基于闪电搜索的多传感器交叉提示算法
2024-01-17韦道知李俊伟谢家豪
韦道知,李俊伟,李 琦,谢家豪,刘 丹
(1.空军工程大学防空反导学院,陕西 西安 710051;2.航天工程大学,北京 101400)
0 引言
在研究传感器分配管理时,一般将重点放在静态决策上,而对传感器探测联盟组建后的执行调度过程研究较少。实际作战环境瞬息万变,而前后两种探测联盟方案没有关联且多数传感器管理方法只追求传感器网络效能最大化,没有针对实际需求来对传感器进行优化,没有考虑实战条件,造成传感器资源浪费。文献[1]针对以上问题提出了多传感器交叉提示技术并给出了其定义、作用以及目的。
而针对交叉提示问题的求解归属于协同任务规划范畴,其算法有很多,如:双边组合拍卖算法[2]、模糊控制算法[3]、利用禁忌表进行求解[4-5]、粒子群算法[6]、博弈论算法[7]。
本文介绍了交叉提示的基本理论,并深入研究交叉提示技术在探测、跟踪目标和目标交接中的应用,而后提出一种基于闪电搜索(LSA)的交叉提示算法,并将该算法和基于人工蜂群算法以及博弈论算法进行了对比。
1 传感器交叉提示理论基础
1.1 交叉提示网络
传感器网络,是由部署在多维空间中通过各种通信协议连接而成,可以实现探测目标的各种类传感器组成的系统。传感器网络节点经常使用光电传感器,通常有卫星、飞机、舰艇或地面雷达等,而网络边缘由能够实现互相通信的传感器节点相连完成[8-9]。
传感器组网多数分为三级,分别是以天基传感器(高段)、空基传感器(中段)以及地(海)基传感器(低段)三级组成的网络。天基传感器主要有导航卫星(北斗卫星导航系统)、通信卫星以及国际尖端技术的红外预警卫星等;空基传感器有各种类预警机,以及近年新兴起的临空飞行器等;地(海)基传感器主要由各种类雷达系统组成[9]。
对于传感器的部署,不可能是所有探测区域“一碗水端平”同等部署,而是采取重要区域重点部署的策略,如重要城市、军事基地等重要地域周边应当部署较多雷达,同时雷达之间发生交叉提示的频率也应较高,以此避免传感器资源的浪费。综上所述,传感器网络显然是具有社区性的,所以建立的传感器网络模型应当是基于社区网络模型的,如图1所示。
