抑制风电场经LCC-HVDC并网系统交流过电压的无功功率分散协同控制方法
2024-01-19赵东君郭春义
赵东君,郭春义,叶 全,樊 鑫,赵 峥,李 探
(1.华北电力大学 新能源电力系统国家重点实验室,北京 102206;2.国网经济技术研究院有限公司,北京 102209)
0 引言
为早日实现碳达峰、碳中和的目标,我国大力开发可再生能源。然而,我国可再生能源如风电集中于三北地区,负荷中心多分布于东部地区,要实现大规模风电的消纳,需持续推进高压输电工程的建设。基于电网换相换流器的高压直流(line commutated converter based high voltage direct current,LCCHVDC)输电技术具有输送容量大、造价低等优点,是我国大规模风电外送的主要方式之一[1]。风电场经LCC-HVDC 并网系统中,当大扰动或故障导致系统传输的有功功率发生锐减时,电网换相换流器(line commutated converter,LCC)送端和风电场并网点都会发生暂态过电压。作为LCC-HVDC常见的故障,换相失败会导致系统功率降为0,送端出现交流过电压问题[2]。由于风电场高压穿越能力有限,过电压严重时会引起风机脱网,扩大故障范围[3],因此,有必要研究换相失败带来的交流过电压抑制方法。
针对换相失败导致的过电压问题,现有研究主要从优化风电场控制、优化直流系统控制、增设动态无功补偿设备这3 个方面提出了改进方法。在优化风电场控制方面:文献[4]根据换相失败时送端交流电压及定子磁链的变化,改进了风机换流器的内环电流参考值;文献[5-6]分别采用有功无功功率协调控制、增加虚拟磁链的方式增强了风机的暂态无功响应能力;文献[7]表明风电低电压穿越期间少发无功功率可降低过电压水平;文献[8]通过补偿电网电压检测的时间,减弱了因检测延时造成的过电压程度。在优化直流系统控制方面:文献[9]建立了过电压预防控制和恢复预测模型,对过电压及其恢复阶段的安全性有所提升;文献[10]将反映过电压特性的虚拟电阻引入LCC 定电流控制器中,优化了直流电流和触发角变化过程;文献[11]通过增大过电压期间定电流参考值来增大LCC 对无功功率的消耗。在增设动态无功补偿设备方面:文献[12-13]在直流系统送端配备调相机,增强了系统的无功调节能力。
以上方法均可在一定程度上抑制过电压,然而多基于风电场或者直流系统单一目标开展,没有完全发挥二者协同配合的能力。目前,也有一些文献致力于多目标的协调控制,例如:文献[14]优化了直流系统和风电的控制参数,然而算法较为复杂,且很难在线调节参数;文献[15]在利用同步调相机的同时优化了直流系统定电流控制器参数,但是对于大容量的直流系统而言增设无功设备成本高昂;文献[16]研究了调相机和风电场无功补偿设备之间的联合控制,但会受到逆变站故障信号传递到整流站通信延时的不利影响。
鉴于以上方法的不足,本文提出了抑制风电场经LCC-HVDC并网系统交流过电压的无功功率分散协同控制方法。首先,在换相失败期间,推导了风电场和LCC-HVDC公共连接点(point of common coupling,PCC)处的交流电压和盈余无功功率特性。然后,从PCC 处电压和无功功率出发,利用无功-电压耦合关系和潮流方程分别确定了基于本地功率电压特征的LCC 整流站触发角和风电场无功功率参考值,进而通过分散调节LCC 整流站和风电场的无功功率来减弱PCC 处无功盈余程度,以实现过电压的协同控制。最后,在PSCAD/EMTDC 中搭建了风电场经LCC-HVDC 并网系统的模型,并在单相金属性故障、三相金属性故障以及不同风电场容量的多种情况下进行了无功功率分散协同控制方法抑制过电压的效果研究。
1 LCC换相失败期间盈余无功及过电压特性
