多移动机器人固定时间编队控制
2024-01-15李洁师五喜李宝全
李洁,师五喜,李宝全
(天津工业大学 控制科学与工程学院, 天津 300387)
当面对高并行性和高实时性的任务时,多机器人能更好地克服单个机器人的功能缺陷和执行效率低的不足,多机器人系统编队问题因其广泛的潜在应用价值引起了学者们的广泛关注。编队控制是一个典型的多机器人协调问题[1],基于行为的方法[2]控制精度较低,基于人工势场的方法[3]容易陷入局部最小陷阱中,基于虚拟结构的方法[4]通过图论理论把多机器人系统视为刚体,因此任一机器人出现故障都会导致编队失败。由于领航-跟随方法[5-6]容易实现,目前得到了比较广泛的研究。文献[7]在领航-跟随编队问题中用图论方法来表示机器人之间的通信。文献[8]设计了一种能够以任何平滑的领航者轨迹实现编队跟踪控制方法。文献[9]提出了一种利用模型预测控制(model predictive control)和自适应终端滑模控制(adaptive terminal sliding mode control)技术的轮式移动机器人编队复合控制策略。文献[10]在两个不同的自适应耦合增益基础上设计了一种仅依赖于相对状态信息和智能体自身的一般动力学的自适应算法。在文献[11]中,基于领航-跟随者的神经网络自适应观测器将受约束的误差动力学转化为新的二阶欧拉-拉格朗日无约束的误差动力学。但这些领航-跟随编队控制方法都是基于机器人动力学模型设计的。而与动力学控制方法相比,基于运动学模型的控制方法可以降低对机器人的硬件要求,所以此方法也是目前的一个研究热点。文献[12]提出了基于运动学模型具有路径参数同步和干扰抑制的编队系统分布式控制。文献[13]提出了一种基于具有饱和角速度和区间内有界线速度的单循环模型的独轮车运动学模型的新型滑模控制。文献[14] 在领航-跟随策略中,基于每个跟随者未知领航者的完整状态的假设,提出了一种利用机器人间协调误差的分布式编队控制策略。
然而,以上编队控制方法仅仅保证了跟踪误差的渐近收敛。为了获得更快的收敛速度,文献[15]提出了有限时间收敛方法。应用此方法,文献[16] 利用添加功率积分器法和反步技术研制出一组能够保证闭环系统有限时间稳定的齐次控制器。文献[17]为了保持领航-跟随轮式移动机器人系统,提出了基于降低刚度的矩阵估计器和控制器保证在有限时间内收敛,并且可以在代理的局部坐标系内实现。然而,有限时间控制中存在收敛时间依赖于初始条件的问题,而文献[18]提出的固定时间控制方法是解决此问题的有效方法。文献[19]将现有的固定时间控制方法推广到具有死区输入和输出约束的非严格反馈系统中。文献[20]解决了一种不确定链式非完整系统的固定时间控制问题。文献[21]在反步递归设计技术的基础上,设计了一种结构简单的自适应模糊固定时间控制器。但是,这些固定时间控制方法并未应用到多移动机器人编队控制中。
本文提出了基于运动学模型的固定时间编队控制方法。该方法应用领航-跟随法将全局编队任务转化为局部跟踪问题。利用反步法技巧设计了固定时间控制器来实现轨迹跟踪。文中证明了该方法可使机器人系统所有信号有界,且使跟踪误差在固定时间收敛。实验结果验证了本文方法的有效性。
1 问题描述
1.1 图论相关知识
多机器人系统由n个机器人和一个动态虚拟领航者组成。n+1个机器人之间的通信可以用一个无向图G=(N,E,A)来描述,其中N={0,1,···,n}为机器人集,E⊆N×N为边缘集,为邻接矩阵。当(i,j)∈E时,aij>0,否则aij=0。动态虚拟机器人R0确定整个多机器人系统的运动轨迹,不跟踪任何机器人,其余n个机器人Ri(i=1,2,···,n)以固定的距离 λi、角度 φi跟踪其给定的领航者Rj(j=0,1,···,n-1),形成n对领航-跟随子结构。
假设1[7]至少有一个机器人跟踪动态虚拟机器人R0。
1.2 领航-跟随编队运动学模型
在世界坐标系XOY中,引入的虚拟领航机器人Rdj、领航机器人Rj和跟随机器人Ri的位姿分别为,线速度分别用vdj、vj、vi来表示,角速度分别用 ωdj、 ωj、ωi来表示。其位置关系如图1 所示。

