机器视觉下的钢轨廓形提取与磨耗测量
2024-01-15赵静
赵 静
(中铁建(天津)轨道交通投资发展有限公司,天津 300000)
中国高速铁路的快速发展大大促进了国家的经济增长,同时也带来铁路系统维护的高需求[1-2]。为了保证铁路系统的安全运行,需要定期对各部分设施进行安全检查。钢轨作为铁路系统的重要组成部分,长期暴露在野外环境且与列车车轮直接接触,如果发生严重磨损、脱落、断裂等,将会引发严重的安全事故[3]。随着重载铁路的不断发展,钢轨磨耗问题愈发严重[4],因此对钢轨进行安全检查尤为重要。
对铁路钢轨轮廓的测量,大多使用钢轨磨耗仪[5]。磨耗仪轻便、易于携带,但需要人工接触式测量,易产生人为误差及磨耗仪磨损,从而影响磨耗测量结果的准确性。随着计算机与视觉技术的快速发展,非接触式测量技术迅速发展[6-7]。非接触式光学测量技术根据其成像照明方式分为被动和主动两种。被动测量是通过仿真建立类似人体双目的视觉系统,从两个方向提取距离信息[8-10],计算量大,速度较慢,极度依赖被测物体的纹理特征。主动测量是利用结构光进行测量。结构光分为点结构光、线结构光及面结构光。点结构光结构简单、易于操作,但每次只能测量一个点,检测效率不高;面结构光测量范围大,但结构复杂、操作难度较高、处理速度较慢;而线结构光没有复杂的结构、易于操作,且数据处理速度较快,被广泛应用于工业测量方面。文献[11]利用线结构光提取齿轮的理论点云数据,但没有实际应用;文献[12]开发了一套基于线结构光的三维轮廓测量系统,体现了线结构光的优越性;文献[13]将线结构光与工业机器人相结合,测量大型物体三维形状,提出三维应用场景;文献[14]利用线结构光对路面裂缝容积进行测量;文献[15]基于激光摄像原理设计车载非接触式钢轨磨耗测量系统;文献[16]基于线结构光设计钢轨全断面测量系统,并利用试验验证了线结构光用于钢轨测量的优越性。
本文设计基于视觉的非接触、高精度、高效率的钢轨轮廓提取方法及基于粒子群优化的双圆拟合钢轨廓形匹配算法。该方法首先利用激光器投射出平行于钢轨断面的线结构光,形成包含钢轨轮廓信息的结构光光带;其次通过工业相机采集图像数据;然后根据结构光的颜色,采用Steger算法对钢轨轮廓进行粗精两次提取,得到具有单像素宽度的钢轨轮廓曲线,并经坐标转换模型处理得到钢轨断面的实际轮廓曲线;最后利用基于粒子群优化的双圆拟合钢轨廓形匹配算法对仿射误差进行补偿,并获取磨耗信息。
1 研究方法
采用基于单目线结构光的机器视觉法提取钢轨轮廓,通过比较提取的轮廓与钢轨的标准轮廓,对钢轨的磨损进行定量评估。整个系统安装于测量小车底部,线激光器在钢轨斜上方投射出平行于钢轨横截面的结构光平面,结构光平面与钢轨表面相交形成表征钢轨轮廓信息的光带。与线激光器成一定夹角安装的摄像机采集光带信息,通过计算机对该光带图像进行处理。根据结构光的颜色,采用Steger算法对钢轨轮廓进行粗精两次提取,得到光带的亚像素中心线。利用标定获得的相机参数与光平面参数将光带中心线的坐标转换为实际钢轨三维轮廓坐标,将提取的钢轨实际轮廓与标准轮廓对齐后进行磨耗测量,从而获取钢轨的磨耗数据,实现铁路钢轨轮廓与磨损的无接触高精度测量。
钢轨轮廓提取与磨耗检测系统如图1所示,主要包含图像采集、轮廓提取、参数标定、坐标转换,以及基于粒子群优化的双圆拟合钢轨廓形匹配算法。轮廓粗提取可以有效去除图像噪声,并将红色的线结构光带提取出来。轮廓精提取利用Steger算法对轮廓粗提取的光带进行亚像素中心提取。通过标定得到的参数及坐标转换模型将光带亚像素中心坐标转换为钢轨的实际轮廓曲线。随后通过双圆匹配算法进行对齐,以粒子群算法对误差进行优化,最终得到钢轨磨耗。

