误差来源和冠层高度估算
分析不同采集条件(获取时间、光束类型)对星载激光雷达数据与机载激光雷达数据一致性的影响,结果表明在夜间强光束条件下获取的星载激光雷达数据与机载激光雷达数据一致性最高(R2=0.69),但是未能考虑星载激光雷达足迹点定位误差。定位误差是星载激光雷达不可避免的问题之一,将会导致星载激光雷达足迹点地理定位覆盖范围与真实地面足迹位置之间出现偏移,从而造成观测值的误差,进而影响森林冠层高度估算的准确性。已有研究对ICESat-2 数据的地理定位误差范围进行了分析,并且发现随地理位置、地形和植被状况的变化,地理定位精度也不尽相同。例如Queinnec 等[33]发现,一般情况下ICESat-2 数据的地理定位误差不超过6.5 m;Neuenschwander 等[34]在芬兰选取研究区,使用机载激光雷达数据为真值,通过最小化残差法检验了ICESat-2 ATL08 数据的定位误差大约为5 m;Magruder 等[35]选取新墨西哥州和南纬 88°区域作为研究区,研究ICESat-2 ATL08 数据的地理定位精度,发现ICESat-2 数据的平均定位精度为3.5±2.1 m;Luthcke等[36]在北纬 59.5°—80°之间选取研究区,评估了ICESat-2 数据的地理定位精度,发现水平偏移量在2.5~4.4 m 之间。就目前研究现状,星载激光雷达数据的定位误差不可避免,地形、环境和植被种类等各种因素对定位误差的影响还不明确。
利用随机森林方法预测得到的密西西比州连续冠层高度图(R2= 0.49,HRMSE= 4.12 m)与Liu 等[37]利用神经网络插值绘制的中国冠层高度图(R2=0.58,HRMSE= 4.93 m )进行比较精度存在一定的差异与不足。这可能是由于密西西比州主要是以人工林主导的非山地林区,相比于中国复杂的地形、气候、森林覆盖等环境因子,其各类环境因子的分布更均质,不同地区之间差异较小(对比结果列于表4 ,其中中国高程数据分辨率为250 m,来自资源环境与科学数据中心** https://wwwresdc.cn/data.aspx?DATAID=123)。因此利用环境因子及遥感影像估测冠层高度时,难以准确估算冠层高度间的差异。此外,本研究对比了随机森林、支持向量机的预测精度,随机森林表现得更好(见表1),但仍存在不足(R2较低),可能是由于遥感数据获取的植被指数存在一定的饱和现象,从而导致低估了生长旺盛的森林区域或者冠层较复杂区域的冠层高度[38,39]
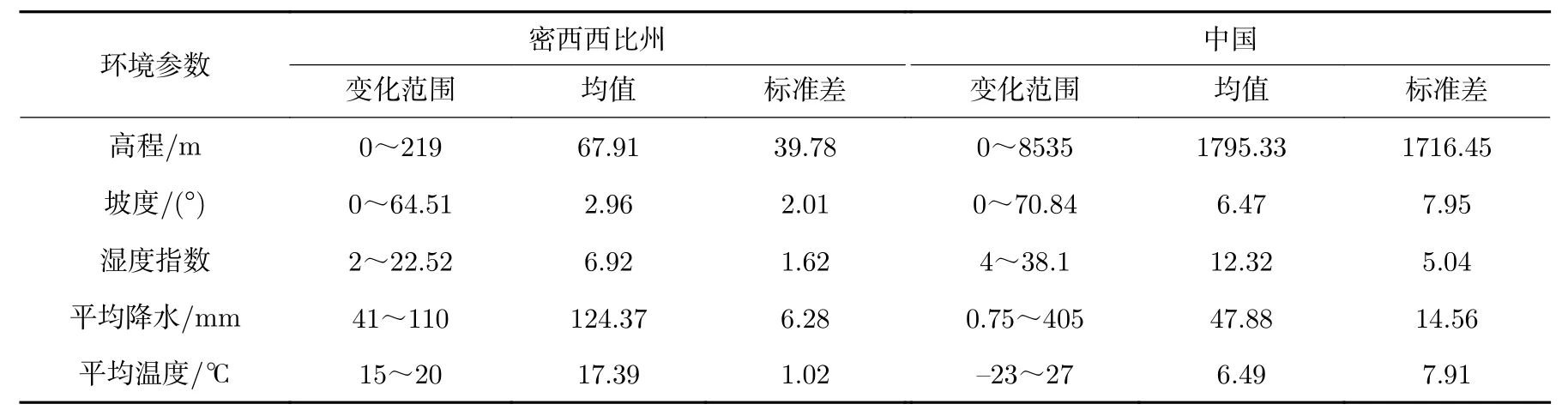
