燃料电池增程式动力系统能量管理策略研究
2024-01-16张付军胡博睿张虹
张付军,胡博睿,张虹
(北京理工大学 机械与车辆学院,北京 100081)
当前人类建立在以消耗煤炭、石油、天然气为主的不可再生能源基础之上的经济发展模式,导致了日益突出的环境污染和温室效应问题[1].据统计,燃油车对环境的污染约占总污染源的40%,排放法规的日益严峻和交通行业的“双碳”目标推动燃油汽车的电气化进程[2].增程式电动汽车兼备混合动力汽车和纯电动汽车的优点,既能实现清洁电能的利用,又能保证续驶里程,逐渐成为研究热点[3-4].燃料电池增程式动力系统将蓄电池功率密度大和燃料电池能量密度大的优点相结合,同时解决了纯电动汽车续驶里程短和燃料电池汽车动态响应慢、成本过高的问题.
燃料电池增程式动力系统结构主要由驱动电机、动力电池、燃料电池等组成,各部件参数的合理匹配是整车开发和控制策略制定的必要基础,对于提高整车动力性能和续驶里程具有重要意义[5].张民安等[6]基于恒功率控制策略,以动力电池荷电状态(state of charge, SOC)值作为增程器是否工作的判断条件,对整车动力性和纯电动及增程两种模式下的经济性进行了仿真验证.王旭海等[7]基于开关模式的策略,由动力蓄电池当前的SOC 值确定燃料电池开关的工作状态,根据机车运营工况的不同对SOC值进行设定,使动力蓄电池SOC 值处于最佳工作状态,以延长其寿命.聂立新等[8]基于增程器启动时间及工作模式,提出了功率恒定输出与功率跟随输出相结合的控制策略,实现了对目标里程的优化控制.以上研究均是基于SOC 值进行增程器是否工作的判断及输出功率的计算,没有考虑到车辆不同工况下的需求功率和驱动电机及燃料电池的效率.
文中以某款纯电动客车为研究对象,基于燃料电池增程式动力系统结构,对动力系统各主要部件进行匹配计算和选型,提出开关/功率跟随式能量管理策略.该策略以动力电池组的SOC、当前车速和整车需求功率为输入量,根据车辆的运行模式和行驶工况确定燃料电池增程器的开闭状态和输出功率,基于AVL-Cruise 和MATLAB/Simulink 分别搭建了整车动力系统模型和燃料电池及能量管理策略模型,采用MATLAB DLL 接口实现联合仿真平台的搭建和动力系统的仿真验证.结果表明,搭载所匹配设计的燃料电池增程式混合动力系统的各项性能均达到设计指标要求,且采用文中提出的能量管理策略车辆经济性和续驶里程均优于开关式和功率跟随式控制策略,对城市客车具有一定的实际意义和应用价值.
1 动力系统参数匹配及选型
1.1 燃料电池增程式动力系统结构
增程式电动汽车(extended-range electric vehicles,EREV)一般采用串联式拓扑结构,结构相对较简单,其在纯电动汽车的基础上增加一个增程器,有效解决了一般纯电动汽车行驶路程较短,续航能力不足的问题[9].燃料电池增程式混合动力系统以动力蓄电池为主动力源,以燃料电池增程器为辅助动力源, 燃料电池增程式动力系统结构如图1 所示.当动力蓄电池SOC 值较低或输出功率无法满足车辆行驶工况需求时,启动增程器为动力蓄电池充电或直接驱动车辆,在一定程度上增加了车辆的续驶里程.

图1 燃料电池增程式动力系统结构图Fig.1 Structure diagram of fuel cell incremental power system
1.2 整车基本参数及性能设计指标
文中以某款纯电动客车为研究与改进对象,在已有平台和整车参数基础上对其动力系统部件进行匹配设计.该车基本参数和性能设计指标分别如表1和表2 所示.