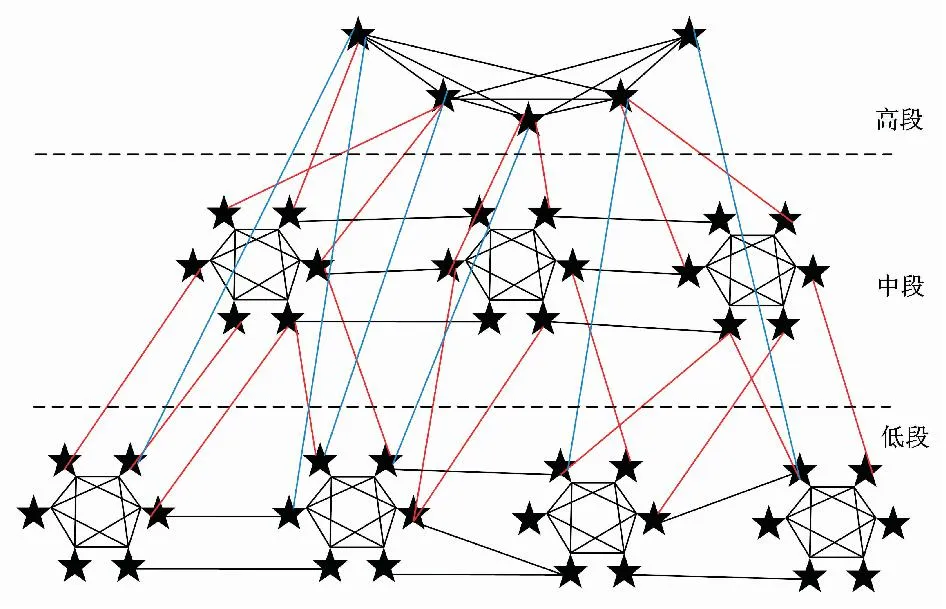
图1 传感器网络结构Fig.1 Sensor network structure
各种类的传感器有不同的特点、部署成本以及实际作战环境,在重要地域周边部署地(海)基雷达,中、高段部署的传感器主要目的是增大传感器网络探测覆盖面积,从而对目标实现快速探测以及“无缝”交接目标。
1.2 基于MAT的交叉提示结构
从地理位置上看,传感器在实际作战环境的分布同时具有“集中性”和“分散性”,前者指的是传感器均以信息融合中心为载体集中分布,并且受所属信息融合中心的控制管理[10];后者指的是传感器分布在立体空间中的不同段,占据的空间范围大,通过内部信息网连接成庞大的立体探测网络。基于多Agent代理技术的传感器分布式管理结构如图2所示。
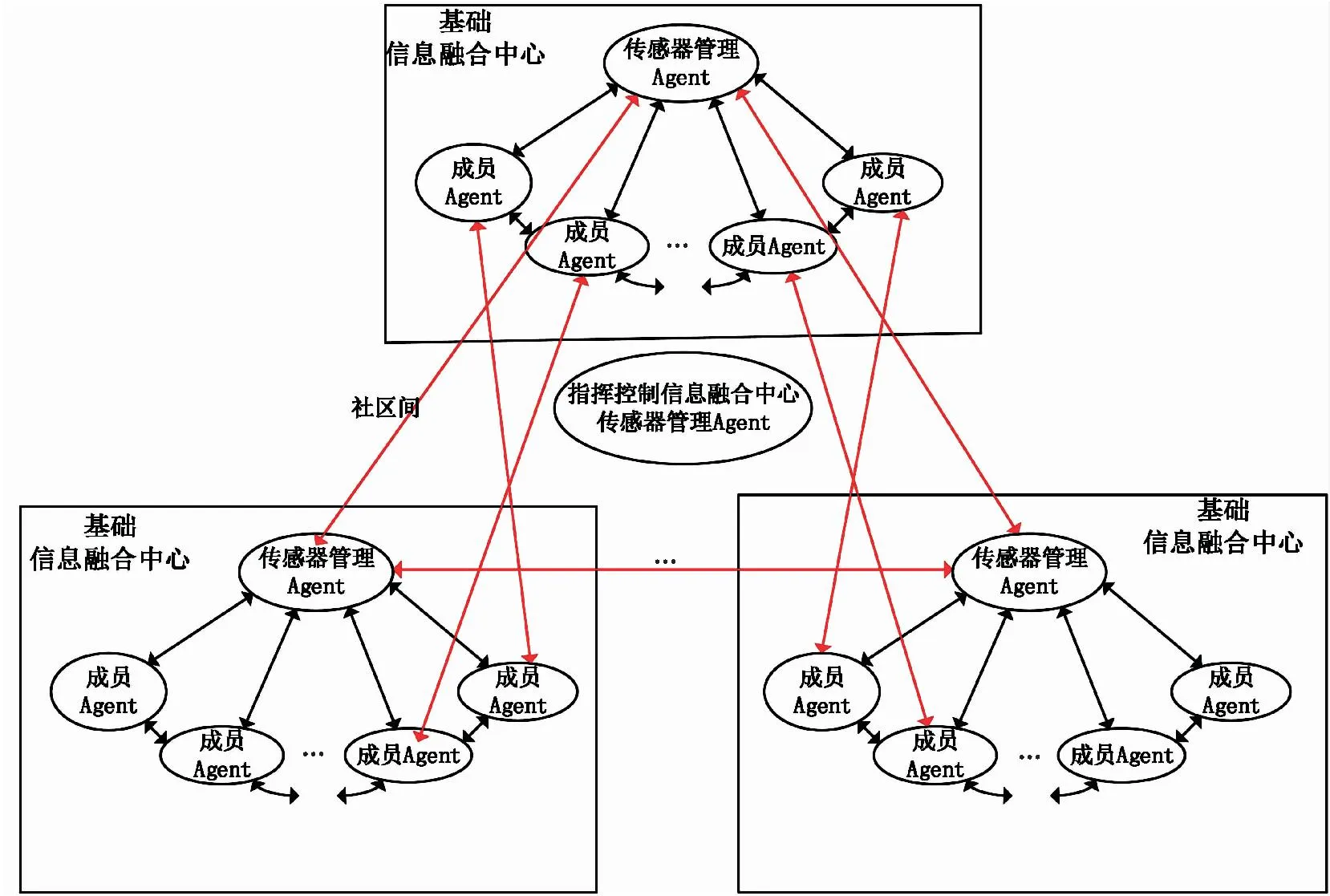
图2 多传感器分布式管理结构示意图Fig.2 Schematic diagram of multi-sensor distributed management structure
图2中,信息融合中心采用了两种Agent:传感器管理Agent与成员Agent。前者多由信息融合中心的指挥控制系统充当,主要有两个“责任”:1) 根据指挥控制信息融合中心传感器管理的指令和其他基础信息融合中心的传感器管理Agent进行交互,实现各个基础信息融合中心之间的任务协同与交叉提示;2) 对各个基础信息融合中心的传感器成员进行指令分配,同时监控所属传感器成员对指令的执行以及作为不同基础信息融合中心的个体传感器进行交互的中间“桥梁”。后者可以是单个传感器,也可以是传感器组合,主要是执行传感器管理Agent分配的指令,它们之间也可以通过通信与协调实现基础信息融合中心内的任务协同与交叉提示。信息融合及处理模型如图3所示。
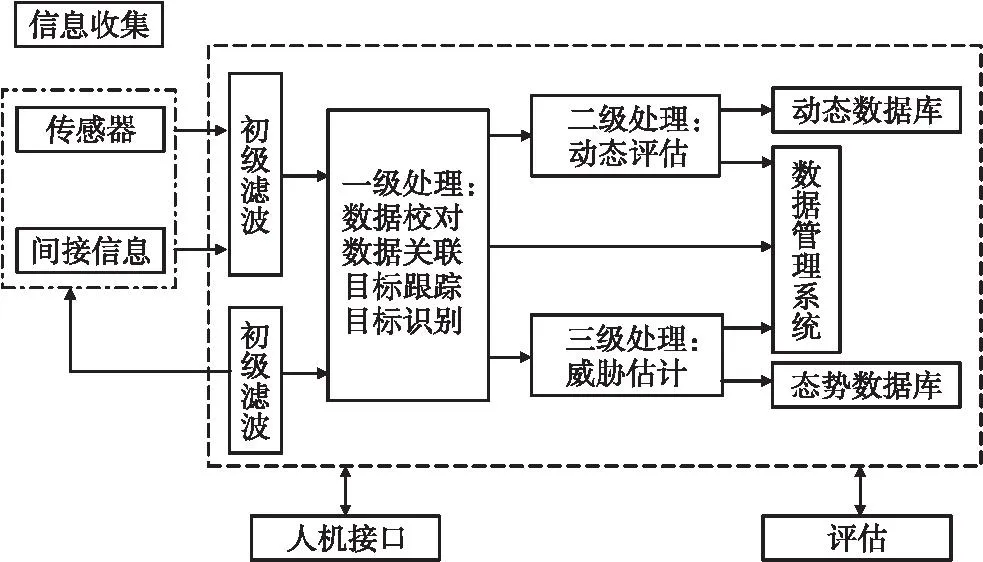
