基于趋势分析的电力系统态势感知方法
2024-01-19张冶曹世龙蔡颖凯回茜许晶晶
张冶,曹世龙,蔡颖凯,回茜,许晶晶
(国网辽宁省电力有限公司, 沈阳 110000)
0 引 言
随着电力网络规模的逐步扩大以及电压等级的升高,电网结构的复杂程度日渐加强,电力系统互联成为一种新的趋势,单个故障经过一系列连锁反应或故障得不到及时解决,会逐步恶化系统安全性,引起大规模停电,甚至导致系统崩溃[1-2]。例如2003年8月美加大规模停电事故[3],2012年7月印度的大停电事故[4],这些大国停电事件说明在电力系统防御方面仍存在很大的安全隐患,对系统变化的态势感知还不精确[5]。同时,近年来,风能、光能等清洁能源发电技术的快速发展,使得电力系统的运行更加复杂,不可控的因素也更多,对系统的安全运行提出了更大的挑战。
因此,近年来各国科学家对在线动态安全评估系统进行了新的测试和研究,完善了以潮流监测[6]、暂态稳定评估[7]和安全应急控制[8]为主的综合测评指标,形成新的安全防御体系,如文献[9-10]根据目前电力系统三道防线安全防御体系的缺陷,从稳态潮流、暂态电压等不同角度提出了新型的综合安全防御体系。但上述安全防御系统侧重于系统的某方面安全性和稳定性评估,无法感知系统整体安全演化趋势。为此,美国电力研究协会(Electric Power Research Institute,EPRI)等机构开始对电力系统态势感知演化进行研究。态势感知主要包含三个层面:觉察、理解和预测,察觉即对应当前电力系统实时运行状态辨识,理解对应电力系统安全等级评估,预测对应电力系统安全发展预测[11]。在系统状态辨识方面,文献[12]利用大数据分析技术,提出样本协方差矩阵最大特征值指标,对电网异常状态进行检测辨识;在安全状态评估方面,文献[13-14]提出了考虑线路实时风险,供电设备风险、防御缺陷风险、灾害故障风险以及拓扑结构风险的综合评估体系,可提高电力系统应对各类风险的防御能力;文献[15]从主动配电网供电能力、系统脆弱性以及分布式电源和电动汽车的不确定性等因素提出相关指标体系,并采用模糊层次分析法对当前系统状态进行安全态势等级评估;在系统安全发展预测发面,文献[16]基于负荷预测以及潮流约束进行未来系统安全评估。上述方法在一定程度上提高了电力系统安全态势感知能力,却无法定量描述系统当前运行状态与安全运行边界的距离,基于此,文献[17]提出以静态安全域边界作为标准定量描述系统当前安全性,但却无法预测未来系统安全的演化趋势快慢。因此,提出一种既能定量描述当前系统安全态势,又能反映系统安全趋势演化趋势速度的态势感知方法十分必要。
针对此,文中引入趋势分析,用于自动识别未来时变静态安全状态的趋势特征。首先在信息获取的基础上,引入N-1静态安全距离模型评估系统当前状态和未来状态的安全等级;通过将安全距离模型与定性趋势分析相结合,自动捕捉未来变化状态下运行点的移动方向,从而判断系统演化趋势。
1 电力系统态势感知框架
1.1 基于趋势分析和安全域的态势感知
态势感知主要包含系统状态辨识、安全等级评估以及安全预测三个方面,文中引入趋势分析和安全域理论进行态势感知。安全域是在电力系统满足安全运行约束的节点注入功率集合,可以提供系统的全局运行状态信息,根据运行点与安全域的相对位置,直接判断电力系统是否安全。此外,可以通过计算从运行点到安全域边界的“距离”来评估电力系统的安全裕度[18-19]。然后运用趋势分析理论,通过计算当前运行点的移动方向和趋势变化率即可预测电力系统的安全发展趋势,从而全面实现电力系统的安全态势感知。
图1所示的演示场景中,点A、B、C和D分别表示四个处于安全域内的运行状态。比较运行点A和B,可以认为A比B有更充足的安全裕度,因为A到安全边界的最小距离大于B;点A和点C移动方向相反,即使到安全边界的最小距离相同,在未来,它们会有不同的运行状态安全级别;点C和点D具有相同的安全距离和移动方向,但移动的速率不同,C在未来会比D更快地趋向不安全状态。