图1 领航-跟随者结构模型Fig. 1 Leader-follower structure model
假设2领航机器人与虚拟领航机器人姿态一致。
则机器人Rdj、Rj之间的位置关系可表示为
式中: φi为领航机器人和虚拟领航机器人的距离,λi所在线段与领航机器人速度方向之间的角度。
领航机器人的运动学模型为
结合式(1)、(2)可得
跟随机器人运动学模型为
假设3[22]机器人Ri满足以下速度约束:0 <其中vmax、ωmax为常数。
假设4[23]领航机器人的vj、ωj及其一阶导数是有界的,即有界。
1.3 相关引理
引理1[18,24]对于系统
存在正实数μ1,μ2>0,ξ1∈(1,+∞),ξ2∈(0,1)和连续可微正定函数V(x),有
则该系统是全局固定时间稳定的且收敛时间Ts满足
引理2[25]若γ1>1,则以下不等式成立:
若γ2<1,则以下不等式成立:
2 固定时间控制器设计
2.1 领航-跟随子结构的跟踪控制
n个机器人系统编队控制的目标是使机器人之间保持一定编队同时跟踪给定轨迹。由1.1 节可知,给定轨迹由动态虚拟机器人R0确定,n个机器人Ri(i=1,2,···,n)以固定的距离 λi、角度 φi跟踪其给定的领航者Rj(j=0,1,···,n-1),从而形成n对领航-跟随子结构,这样将编队问题转换成局部轨迹跟踪问题。而本节的控制目标是使机器人Ri以固定的距离 λi、角度 φi跟踪领航者Rj。为此引入虚拟领航机器人Rdj,将机器人Ri、Rj的跟踪问题转化为跟随机器人Ri与虚拟领航机器人Rdj轨迹跟踪问题。Ri、Rdj的误差定义为
利用反步法技巧引入虚拟输入 αi,根据式(4)有
结合式(3)、(5)、(6)可得
取李雅普诺夫函数为
对式(8)求导并代入式(7)得
设计虚拟输入 αi,使得满足
其中k1i,k2i,k3i,k4i>0 ,β1>1,0 <β2<1。
由式(10)、(11)可得线速度和虚拟输入:
其中
将式(10)、(11)代入式(9)可得
其中p1=min{k1i,k3i},p2=min{k2i,k4i}。由引理2,式(16)还可以写成
由式(17)得,xe、ye有界,由引理1 知跟踪误差xe、ye固定时间收敛。当xe、ye收敛到零时,由式(3)、(14)和(15)得,由于机器人Rdj运动学模型可以写为
其中k5i,k6i>0。
定理1对于领航-跟随子系统,控制输入式(12)、(19)可使闭环系统的所有信号有界,且跟踪误差在固定时间内收敛,其收敛时间Ti满足
其中a1、a2为常数。
证明取李雅普诺夫函数为
对式(20)求导并代入式(16)得
将式(19)代入式(21),可得
其中p3=min{k1i,k3i,k5i},p4=min{k2i,k4i,k6i}。由引理2、式(22)得
由此可得xe、ye、e是有界的。
将式(14)和式(15)求导得