图3 信息融合处理模型Fig.3 Information fusion processing model
1.3 交叉提示内容以及条件
自动触发交叉提示[11]的内容是关于目标综合信息等内容,主要包括:1) 执行的具体任务;2) 发出提示信息的传感器位置信息;3) 传感器探测到的可疑目标或区域信息。
而传感器自动开始进行提示,需要满足交叉提示的条件,交叉提示的条件描述了传感器网络什么时机需要各传感器进行提示,可以概括为,当网络中的某一传感器捕捉到了潜在目标时,信息融合中心会根据目前所获得的目标信息进行综合研判:1) 是否满足信息融合中心先前设置的期望性能指标;2) 当前传感器对目标的探测、目标的跟踪还在不在范围内,从而确定需不需要对该目标进行交接,交接需满足① 该目标将脱离当前传感器探测范围,② 出现优先级更高的目标在当前传感器探测范围内且该传感器同时只能探测、跟踪一个目标,③ 当前传感器出现故障警告或者受到敌方武器威胁即不能正常工作时。
综上所述,如果信息量没有达到期望性能指标以及目标交接条件时,各传感器之间就需要交叉提示以此获取更详尽的信息去正确探测目标、提高识别准确度以及跟踪精度。
2 建立交叉提示模型
2.1 传感器网络效能模型
假设某网络中一共有m个传感器{a1,a2,a3,…,am},同时对n个目标{b1,b2,b3,…,bn}进行探测,传感器与目标配对矩阵为P,元素为pij,
若pij=1,那么传感器ai取得的效能为
eij=αrij+βcij,
(1)
式(1)中,α、β为加权系数,且满足α+β=1;eij为ai的效能;rij为探测收益,当传感器对目标检测时,rij为探测概率rdij,当传感器对目标进行跟踪时,rij为跟踪精确度rlij;cij为能耗。
2.2 检测模型
当网络中的传感器探测到目标后,会先对目标进行检测。假设同时有M个传感器对目标nj的协同检测概率为
rdkj=1-(1-r1j)·(1-r2j)·…·(1-rMj),
(1≤k≤M)。
(2)
此时,传感器对目标的探测概率为M个传感器同一时间对目标的协同探测概率rdkj。