图1 为风电场经LCC-HVDC 并网系统结构及所提出的无功功率分散协同控制方法框图。图中:Uw、Us、Ur、Ui分别为风电场并网点、等值同步机组、PCC处、逆变侧交流母线电压有效值;Udr、Id、Udi分别为LCC 整流侧的直流电压、直流电流以及逆变侧的直流电压;Pw、Qw以及Ps、Qs分别为风电场和等值同步机组送往LCC 的有功功率、无功功率;Qw1和Qs1分别为风电场和等值同步机组发出的无功功率;Pdr、Qdr、Qcr、Qci分别为LCC 整流站传输的有功功率、消耗的无功功率、滤波器提供的无功功率以及逆变站滤波器的无功功率;xw、xs分别为风电场、等值同步机组并网线路的等值阻抗;R为直流线路的电阻;α为LCC整流站触发角;N为整流站单极所含的6脉动换流器数量。为区分正常工况和换相失败暂态期间的电气量,分别以下标N 和上标“ ′ ”表示正常工况和换相失败暂态期间的电气量。以风电场并网点电压Uw为例进行说明:UwN和U′w分别为正常工况和换相失败暂态期间的风电场并网点电压有效值,其他变量的定义同理。
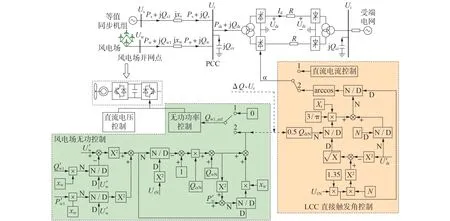
图1 风电场经LCC-HVDC并网系统结构及分散协同控制方法Fig.1 Structure of wind farm via LCC-HVDC grid-connected system and decentralized cooperative control method
正常工况下,系统功率平衡,见式(1)—(3)。
式中:QacN为正常工况下风电场、等值同步机组送往LCC整流站的无功功率之和。
当LCC-HVDC 逆变站发生换相失败时,逆变侧直流短路,Id迅速增大,故整流站消耗的无功功率增多,Ur和Uw降低。整流侧定电流控制器通过增大触发角α减小Id。在换相失败故障后的恢复期间,Udi逐渐恢复,由于控制器调节滞后于系统特性的变化,整流侧触发角仍维持在一个较大值,Id减小,Qdr减少。而整流侧的滤波器仍在发出无功功率,PCC 处和风电场并网点处无功盈余,出现暂态交流过电压。
换相失败发生后,无功功率满足如下关系:
滤波器提供的无功功率随交流母线电压的升高而增多,如式(5)所示。
盈余的无功功率流向交流系统,根据式(3)、(4),相较正常工况,过电压期间送端交流母线处盈余的无功功率ΔQ为:
此时PCC处电压变为[17]:
式中:ΔP为换相失败期间送端交流母线的有功功率变化量;Xeq为风电场和等值同步机组等效的交流系统阻抗。
因有功功率变化量对交流电压的影响远小于无功功率的影响,忽略有功功率变化量的影响,盈余无功对交流电压的影响可表示为:
2 无功功率分散协同控制方法
永磁直驱风机由于采用变流器并网,更能直接受到电网电压的影响,相较双馈风机的过电压问题更严重[7],所以本文研究的风电场对象为永磁直驱风电场。
由式(6)可知,相比正常工况,PCC 处盈余的无功功率ΔQ由整流器少消耗的无功功率以及滤波器多提供的无功功率构成,所以令ΔQ尽量接近0可减轻过电压程度。本章基于PCC 处的无功增加量ΔQ和交流电压Ur,提出了过电压期间无功功率分散协同控制方法,包括LCC 直接触发角控制和风电场无功功率控制;并设计了系统在常规控制和无功功率分散协同控制之间切换的阈值。
2.1 LCC直接触发角控制
由文献[17]可知,对于双极LCC有:
式中:U1、Ud01分别为整流站阀侧空载线电压有效值和理想空载直流电压,Ud01=1.35NU1;Xr为整流站每相的换相电抗。
由式(9)和式(10)可知,通过直接减小整流站触发角可增大整流侧的直流电压,进而增大直流电流。由式(11)可知,LCC 消耗的无功功率与直流电流正相关,所以本文旨在通过直接调整整流站触发角来快速增大LCC的无功消耗。