图1 安全域运行状态
在实时运行中,当负荷随时间变化时,安全域中的运行点将在一定范围内偏离其原始位置,安全距离信息的变化可以有效地表示系统状态安全级别的变化,因此,掌握安全距离的变化趋势,就等于获得电力系统安全态势演化的规律。
综上所述,文中所提基于趋势分析的安全态势感知的主要包括三个主要部分:1)安全域边界计算;2)当前运行点到安全边界的最小距离;3)运行点的移动方向和趋势变化率,下文将着重描述。
1.2 态势感知框架
根据1.1小节态势感知三个层面的意义,文中所提态势感知框架也包含相应三层,如图2所示。第一层是对当前信息和预测信息的获取,第二层是在综合这些因素的基础上,使用N-1静态安全距离模型对系统当前状态的静态安全性进行评估。第三层,利用趋势分析定量分析电力系统安全态势的演化趋势,从而为系统运行人员提供早期预警,方便其做出决策,防止事故发生。

图2 态势感知框架
2 N-1静态安全距离
为更好地量化预想事故下的运行状态,本节提出N-1静态安全距离(static safety distance,SSD)模型,包括3个步骤:建立N-1静态安全域、识别N-1静态安全域边界和计算N-1静态安全距离。
2.1 N-1静态安全域的定义
N-1静态安全域是由节点注入功率组成的集合,并且这些运行点需同时满足潮流方程和N-1安全约束。在定义N-1静态安全域前,首先需要定义预想故障集,理论上讲,预想故障集应包括所有电力系统元件开断故障,但针对每个元件故障均计算一次静态安全域计算量过大,耗时过长,显然也不可取。实际上,对电网运行方式影响较大的N-1故障主要为重载元件或网架结构薄弱部分元件开断,其他元件开断的影响相对较小,故文中主要选取较严重N-1故障构成预想事故集。
2.1.1 负荷确定下的N-1静态安全域
假定负荷在给定时间内是确定的,可以选择发电机的功率输出(PG,QG)作为控制变量集。第k次预想事故下的N-1静态安全域可表示为:
(1)

2.1.2 负荷不确定下的N-1静态安全域
2.1.1小节静态安全域不考虑负荷变化,但实际电网运行中,下一阶段的负荷需求是不确定,采用任何预测方法都难免产生误差,使得2.1.1小节中的静态安全域不再准确,此时需要考虑负荷不确定的影响。考虑到蒙特卡洛法能够有效处理电网中数目庞大的不确定因素,且计算时间不随系统规模扩大而增加,故文中采用蒙特卡洛法对负荷预测误差进行模拟。其中,负荷预测误差的概率分布函数(对于同一种预测方法而言,其概率分布确定)通过历史数据确定。不妨设负荷节点集合为D,根据蒙特卡洛模拟得到的下一时间段有功负荷预测误差概率分布如图3所示(以正态分布为例,其他分布可同理求求取)。
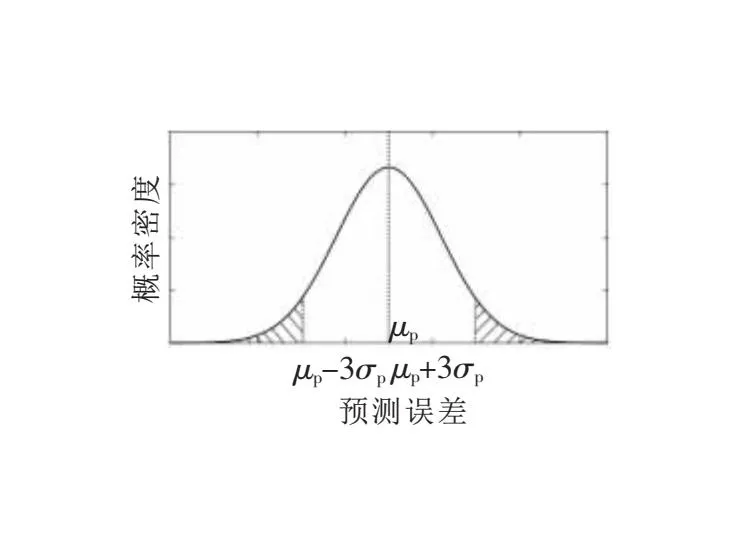
图3 负荷有功功率预测误差概率分布
(2)
(3)

