基于模型预测控制的高频隔离型混合配电变压器
2024-01-19王秀云裴忠晨李瑞峰杨卫平
王秀云,高 硕,裴忠晨,刘 闯,李瑞峰,杨卫平
(东北电力大学 电气工程学院,吉林 吉林 132012)
0 引言
随着源/荷占比逐年提升,高/低电压、谐波放大、三相不平衡等配电终端电能质量以及工频变压器容量不足以支撑激增负荷对电能的需求等问题日益凸显,传统的变压器仅能实现电压等级变换,不足以满足日益复杂的电网调控要求。因此,电力电子变压器、混合配电变压器(hybrid distribution transformer,HDT)等新型装置相继出现。其中,HDT将传统工频变压器与电力电子变压器的优势结合,在进行电网能量传输的同时实现对电能质量的治理[1-2]。借助电力电子装置灵活的控制功能可以使配电变压器不再仅限于电压等级变换与电能传输。具体而言,通过电力电子装置对配电变压器的部分传输功率进行调控,从而实现对电网的实时控制,这对于构建智能配电台区具有重要意义[3-5]。
文献[6]首次提出了HDT 的概念,所提出的HDT 副边由2个绕组组成,并配置1个AC/AC 变换器。该HDT 能够实现补偿负载电压跌落或骤升的功能。文献[7]使用一种矩阵变换器取代HDT 中的AC/AC 变换器,同时对HDT 进行了动态特性的建模分析,减轻了电源侧的不良影响,但由于矩阵式斩波器输入输出频率耦合,导致电能质量治理能力较弱。文献[8]提出了一种基于双极式AC/AC 变流器的HDT 拓扑结构。该结构具有良好的动态特性,主要缺点是需要使用带有中心抽头的附加绕组的变压器,结构复杂。文献[9]选用一种双极型直接式的AC/AC 变换器,给出了松弛二端口模型,解决了电压波动对电网的影响问题。文献[6-9]采用AC/AC变换器的主要优点在于无需使用直流母线电容,直接进行变换,结构简单,控制方便。但此类HDT 没有电流补偿能力,不能实现谐波、无功补偿等功能。相比具备直流环节的电压源型变换器,AC/AC 变换器难以通过续流二极管进行自然换流,因而还需要附加一些比较复杂的辅助设备实现可靠换流,这会使HDT 系统更为复杂,成本更高,从而限制此类HDT推广。
为此,文献[10]给出了采用AC/DC/AC 变换器构建HDT 的方案,并在高压侧设置了工频隔离变压器,拓宽了公共直流母线的补偿深度,实现了电能质量的治理及潮流的调控作用,但增加了HDT 的体积,同时所设计的三相电路拓扑在网侧采用星形中性线引出接法,这并不完全符合10 kV/0.4 kV 配电网的应用需求。因此,文献[11]给出了一种适应配电网的角/星接法AC/DC/AC 式HDT 结构,并给出动态模型及内环控制系统,采用比例积分(proportional integral,PI)控制器实现了HDT 对负载电压及电网电流调控的基本功能。文献[12]提出了一种AC/DC/AC 式HDT 数字控制系统离散域建模与稳定性分析方法,推导了HDT 数字控制系统PI参数的约束条件,验证了控制的有效性及系统的稳定性。综上所述,文献[10-12]指出AC/DC/AC 式HDT功能强大,可实现电网电流及负载电压的实时调控,实现电能质量的治理,但在设备的体积及提高控制的动态响应速度方面还可进一步优化。
本文在上述研究的基础上提出一种高频隔离型HDT 拓扑结构,采用AC/DC/AC 变换器,具备电能质量综合治理能力,减少电能质量治理投资;提供直流端口,可以实现新型源/荷的友好接入。设计高频隔离变换器,可有效减小电流应力及HDT 的体积。设计模型预测控制(model predictive control,MPC)策略,控制实现方便,可提高系统的动态响应速度[13]。
1 拓扑结构及数学模型
高频隔离型HDT 见附录A 图A1,双绕组工频变压器T 进行正常的电压变换和功率传输。前端变换器(front-end converter,FEC)交流侧的三相端口串联至高压侧的母线。后端变换器(back-end converter,BEC)采用三相四桥臂结构,其中三相交流端口连接至低压侧母线,第四桥臂的中线连接至线性负载中点和低压侧绕组中线。FEC 和BEC 背靠背连接,同时引出低压直流端口,用于构建低压直流配电网。