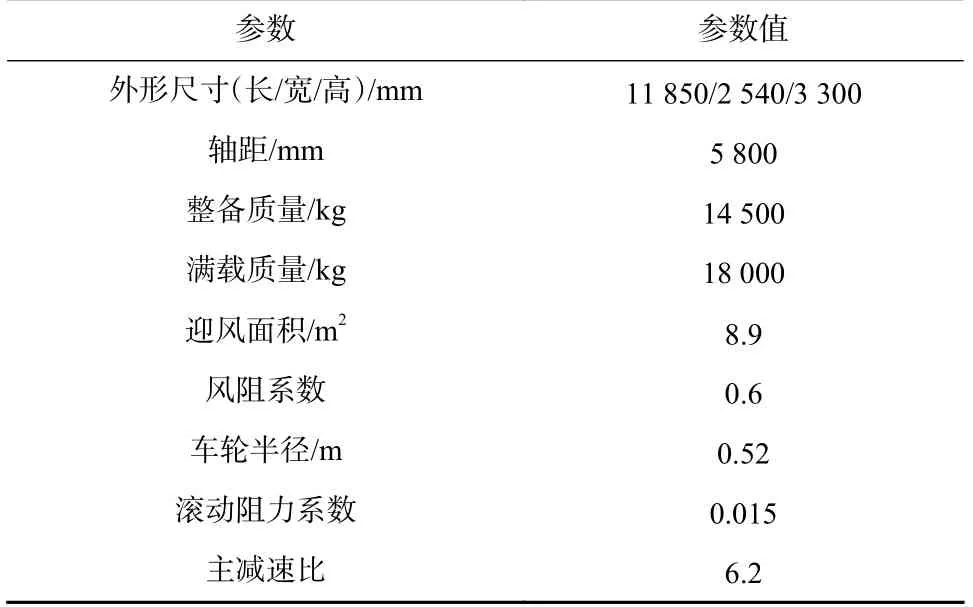
表1 整车基本参数Tab.1 Basic parameters of the whole vehicle

表2 整车性能设计指标Tab.2 Vehicle performance design index
1.3 动力系统参数匹配及选型
燃料电池增程式动力系统主要部件包括驱动电机、动力蓄电池组、燃料电池和储氢瓶.根据整车基本参数(表1)和性能设计指标(表2)对动力系统主要部件进行匹配计算和选型,结果如表3、4 和5 所示.
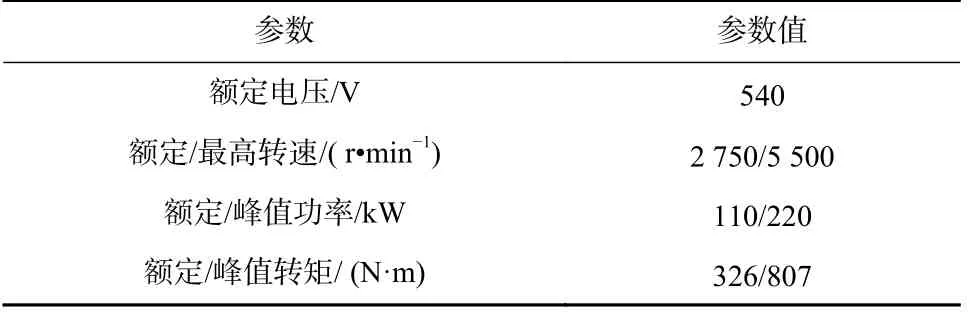
表3 驱动电机参数Tab.3 Parameters of Drive motor

表4 动力电池组参数Tab.4 Parameters of power battery pack

表5 储氢瓶参数Tab.5 Parameters of hydrogen storage bottle
其中驱动电机选择某款永磁同步电机;锂离子电池具有高能量和功率密度、低自放电率和长循环寿命等优点,成为当前电动汽车的主要动力[10],因此动力蓄电池选择宁德时代的某款磷酸铁锂电池,该型号电池单体额定电压为3.2 V,单体额定容量为176 A·h;燃料电池选择某款额定功率30 kW 的囯鸿氢能9SSL 型燃料电池,储氢瓶选择Ⅲ型35MPa 储氢瓶.
2 动力系统建模仿真
2.1 基于Cruise 的整车模型搭建
文中基于Cruise 搭建的燃料电池增程式混合动力系统模型如图2 所示.车辆模块主要包括所研究对象车辆的基本物理参数,包括整车外形尺寸、整备质量、满载质量、风阻系数、迎风面积和滚动阻力系数等.驱动电机模块主要包括所匹配电机的基本参数和转矩—转速特性曲线及效率特性曲线等.动力蓄电池模块主要包括所匹配动力电池组的基本参数和排列方式等.
