近景摄影测量装配式建筑定位关键技术研究
2024-01-18高平
高 平
(山东港通智汇信息技术有限公司,山东 烟台 264000)
传统的装配式建筑定位方法通常依赖于人工测量或者传感器的使用,其存在定位精度不高、效率低下的问题[1-3]。而近景摄影技术是在电子信息技术基础上发展而来的一种非地摄影测量技术,摆脱了传统解析摄影测量仪器的限制,能够实现近距离(<100 m)对目标体的图像数据进行获取,并对几何图形实现自动化的处理,近景摄影测量技术以其非接触、高精度、高效率的特点,成为了一种有效的定位手段和较高精度的测量方法,在装配式建筑定位中具有重要的应用价值[4]。
结合实际工程案例,研究提出了2 个近景摄影测量装配式建筑定位关键技术,运用现场实测的手段,分析了近景摄影技术的测量精度,研究成果可为装配式建筑构件的定位施工提供参考和借鉴。
1 工程概况
山东省烟台市某地块二标段装配式建筑项目建筑面积177 052.31 m2,地下室建筑面积65 561.33 m2,地上建筑面积111 490.98 m2。地上建筑包括叠墅30 栋(34#~63#)、联排(86#~101#)16 栋,均为装配整体式框架剪力墙结构。工程设计装配率为50%,其中装配式主体结构构件主要包括预制剪力墙、预制叠合楼板两种,其中预制剪力墙板总计9 498.75m³,叠合板总计4 110.8m³。预制构件混凝土设计强度均为C30,其中叠合板有60 mm厚、70 mm 厚两种规格。预制剪力墙连接方式为在下层板面施工时现浇混凝土反坎,预留灌浆孔内插筋,待上部墙体安装完成后,封仓灌浆封闭;叠合板预留钢筋与上部现浇结构锚固连接。研究项目预制构件数量巨大、种类多,对施工阶段现场构件装配定位精度提出了很大的挑战。
2 近景摄影测量的基本原理及设备选型
2.1 近景摄影测量的基本原理
近景摄影技术是在电子信息技术基础上发展而来的一种非地摄影测量技术,它是摄影测量与遥感学科的一个分支,与传统的测量定位方法相比具有测量精度高、测量成本低、便携性高、测量采样率和数字化程度高的特点[5-7],如表1 所示。近景摄影技术摆脱了传统解析摄影测量仪器的限制,能够实现近距离(<100 m)对目标体的图像数据进行获取,并对几何图形实现实时自动化的处理,可确定测量目标体的形状、大小、性质和位置。就近景摄影测量技术而言,其具有独特的测量特点,它是一种基于数字信息与数字摄像技术、自控技术的手段,能够在瞬间捕获目标物体的大量物理信息和几何信息,不仅适用于静态物体,也适用于动态物体,以非接触手段获取的信息存储在数字图像载体中,并被重复调用和处理,提供相当高的精度和可靠性的测量成果,对应用于装配式建筑的高精度定位要求就有良好的适应性[8]。