表4 密西西比州与中国环境因子对比Table 4 Comparison of environmental factors in Mississippi and China
3.2 不同地理区域及森林类型的冠层高度差异
根据地理区域分析冠层最大高度、冠层平均高度、差值和比值的分布情况。首先就冠层高度分布情况可以直观的看到,在密西西比州西北部冲积平原和东北部的黑草原两区域的树木较少,这主要是由于这两块区域地势相对平坦,更适合栽培作物和干草(冲积平原DEM 变化范围在0~35 m 之间,栽培作物覆盖占67%。黑草原DEM 变化范围在0~98 m 之间,干草覆盖占40%)的生长。在后续的分析中排除这两个区域。为了研究不同区域的冠层高度差异,统计了不同地理区域林地部分的冠层最大高度、冠层平均高度的平均值,统计结果如表5 所示。不同地理区域的冠层最大高度的平均值为23.396~26.897 m,冠层平均高度的平均值11.430~12.628 m,其中两者最大的均为黄土丘陵区域,这可能是由于三方面因素。(1)在黄土丘陵区域,特别是南部,地形起伏变化相对较大,丘陵与沟壑分布较广。地形的起伏可以极大地影响入射阳光的方向和强度,改变土壤中的水分,并影响土壤侵蚀和土壤深度[40]。(2) 在北半球,朝南的斜坡比朝北的斜坡接收到更多太阳辐射,光照水平和温度均较高,有利于树木生长[41]。(3) 沟壑、凹坡、沟底与陡坡下坡区由于土壤养分有效性更好,土壤水分、沉积物、凋落物中养分的下坡运输对树木的生长速率有积极影响,树木间相互作用更强,因此植被也往往具有更高的密度与高度[41,42]。
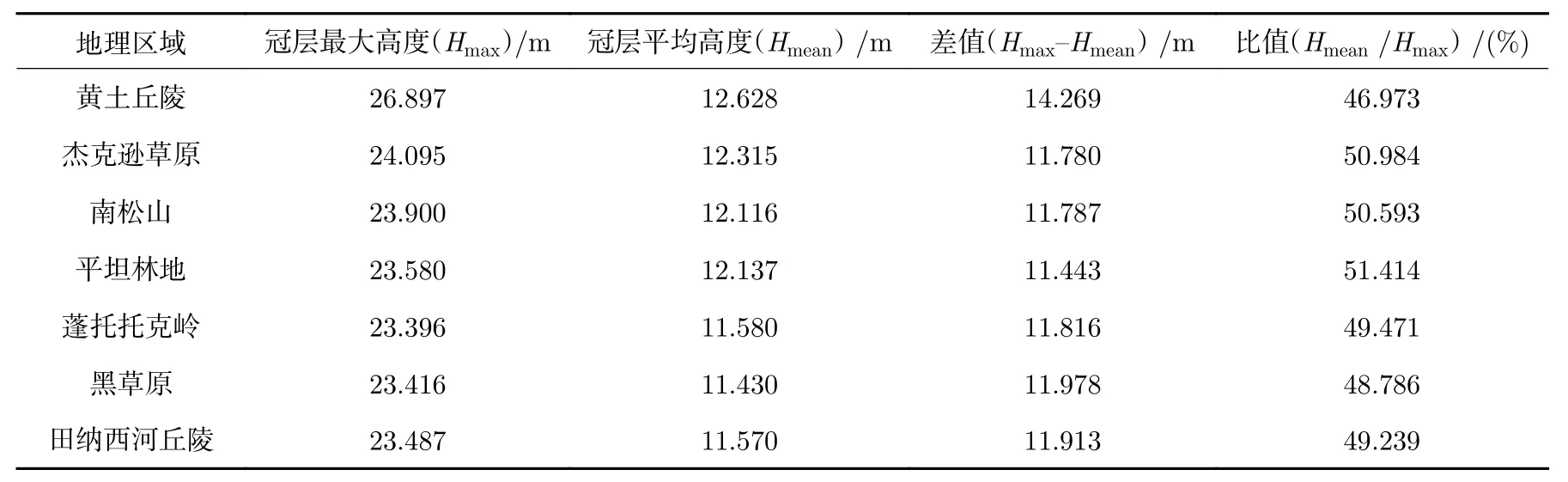
表5 不同地理区域内森林冠层高度均值Table 5 Mean values of forest canopy heights in different geographical areas
在不同森林覆盖类型的冠层最大高度和冠层平均高度的估算中,常绿林的估算精度较高,这主要是由于密西西比州的常绿森林由针叶林物种组成,例如火炬松、湿地松和长叶松,树冠茂密,使用激光雷达进行高度估计的效果更好。Malambo 和Popescu[43]也发现ICESat-2 和机载激光雷达在针叶林中的一致性优于其他植被类型。其他三种覆盖类型,包括湿地森林、混交林、落叶林,森林分布稀疏,树冠覆盖率低。因此星载与机载激光雷达足迹位置有偏差,星载数据对足迹内冠层高度变化的模拟不足,将导致ICESat-2估算精度不高。