(4)
(5)
(6)
2.1.3N-1静态安全域求解
式(1)、式(4)和式(5)中包含一系列非线性方程组,难以直接求解,文中采用扩展边界法进行求解,下面以式(1)求解为例进行说明,具体步骤如下:
步骤1:初始化预想故障k下静态安全域。
(7)
式中Pmin,0、Pmax,0、Qmin,0、Qmax,0分别为第i个节点注入功率的初始上下限,均在Pi、Qi附近,设置迭代次数为t= 0。
步骤2:令t=t+1,且:
(8)

步骤3:根据式(9)对静态安全域进行更新。
(9)
式中:
(10)
式中ε为功率增量步长。

步骤6:判断式(11)是否成立,若成立,则结束计算,否则令ε= 0.1ε,跳至步骤2继续计算。
ε<δ
(11)
式中δ为最小功率增加步长阈值,作为算法结束判据。
2.2 N-1静态安全距离模型

(12)
在2.1.3小节给出了安全域的求解方法,当已知安全域时,即可快速得到其安全边界。
(13)

(14)
为形象表述,图4显示了在二维空间中位于N-1静态安全域内外两个运行点的距离,运行点A在安全边界6内,这意味着点A满足该约束,从而点A到边界6的距离为正a6;运行点B在同一边界之外,则运行点B到该边界的距离为负b6。

图4 N-1静态安全距离
当系统中不存在线路过载时,系统的安全裕度短板是与运行点最近的安全边界对应的线路潮流约束。当系统存在线路过载时,怎样用最少的条件将系统运行点移到安全域内是调度人员最关注的问题之一。因此,文中将运行点与各边界之间的最小距离定义为安全距离指标。N-1静态安全距离,记作D,是给定运行点到所有N-1静态安全距离边界的最小距离。N-1静态安全距离定义如下:
(15)
当D为正时,运行状态为N-1安全。因此,D值越大,安全边距离就越大;当D为负时,运行状态是不安全的,负距离越大,当N-1预想事故发生时,当前状态越不安全。
3 基于趋势分析的态势感知方法
基于趋势分析的态势感知主要包含两部分:1)确定安全距离数据序列;2)采用趋势分析方法分析安全距离数据序列,判定安全距离的演化趋势。通过第2节计算可得到不同时间点下的N-1静态安全距离数据序列D(t),下面采用多项式对该安全距离数据序列进行拟合,分析该数据序列后续时间点的变化及变化快慢,对应系统安全性的演化方向及演化速度。
3.1 趋势提取
3.1.1 在线趋势提取的基本思想
由维氏逼近原理[18]可知,在一定精度要求下,任意时间序列函数均可由n阶多项式函数无限逼近。提高拟合精度的方式主要有两种:使用高阶多项式或缩短拟合函数的间隔。由于前者比后者更为复杂,后者通常是首选。因此,文中采用分割算法从D(t)中提取分段函数,然后进行多项式拟合,进行趋势分析。
假设时间为t,第i个数据段Di(t)的拟合多项式可记作:
(16)