由假设3、假设4 和式(25)、(26),可以得到mx、my、m˙x、m˙y有界。式(13) 对时间求导,代入式(12)得
2.2 编队控制
以下把领航-跟随子结构模型推广到n个机器人的编队控制。在实现领航-跟随子结构轨迹跟踪后,基于图论知识确定机器人之间的领航-跟随关系就可以实现机器人编队。无向图中的节点为动态虚拟机器人R0和n个机器人,无向图的边表示两个机器人间的跟踪关系。(i,j)∈E表示机器人Ri以固定的距离 λi、角度 φi跟踪跟随机器人Rj,此时,取ai j=1。邻接矩阵A为
邻接矩阵表示了机器人之间的相互联系,其中每一行表示一个跟随者,每一列表示它的候选领航者。如果第i行在第j列中有一个非零项,则机器人Ri跟随机器人Rj。由于动态虚拟机器人R0没有跟随任何机器人,因此第1 行中全为零。n对领航者和跟随者中,两个关键参数 λi和 φi决定了机器人子系统的几何形状,进而确定编队队形。当队形变化时,只需改变A, λi, φi的对应值。本文基于领航-跟随法将多机器人编队控制转化为多个领航-跟随子结构轨迹跟踪问题,根据定理1,每个领航-跟随子结构都存收敛时间的上界Ti,多机器人系统编队控制的收敛时间上界T为T=max{Ti},i∈N,且与控制律的参数有关。
3 仿真与实验验证
3.1 仿真验证
为了验证所设计控制器的有效性,在本节中,给出了数值仿真来验证从上一节得出的理论结果。考虑10 个机器人(R1,R2,R3,R4,R5,R6,R7,R8,R9,R10)和一个虚拟领航者R0,编队队形如图2 所示。
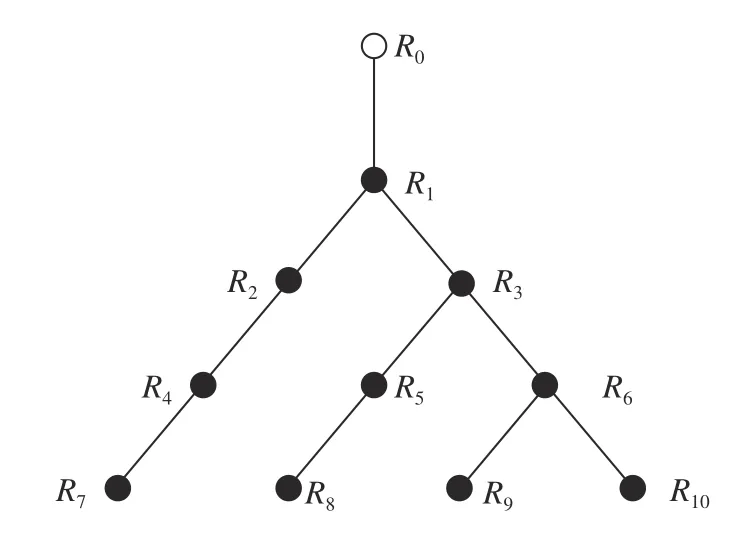
图2 机器人无向拓扑连接图Fig. 2 Undirected topology connection diagram of robots
为了直观地表示队形,为每一个跟随机器人Ri引入的虚拟机器人Rdj未在图2 中体现。由图2可得
期望轨迹定义为动态虚拟领航者R0,v0=1 m/s,ω0=0.1 rad/s。为了验证本文方法的跟踪性能不依赖于初始位置,给出了不同的初始位置下的仿真结果,记两个初始位置为(X1,Y1, θ1) 、(X2,Y2, θ2)。初始位置和编队期望距离及角度(λi,φi)如表1 所示。控制律的参数如表2 所示。由2.2 节的讨论和表2 可得仿真系统的收敛时间上界为机器人R2跟随R1的收敛时间上界45 s。仿真结果如图3~图8 所示。根据仿真图3、4 可以得出,控制器可满足编队的要求,跟踪效果显著。图5、6为机器人速度。如图7、8 所示,在初始位置变化时,控制器都可以在30 s 左右实现编队,该仿真结果符合上文讨论的系统收敛时间上界。
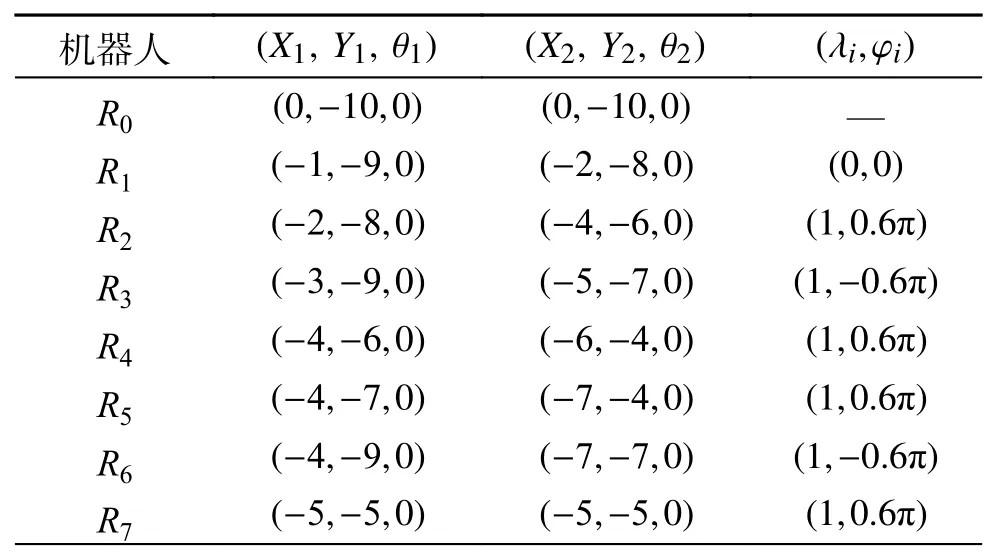
表1 机器人初始位姿和编队参数表Table 1 Initial pose and formation parameters of the robot