利用冠层最大、平均高度的差值和比值来反映树木垂直结构的复杂度,当差值平均值越大,比值平均值越小,往往表明该区域的树冠复杂度越高。在对冠层高度的差值和比值分析中发现在黄土丘陵区域的差值平均值最大为14.269 m,比值最小为46.973 m(见表5),表明在此区域森林的垂直结构相比于其他区域更加复杂。不同森林类型的冠层高度的差值和比值的分析结果如表6 所,落叶林和湿地森林的冠层最大高度与冠层平均高度差值要高于常绿林和混交林,而冠层平均和最大高度的比值要小于常绿林和混交林。这说明常绿林与混交林的冠层结构较为均一。 密西西比州大部分的人工林为针叶林,属于常绿林,冠层结构比以落叶林和湿地森林为主的天然林更均一。这也是常绿林冠层最大高度与冠层平均高度差值最小、比值最大的因素之一。

表6 不同森林类型差值和比值的对比Table 6 Comparison of difference and ratio of different tree species
3.3 人工林与天然林冠层高度差异
在密西西比州,拥有大面积的人工林。为了探讨人工林与天然林冠层高度的差异性,使用Du 等[44]估算的全球30 m 人工林空间分布和树种数据 (见图14)。该数据中人工林分布数据由全球人工林范围数据集(Spatial Database of Planted Trees,SDPT)和 Descals 的全球油棕地图组成,其中SDPT 数据可提供人工林和树木作物的全球空间信息。研究进一步分析了不同森林类型中人工林的占比以及人工林和天然林的冠层高度的差值和比值差异。结果如表7 所示。在四种森林类型中,常绿林的人工林占比最高,达到31.3%,而落叶林的占比最低,只有9.9%。另外,在不同森林类型中人工林的冠层最大高度与冠层平均高度的差值要低于天然林0.08 到0.63 m,其冠层平均高度与冠层最大高度比值高于天然林0.23 %到2.07 %。这表明天然林的森林结构复杂度要高于人工林。这主要是因为人工林通常只有一层树冠(单层林),并且一般为同龄林,树种组成、结构功能单一,生态系统简单,稳定性较差[45],因此森林冠层结构复杂度更低。而天然林更易于形成多层树冠(复层林),自然演替时间长,未经人工培育或人为干扰,其形成的森林通过自然竞争可以充分利用空间,会尽可能占据整个林地空间,往往有较强的层次性[46],因此其林层差异化指数(林分内每个林层的差异情况)、树冠指数(在林分垂直结构中处于不同垂直位置冠层面积的分配情况)、林层比(样地内平均每棵参照树与其不同属一个林层的相邻树木的数量比) 一般均高于人工林,导致其林层复杂性更高,对垂直空间的利用更完善[47]。经过t-test 显著性检验,在不同森林类型中,人工林和天然林的树冠最大高度、平均高度的差值和比值都存在显著性差异。