对目标进行探测时,网络对目标的探测概率Pt≥Δ时(Δ为门限值取0.85),那么就认为网络可以准确地判别目标的敌我身份。
2.3 跟踪模型
当完成对目标的探测后,若判定为具有攻击性的目标,则网络将会继续对该目标进行跟踪从而进一步判断是否为虚假目标,若是虚假目标则网络会放弃对该目标的继续跟踪。本文中定义跟踪精度为位置精度衰减因子的负数,公式为
(3)
式(3)中,tr为求迹运算符号,P(k|k)为k时刻的目标估计误差协方差矩阵(covariance matrix)。
对目标nj跟踪时,精度计算模型应当分为两种情况:1) 仅有一个传感器对目标进行跟踪;2) 多个传感器同时对目标进行跟踪。本文中是以多传感器为基础,因此讨论第2种情况。
多个传感器同时对目标进行跟踪即多传感器信息融合问题。假设有M个传感器在同一时间对目标nj进行跟踪,给出各个传感器对此目标的测量方程:
(4)
设
(5)
则有
Ck=TXk+Zk。
(6)
而在跟踪目标中,使用拓展Kalman滤波方式估计目标状态[12],传感器对目标的探测概率为rdkj,则修正Kalman滤波迭代式为
(7)
这时,传感器ai对目标nj的跟踪精度为M个传感器同时探测目标的协同跟踪精度rlkj。
2.4 交接模型
目标在移动过程中,一旦要脱离某传感器探测区域时,就会请求“任务提示”,提醒其他的传感器继续对该目标进行探测,从而达到交接目标的目的。
假设在某k时刻,目标和ax的距离为dx(k),和ay的距离为dy(k);在k+1时刻,目标和ax的距离为dx(k+1),和ay的距离为dy(k+1)。
ax对目标进行探测时,满足式(8),将会请求“任务提示”。
(8)
ay满足式(9)时,表示有接替ax从而继续对目标进行探测的能力。
(9)
式(9)中,Ax,Ay分别为ax,ay的探测区域。
3 交叉提示算法
3.1 算法原理以及建立算法模型
3.1.1放电体的梯级先导传播
在闪电搜索算法[13-14]中,放电体定义为:源于雷电自然现象,并基于梯级先导传播机制的闪电快速粒子。其概念与PSO算法中的“粒子”和GSA算法中的“个体”等类似。