图1 钢轨轮廓提取与磨耗检测系统
1.1 轮廓提取
理想的轮廓采集图像由红色的结构光光带前景与黑色的背景组成,结构光光带与背景分明,易于提取。然而由于实际测量环境的限制,无法保证严格的无光条件,因此会产生光线干扰及其他噪声污染。由于系统使用的是红色的结构光,采集环境中其他红色干扰较少,因此可根据颜色提取轮廓曲线。本文使用高斯滤波与轮廓粗提取算法得到钢轨轮廓光带图像。
经过轮廓粗提取得到的结构光光带并不是理想的单像素的线宽,因此使用基于Hessian矩阵的亚像素级光条中心线提取方法,获取线结构光的亚像素中心。首先通过Hessian矩阵获得光条的法线方向,然后在其法线方向上对像素灰度应用泰勒多项式展开,得到灰度分布函数,进而计算出光条中心的亚像素位置。提取效果如图2所示。与其他算法相比,Steger算法在计算时考虑了光带的方向,具有较高的处理精度和较好的稳健性。

图2 Steger轮廓提取
1.2 参数标定
参数标定分为相机参数标定与结构光平面参数标定。相机标定采用张正友标定法,利用标定板获取相机的内部参数、畸变参数,以及与标定板位姿对应的外部参数。结构光平面标定是利用结构光平面与二维靶标平面相交形成的直线光条信息进行标定。本系统不要求靶标每次的位姿保持平行关系,只需要保证靶标在相机视野范围内,降低了标定过程的复杂度。
根据钢轨外形,轮廓轨迹被分为轨头与轨腰两部分。在拟合平面时,系统将剔除中心线上提取的像素点,即通过异常点剔除算法,剔除在中心线上明显远离轮廓的点,提高结构光平面拟合的精度;然后对剩余点进行稀疏采样,在保证轮廓形状不变的同时可提高后续算法的处理速度。
1.3 坐标转换
采样点在经过轮廓精提取后得到的坐标是像素坐标,表示的是轮廓上的点在图像上的位置。为了获取钢轨廓形的实际三维坐标,需要通过相机标定得到系统参数,从而将图像坐标转换至世界坐标系下。坐标转换模型如图3所示。

图3 坐标转换模型
首先利用标定得到的相机内参将像素坐标转换为相机坐标;然后利用相机坐标系与靶标平面世界坐标系的旋转矩阵与平移矩阵,得到像素点在靶标平面世界坐标系下的坐标;最后通过旋转矩阵将靶标平面世界坐标系转换为标准的世界坐标系,进而得到钢轨轮廓中心线在世界坐标系下的坐标。坐标转换中的旋转矩阵和旋转角度分别如下
(1)
(2)
(3)
(4)
1.4 基于粒子群优化的双圆拟合钢轨廓形匹配算法
钢轨轨头磨耗测量原理如图4所示,钢轨轨头磨耗分为垂直磨耗与水平磨耗。