表2 固定时间控制参数表Table 2 Parameters of fixed-time control

图3 初始位置为(X1, Y1, θ1)固定时间控制机器人轨迹Fig. 3 Trajectories of fixed-time control with(X1, Y1, θ1)
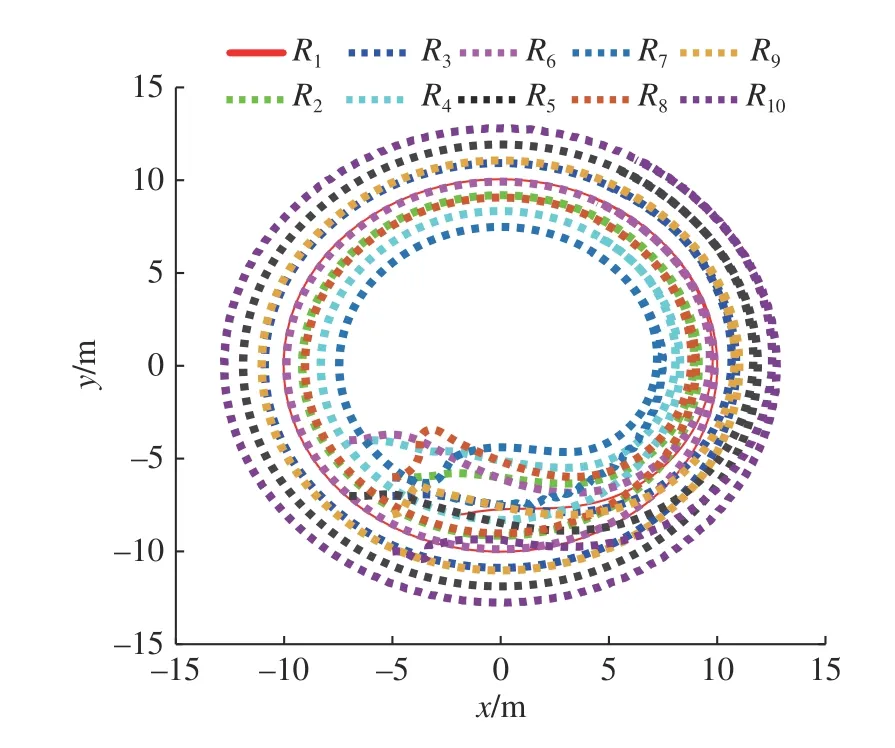
图4 初始位置为(X2, Y2, θ2)固定时间控制机器人轨迹Fig. 4 Trajectories of fixed-time control with(X2, Y2, θ2)
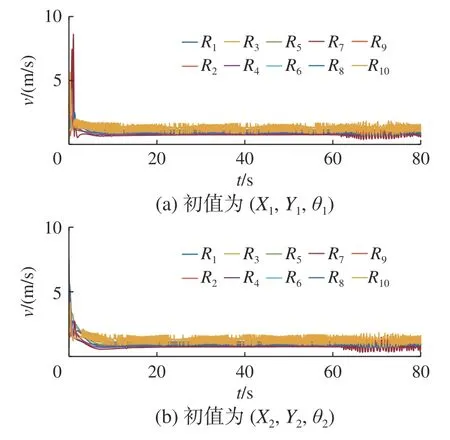
图5 固定时间控制机器人线速度Fig. 5 Robots’ linear velocity of fixed-time control