3.1.2 基于积累和的分割算法
为了确定趋势识别的时间段,本节将使用基于累积和的分割算法[20]。

(17)
考虑到算法的准确性,对观测值与外推值的差值进行积分,判断当前多项式模型是否仍然可以接受。从t1开始,误差绝对值的累积和为:
Cusum(t1+kΔt) =Cusum(t1+(k-1)Δt)+
(18)
当数值积累和的绝对值超过预定的阈值ε,无法满足态势感知的精度需求。
具体的步骤如下:
1)初始化数据提取的滑动时间窗口宽度,设为m,准备接收m个安全距离数据,形成态势感知安全数据样本;
2)运用最小二乘法拟合m个安全数据,若拟合函数在第ma个数据处存在极值,则以此为界将样本划分为[1,ma)和[ma,m]两个样本,分别得到相应拟合函数;
3)根据式(18)计算拟合值与真实值的误差累积和,以及拟合函数的一阶导数;
4)若累积和不超过阈值,且一阶导数不为0,拟合函数符合精度要求,否则将累计和重置为0,转到步骤2),重新进行拟合;
5)当剩余数据小于m时,直接计算剩余数据的拟合函数,当所有数据均拟合完毕,结束提取过程。
3.1.3 累积和分级阈值的设置
累积和算法用于检测拟合函数是否可接受。如果累积和超出阈值,则必须重新计算拟合函数。显然阈值的选取直接影响趋势提取的准确性。当阈值固定时,随着观测数据的快速变化,累积和会很快超过该阈值,因此需要重新计算拟合函数。为提高提取的准确性,需对每一段的阈值进行调整。阈值的设置取决于分段逼近多项式二阶导数绝对值所代表的数据的变化。如果数据变化缓慢,则阈值设置较小。在实际应用中,如果数据变化较快,则根据给定的环境将阈值调大。这样分割算法可适应在线趋势提取。
3.2 趋势识别
电力系统态势感知中的所有趋势均可归结为图5所示的七种趋势,每个趋势均由3.1小节中拟合多项式函数D(t)的一阶导数和二阶导数组成,计算公式分别为:
(19)
(20)

图5 趋势基元
其中,D′(t)>0表示趋势增大;D′(t)<0表示趋势减小;D″(t)的正负表示趋势曲线的凸凹,可反映趋势变化的快慢。如趋势基元E(-,+)表示加速减少,B(+,+)表示减速增大,趋势基元D(+,-)表示加速增大,趋势基元G(-,-)表示减速减少。
通过3.1小节的趋势提取得到每个趋势段的拟合函数,然后与图5的趋势基元对比即可得到电力系统相应的安全态势。
4 案例研究
4.1 基于IEEE 118母线系统的案例
通过IEEE 118母线系统验证文中态势感知的正确性,该系统由19个发电机和186个支路组成。
将t= 0时的系统运行点设为基点,为便于比较,对其他5个工作点进行测试,其中母线负荷和发电机输出逐渐增加。基于上述N-1静态安全距离模型,得到t= 0到t= 5的6个运行点N-1静态安全距离及趋势段,如图6所示。将趋势分析的初始窗口宽度设置为3,累积和的分级阈值如表1所示。

表1 累积和阈值
如图6所示,前6个运行点的安全距离都是正值,这意味着系统运行状态是安全的,且具有一定的安全裕度。然而从t=0到t=5,运行点正迅速向安全边界移动。这将导致“更差”的趋势,并触发向系统运行人员的报警。如果不采取预防措施,t=6时的运行点的N-1静态安全距离将为-5.928 1 MV· A,说明电力系统N-1不安全,进一步分析发现一旦支路L5~L8断开,经过潮流计算可得支路L8~L30就会过载,说明此时的N-1静态安全距离为负主要是由支路L5~L8开断过载造成。
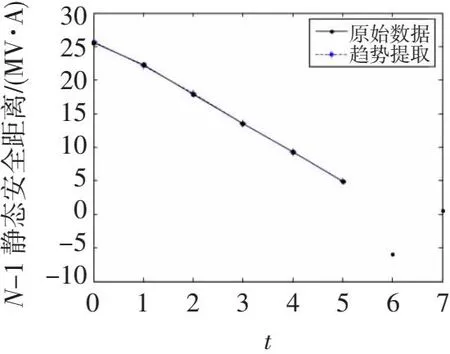
图6 N-1静态安全距离
结果趋势识别如表2所示。
假设t= 7时,已重新调度发电,且新运行点的发电机输出如表3所示。运行点的N-1静态安全距离如图7所示。

表2 IEEE 118母线系统趋势分析

表3 运行点在t = 7时发电机输出设置

图7 两个运行点在不同N-1预想事故下的安全距离
为进一步分析,图7给出了两个运行点在不同N-1预想事故下的安全距离结果,图8比较了支路L5~L8断开时两个运行点到相应安全边界的距离。
由图7可知,在两个运行点下,支路L5~L8支路开断故障下的N-1安全距离最小,且由图7可知,该最小安全距离对映的是支路L8~L30潮流约束不满足,和潮流计算得到的L5~L8支路开断后,支路L8~L30潮流过载的结果相一致,说明文中所提的N-1静态安全确实可以真实反映系统的运行安全性。
同时,第6个点和第7个点的区别在于:第6个点为N-1静态不安全的点,第7个点为重新调整潮流计算后安全的运行点。由图6和图7可知,第7个运行点的安全距离确实比第6个运行点的安全距离大,进一步说明文中所提最短安全距离能够反映系统安全状态。