根据式(8)中的无功-电压耦合关系,为最大限度降低电压升高幅度,期望过电压期间LCC 整流站消耗的无功功率为QdrN、理想空载电压为U1N。所以过电压期间,直接触发角控制设定值αset为:
根据式(12),基于正常工况下的QdrN、U1N以及过电压期间LCC 整流侧直流电压U′dr,即可计算出触发角设定值αset,进而直接改变整流站的触发角来抑制过电压。
2.2 风电场无功功率控制
2.1 节通过直接调节LCC 整流侧触发角可使整流站消耗的无功功率接近正常运行时的QdrN,而LCC滤波器多发出的无功功率可由风电场调节。风电场和LCC 整流站间存在电气距离,为了避免电气信号在风电场和滤波器之间传递造成延时,本文依据潮流变化,通过风电并网点的功率特征反映LCC 滤波器的过剩无功,详细推导如下。
为使滤波器的过剩无功被风电场吸收,在过电压期间风电场送往PCC 处的无功功率期望值Qw_ref为:
风电场并网点的无功功率参考值Qw1_ref设置为:
式中:Q′xw为故障后风电场并网线路消耗的无功功率。若风电场送往PCC 处的无功功率Q′w能够跟随期望值变化,那么Q′xw为:
故障后风电场和PCC处换流母线电压满足:
把式(13)、(15)、(16)代入式(14)得风电并网点的无功功率参考值为:
由式(17)可知,在过电压期间,通过风电场并网点的交流电压U′w、有功功率P′w、无功功率Q′w1以及正常工况下的风电送往LCC 处的无功功率QwN可计算出风电场并网点的无功功率参考值,该无功功率参考值在无需通信的条件下即可跟随PCC母线电压升高程度而改变。
另外,考虑到风电场的无功调节能力受变流器容量Sw的限制,所以风电场无功功率参考值Qw1_ref需要设置限幅值Qmax为:
2.3 控制切换阈值选取
已有研究表明,当风电场的交流过电压高于1.1 p.u.时,有可能引发风机脱网[15],因检测和控制切换的延时,应在风电场并网点电压U′w升高至1.1 p.u.之前切换到本文所提控制且应避开小干扰引起的电压正常波动;同时为避免控制的频繁切换,应在切除阈值和投入阈值间设置一定死区,但切除阈值不能过低,因为控制投入时间太长可能影响系统的恢复稳定。
电压信号的采样和处理时间约为50~100 μs[18],而逻辑控制的投切延时则更短,检测和控制切换延时一般在100 μs 左右;对于35 kV 及以上供电系统,允许电压波动的范围为±5 %。所以考虑检测和控制切换的延时以及小干扰下电压正常波动,保留充分裕度,本文选取控制投入阈值为1.08 p.u.;为避免控制的频繁切换并减小控制投入对系统恢复稳定的影响,当U′w降低至1.03 p.u.时,切换回常规控制,以实现本文所提控制的滞环投退功能。由图1 可得,过电压期间,采用LCC 整流站物理量表示风电场并网点电压为:
为使LCC整流站与风电场站同时完成控制的切换,根据式(20),当利用LCC 整流站信息计算出的U′w值达到1.08 p.u.时,投入LCC的直接触发角控制;同理,退出阈值选取U′w计算值为1.03 p.u.。
综上,所提出的无功功率分散协同控制方法如图1 所示。正常工况下,控制开关在位置1,即风机的网侧变流器采用定直流电压和单位功率因数控制,机侧变流器为定交流电压和最大功率跟踪控制;LCC-HVDC 为整流侧定直流电流、逆变侧定关断角控制。当发生过电压时,控制开关切换至位置2,投入所提出的无功功率分散协同控制,通过LCC 直接调整触发角以及风电场吸收无功功率来实现PCC处过电压抑制。
3 无功功率分散协同控制的过电压抑制效果研究
为了研究无功功率分散协同控制方法抑制过电压的效果,在PSCAD/EMTDC 中搭建了图1 所示的风电场经LCC-HVDC并网系统模型。送端风电场容量为4 000 MW,由于重点研究换相失败下系统送端暂态过电压的抑制方法,故采用5 MW 风机进行了风电场等值。系统具体参数见附录A 表A1。需要说明的是,风电经LCC-HVDC 并网系统的整流侧交流系统包含了风电场和等值同步机组,风电场、等值同步机组到PCC 的等值阻抗分别为8.1、24.2 Ω,参考文献[19]计算整流侧交流系统等效短路比为2。