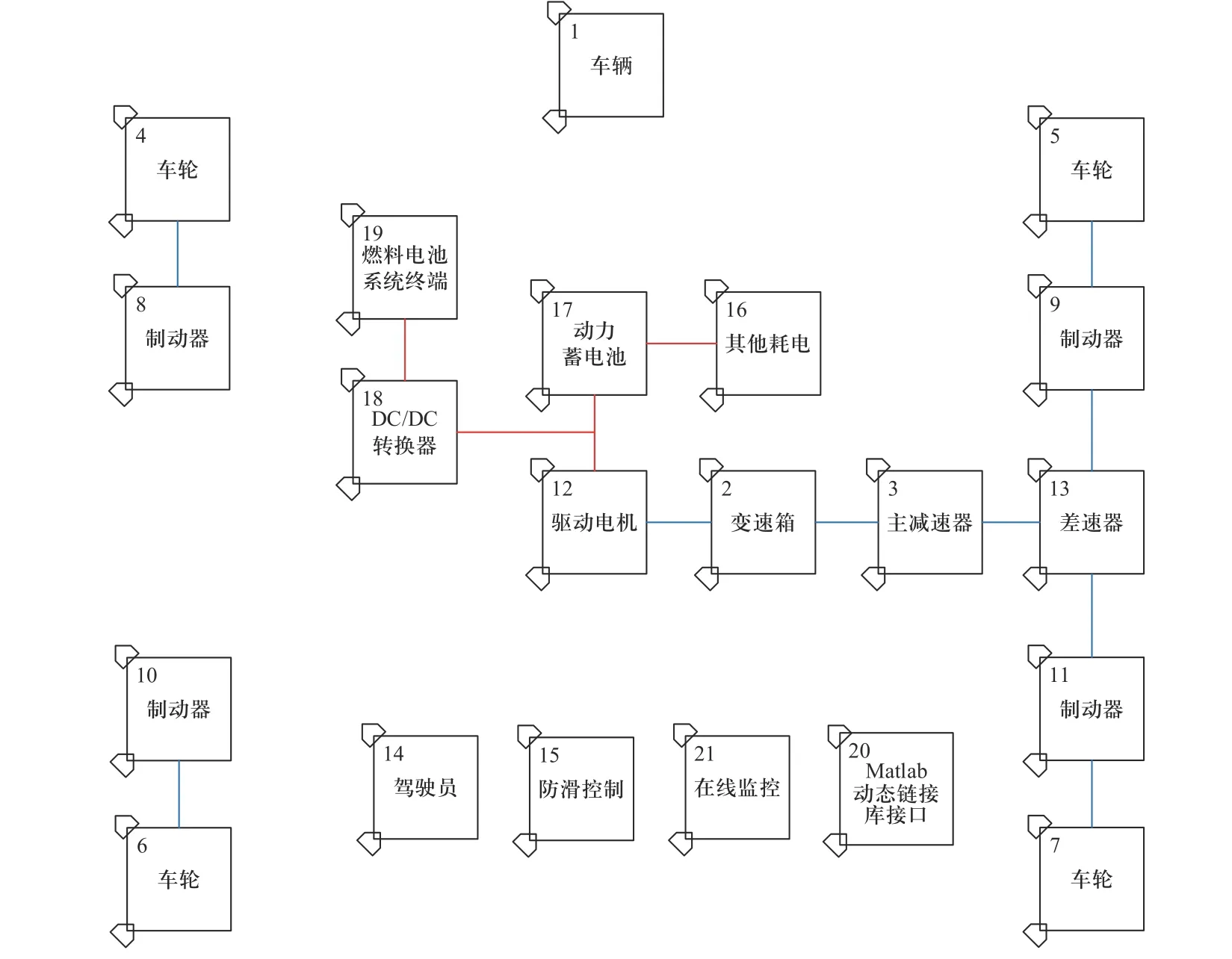
图2 基于Cruise 的增程式燃料电池客车整车模型Fig.2 Whole vehicle model of incremental fuel cell bus based on Cruise
各模块之间的信号连接主要包括机械连接、电气连接和总线信息连接.图2 中单实线所示的连接为机械连接,主要连接的是驱动电机、变速箱、主减速器、差速器和车轮.图2 中双实线所示的连接为电气连接,主要指动力蓄电池、驱动电机、其他耗电模块和燃料电池系统终端之间的电信号连接.数据总线连接主要包括需要进行信号通讯的各模块之间的实时变量和控制信息传递,具有总线信息连接的模块具有彩色箭头的标记.
