基于北斗CORS 的网络RTK 实时定位研究
2024-01-17范志平
范志平
(福建省测绘院,福建 福州 350001)
0 引言
北斗卫星导航系统(Beidou Navigation Satellite System,BDS)是我国着眼于国家安全和经济社会发展需要,自主建设、独立运行的卫星导航系统,是为全球用户提供全天候、全天时、高精度的定位、导航和授时服务的重要空间基础设施。随着各地CORS系统北斗化改造完成,兼容北斗系统的CORS 网络RTK 实时定位服务已经得到越来越广泛的应用。学者对北斗CORS 的应用做了大量研究,叶方宇从固定基线检测精度和实时定位精度两方面分析,结果显示经过北斗增强的福建CORS 系统满足高精度实时定位的要求[1];张乙志等对浙江省北斗地基增强系统在不同的模式下进行网络RTK 测试,结果表明:浙江省北斗地基增强系统试验网基本能达到厘米级精度[2];王涛等对苏州北斗地基增强系统在不同模式进行检测和对比分析得知,兼容北斗的“三星”模式可以提高CORS 系统的精度、时效性、空间可用性等[3];韩红超实测分析了兼容北斗的宁波市CORS 系统的各项技术指标,结果显示:三星系统可以大幅度提高初始化速度和服务可用性,在精度方面与传统双星系统相当[4]。
本文主要研究在仅北斗系统可用的情况下,北斗CORS 在实际应用中的可用性、实时定位精度是否满足实时定位的要求。通过实地采集实时定位数据,分析单北斗模式下的系统可用性、初始化时间、定位精度等指标,并与双星、三星模式进行对比。
1 构建测试网
福建省卫星导航定位基准服务系统(FJCORS)于2017 年完成升级改造,可以接收和处理北斗(北斗一号、北斗二号)数据。针对不同用户,提供实时分米级、厘米级、后处理毫米级等多个层级的高精度位置服务,可为测绘、国土规划、环境保护、变形监测等领域提供高精度的位置服务,如控制测量、海堤海岸线测量、地质灾害监测等。
本文从FJCORS 基准站网中选取10 个基准站组成测试网,同时提供单北斗模式(BDS)、双星模式(GPS/GLONASS)、三星模式(GPS/GLONASS/BDS)等3 种模式的信号源节点,使用RTCM 格式播发差分数据。所选基准站周围观测环境良好、数据完整、质量稳定,满足规范要求。测试网相邻基准站间平均距离54.1 km,最大站间距85.8 km,最小站间距29.4 km,站点分布如图1 所示。
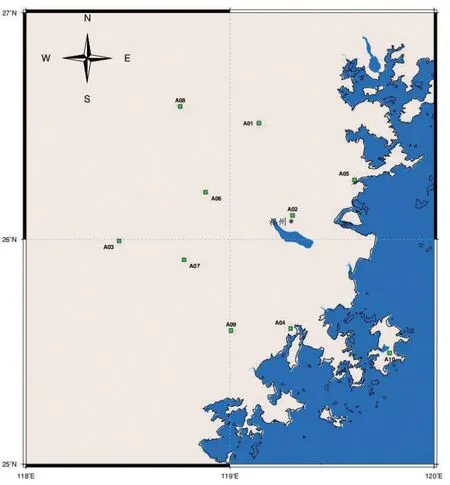
图1 测试网基准站分布图
2 数据采集
本次实测的22 个观测点均匀分布,其中12 个观测点位于测试网内,10 个观测点位于测试网边界和网外20 km 内。其中6 个观测点周围观测环境较为恶劣,建筑物或者树木遮挡严重,其余观测点周围观测环境良好,视野开阔或者只有少量遮挡物。