具体而言,FEC 相当于一个可控电压源,可补偿电网电压vgj(j=a,b,c)的电压波动和不对称性。当高压侧电网发生电压波动时,控制器会根据采集的数据分析此时的电压调节参数,再按照一定的占空比控制开关管导通,从而抵消高压侧波动电压,使低压侧电压vsj始终保持稳定、正弦及对称的工作状态。BEC相当于一个可控电流源,当负载电流存在谐波、无功、零序等有害分量时,控制器会根据所采集的数据分析负载电流包含的有害成分,再按照一定开关信号控制BEC 产生反向补偿分量,实时补偿谐波、无功、零序等分量,从而保证配电网的电能质量。
1.1 FEC拓扑及数学模型
FEC拓扑结构如图1所示。图中:n为CHB级联模块数量;vcj(j= a,b,c)为动态调压输出的补偿电压;ij为CHB交流侧电流;voj为CHB的交流侧电压;vdc为直流侧电容电压;R为阻尼电阻;Lp为交流侧滤波电感;Ci(i= 1,2,…,n)为谐振变换器输出侧稳压电容;Cr为谐振电容;HFT为高频隔离变压器;T为HFT变比。为独立控制各相电压,实现三相解耦,本文采用级联H桥(cascaded H-bridge,CHB)串联LLC 谐振变换器实现电压调节功能。采用CHB 容易实现模块化,易于封装和扩展,同时容易实现软开关技术,不需要阻容吸收电路;采用LLC 谐振变换器不仅能够提高效率,还能有效地实现HDT 交流侧与直流侧的电气隔离。
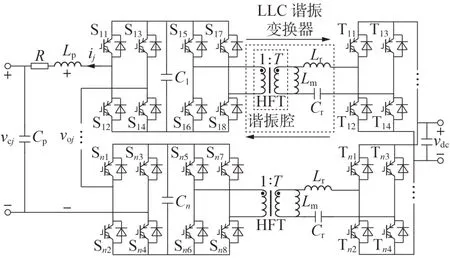
图1 FEC拓扑结构Fig.1 Topological structure of FEC
LLC 谐振变换器一般工作在谐振频率点附近,其直流电压增益M主要受品质因数Q、开关频率fs、谐振频率fr、励磁电感Lm和谐振电感Lr的影响[14-15]。在Q值不变的情况下,绘制不同电感比α下LLC 谐振变换器直流电压增益M与系统归一化频率f的关系曲线,如图2(a)所示;当α值恒定且Q不同时,M与f之间的关系曲线如图2(b)所示。图中:M=

图2 LLC谐振变换器直流电压增益特性Fig.2 DC voltage gain characteristics of LLC resonant converter
由图2 可知,当fs=fr,即f= 1 时,M恒定为1,且与负载大小无关,此时LLC谐振变换器的效率最大。由于LLC谐振变换器在谐振模式下可以保持电压增益不变,且具有恒压变比的特性,因此可以将LLC谐振变换器等效为一个理想的直流变压器模型。此时对于CHB而言,可以不考虑均压问题。如图1所示,为了便于分析,定义第i(i=1,2,…,n)个模块的理想二值逻辑开关函数为:
定义开关函数Si如式(3)所示,Si的取值有1、0、-1这3种形式。
根据基尔霍夫电压方程,由式(1)—(3)可得CHB的数学模型为:
式中:dj为CHB的占空比。
1.2 BEC拓扑及数学模型
BEC 采用三相四桥臂电压源换流器(voltage source converter,VSC)结构,如图3所示。图中:vj(j=a,b,c)为BEC 交流测输出电压;vCj为滤波电容电压;L1j为变换器侧滤波电感;L2j为电网侧滤波电感;C为滤波电容;i1j为变换器侧滤波电感电流;i2j为电网侧滤波电感电流;为BEC 输出补偿电流为BEC 输出零序电流;Cdc为直流侧稳压电容;vn为BEC 第四桥臂输出电压;Ln为中线滤波电感。

图3 BEC拓扑结构Fig.3 Topological structure of BEC
第四桥臂可为零序电流的流通提供通路,通过控制第四桥臂产生电流来补偿中线上的零序电流。与三桥臂分裂电容式相比,四桥臂结构具有直流侧所需电容小、直流侧电压利用率高、控制简单等优势。尽管新增了1 组桥臂,但第四桥臂可单独进行控制,不会对其他三桥臂的控制方式造成影响。
根据基尔霍夫电压、电流定律,得到BEC 的电压、电流方程为:
为设计BEC 控制策略,将式(5)经过Clark 变换得到α β两相静止坐标系下的数学模型为:
式中:i1y、i2y和vy、vCy、vsy(y=α,β)分别为经过Clark 变换得到的αβ两相静止坐标系下的电流和电压变量。经过Clark变换的输出电压为:
2 基于MPC的HDT控制方法
MPC 是基于被控对象模型的时域最优控制,动态响应快,可以实现信号的准确跟踪,在电力电子变换器控制中应用广泛[16]。为提高HDT 控制的响应速度,本文设计了基于MPC的HDT控制策略。
2.1 基于连续控制集模型预测控制的FEC 控制策略
前级CHB 变换器具有多个级联模块,为保证控制系统具有较好的动态响应速度的同时,减小MPC寻优计算量,本文采用一种基于连续控制集模型预测控制(continuous control set model predictive control,CCS-MPC)的补偿电压控制方法,将载波相移正弦脉宽调制(carrier phase-shifted sinusoidal pulse width modulation,CPS-SPWM)与MPC 结合[17-18],使计算量与子模块数量无关,通过直接计算最优占空比的方式获得最优解。
本文中FEC 采用双闭环控制,即电压外环与电流内环。由于FEC 采用每相独立控制,电压外环参考值为交流量,采用PI 控制会产生较大的误差。因此针对交流信号跟踪,采用准比例谐振(quasi proportional resonant,QPR)控制器来进行跟踪控制,其传递函数GQPR(s)为:
式中:kp、kr分别为QPR 控制器的比例系数和谐振系数;ω0为谐振角频率;ωc为截止角频率。
分析可知:QPR 控制器只在ω0处对输入信号的增益很大,在其他角频率处都为0;kp不仅能改变全频段幅值大小,还会影响谐振频率点增益尖峰值;控制器的增益仅受kr影响。故合理调节QPR 控制器的这3个参数,便能得到满足设计需求的控制器[19-20]。
电流内环的设计可以改善系统的瞬态响应和稳态性能。为提高系统的动态响应能力,本文设计了基于CCS-MPC的电流内环控制方法。
控制系统的采样周期为Ts,对式(4)进行离散化,得到FEC的离散模型为:
式中:p=1-TsR/Lp;q=Ts/Lp;voj(k)、vcj(k)(j= a,b,c)分别为k时刻的CHB 交流侧电压和动态调压输出补偿电压;ij(k)为k时刻的CHB 输出电流;ij(k+1) 为k+1时刻的CHB输出电流。
每相独立控制过程中,在构建α β静止坐标系时,单相分析由于缺少分量,需要构建虚拟正交分量构成α β两相静止坐标系。假设相量X在0 时刻与α轴重合,幅值为xm,以电网的角频率ωs旋转,则有:
式中:xα为系统的固有量;xβ为构建的虚拟正交相分量,可通过1/4周期延时构建虚拟轴分量。由于β轴分量xβ=xmsin(ωst)=xmcos(ωst-π/2),相对α轴分量相位延迟了π/2,即滞后了1/4 周期。实际实现时,t1时刻与t2时刻相量相差了ωs(t1-t2)=π/2角度。
此时FEC 在α β静止坐标系的离散模型可以表示为:
式中:iy,j、voy,j、vcy,j(y=α,β;j=a,b,c)为在每相构建的α β静止坐标系分量。
为使k+1 时刻的电流预测值与电流指令值尽可能地接近,误差达到最小,通过构造代价函数来评估该误差。综合考虑跟踪精度和响应速度,本文采用平方误差形式,由此设计的代价函数gj为:
式中:iy,jref(y=α,β;j=a,b,c)为内环指令电流,是由经QPR 控制器进行电压外环控制得到的。由式(12)可知所设计的代价函数是关于CHB 输出电压的一元二次函数,因此对代价函数求偏导,令导数等于0,即可求解出CHB 输出电压的最优控制量,分别如式(13)和式(14)所示。
联立式(14)与式(4)可得最优占空比doj为:
由式(15)可得CHB 最优占空比,再通过CPSSPWM 方法对FEC 进行控制,无须找出所有的开关状态,能够在具有良好动态性能的同时,减小级联系统的计算量。该方法可适应于多级联模块系统的MPC,简化了寻优算法,且具有较高精确度的追踪效果。
2.2 基于延时补偿MPC的BEC控制策略
HDT 的BEC 设置为三相四线制,其中第四桥臂用来补偿由负载不平衡产生的零序电流。考虑补偿过程的响应速度,本文采用MPC 策略。但MPC 方案需要大量的计算,会在控制过程中引入相当大的时间延迟,若不考虑该延迟,则会恶化系统的性能,导致谐波指令跟踪不准确。因此,本文在MPC 的基础上,加入了延时补偿。预测延时补偿的解决方案就是考虑计算时间,并在下一个采样瞬间后应用选定的开关状态,减小了电流波动。