图6 固定时间控制机器人角速度Fig. 6 Robots’ angle velocity of fixed-time control

图7 固定时间控制的误差xeFig. 7 Error xe of fixed-time control
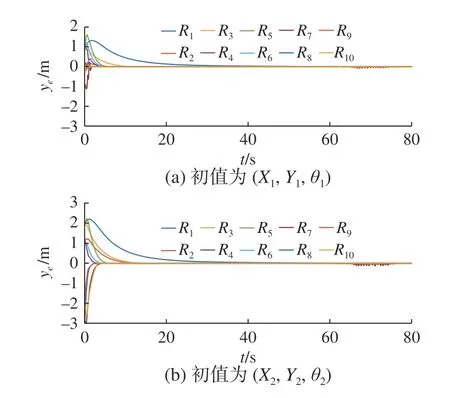
图8 固定时间控制的误差yeFig. 8 Error ye of fixed-time control
为了比较控制律的有效性,给出有限时间控制律:
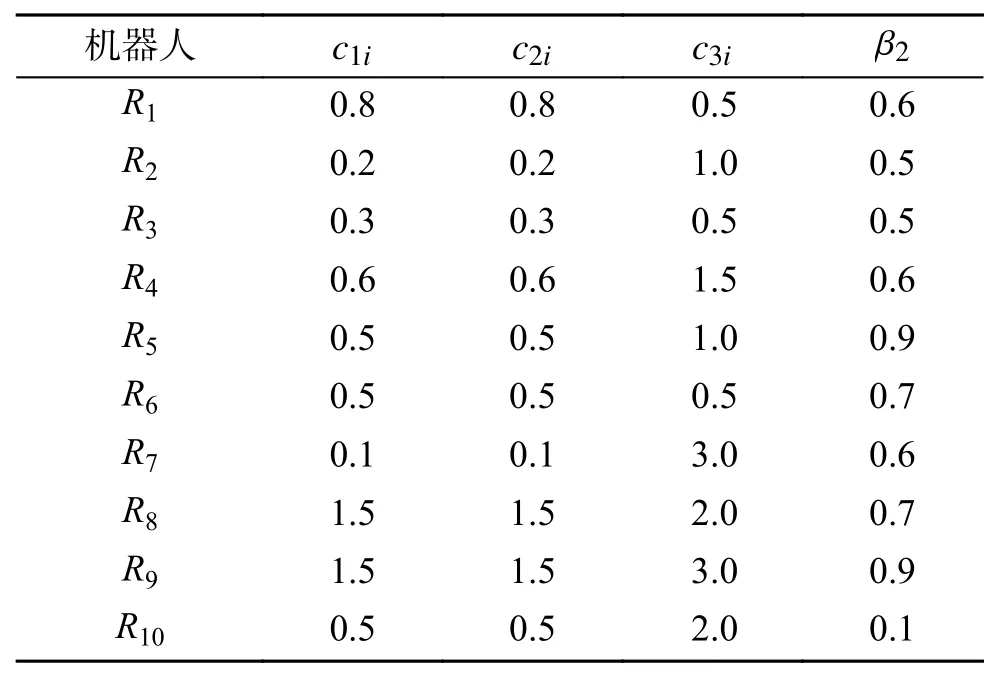
表3 有限时间控制参数表Table 3 Parameters of finite-time control
控制律与固定时间控制律采用相同的期望轨迹和初始位置。该实验可以实现不同初始值下机器人的编队轨迹,为了比较系统收敛时间的变化,只给出图9 和图10 所示的编队误差,当机器人初始位置发生变化时,收敛时间从20 s 变化到25 s左右。而本文控制器的系统收敛时间相对固定。


