基于物联网技术的浮游植物清理机械设计研究
2024-01-17王欣
王 欣
(荆州职业技术学院,434020,湖北荆州)
1 引言
淡水是人类赖以生存的重要资源,然而全球可被有效利用的淡水总量并不充足,生态环境不断受到破坏,《2019 中国生态环境状况公报》显示,中国水域污染严重,水域环境治理仍是重中之重,其中水生植物是主要污染源之一[1]。国内常见的水葫芦等水生植物即是入侵物种,在20 世纪30 年代被引入中国,此物种繁殖速度极快且易使水体富营养化,导致水体出现赤潮等灾难,被世界范围列为害草之一[2]。采用何种效率高、成本低且无害的方式解决这一问题成为关键。
最常用的方法包括人工或工程机械打捞、生物防治、化学防治等。已有水域垃圾清理船尤其是水生植物清理船常用于清理大江大河,难以清理小型水域[3-4]。国外,在此项研究上除了采用传统的机械打捞方法和化学除草剂、抑制剂等方法防治外,还实施了有针对性的天敌昆虫(如水葫芦象甲等)防治技术,但外来引种如果没有其“天敌”抑制,也会带来祸害[5]。还有研究人员采用病原体微生物以降低浮游植物繁殖力的方式进行控制,但这种真菌防治方式需要大规模筛选、驯化及培养当地水体中的菌种才能进行。
本研究针对小型河流、湖泊、公园等狭窄水域作业环境及水域浮游植物复杂多样的特点,提出了一种新型水域浮游植物清理机械的设计方法。
2 整机结构
该浮游植物清理机械的主体结构由采集机构、辊切挤压机构、传输收集机构、机架、控制器、电机、船式浮动载体等构成,主要工作部件装于船体中,如图1 所示。
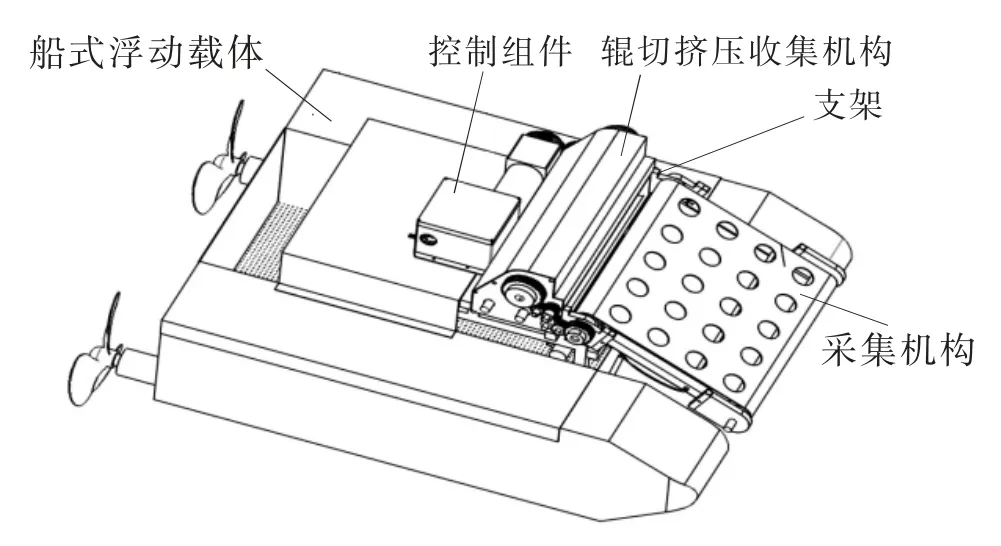
图1 浮游植物清理机械整体结构图
采集机构由皮带和主从动辊筒构成,采集机构角度可调,适应不同水面操作。辊切及挤压收集机构传动采用齿轮机构,保证传动比确定,运动传递稳定。
整体控制采用蓝牙通信模块、4G 网络无线模块,实现远程操控,利用网络可用手机APP 控制,操控方便,极大程度减少人力投入。
该机械采用船体作为承载体,其上安装有螺旋推进器,通过控制器、4G 网络信号、手机APP 可以实现较广阔水域遥控作业。前端皮带传动采集水面浮游植物,通过带孔皮带将浮游植物传输至挤压导轮,同时有效过滤植物积水。通过导轮旋转将采集的植物递送至切段滚轮及挤压滚轮,完成分切、挤压,然后输送至螺旋推进机构。
螺旋推进机构由单独电机提供动力,将分切、挤压后的植物传输给下方的平面滑块机构,最后由平面滑块机构完成采集植物的收集。