2.2 基于Simulink 的燃料电池模型搭建
文中采用MANN 等[11]提出的燃料电池输出特性经验公式来建立以电流密度、温度、氢氧分压为输入,电压、功率、效率为输出的燃料电池数学模型.根据该模型表示的质子交换膜燃料电池(proton exchange membrane fuel cell, PEMFC)单电池输出电压Vcell为
式中:ENernst为燃料电池的理论电动势(或热力学电动势);Vact为活化损失电动势;Vohm为欧姆损失电动势;Vconc为浓差损失电动势.
通过上述PEMFC 数学模型的分析,文中建立的PEMFC 模型如图3 所示.
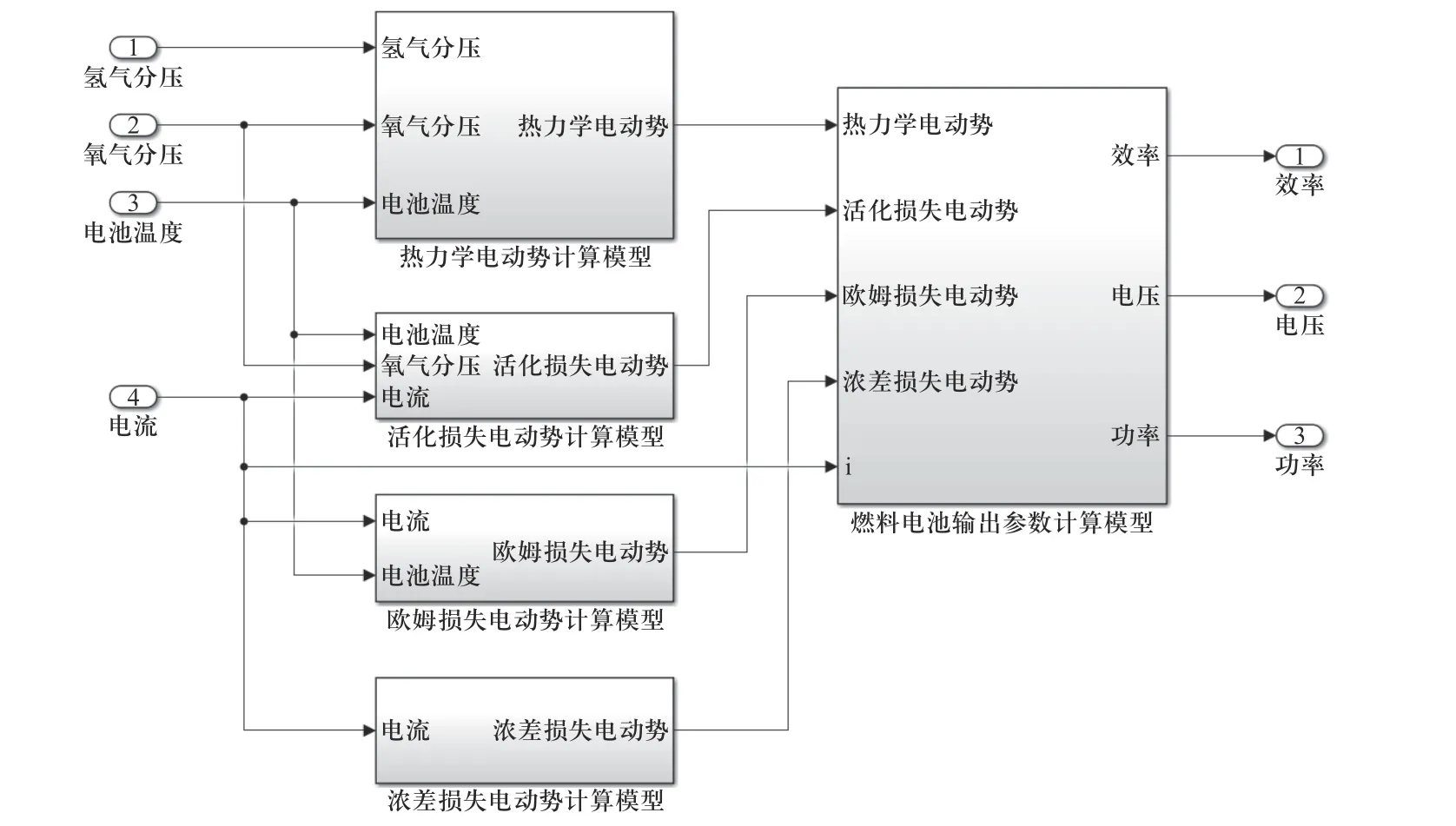
图3 基于Simulink 的PEMFC 模型Fig.3 PEMFC model based on Simulink
图4 所示为燃料电池功率和效率输出特性曲线,由仿真结果可知,该燃料电池模型输出特性与一般燃料电池输出特性一致,输出额定功率达到30 kW,与所选燃料电池额定功率一致,因此,该燃料电池模型可用于后续的仿真计算.