使用的设备是华测中绘I90,支持三星GNSS 接收机在每个观测点上进行多次观测,每种模式下观测3 组数据,每组观测3 个测回,每测回采集50 个历元数据,采样间隔1 s。每组观测需断开网络并间隔180 s 再重新连接,记录连接时间、初始化时间、观测环境等。若初始化时间超过300 s,则认为该观测点不能固定。
3 实时定位分析
3.1 可用性
可用性是衡量CORS 系统性能的重要内容之一,影响RTK 固定速度和定位精度,根据观测点能否获得固定解来评价可用性。对各观测点所处测试网位置、观测环境、是否固定等进行统计分析,其结果如表1 所示。

表1 RTK 在不同环境下的可用性结果
由表1 可知:从观测环境看,在观测环境良好的情况下,15 个观测点能够获取固定解,固定比例达到90% 以上;在障碍物遮挡较严重的环境下,只有33.3% 的观测点能够获得固定解。从观测点所处网位置来看,无法获取固定解的观测点离基准站较远或者处于网外。结果表明:单北斗模式下,综合固定比例(固定观测点数与总观测点数之比)为77.3%。
3.2 初始化时间
作为CORS 系统中的一个重要质量指标,初始化时间的长短直接关系着外业测量定位的效率。初始化时间可以分为冷初始化时间和热初始化时间,冷初始化时间是从GPRS 连接至CORS 数据中心算起,直到整周模糊度解算完成得到固定解,热初始化时间仅包括整周模糊度的解算时间[5]。所有获得固定解的观测点的平均初始化时间如表2 所示。

表2 初始化时间统计结果 单位:s
由表2 可知:单北斗模式下,冷初始化时间82.4%集中在3~80 s,平均初始化时间为47.1 s。网络RTK 冷初始化时间最短仅3 s,主要原因是BDS01点位周围开阔无遮挡且离基准站较近,可用卫星数较多、差分信号精度高;最长初始化时间为195 s,主要原因是BDS13 观测环境较差导致可用卫星数较少,同时卫星信号接收受阻,延长了整周模糊度的求解时间。热初始化时间整体较短,全部集中在10 s 内。
3.3 定位精度
通常,网络RTK 实时定位的精度评定采用内符合精度和外符合精度2 个指标。内符合精度计算的是观测值的均方根,能够反映实时定位的稳定性;外符合精度统计观测值与真值的差值,能够反映实时定位的准确性。
根据误差理论,内符合精度计算时,先计算每个观测点参与处理的所有观测值的平均值,然后将观测值与该平均值求差,最后统计差值分布概率,计算差值的均方根。计算各观测点的X、Y、Z方向的内符合精度如式(1)所示:
式中:δX为内符合精度;n为观测值总数;Xi为第i个观测值为所有观测值的平均值。