图9 有限时间控制的误差xeFig. 9 Error xe of finite-time control

图10 有限时间控制的误差yeFig. 10 Error ye of finite-time control
3.2 实验验证
实验平台为Turtlebot3 Waffle Pi,如图11 所示。为了验证本文所设计控制方法的有效性,在本节中,考虑3 个Turtlebot3(R1,R2,R3)和一个虚拟领航者R0,编队队形如图12 所示。为了直观地表示队形,为每一个跟随机器人Ri引入的虚拟机器人Rdj未在图12 中体现。由图12 可得邻接矩阵为
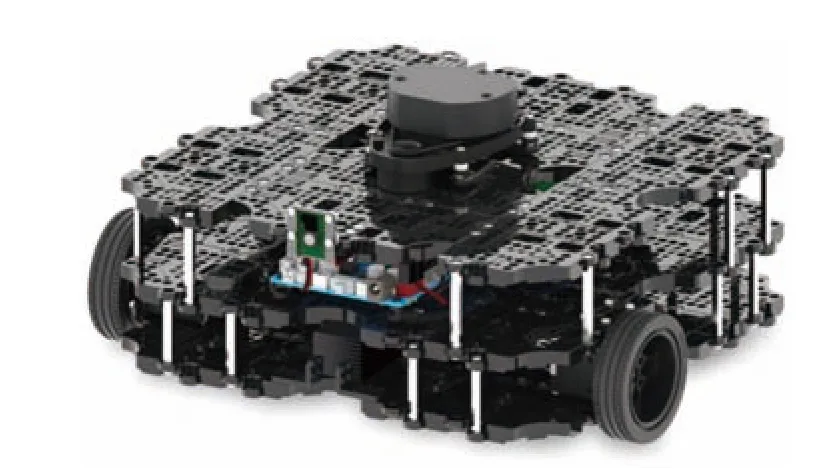
图11 Turtlebot3 Waffle Pi 机器人Fig. 11 Turtlebot3 Waffle Pi robots
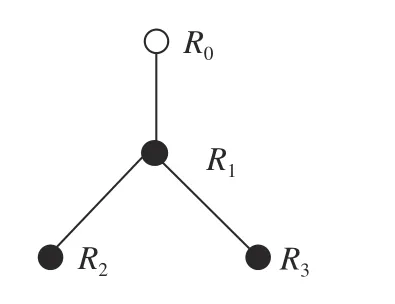
图12 机器人无向拓扑连接图Fig. 12 Undirected topology connection diagram of robots
期望轨迹由动态虚拟领航者R0确定,选取v0=0.075 m/s,ω0=0.05 rad/s。初始位置和编队期望距离及角度(λi,φi)如表4 所示,图13 为实验环境。控制器的参数选取如表5所示。由2.2 节和表5 可以获得的系统收敛时间上界为机器人R1跟踪R0的收敛时间上界240 s。实验结果如图14~图19 所示,其中图14、15为不同初始值下机器人的编队轨迹,图16、17为机器人速度,图18、19 为编队误差。本文的控制算法是基于理想状态的运动学模型设计的,未考虑机器人自身的机械结构、载重等因素,且由图13 可得本实验环境中不可避免出侧滑等情况,本文虽然在运动学模型中未考虑以上不确定性,但通过实验结果可以看出,对侧滑等不确定性有较强的鲁棒性,在初始位置变化时,本文所提出的方法仍然可以在120 s 内实现编队,该仿真结果符合上文讨论的系统收敛时间上界。