图4 PEMFC 输出特性曲线Fig.4 PEMFC output characteristic curve
3 能量管理策略研究及建模
3.1 开关/功率跟随式能量管理策略建立
能量管理策略是混合动力汽车的核心技术.其主要任务是根据车辆的动力需求、动力系统的运行状态以及不同动力源在工作效率、瞬态响应特性、负载能力等方面的差异协调不同动力源之间的动力分配[12].文中所研究的燃料电池增程式混合动力系统以动力蓄电池为主动力源,燃料电池为辅助动力源.对于这种动力系统的结构,如果单独使用开关式控制策略,可以将燃料电池设定在最大输出功率点或最高效率点工作.如果燃料电池持续工作在最大功率输出点,那么将会大幅度增加氢气消耗量,且会缩短燃料电池的寿命;如果燃料电池持续工作在最高效率点,那么燃料电池所提供的功率无法满足需求车辆在起步、加速和爬坡等需求功率较大的工况,这会使动力电池的放电深度增大,导致动力电池SOC 值下降率较快且续驶里程缩短.对于增程式动力系统来说,功率跟随式控制策略适用于增程器的动态响应特性快且输出功率大的情况,而这恰恰是燃料电池系统所不具备的特点.对于燃料电池增程式混合动力系统而言,能量管理策略应该兼顾上述两种策略的特点,将二者的优势相结合,因此,文中提出开关/功率跟随式能量管理策略.该策略以动力电池组的SOC、当前车速和整车需求功率为输入量,根据车辆的运行模式和行驶工况确定燃料电池增程器的开闭状态和输出功率.
3.2 能量管理策略算法及流程
文中设置SOC 值的下限为40%,当动力电池的SOC 值低于40%时,燃料电池将工作在最大功率输出点;SOC 值的上限设置为80%,当动力电池的SOC值大于80%且需求功率较低时,燃料电池以较低输出功率工作;如果在车辆运行过程中,动力电池的SOC值长时间高于80%且需求功率较低,则燃料电池增程器停止工作.由于文中所研究车辆为城市客车,考虑到城市客车的一般行驶工况可知,其在城市内运行的最高车速通常不超过50 km/h,通过计算可得其最高需求功率不超过54 kW.考虑驱动电机长时间所处的转速范围,在满足转矩需求的情况下,取需求功率的最小值为20 kW 和最大值为36 kW 作为需求功率的临界点,该临界功率点均处于驱动电机的高效区.
定义燃料电池增程器的开闭状态为S.当车辆开始运行时,动力电池组SOC 值较高,此时如果整车需求功率低于20 kW,则燃料电池增程器不开启,即S=0.其余工况燃料电池增程器均为开启状态,即S=1.燃料电池增程器开闭状态随SOC 值和整车需求功率的变化如图5 所示.

图5 燃料电池增程器开闭状态图Fig.5 Open and close state diagram of fuel cell ranger
当燃料电池的工作状态确定后,再由车辆运行模式和行驶工况确定燃料电池系统的输出功率.燃料电池增程器经常需要在为车辆提供动力的同时为动力电池组充电,因此,使燃料电池长时间以高效率工作,减小功率波动成为能量管理策略的重点[13].由燃料电池输出特性曲线(图4)可以看出,当输出功率在5 ~25 kW 范围内时,燃料电池效率均在50%以上.因此,取燃料电池的功率最小值为5 kW,最大值为25 kW.在能量管理控制策略中设定燃料电池增程器的输出功率不低于5 kW,目的是为保证燃料电池在低功率输出时的能效.燃料电池系统的输出功率应适应动力系统SOC 值、当前车速和整车需求功率的变化[14].图6 所示为文中提出的开关/功率跟随式能量管理策略算法流程图.其中,动力电池组充电状态为BSOC;整车需求功率为Pv;燃料电池增程器系统输出功率为Pfc.

图6 开关/功率跟随式能量管理策略算法流程图Fig.6 Algorithm flowchart of switch/power following energy management strategy
3.3 能量管理策略模型及联合仿真平台搭建
开关/功率跟随式能量管理策略有3 个输入量,分别是动力电池SOC 值,当前车速和整车需求功率.其中,动力电池组的SOC 值和当前车速可以通过数据总线传递到能量管理策略模型中,需求功率和氢耗量需要通过计算得到.