假设每个放电体包含一个梯级先导和一个独有通道,则有表1所示对应关系。
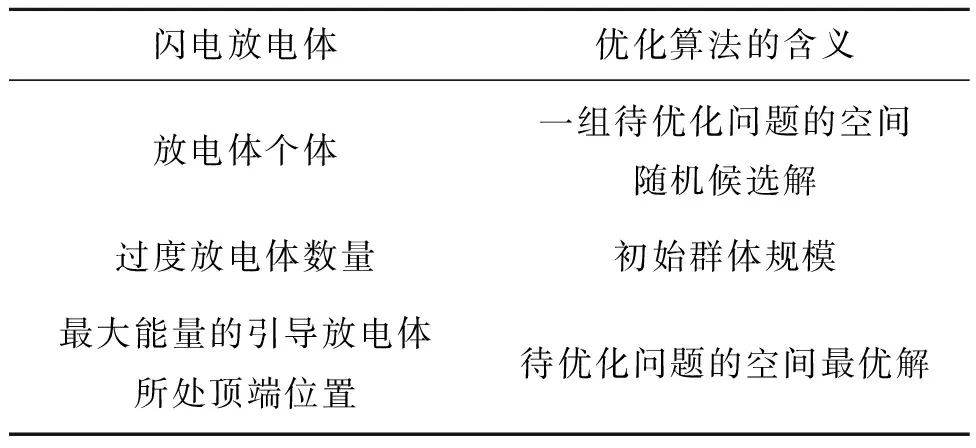
表1 闪电放电体与优化算法的对应关系Tab.1 Correspondence between lightning discharge body and optimization algorithm
3.1.2放电体特性
通常条件下,穿过大气的放电体与空气中的分子与原子发生弹性碰撞时将会失去其动能,放电体的速度可表示为
(10)
式(10)中,vp和v0分别表示当前速度和初速度,c和Fi分别表示光速和恒定电离速率,m和s分别表示放电体质量和放电体所行进的路径长度。
式(10)清晰地表示了速度是梯级先导顶端位置能量和放电体质量的函数,即质量小或行进路径长时,放电体基本上不会电离或者拥有探测大空间的潜质,只能够电离或者开发附近的空间。综上,LSA算法可以通过使用梯级先导的相对能量来控制算法的探测与开发能力。
梯级先导者还有一个重要特性是分岔,即同时出现两个对称的分支。在此期间创建的任意通道都会使得放电体的数量增加一个,因而就会增加群体的大小。LSA算法中可以通过两种方法实现分岔。
1) 创建对称通道,使用式(11)实现两个相对的放电体碰撞。
(11)
2) 第二类的分岔中,由于在多次传播试验后最不成功的引导者能量会再分配,即可以假定通道出现在成功的梯级先导者顶端。通道时间定义为允许的最大试验次数,这样就可以实现重新分配不成功的先导者。这种情况下,阶梯先导的种群规模不会增加。
两种分岔方式中,本文采取第2种分岔方式。
3.1.3建模以及梯级先导移动

(12)
式(12)中,xt为可提供候选解即梯级先导si的初始顶端能量Esi的随机数,c和d分别为解空间的边界范围。
(13)

(14)
式(14)中,exprand是一个指数随机数。

3) 引导放电体。利用具有形状参数μ和尺度参数σ的标准正态分布生成的随机数进行建模,它的正态概率密度函数f(xL)表述为
(15)