图4 钢轨轨头磨耗测量原理
垂直磨耗为距离工作边1/3轨头宽处,待测钢轨与标准断面垂直方向的差值。水平磨耗为待测钢轨轨顶下16 mm处,待测钢轨与标准断面水平方向的差值。
钢轨的轮廓测量数据在实际测量中会随车体振动而发生变化。因此需对测量数据与标准数据进行匹配,从而通过对比分析得到钢轨的磨耗信息。在对齐过程中,由于激光平面与轨道纵向垂直性会受振动、安装误差等因素的影响而产生仿射误差,因此本文提出基于粒子群优化的双圆钢轨廓形匹配算法,解决钢轨廓形匹配的问题。
(1)双圆拟合钢轨廓形匹配算法。为实现钢轨廓形匹配,需至少选取两个匹配基准点。由于轨腰部分不与列车直接接触,不存在磨损变形现象,因此选取轨腰大小圆弧段的圆心作为匹配基准点。50 kg/m的钢轨轨腰部分由半径为350 mm的大圆圆弧和半径为20 mm的小圆圆弧组成。通过将轨腰数据点到圆心距离建立待优化函数,可以利用最小二乘法解算求得圆心的最优点,然后可计算得到待测钢轨轮廓与标准钢轨断面轮廓间的平移变换矩阵,将待测钢轨轮廓平移变换后,两者初步对齐。
(2)粒子群优化算法。为了提高测量廓形数据和标准廓形间的匹配精度,利用双圆拟合钢轨廓形匹配算法处理后,进一步利用粒子群优化算法进行精匹配。粒子群优化算法的基本思想是通过群体中个体之间的协作和信息共享寻找最优解。粒子群算法通过设计一种无质量的粒子,模拟鸟群中的鸟。粒子仅具有两个属性:速度和位置,其中速度代表移动的快慢,位置代表移动的方向。每个粒子在搜索空间中单独搜寻最优解,将其记为当前个体极值,并将个体极值与整个粒子群里的其他粒子共享,将最优的个体极值作为整个粒子群的当前全局最优解。粒子群中的所有粒子根据自己的当前个体极值和整个粒子群共享的当前全局最优解,调整自己的速度和位置。粒子更新速度和位置的公式分别为
(5)
(6)
式中,vid为粒子速度;k为当前迭代次数;ω为惯性权重,其值较大时,全局寻优能力强,局部寻优能力弱,其值较小时,全局寻优能力弱,局部寻优能力强;d=1,2,…,D,为向量维数;i=1,2,…,n,为粒子个数;c1和c2为非负常数,称为加速度因子;r1和r2为分布于(0,1)之间的随机数。
迭代过程中,每个粒子通过与自身上一次匹配度相比,找到个体极值;通过与种群中全部粒子匹配度相比,找到全局极值,进而不断更新自身的速度和位置,直至最大迭代次数或极值不再改变。迭代结束后,以全局最优粒子的位置向量作为最终的仿射变换参数Pg=[θgSxgSzg]T。随后实现误差纠正,公式为
(7)
2 试验与结果分析
试验所用相机选择大恒工业数字相机MER2-230-168U3C,镜头为HN-P-1624-25M-C1.2/1低畸变工业镜头,焦距为25 mm。平面靶标选用包含12×9个角点的高精度棋盘格标定板,单元格大小为15 mm×15 mm。选用一段长为30 cm的50 kg/m型号的钢轨。磨耗测量仪选用测量精度为0.05 mm、重复性精度为0.02 mm的数显钢轨磨耗测量仪。相关试验设备如图5所示。

图5 试验设备
工业相机采集到的轮廓图像如图6(a)所示,由线结构光前景部分、黑色背景及一部分环境噪声组成,经图像处理后得到图6(b)。可以肯出,图像中除轮廓曲线外的其他光影及噪声已被去除,轮廓部分用白色高亮显示。最后经过Steger中心线提取算法处理,得到准确的轮廓曲线,如图6(c)所示。