外符合精度通过各观测点的观测值与该点真值求差,然后计算差值的均方根,各观测点的X、Y、Z向的外符合精度如式(2)所示:
式中:φX为外符合精度;n为观测值总数;Xi为第i个观测值;x为观测点坐标真值。
FJCORS 可以直接获得CGCS2000 坐标,因此外符合精度统计的是CGCS2000 系统下的精度,各获得固定解的观测点实时定位精度统计如表3 所示。
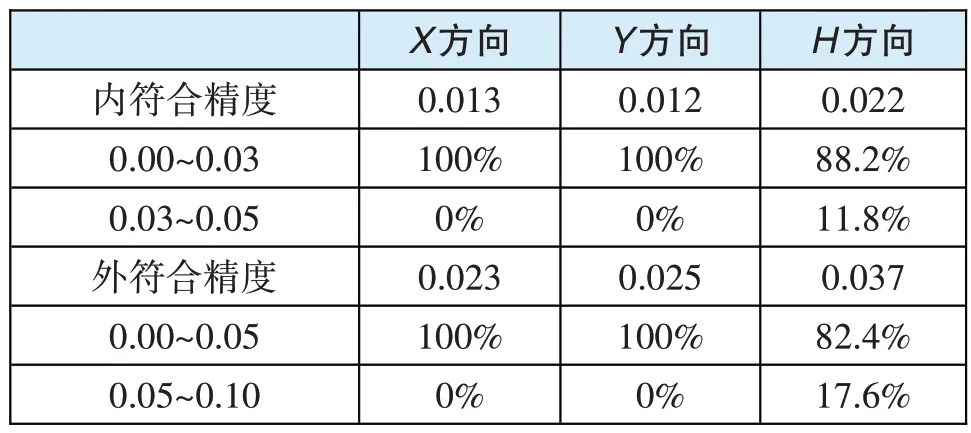
表3 实时定位精度统计表 单位:s
由表3 可知:内符合精度在平面方向上达到了1.8 cm,高程方向88%以上优于2.2 cm;外符合精度在平面方向上达到了3.4 cm,高程方向82%以上优于3.7 cm,均满足网络RTK 实时定位作业要求(内符合平面≤3.0 cm、高程≤5.0 cm,外符合平面≤5.0 cm、高程≤10 cm)。
3.4 多模式对比
经过对3 种模式下采集的数据进行分析处理,对各模式下的可用性、初始化时间、定位精度等指标进行比较,其结果如图2 所示。
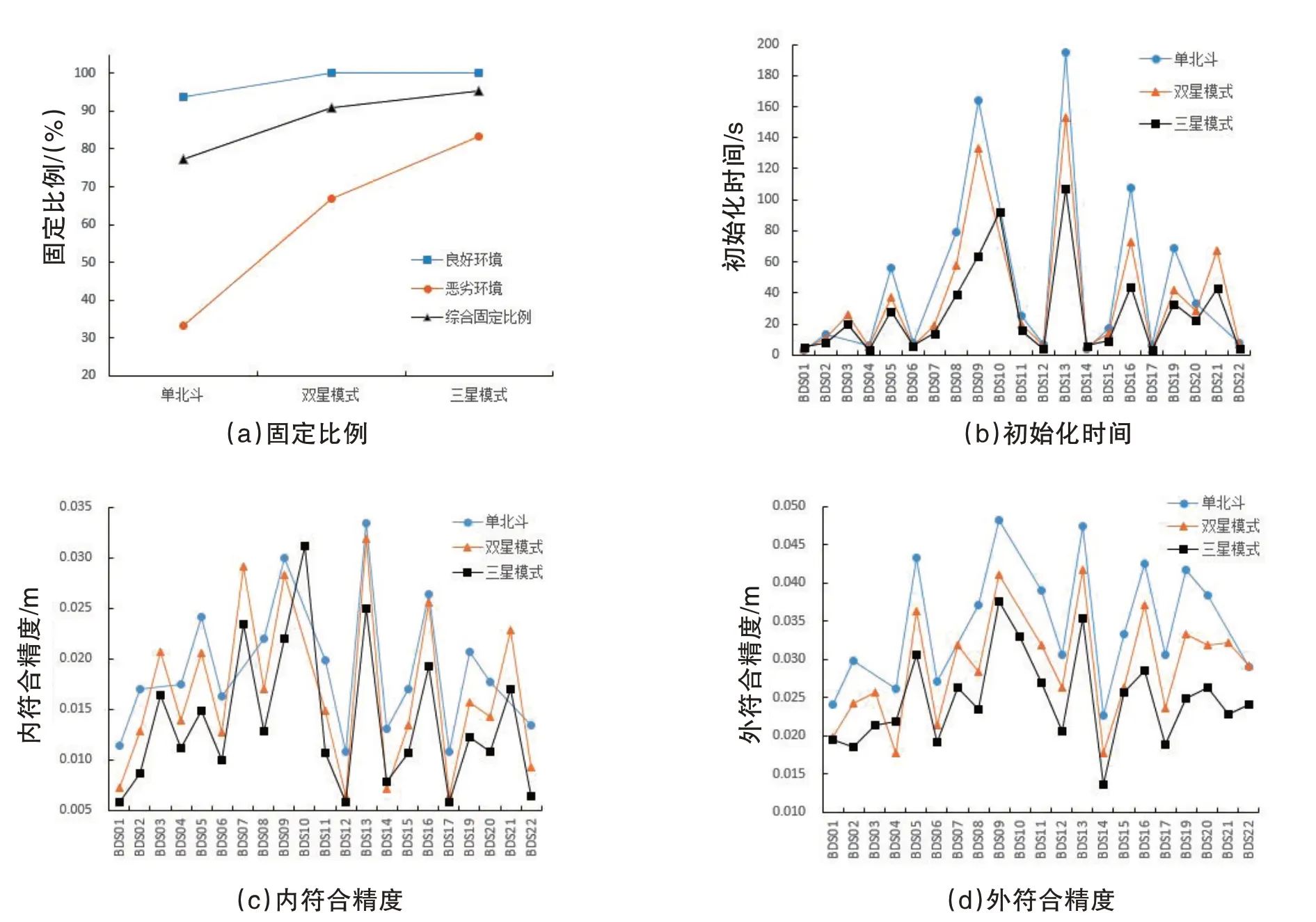
图2 多模式下各指标对比图
图2(a)表明:观测环境良好时3 种模式固定比例均在90% 以上;恶劣环境下,三星模式固定比例最高为83.3%,单北斗为33.3%。综合固定比例单北斗为77.3%,低于双星和三星。图2(b)表明:除了BDS01、BDS14 观测点外,其余各观测点单北斗初始化时间均大于双星和三星;双星和三星初始化时间相差不大。其可能的原因是观测点周围观测环境良好且离基准站较近,可用卫星数量足够解算整周模糊度,而多余的卫星参与解算并不能明显提高整周模糊度解算速度。图2(c)、图2(d)表明:内外符合精度方面,三星与双星基本相当,略有提升,且均优于单北斗。
4 结语
通过北斗CORS 网络RTK 实时定位实测分析,得出以下结论:
1)单北斗模式下,实时定位综合固定比例为77.3%,平均初始化时间为46.7 s。观测点的观测环境、与基准站的距离、处于CORS 网位置(网内、网外)都明显影响RTK 实时定位的固定比例和初始化时间。对于CORS 系统来说,可以通过加密基准站、共享邻省基准站以扩大CORS 网的覆盖范围来提高可用性和效率。
2)从定位精度来看,内符合精度平面方向为1.8 cm,高程方向88%优于2.2 cm;外符合精度平面方向为3.4 cm,高程方向82% 优于3.7 cm,达到规范要求,完全可以满足高精度实时定位的要求。
3)通过多种模式的对比分析,相较于单北斗,三星模式能够提高系统的可用性、时效性(初始化时间)、定位精度。单北斗模式在各方面与双星、三星模式还有一定差距,相信兼容北斗三号后,这些差距会缩小。