谐波电流与无功电流补偿主要由两部分组成,即指令电流检测与补偿电流跟踪。指令电流检测部分将负载电流的谐波和无功成分提取出来,然后将所得指令电流送入补偿电流跟踪控制系统中,通过驱动电路控制变换器产生补偿电流,同时对实际补偿电流进行跟踪并修正指令电流信号以实现补偿目的。相关谐波、无功及零序分量的指令电流表达式见附录A式(A1)—(A5)。
在对瞬时无功功率理论进行研究后,发现基于瞬时电流谐波检测法在进行Clark变换时,三相电流ila、ilb和ilc中的零序分量会相互抵消,所以三相不平衡负载电流中的零序分量并不会影响谐波电流和无功电流的检测,因此在进行谐波电流提取时不需要对零序分量进行预处理。
BEC 在α β静止坐标系下的表达式如式(6)所示,对系统的模型进行离散化处理,离散化的结果如式(16)所示。

当系统稳定运行时,滤波电容电压是稳定的,此时可以忽略滤波电容的影响,则有:
综合考虑跟踪精度和响应速度,选取网侧电流作为控制对象,并将式(18)代入式(17)可得预测模型为:
延迟模型如下:
根据延时补偿模型,分别计算出k+2 时刻的电流预测值。根据控制的具体要求,建立相应的代价函数J,将电流预测值代入代价函数中。代价函数J的表达式为:
对于不平衡负载下的零序补偿,本质上是控制第四桥臂产生电流来补偿中线上的零序电流。由于零序电流是交流量,采用PI 控制会产生较大的误差,所以本文采用与2.1节电压外环控制相同的QPR控制。通过零序电流环,将检测出的零序电流作为指令电流,控制第四桥臂产生一个与实际电路中的零序电流幅值相等、相位相反的电流。采用QPR 控制器可以实现无静差跟踪零序指令电流,使流入中线的电流基本为0。
本文提出的高频隔离型HDT 的控制策略如附录A 图A2 所示,主要有两大部分组成:基于CCSMPC 的FEC 控制以及基于延时MPC 的BEC 控制。基于CCS-MPC 的FEC 控制主要包括波动电压的检测和电压电流双闭环控制;基于延时MPC 的BEC 控制包括指令电流的检测与计算、补偿电流的生成控制。两大控制板块协调运行,实现高效快速的电能质量综合治理。
3 仿真分析
为了验证本文所提拓扑及控制的有效性,在MATLAB/Simulink 中搭建了如图A1 所示的HDT模型,并根据图A2 设计的控制策略进行了仿真验证。仿真模型参数详见附录A表A1。
在进行FEC 相关动态电压调节等仿真的验证时,考虑所提HDT 的应用场景主要是10 kV/0.4 kV的配电台区,且本文FEC 中的每个模块都为全桥结构,补偿范围最高可达到±800 V。根据《电能质量供电电压允许偏差》对电压偏差不超过10 %的要求,级联模块数量设计为2 个即可,以下相关的仿真验证都是基于此进行展开的。
3.1 动态电压调节
本文所提高频隔离型HDT 的动态电压调节波形图见附录A 图A3。如图A3(a)所示,设置电网电压在0.07~0.12 s 处突增至1.1vg,在0.15~0.2 s 处突降至0.9vg。由图A3(b)、(c)可知,HDT 参与调节后,负载电压经过补偿过程后,可稳定在正常范围内,且补偿响应快速。图A3(d)为基于CCS-MPC 的a 相补偿电压,可知采用本文所设计的控制系统可以快速地实现指令值的准确跟踪。图A3(e)为在HDT参与的情况下,系统中的功率变换。当电压发生波动时,功率波动ΔP由HDT 承担,这说明HDT 运行的过程中,始终是以部分功率运行,只有在电压发生波动时,HDT才会投入。
考虑三相不平衡下的极端情况,在0.1~0.15 s处设置三相电压不平衡,调节波形见附录A 图A4。由图可知,HDT参与调节后,三相不平衡部分可以被有效补偿,负载电压经过补偿后,始终稳定在正常范围。
仿真结果证明,本文所提控制策略可以实现三相独立控制。
3.2 动态响应
为验证本文所提控制的优越性,通过仿真进行了不同控制下电压调节能力对比。图4 为采用本文所提CCS-MPC 以及采用PI 控制后的低压侧电压。由图可知:在CCS-MPC 下,电压调节在0.5 ms 后实现稳定运行;而采用PI 控制后的负载电压,在2 ms后才能获得较为理想的电压效果。仿真结果表明,本文所提控制方法的动态响应性能要优于传统PI控制。