式(15)表述了随机生成的放电体可以从形状参数定义的当前位置搜索所有方向。这个放电体还拥有由尺度参数定义的开发能力。在LSA中,用于引导放电体pL的μL被视为pL,且尺度参数σL随着它的朝向地球方向的进程或找到最好的解从而以指数规律减小。这样,pL在t+1次迭代中位置可写为
(16)

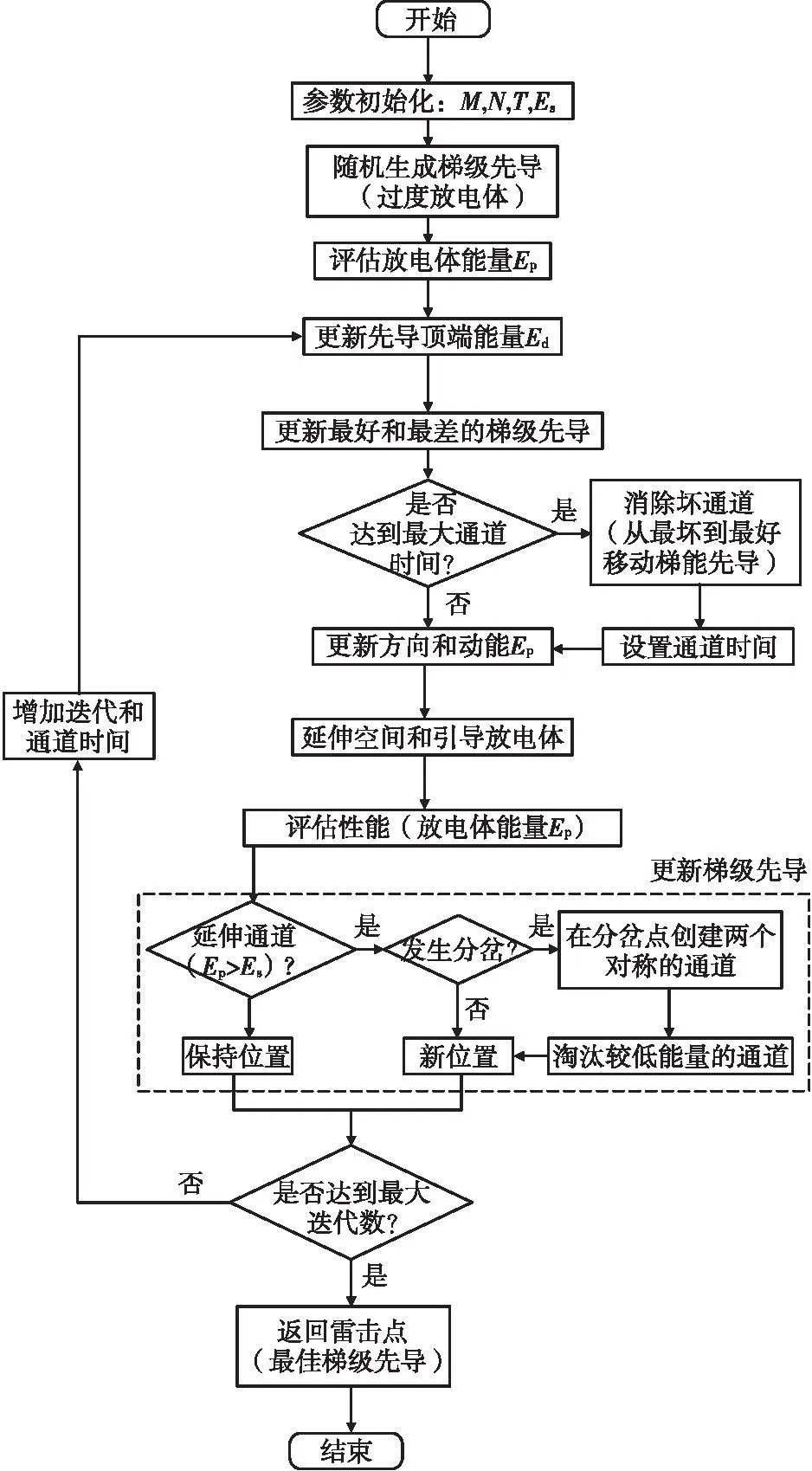
图4 闪电搜索算法的实现流程图Fig.4 Flow chart of lightning search algorithm implementation
4 仿真实验
假设我方军事基地坐标为(1 900,1 900),网络中的传感器特性在表2呈现。若某一时刻网络中出现了5个目标,分别为敌方侦察机、预警机、轰炸机、歼击机以及虚假目标,初始位置分别是(100,550),(450,450),(650,200),(700,150),速度分别为720,800,1 100,2 000 km/h,速度方向都是由初始位置直接指向我方军事基地,位置示意如图5所示。
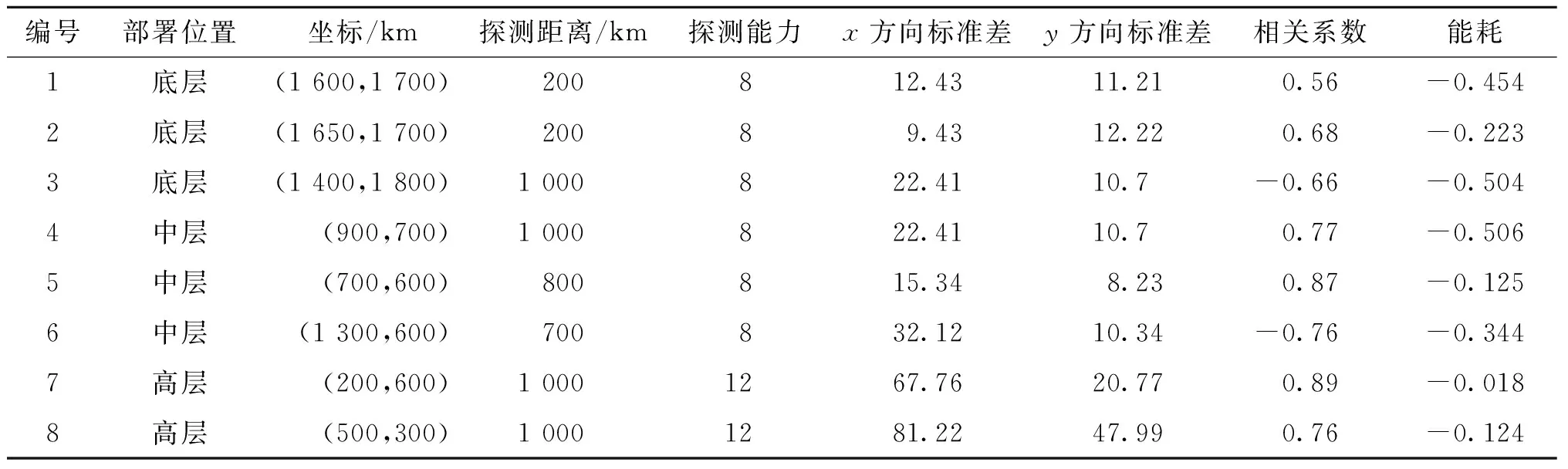
表2 传感器特性以及部署坐标Tab.2 Sensor characteristics and deployment coordinates
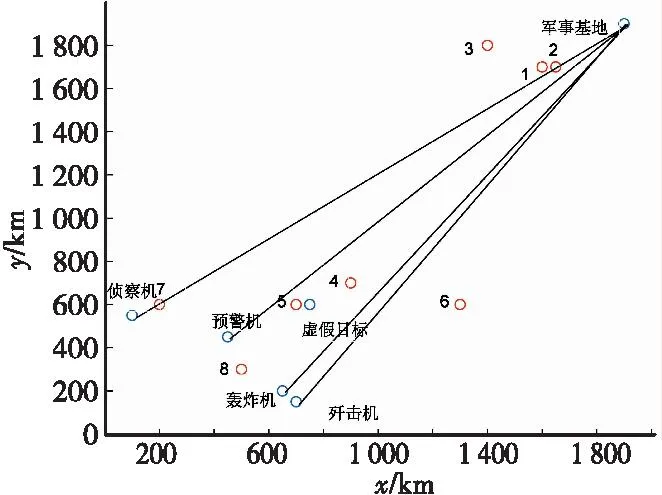
图5 敌我作战态势Fig.5 Combat situation between us and enemy
各传感器对不同目标的探测概率为
(17)
式(17)中,第i行第j列元素rdij是传感器ai对目标bj的探测概率。
4.1 面向探测目标的交叉提示
当k=0时探测情况如表3,将分布式和集中式算法[15]进行对比,分布式算法使用并行计算方法,求解的速度快,但是单个传感器只能掌握局部信息,解的质量比集中式求解要低,所以本文采用的算法同时对比分布式算法求解速度和集中式算法的求解质量[16]。网络对每个目标建立联盟分别探测,同时本文将闪电搜索算法、人工蜂群算法以及博弈论算法求解探测联盟方案[17],进行了100次Monte Carlo实验,网络效能与迭代次数的变化关系如图6所示。