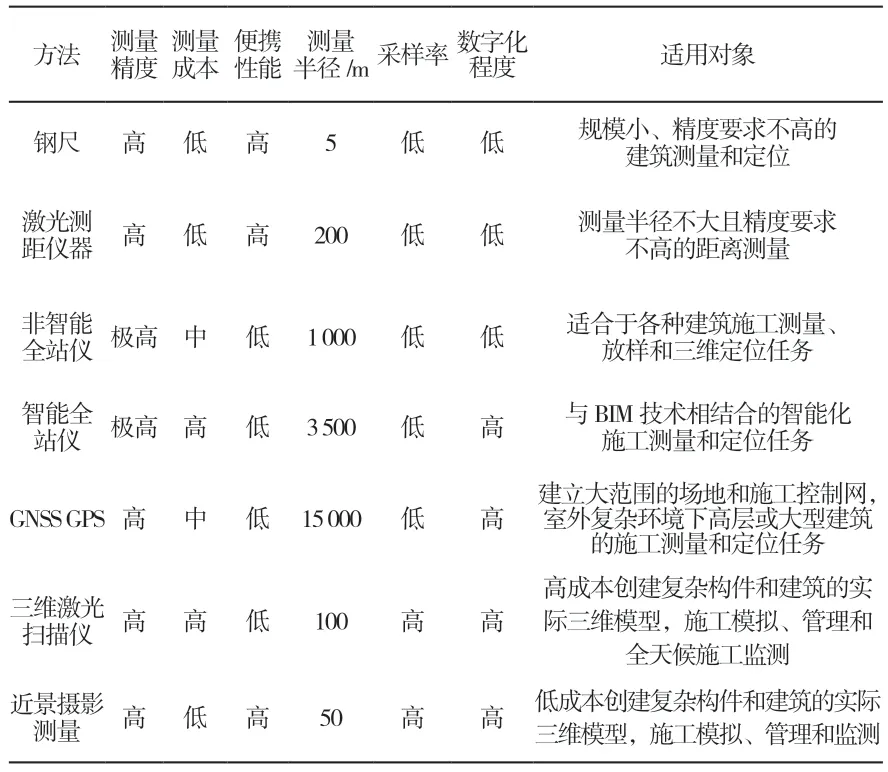
表1 不同施工测量定位方法的性能比较及适用对象
近景摄影测量技术的基本原理为光学成像原理,在设定参数条件下,非测量用数码相机(普通相机)对目标物体的光学影像获取,建立目标点、成像点之间的坐标对应关系如公式(1)所示[9]。
式中,f为主距;(x,y)为成像点在像平面中的坐标;(x0,y0)为像主点在像平面中的坐标;(X,Y,Z)为物点在物三维空间中的坐标;(XS,YS,ZS)为摄影中心在物三维空间中的坐标;ai、bi、ci 为旋转矩阵元素。
2.2 近景摄影测量的设备选型
近景摄影测量选用的摄影设备为佳能公司生产的EOS-5D 型单反数码相机,其感光器件为CMOS,感光器件尺寸为35.8 mm×23.9 mm,最大像素为1 330 万像素,有效像素为1 280 万像素,最高分辨率为4 368 像素×2 912 像素,图像分辨率为43 68 像素×2 912 像素、3 168 像素×2 112 像素、2 496 像素×1 664 像素,相机焦距为35mm,径向畸变系数为3.00×10-9像素,径向畸变系数为-1.24×10-16像素,偏心畸变系数为-5.33×10-8像素,光学变焦倍数可根据镜头选定,镜头性能为佳能EF 系列镜头,快门采用电子控制,为纵走式焦平面快门,快门的速度为30~1/8 000 s,等效感光度为自动ISO 100~1 600,存储介质为CF 卡,图像存储格式为JPEG、RAW、JPEG+RAW。
3 基于近景摄影测量成果的装配式建筑构件追踪定位技术
装配式建筑构件的追踪定位的核心功能是对现场装配阶段构件的空间信息进行创建、存储、采集、传递和共享。近景摄影测量应用于装配式建筑构件追踪定位领域时,需要先在装配式建筑构件上布置可识别的标志物,如二维条形码或二维码,利用摄影仪器(摄像机或云台)对建筑物进行拍摄,利用图像中的特征点或标志物进行空间三角测量,对相邻影像的匹配,分析装配式建筑构件上标志物的位置和姿态,从而获取建筑物的三维坐标信息,实现对装配式建筑构件的追踪和定位。这一过程中,为得到建筑物在三维空间中的精确位置,需要进行影像的去畸变处理、相邻影像的匹配等步骤。基于近景摄影测量成果的装配式建筑构件追踪定位技术信息流如图1 所示。

图1 基于近景摄影测量成果的装配式建筑构件追踪定位技术信息流
在装配式建筑数据库中,存储了装配式构建的所有属性信息,包括构件类型、材料属性、构件尺寸、构件状态、构建位置、构件力学参数等,这些数据是构件追踪定位技术链的首要条件,通过近景摄影技术获取的构件现场实体空间坐标信息,可以运用自动识别技术和追踪定位技术与这些属性信息建立关联。