3 主要部件及结构设计
3.1 采集机构设计
采集机构采用带传动方式,选取调速直流减速电机作为动力元件,选用50 mm 直径的空心辊筒,皮带采用聚酯材料制作,表面做有若干凸棱和孔,利于水生植物收集的同时顺利将余水排出。在辊筒支撑位安装轴承,电机轴通过联轴器与皮带主动辊筒连接,驱动带传动完成前段采集工作,有效将采集植物输送至切段辊压机构。
3.2 辊切挤压机构设计
如图2 所示,挤压导轮主要功能为将采集装置采集的浮游植物进行第一次挤压并输送给切段辊筒,实现滚切的顺利进行,在两导轮之间设计有2 mm 间距,避免滚切时植物过多导致堆积或缠绕。其结构由两根光轴辊轮组成,在轴径上安装有外啮合齿轮,通过齿轮驱动主、从动导轮运转实现功能。

图2 辊切及挤压机构图
辊切机构由一个附带刀片的切段辊筒、一组直径76 mm 的主从动挤压辊筒组成。其中一根挤压辊筒采用压花工艺,在辊筒上方通过机架固定安装有导板,防止缠绕。切段辊筒由直流电机驱动,采用碳钢材料制作,刀片采用304 不锈钢材料,通过螺栓连接于切段辊轮上。此部分结构完成植物分段切割工作,主从动挤压辊筒由一个直流电机驱动,通过齿轮传动,将分段切割的植物辊压输送至传输收集机构。
3.3 传输收集机构
传输收集机构处于整个机构下方,由推进螺杆(如图3 所示)和平面滑块机构组成。推进螺杆由直流电机驱动,完成切段后植物的二次挤压、推进,于推进螺杆下方安装布置平面滑块机构,将完成切段、挤压后的植物进行收集,便于后期处理或二次利用。

图3 推进螺杆
3.4 船式浮动载体选用
水面浮动载体采用全新聚苯乙烯EPS 颗粒泡沫材料,单体承重达到100 kg,本产品结构采取双体形式。总体安装布置上将采集、辊切挤压、传输收集机构通过支座安装于浮动载体上。在水面浮动载体尾端,安装两个船用推进器,实现载体在水面的正常行驶。
3.5 电路搭建及远程控制
整体设备电源采用12 V 直流蓄电池,设计续航时间为6 h。电路搭建及远程控制设计部分主要由以下几块组成。
船式浮动载体控制电路,采用蓝牙通信模块,控制两个推进器电机旋转,分别实现直线、转弯、掉头行驶。采集、辊切挤压、传输收集机构由多组直流减速电机驱动,其控制电路采用速度调节模块实现电机转速调节。此控制部分通过搭建4G 网络无线通信模块,将电机控制与模块连接,实现远程控制。同时应用互联网技术,实现手机APP 远程操作控制。
4 机构运动部件设计及分析