表3 传感器分配情况Tab.3 Sensor distribution
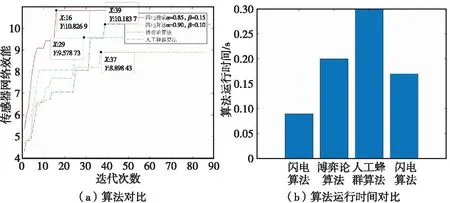
图6 面向探测目标任务的算法对比Fig.6 Comparison of algorithms for target detection task
由图6可知,当α=0.85,β=0.15时,闪电算法与博弈论算法和人工蜂群算法相比,闪电算法求解质量比较高,同时收敛速度最快。探测联盟求解如表4,网络效能为10.826 9。
表4 传感器分配情况Tab.4 Sensor distribution
当α=0.90,β=0.10时,闪电算法与博弈论算法和人工蜂群算法相比,闪电算法求解质量比较高,同时收敛速度最快。探测联盟求解如表5,网络效能为9.578 7。
表5 传感器分配情况Tab.5 Sensor distribution
将两种情况对比后,可知通过适当减小α和增大β,可以提高传感器网络效能同时探测概率没有较大变化。
4.2 面向跟踪目标的交叉提示
假设目标飞行0.1 h即k=0.1,此时对所有的目标探测完毕即虚假目标已被放弃,从而进入跟踪状态,传感器探测情况如表6。
表6 传感器分配情况Tab.6 Sensor distribution
网络对每个目标组建探测联盟进行跟踪,本文分别用闪电算法、人工蜂群算法以及博弈论算法求解联盟方案,进行100次Monte Carlo实验,网络效能与迭代次数的变化关系如图7所示。
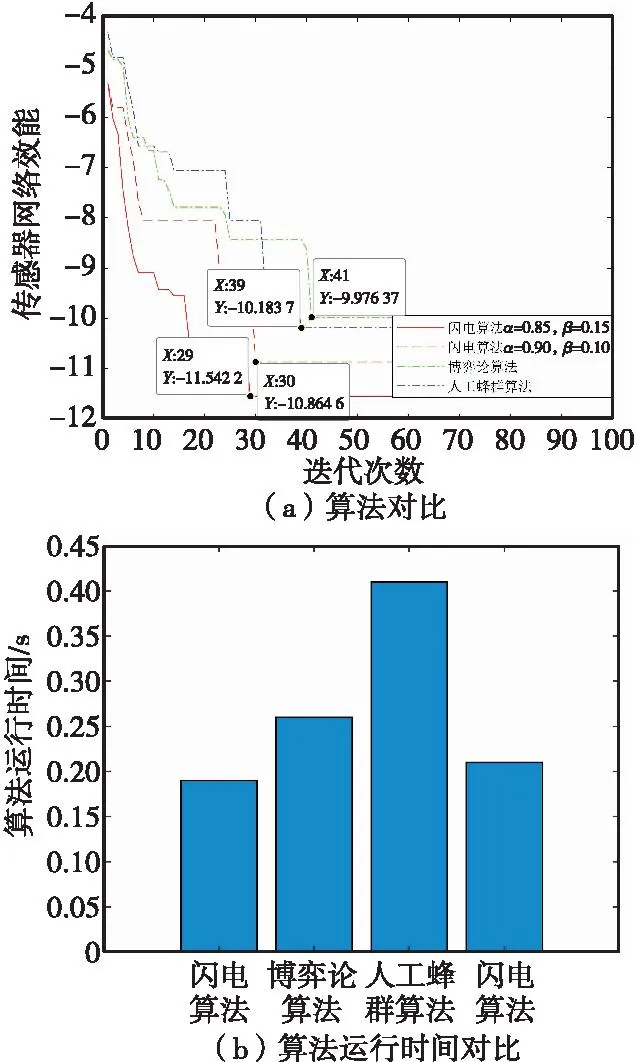
图7 面向跟踪目标的算法对比Fig.7 Comparison of target-oriented algorithms
由图7可知,当α=0.85,β=0.15时,3种算法对比,闪电算法求解质量高且收敛速度最快,能更好地适应实际作战环境。