图4 基于CCS-MPC及PI控制的低压侧电压波形Fig.4 Waveforms of low-voltage side voltage based on CCS-MPC and PI control
3.3 谐波补偿
利用本文所提HDT 进行谐波补偿前后的电网电流波形分别见附录A 图A5、A6。在0.10、0.13 s 处设置了阶跃操作。具体而言,HDT 提供一个由三相不可控整流器和三相阻性负载组成的非线性负载。其中:不控整流电路提供30 Ω 的电阻,各相阻性负载的值为20 Ω;在0.10 s 时,将不控整流电路提供的电阻切换为15 Ω;在0.13 s 时,移除c 相中的电阻负载。由图A5 可知:电网电流中含有大量的5、7 次谐波;[0.05,0.10) s 时,电网电流的总谐波畸变率(total harmonic distortion,THD)为12.74 %;[0.10,0.13) s时,电网电流THD 为14.70 %;[0.13,0.20] s 时,电网电流THD 为19.90 %。由图A6 可知:在HDT 的参与下,5、7 次谐波被有效地补偿,此时电网电流呈现标准的正弦波。经过补偿,[0.05,0.10) s 时电网电流THD降为1.75 %;[0.10,0.13) s时电网电流THD降为1.65 %;[0.13,0.20] s 时电网电流THD 降为1.69 %。仿真结果证明,本文所提HDT 能够有效地进行谐波治理。
同时,针对常规MPC 与延时补偿MPC 这2 种情况下的谐波电流追踪波形进行了仿真对比,见附录A 图A7。由图可知:在常规MPC 情况下,未考虑计算时间的影响,电流纹波较大,对谐波补偿的结果会造成影响;在延时补偿的作用下,电流纹波幅值明显降低,能够更准确地追踪谐波电流指令值,提高谐波补偿的准确性。
3.4 无功补偿
为突出无功补偿的效果,本文设计在0.10 s 时投入HDT 进行无功补偿,仿真波形如图5 所示。由图可知:0.10 s 前电网电压相位超前电流相位,此时系统中存在无功分量36 kvar,功率因数cosφ为0.88;0.10 s后,HDT 投入调节,补偿了系统中的无功分量,此时电网电压和电流基本保持同相位,无功分量Qr降为1 kvar,系统的功率因数提高到0.98。仿真结果证明了本文所提HDT无功补偿的有效性。

图5 无功补偿波形Fig.5 Waveforms of reactive power compensation
3.5 零序补偿
为进行零序补偿的验证,在仿真中将a、b、c 三相阻性负载设置成不平衡负载,此时电网电流是不平衡的,系统中存在零序分量。为设置对比,在0.15 s 时,HDT 投入补偿。零序补偿结果如图6 所示。由图6(a)可知,0.15 s 后三相电流呈现平衡状态;由图6(b)的中线电流in0波形可知,未进行补偿前,中线上流过零序电流,0.15 s 后变为0;由图6(c)可知,在零序补偿控制下,零序电流实际值能够准确地追踪零序电流指令值。仿真结果表明本文所提HDT可以有效补偿系统中的零序电流。

图6 零序补偿波形Fig.6 Waveforms of zero-sequence compensation
4 结论
本文提出了一种高频隔离型HDT 结构,具备交/直流混合供电以及电能质量治理能力,并设计了MPC策略。得到以下结论:
1)不引入多绕组变压器,减小变压器磁集成设计难度,在高压侧串入高频隔离变换器,可以减小装置体积,降低电流应力,功率器件选型更灵活;
2)电能质量治理功能高度集成,能够有效地实现高/低电压补偿、三相不平衡治理、无功补偿、谐波电流抑制等功能,同时具备交直流混合配电接口,避免了重复性投资,具有一定的经济性优势;
3)采用MPC 策略,提高了HDT 的动态响应特性。FEC 采用CCS-MPC,通过直接计算最优占空比的方式,避免了复杂的多级联模块空间矢量遍历寻优过程,节约了控制器系统计算资源。
附录见本刊网络版(http://www.epae.cn)。