4.1 传输收集平面滑块机构运动分析
4.1.1 自由度计算
传输收集平面滑块机构简图见图4,其自由度计算如下:

图4 平面滑块机构自由度
式中:n=3,PL=4,PH=0。
故得到
4.1.2 平面滑块机构压力角与自锁分析
平面滑块机构以曲柄为主动件时,最大传动角为90°。平面滑块机构的运动特性中,以曲柄为主动件时,没有急回特性,极位夹角为0°。机构不会自锁。如图5 所示。
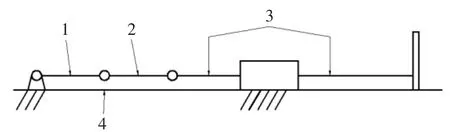
图5 平面滑块机构极限位置
4.2 齿轮传动机构
整个设备齿轮传动部分主要集中于辊切挤压机构,电机将输出轴的运动通过齿轮传递到切段辊筒、主从动挤压辊筒,在切段辊筒轴另一端安装齿轮同步将运动传递给导轮。
电机主轴转速为200 r/min,通过三个齿数45、模数2 的齿轮和一个齿数17、模数2 的惰轮传递运动,实现切段辊筒、主动挤压辊轮转速一致,方向一致。其传动图如图6 所示。
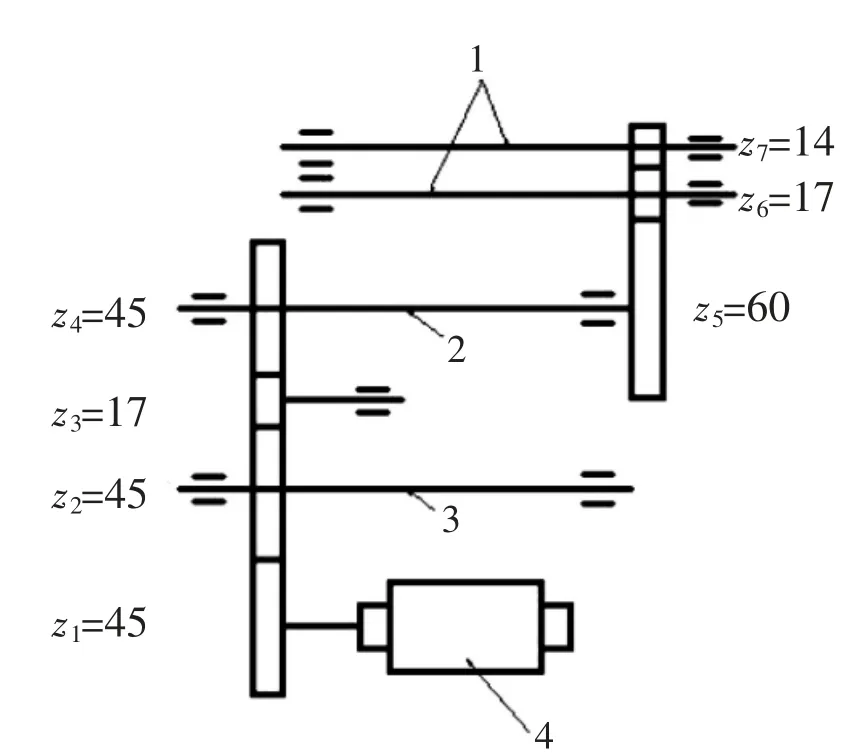
图6 齿轮机构传动示意图
5 试验验证
机架材料采用Q235 型材,其承载采集机构、辊切挤压机构、传输收集机构,并将之连接起来。在实验环节通过静载荷受力分析,机架主要要保证连接件安装稳定。故对机架利用三维设计软件建立模型并作必要受力分析。通过软件模拟施加载荷3 000 N 力,机架应力如图7 所示,机架变形在要求范围内,满足设计要求。在实际验证过程中,机架以及其他机构安装在船式浮动载体上,浮动载体承重能力达到100 kg,能够满足承载要求。
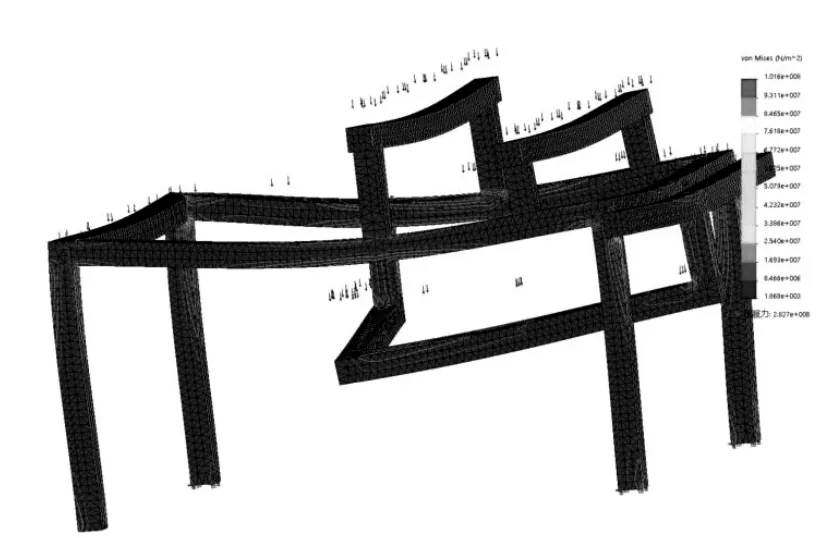
图7 机架应力分析图
6 结论
(1)基于UG 软件设计并构建了浮游植物清理机械主要结构件及运动部件模型,对各部分进行了虚拟装配,并对运动构件进行了运动仿真分析,对承载结构件进行了应力应变分析,证明了该设计符合相应技术要求,提高了工作稳定性。
(2)浮游植物清理机械采用电机驱动方式,结合网络通信模块控制船式浮动载体运动,可以适应池塘、水库、湖泊和流速缓慢的小河等不同水域,开展水生浮游植物收集。同时在船体上可设计加装水质检测装置,用于水体水质采样检测,也可以拓展安装4G 视频检测装置,实时远程监测、巡航作业。
(3)结合浮游植物的生长特性,对采集、挤压、切割等部分结构提供了有效设计方案,通过试验有效证明了该设计的可行性,为今后进一步研究提供了基础。