当α=0.85,β=0.15时,闪电算法稳定后,跟踪敌方侦察机的传感器是a5,a7,跟踪精度为-22.68;跟踪敌方预警机的传感器为a4,a5,跟踪精度为-11.43;跟踪敌方轰炸机的传感器为a6,a7,跟踪精度为-7.08;跟踪敌方歼击机的传感器为a5,a6,a8,跟踪精度为-9.89。传感器网络效能为-11.542 2。
当α=0.90,β=0.10时,算法稳定后,跟踪敌方侦察机的传感器是a5,a7,a8,跟踪精度为-8.78;跟踪敌方预警机的传感器为a4,a5,a7,跟踪精度为-7.43;跟踪敌方轰炸机的传感器为a4,a6,a7,跟踪精度为-7.08;跟踪敌方歼击机的传感器为a4,a5,a6,a8,跟踪精度为-6.19。传感器网络效能为-10.864 6。
两种情况相比较后得到,可通过适当减小α和增大β提高对目标探测的精度。
4.3 面向目标交接的交叉提示
当k=1 h,敌方侦察机的位置为(820,1 270),跟踪该目标的传感器a7,经过1 h,a7与目标的距离为912 km,符合交接条件,此时a7发出请求,而满足情况的传感器为a4,a5,a6。
计算网络效能,综上取α=0.85,β=0.15,对该传感器同样进行100次Monte Carlo实验,效能与迭代次数关系如图8。
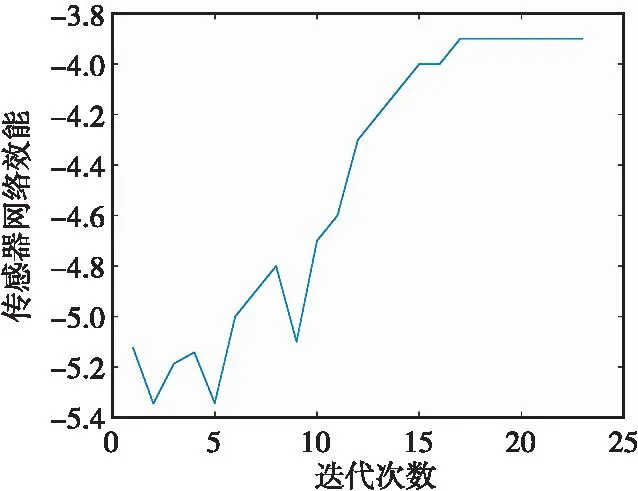
图8 面向目标交接的传感器分配Fig.8 Sensor assignment for target handover
算法稳定后,对敌方侦察机进行跟踪的是a5传感器,网络效能为-3.9,精度为-33.23,最终方案决定后,传感器a7不再对敌方侦察机进行跟踪,从而实现目标交接。
5 结论
本文针对几类典型飞机目标的探测问题,提出了基于闪电搜索的多传感器交叉提示算法。首先建立了基于Agent技术的MAT的交叉提示结构,提出有社区性的传感器网络结构,给出交叉提示发生的条件以及网络效能评价函数,探究交叉提示在目标探测、跟踪以及交接的应用,设计了基于LSA的多传感器交叉提示算法,通过仿真实验验证闪电算法性能优于博弈论算法和人工蚁群算法,有较好的求解质量以及较快的收敛速度。