图8 支路L5-L8断开时从运行点到边界的距离
4.2 基于实际区域电力系统的案例
4.2.1 测试案例概述
以河北省南方电网为例,对所提出的态势感知模型进行评价。该系统总发电能力22.03 GW,发电机65台,母线994条,支路127 1条,电压等级220 kV以上。
案例研究的是2018年9月23日上午10:15-12:15两个小时的运行数据。第一个小时的数据是每5 min作为一个时刻记录点,之后一个小时的预测数据是根据“D5000”系统估算得到。
4.2.2 结果分析
对于每一项预想事故,采用N-1静态安全距离模型对运行状态的安全级别进行量化,得到N-1静态安全距离结果的趋势曲线,如图9所示。使用第3.1节中提出的方法,从N-1静态安全距离曲线中提取的趋势段也如图9所示。在这种情况下,初始窗口宽度设置为3,累积和的分级阈值如表4所示。数据的变化分为3个范围,分别是轻度变化、可观测变化和广泛变化。然后对每个范围确定3个累积和阈值。
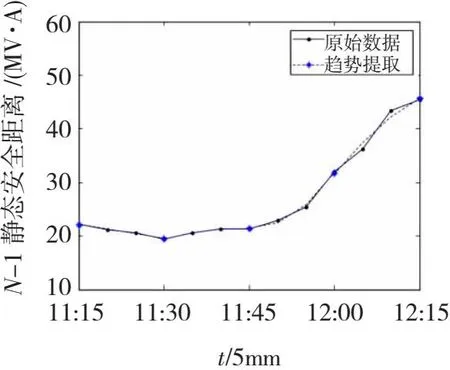
图9 N-1静态安全距离及其提取趋势
基于定性趋势分析方法,趋势可分为4个阶段,趋势识别结果如表5所示,并得到相应的趋势变化率和预警值。

表4 累积和阈值

表5 河北省南方电网趋势分析
为了更好地展示,绘制系统安全态势感知图如图10所示。柱形表示N-1静态安全距离在此趋势片段时间段里的变化量,黑色柱形表示安全距离有减少趋势,灰色柱形表示安全距离有增大趋势。此外,向上的竖线表示趋势变化速率处于加速状态,相反是处于减速状态。线段的长度表示趋势变化率的绝对值大小。
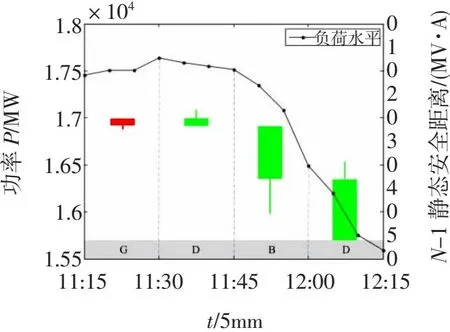
图10 态势感知图
在图9和图10中,最小安全距离的趋势表明,电力系统的安全等级在开始时变差,之后变好。从时间11:15开始,负荷增长,在11:30达到峰值。同时,N-1静态安全距离随着负荷水平的增加迅速下降至底。尽管在此时间间隔内系统保持安全(运行点的N-1静态安全距离都是正数),但运行点越来越接近安全边界,这会导致“变差”的趋势并触发警报。之后,系统负荷水平开始下降,系统从11:30-12:15变得比较安全。显然,由于N-1静态安全距离总是正的,实际系统在较低的平均负荷(小于0.2)下运行,并在安全裕度范围内满足N-1安全标准,这表明系统运行状况良好。
5 结束语
针对目前电力系统态势感知方法无法定量描述当前系统安全距离以及未来系统演化趋势速度的问题,文中展开改进的定性趋势分析算法的研究。得出结论如下:利用所提出的基于趋势的方法,可以在控制中心环境下有效地自动捕捉未来变化状态下运行点的移动方向和趋势的变化率,从而增强电力系统的态势感知。此方法可作为智能辅助手段,为系统运行人员提供先进的监控和有效的决策支持。