作为增程式燃料电池混合动力汽车经济性的衡量指标,氢耗量的计算显得尤为重要.氢耗量的计算通常有两种方法,第一种是电荷法,由质子交换膜燃料电池的工作原理可知,消耗一个氢气分子会产生2 个电子,从而建立氢耗量和电流的关系,该方法适用于计算理论氢耗量.第二种方法是根据能量守恒定律由燃料电池的输出功率和氢气的热值来计算氢耗量,此方法的计算结果是实际情况下的真实氢耗量,因此,文中以第二种方法为建模原理进行氢耗量计算模型的搭建.
根据输入量和输出量之间的算法关系和逻辑控制,基于Stateflow 搭建开关/功率跟随式能量管理策略模型.图7 所示是开关/功率跟随式能量管理策略及燃料电池集成模型.

图7 能量管理策略及燃料电池集成模型Fig.7 Energy management strategy and fuel cell integration model
将集成后的Simulink 模型利用MATLAB 中Min-GW-w64 C/C++编译器生成“.dll”格式的文件,然后将该文件导入Cruise 中的MATLAB DLL 动态链接库模块即可进行MATLAB/Simulink 和Cruise 的联合仿真.图8 所示为联合仿真平台搭建流程.

图8 Simulink 和Cruise 联合仿真平台搭建流程图Fig.8 Flow chart of Simulink and Cruise joint simulation platform construction
4 动力系统性能仿真分析
4.1 整车动力性仿真
在各模块的参数设置完成之后,通过在计算项目目录下的任务文件夹(task folder)中添加全负荷加速(full load acceleration)和爬坡性能(climbing performance)仿真计算任务,仿真计算结果如图9所示.
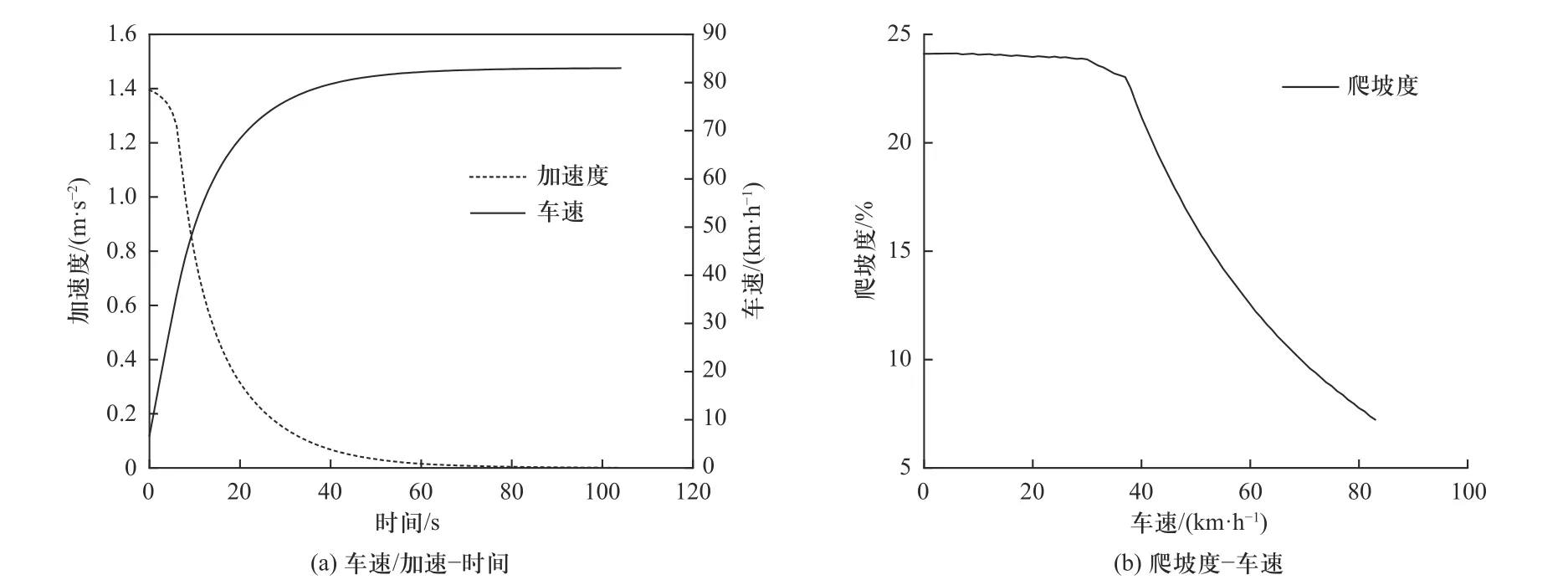
图9 整车动力性能仿真曲线Fig.9 Whole vehicle dynamic performance simulation curve
由图9(a)可得,车辆最高车速为83 km/h,0~50 km/h 加速时间为10.4 s,由图9(b)可得,车辆等速10 km/h 爬坡度为24%,上述参数均满足整车最高车速、原地起步加速时间和爬坡度设计指标.