无功功率分散协同控制中LCC整流站触发角和风电场站无功功率参考值均利用LCC整流站和风电场站本站功率信息即可计算得到,且LCC 直接触发角控制和风电场站无功功率控制分别以LCC送端交流电压和风电场并网点电压为依据进行投切,所以在换相失败引发送端交流过电压时,无功功率分散协同控制受到长距离传输信息的通信延时影响较小。考虑到风机本身具有200 μs 左右的控制延时[20],且电压功率信息的采样以及风电场站和LCC整流站对电压功率信息的计算和处理需要一定时间,本文选取500 μs模拟控制及通信的延时,验证无功功率分散协同控制抑制过电压的效果。
故障类型和风电场容量均会影响暂态过电压水平,下文以系统运行于额定工况为例,分别在不同故障类型和不同风电场容量的多种工况下验证所提控制的过电压抑制效果。同时,对比LCC整流站、风电场站单一控制与无功功率分散协同控制抑制过电压的效果。最后,将本文方法与文献[11]提出的风电经LCC-HVDC并网系统中LCC无功控制抑制过电压方法的效果进行比较。以下仿真波形中除整流侧触发角α和逆变侧关断角γ外,其余电气量均为标幺值。
3.1 不同故障类型下抑制过电压的效果
本节设置如下2种案例,将投入和未投入无功功率分散协同控制下的系统特性进行对比:①案例1,LCC-HVDC 逆变侧交流母线在0.05 s 发生单相金属性故障,故障持续时间为0.1 s;②案例2,LCC-HVDC逆变侧交流母线在0.05 s 发生三相金属性故障,故障持续时间为0.1 s。2 种案例的系统特性分别见图2、3。

图2 案例1中系统特性Fig.2 System characteristics in Case 1

图3 案例2中系统特性Fig.3 System characteristics in Case 2
案例1 下,当未投入无功功率分散协同控制时,LCC 整流站在换相失败后的恢复过程中消耗无功功率减小,盈余的无功使得PCC 处母线和风电场并网点产生过电压,分别为1.181 p.u.和1.188 p.u.。当投入无功功率分散协同控制时,在过电压期间,LCC 整流站快速调整触发角使得直流电压和电流恢复速度加快,LCC 整流站消耗的无功功率增多;同时,风电场并网点根据PCC 处盈余的无功和电压升高程度调整无功功率参考值,增大无功功率的吸收。PCC 处母线和风电场并网点电压分别从1.181 p.u.和1.188 p.u.下降至1.106 p.u.和1.103 p.u.,过电压程度分别下降了0.075 p.u.和0.085 p.u.。
案例2 下,逆变站同样发生了换相失败。在换相失败后恢复过程中,PCC 处母线和风电场并网点均产生了过电压,分别为1.265 p.u.和1.271 p.u.;在采用无功功率分散协同控制后,基于PCC 处母线电压和盈余无功,LCC 整流站和风电场站分别调整触发角和无功功率参考值来增大无功功率的吸收,PCC 处母线电压和风电场并网点电压分别降至1.198 p.u.和1.188 p.u.,过电压程度分别下降了0.067 p.u.和0.083 p.u.。
3.2 风电场容量不同时抑制过电压的效果
为验证在风电不同容量情况下无功功率分散协同控制的有效性,本节选取风电额定功率为系统额定功率的30 % 和70 % 即Pw= 2 400 MW 和Pw=5 600 MW,分别在案例1和案例2下检验所提控制的效果。
Pw= 2 400 MW 和Pw= 5 600 MW 这2 种运行方式下,投入和未投入无功功率分散协同控制的仿真波形分别如附录A 图A1 — A4 所示。可以看出,在容量改变时,风电场仍可以较好地配合LCC 进行无功功率调节,抑制暂态过电压。