表4 机器人初始位姿和编队参数表Table 4 Initial pose and formation parameters of the robot

表5 固定时间控制参数表Table 5 Parameters of fixed-time control
图13 实验环境Fig. 13 Experimental environment

图14 初始位置为(X1, Y1, θ1)固定时间控制机器人轨迹Fig. 14 Trajectories of fixed time control with(X1, Y1, θ1)

图15 初始位置为(X2, Y2, θ2)固定时间控制机器人轨迹Fig. 15 Trajectories of fixed-time control with(X2, Y2, θ2)
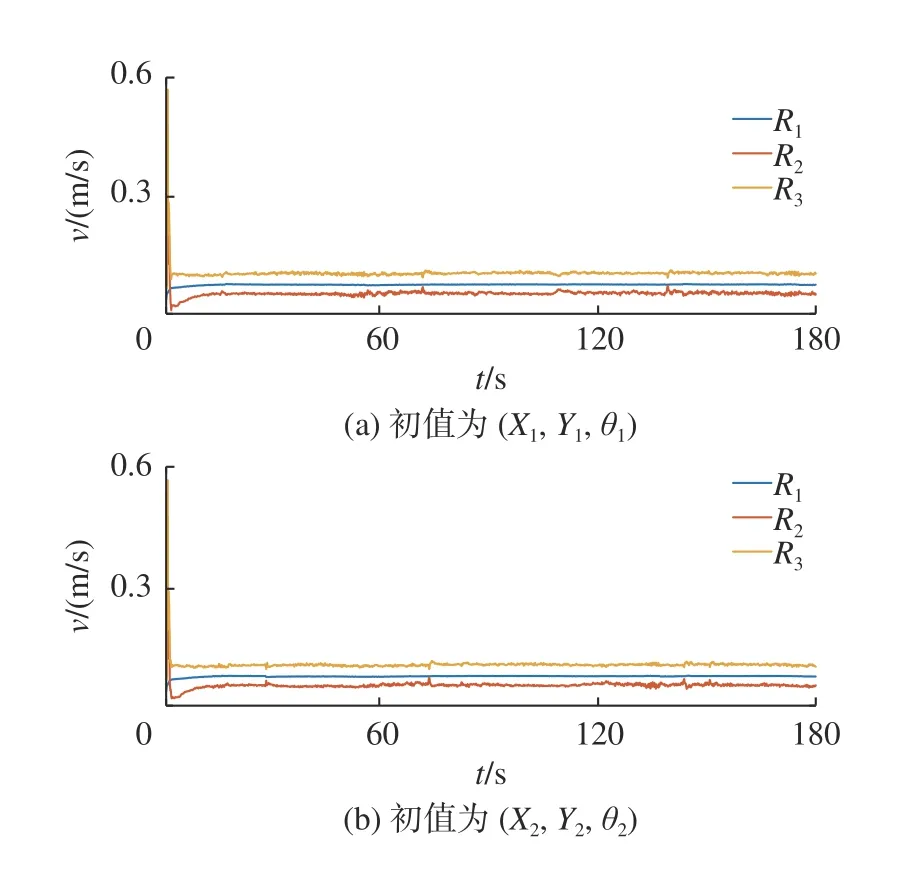
图16 固定时间控制机器人线速度Fig. 16 Robots’ linear velocity of fixed-time control
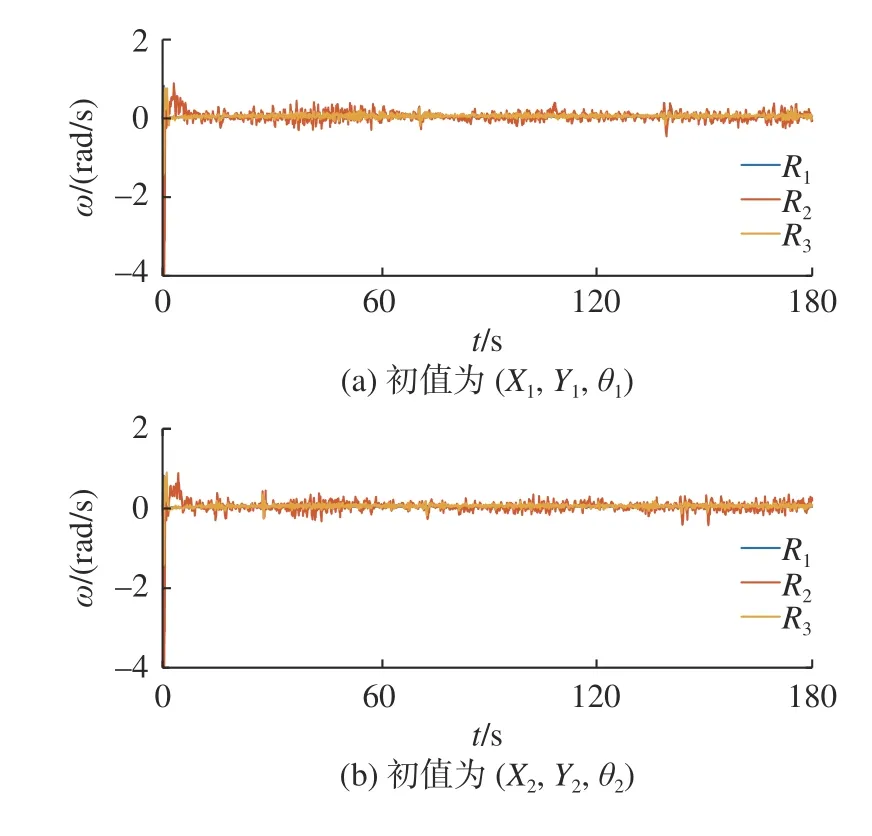
图17 固定时间控制机器人角速度Fig. 17 Robots’ angle velocity of fixed-time control

图18 固定时间控制的误差xeFig. 18 Error xe of fixed-time control

图19 固定时间控制的误差yeFig. 19 Error ye of fixed-time control
下面再对本文方法和有限时间控制方法进行实验对比,参数选取如表6 所示。期望轨迹和初始位置的选取和以上固定时间控制相同。该实验可以实现不同初始值下机器人的编队轨迹,为了比较系统收敛时间的变化,只给出图20、图21 所示的编队误差,当机器人初始位置发生变化时,收敛时间从80 s 变化到120 s,系统的收敛速度显然受到初始位置的影响,而从实验结果可知本文方法系统的收敛速度不受初始值影响。

表6 有限时间控制参数表Table 6 Parameters of finite-time control

图20 有限时间控制的误差xeFig. 20 Error xe of finite-time control

图21 有限时间控制的误差yeFig. 21 Error ye of finite-time control
4 结束语
本文提出一种固定时间编队控制方法。该方法参照领航-跟随策略,利用反步法技巧基于运动学模型的设计固定时间控制器来实现轨迹跟踪,进而实现编队控制。仿真结果表明,本文控制方法对初始位置不同的多机器人系统收敛时间基本一致,控制器很好地消除初始值对系统性能的影响。