4.2 整车经济性及续驶里程仿真
文中基于中国城市客车行驶工况CHTC-B 对整车进行经济性及续驶里程仿真.表6 所示为该工况特征参数统计表.该工况路谱总里程为5.49 km,总运行时间为1 310 s.

表6 CHTC-B 工况特征参数表Tab.6 Characteristic parameters of CHTC-B working condition
在文件夹(task folder)中添加循环工况(cycle run)仿真计算任务,将CHTC-B 循环工况输入进循环路谱中,车辆沿路谱行驶状态和整车经济性及续驶里程仿真结果如图10 和图11 所示.
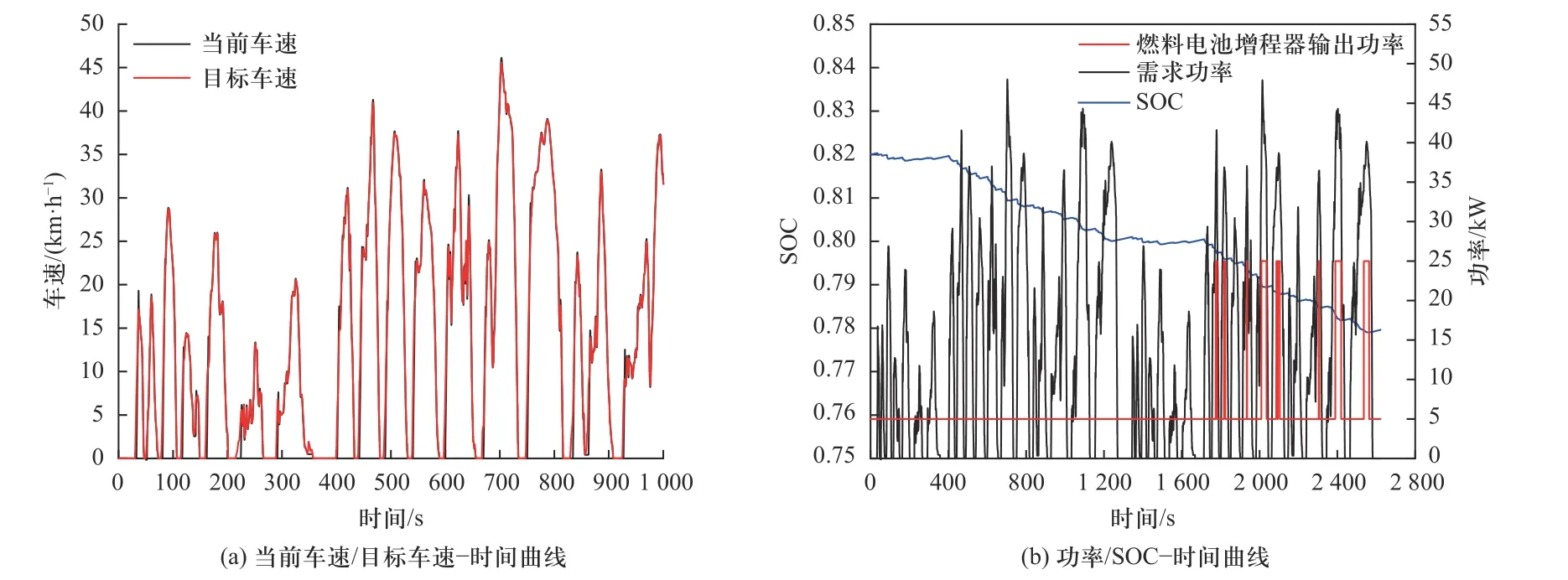
图10 车辆沿路谱行驶状态曲线Fig.10 Vehicle driving state curve along the road spectrum

图11 整车经济性能及续驶里程仿真曲线Fig.11 Simulation curve of vehicle economic performance and driving range
由图10(a)可知,车辆的当前车速与目标车速之间差别较小,说明基于文中所搭建的动力系统模型,在开关/功率跟随式能量管理策略控制下,车辆有较好的路谱跟随性.由图10(b)可知,燃料电池增程器功率能够根据SOC 值和整车需求功率按照所设计的能量管理策略进行输出.综上说明仿真结果能够较真实反映所设计能量管理策略的输出,可以通过仿真结果对该能量管理策略进行评价.