3.3 抑制过电压效果对比
3.3.1 与单一控制抑制过电压效果对比
无功功率分散协同控制包括LCC直接触发角控制和风电场无功功率控制,为进一步验证协同控制的优越性,本节基于案例1和案例2对比了LCC直接触发角控制和风电场无功功率控制两者单一控制与无功功率分散协同控制抑制过电压的效果。3 种控制方式下,PCC 处电压Ur和风电场并网点电压Uw最大值如表1所示,仿真波形如附录A图A5、A6所示。

表1 协同控制与单一控制效果对比Table 1 Comparison of effect between cooperative control and single control
从表1 可以看出,LCC 直接触发角控制和风电场无功功率控制均不如无功功率分散协同控制抑制过电压的效果明显。且相较于LCC直接触发角控制和风电场无功功率控制,无功功率分散协同控制中LCC 整流侧触发角和风电场无功功率调整幅度有所减小,LCC 整流站和风电场站承担调节无功功率的压力较小。所以,无功功率分散协同控制相对LCC直接触发角控制和风电场无功功率控制抑制过电压具有更好的效果。
3.3.2 与文献[11]所提控制的效果对比
文献[11]同样基于盈余的无功,通过增大换相失败后的直流电流来提高LCC 的无功功率吸收能力。为进一步验证本文所提无功功率分散协同控制的有效性,对比了文献[11]和本文所提控制抑制过电压的效果。其中,本节选取的参数与表A1中仿真参数一致,LCC的无功功率参考值均设置为QdrN。
具体仿真波形如附录A 图A7、A8 所示。案例1 中,文献[11]将PCC 和风电场并网点电压分别抑制到1.163 p.u.和1.170 p.u.,本文控制将电压分别降低至1.106 p.u.和1.103 p.u.,相比文献[11],本文控制使得过电压程度进一步分别下降了0.057 p.u.和0.067 p.u.;案例2 中,PCC 处和风电场并网点电压在文献[11]控制作用下分别降低至1.252 p.u.和1.257 p.u.,在本文控制下分别降低至1.198 p.u.和1.188 p.u.,过电压程度分别进一步下降了0.054 p.u.和0.069 p.u.。
综上,无功功率分散协同控制在不同工况以及不同风电场容量情况下,均可在一定程度上减弱过电压水平,且由于直接改变触发角指令并联合风电场协同调节无功,效果优于单一的LCC 直接触发角控制、风电场无功功率控制和文献[11]中的LCC 无功功率控制。
4 结论
本文提出了一种适用于风电经LCC-HVDC并网系统的无功功率分散协同控制方法,用于抑制换相失败导致的送端暂态过电压;在单相金属性故障、三相金属性故障以及不同风电场容量的多种情况下进行仿真,并与LCC整流站、风电场站的单一控制以及文献[11]LCC 无功功率控制进行对比,验证了本文所提控制抑制过电压的有效性。本文所得结论如下。
1)无功功率分散协同控制充分发挥了LCC整流站和风电场站吸收无功功率的能力,根据PCC 处的电压和无功功率特性,确定了基于本地功率电压特征的LCC 整流站触发角和风电场无功参考值,通过分散调节LCC 整流站和风电场的无功,协同抑制PCC处交流母线过电压。
2)LCC 整流站采用直接触发角控制,通过正常工况下LCC整流侧消耗的无功功率和交流母线电压以及过电压期间的直流电压,即可计算出LCC 整流站触发角设定值。在过电压期间,直接改变LCC 整流站触发角即可调节LCC消耗的无功功率。
3)根据潮流方程,以过电压期间风电场并网点的交流电压、有功功率和无功功率反映LCC 滤波器的过剩无功,通过改变风电场定无功功率控制器的参考值来联合LCC 整流站完成盈余无功功率的吸收。
附录见本刊网络版(http://www.epae.cn)。