4 基于近景摄影测量成果的装配式建筑构件条形码定位解析技术
在装配式建筑构件的拼装施工中,为了获得的待测点的三维坐标,基于近景摄影技术对待测点的特征具有一定的要求,比如表面具有纹理或者可识别的明显特征,然而现实的情况是拼装过程中存在不可通视或者隐蔽情况,在被拍摄物体上建立固定的控制点,不仅不能满足被测物体随时变化的要求,而且在每个待测点周围布置控制点也加大工作强度,费时费力,在测量范围和测量时间增加的同时,导致固定控制点标志也和像片数量急剧增加,给近景测量的解译带来出错的概率。编码技术则可避免以上现实问题,同时由于编码标志带有数字编码信息,实现了数值水准测量的自动化。在近景摄影测量技术中,对条形码编码的解释十分关键,其解码的关键技术流程如图2 所示。
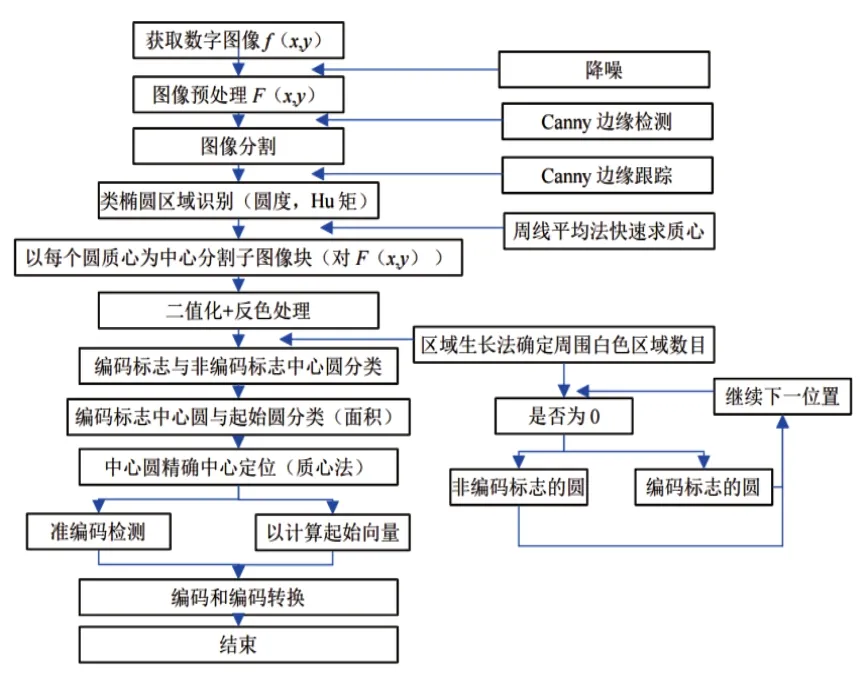
图2 基于近景摄影测量成果的装配式建筑构件条形码定位解析技术流程
5 装配式建筑施工中近景摄影定位技术精度分析
为了验证近景摄影定位技术的施工精度,在项目施工过程中运用全站仪测量技术进行平行试验,对比两者的定位误差,测量结果如表2 和图3所示。从图3 中可以看出,装配式建筑施工基于近景摄影技术和全站仪测量技术的定位误差范围均居于±10 mm 之间,满足装配误差要求;近景摄影技术和全站仪测量技术的定位误差频率存在明显不同,近景摄影技术的定位误差主要集中于±4 mm,而全站仪测量技术的定位误差主要集中于-10~-4 mm和4~8 mm,在±4 mm之间的频数较小,由此表明,近景摄影技术具有比全站仪测量技术更高的定位精度。

图3 近景摄影技术与全站仪测量技术的定位误差频数分布
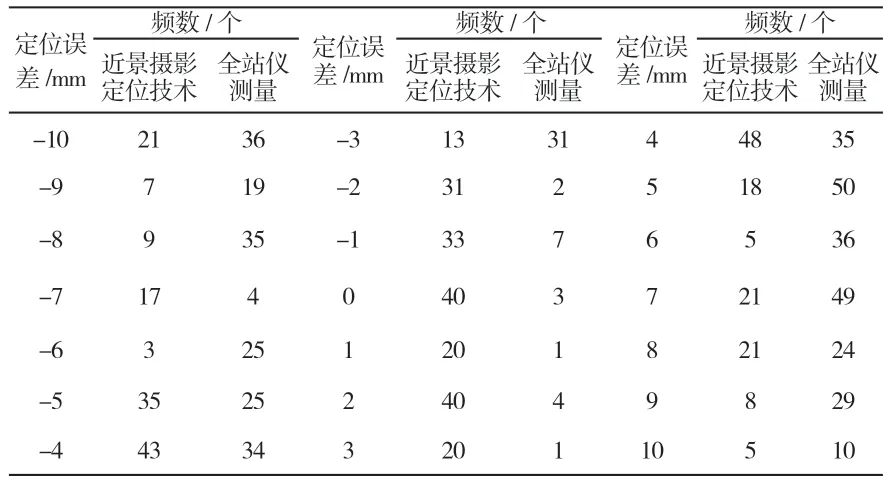
表2 装配式建筑施工基于近景摄影技术与全站仪测量技术的定位误差对比
6 结语
以山东省烟台市某地块二标段装配式建筑项目为研究对象,在分析近景摄影技术的原理基础上,确定了摄影设备,并提出了2 种施工关键技术,运用现场实测的手段,研究了近景摄影技术的测量精度。得到以下几个结论:
(1)提出了基于近景摄影测量成果的装配式建筑构件追踪定位技术、基于近景摄影测量成果的装配式建筑构件条形码定位解析技术,有效解决了装配式建筑构件施工中三维坐标获取困难和精度不足的问题。
(2)对比近景摄影技术和全站仪测量技术的定位误差,结果表明两者的定位误差范围均居于±10 mm 之间,满足装配误差要求;近景摄影技术的定位误差主要集中于±4 mm,而全站仪测量技术的定位误差主要集中于-10~-4 mm 和4~8 mm,近景摄影技术具有比全站仪测量技术更高的定位精度。