图11(a)所示为开关式、功率跟随式和开关/功率跟随式3 种能量管理策略下SOC 值和氢耗量随时间的变化曲线(单循环),由于动力蓄电池组的SOC值在大多数情况下均处于0.4~0.8 的范围内,因此选择初始SOC 值在该范围内更能反映出3 种策略下整车经济性的优劣,设置初始SOC 为0.7,其性能分析对比如表7 所示.由表7 中的数据可知,在一个CHTCB 路谱循环下,开关/功率跟随式能量管理策略的SOC 下降值最小且氢耗量最低.根据CHTC-B 路谱单循环时间和里程数据进行分析计算可得,开关功率/跟随式能量管理策略在CHTC-B 路谱下百公里氢耗量为2 kg,低于开关式和功率跟随式策略下的百公里氢耗量.

表7 3 种策略整车经济性能对比Tab.7 Comparison of vehicle economic performance of three strategies
图11(b)所示为行驶多个CHTC-B 路谱循环下3种策略SOC 值变化曲线,由图可知, SOC 值由初始值0.85 降低至截止值0.2 时,开关/功率跟随式能量管理策略控制下车辆行驶时间最长,行驶距离最远.分析计算3 种策略控制下车辆续驶里程如表8 所示.
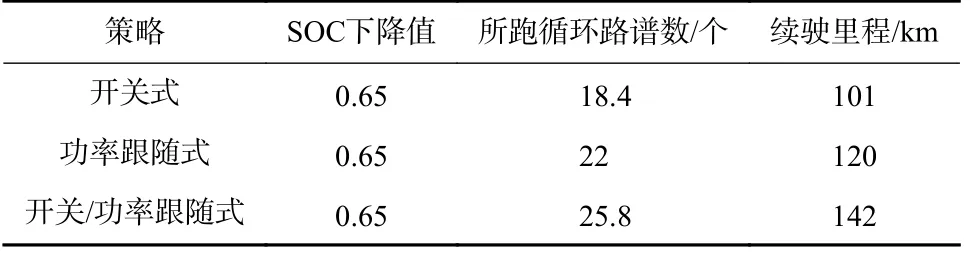
表8 3 种策略车辆续驶里程对比Tab.8 Comparison of vehicle mileage of three strategies
综合对比表7 和表8 数据可知,在开关/功率跟随式能量管理策略控制下,整车基于CHTC-B 路谱工况下百公里氢耗量为2 kg,车辆续驶里程为142 km,满足车辆续驶里程指标,且车辆经济性和续驶里程均优于开关式和能量跟随式能量管理策略,其中车辆经济性相对于开关式和能量跟随式两种控制策略分别提高62%和31%,续驶里程相对于该两种控制策略分别提高41%和18%.
5 结 论
文中以某款纯电动客车为研究对象,结合蓄电池功率密度大和燃料电池能量密度大的优点提出了蓄电池/燃料电池混合动力系统结构,根据性能指标对动力系统各主要部件进行匹配计算和选型.根据车辆行驶工况和运行模式提出了开关/功率跟随式能量管理策略,基于AVL-Cruise 和MATLAB/Simulink建立联合仿真平台对车辆性能进行仿真验证.结果表明,搭载文中所匹配设计的增程式燃料电池混合动力系统的城市客车最高车速为83 km/h,最大爬坡度(等速10 km/h)为24%,0~50 km/h 加速时间为10.4 s,在中国城市客车行驶工况CHTC-B 下100 km 氢耗量为2 kg,续驶里程为142 km,各项性能均达到设计指标要求,且采用文中提出的能量管理策略车辆经济性相对于开关式和能量跟随式两种控制策略分别提高62%和31%,续驶里程相对于该两种控制策略分别提高41%和18%,对城市客车具有一定的实际意义和应用价值.