表7 人工林与天然林差异分析Table 7 Analysis of differences between planted forests and natural forests
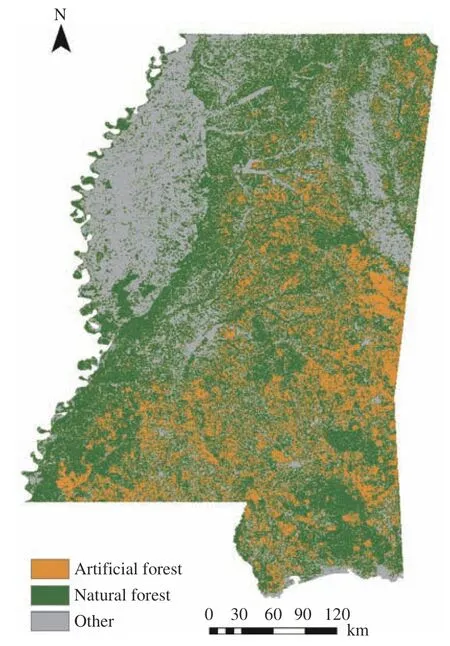
图14 密西西比州人工林与自然林分布Fig. 14 Distribution of Mississippi plantations and natural forests
4 结语
森林冠层高度监测一直是研究的热门方向,传统光学数据主要反映的是二维平面反射率信息,加上多角度观测等信息可以一定程度上反应植被的垂直结构,但是效果有限。星载激光雷达数据的出现一定程度上解决了植被结构的监测问题,但是由于其离散分布的特性,使冠层高度的空间连续分布制图依然面临挑战。如何更好地结合传统光学数据和星载激光雷达数据绘制连续的森林冠层高度图一直以来都备受关注。本研究使用了一种结合机载LiDAR 数据、ICESat-2 ATL08 数据、光学图像、地形数据和气候数据绘制整个密西西比州的30 m 分辨率森林冠层最大高度和冠层平均高度的方法。为了完成这项研究,收集了2018—2022 年密西西比州全境的ICESat-2 ATL08 数据和覆盖约1500 km2的机载激光雷达数据,模拟了冠层最大高度和冠层平均高度图,全面分析了这两个数据在研究区内的空间分布特征。并且使用冠层最大高度、冠层平均高度的差值和比值表示森林垂直结构复杂度,分析了两者在不同森林类型、地理区域以及人工林与天然林间的空间差异性。结果表明,森林区域冠层最大高度平均值为24.14 m,标准差为4.24 m。森林区域冠层平均高度平均值为12.04 m,标准差为2.59 m。密西西比州冠层高度估计值与原样地测量值吻合良好(冠层最大高度R2=0.486,HRMSE= 4.532 m,冠层平均高度R2= 0.467,HRMSE= 2.848 m)。湿地森林、落叶林的冠层高度最大值与平均值的差值高于(比值低于)常绿林和混交林。天然林的垂直结构复杂度要高于人工林。中国长江三角洲地区主要受亚热带气候影响,气候温和湿润、光照充足、降水充沛,其地形、气候等环境因子与密西西比州类似。此外,长江三角洲区域人工林分布较广,约占森林总面积的55%。因此对密西西比州的冠层高度估算不仅可以揭示研究区冠层垂直结构特征,也可为中国长江三角洲区域人工林占主导的非山地林区的碳汇潜力估算、森林资源管理提供参考。