图6 钢轨轮廓曲线
相机内部参数标定结果见表1。结构光平面标定的可视化结果与光平面方程参数如图7和表2所示。

表1 参数标定结果
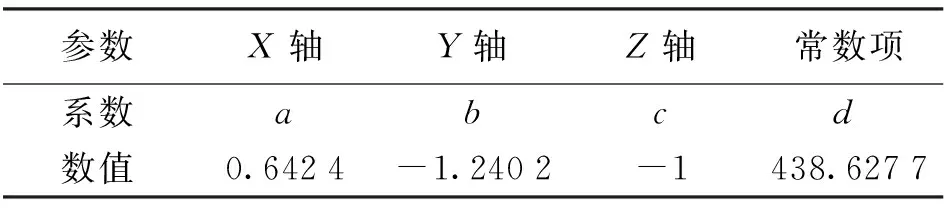
表2 结构光平面方程系数

图7 结构光平面
本文使用基于机器视觉的钢轨轮廓提取方法对一段标准的50 kg钢轨的20处进行轮廓提取,并通过基于粒子群优化的双圆拟合钢轨廓形匹配算法补偿仿射误差,得到拟合后的50 kg钢轨断面图(如图8所示)。将采集图像中的钢轨断面与标准钢轨断面进行比较,按照磨耗定义计算相应磨耗,将测得的钢轨磨耗数据与数显钢轨磨耗仪测得的磨耗进行对比计算,得到轨头部分的垂直磨耗与水平磨耗的测量误差,结果如图9所示。
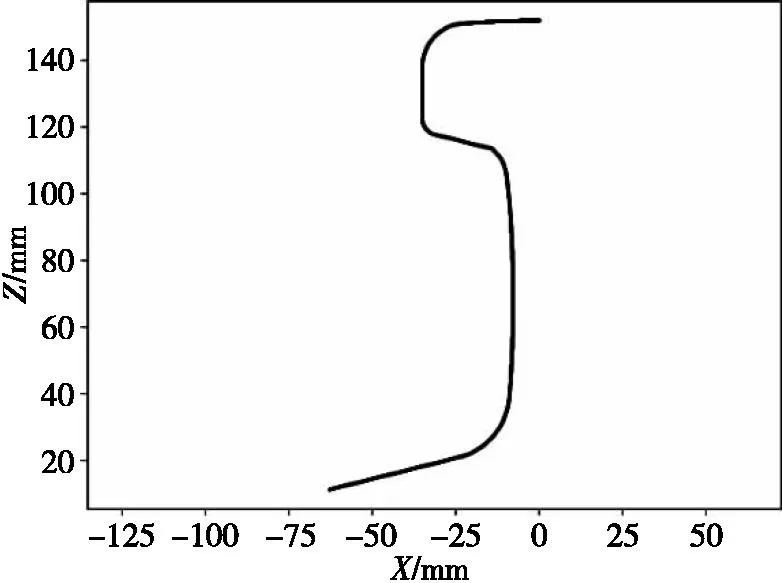
图8 拟合后50 kg钢轨断面
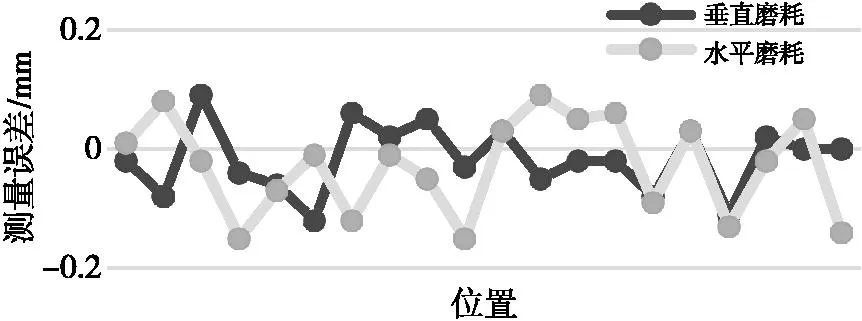
图9 磨耗测量误差
经计算,20处水平磨耗与垂直磨耗的均方根误差分别为0.108、0.074 mm,总磨耗的均方根误差为0.128 mm,表明本文的钢轨轮廓提取方法具有较高的精度。
将本文基于粒子群优化的双圆拟合钢轨廓形匹配算法与未优化的双圆拟合进行对比,结果见表3。可以看出,本文算法增加了少量计算时间,但精度得到明显提升。
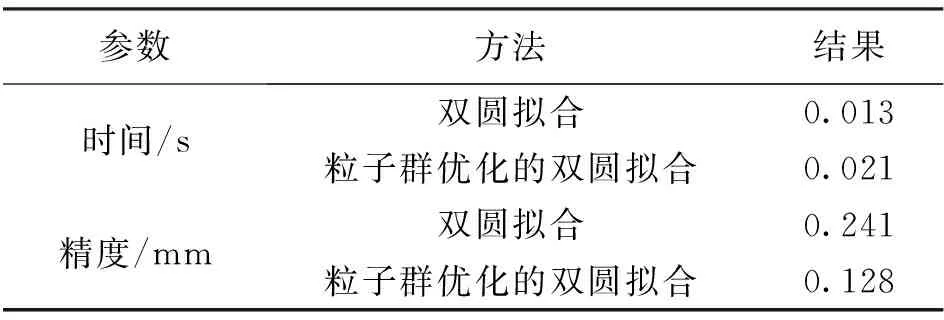
表3 优化算法效果
本文提出的钢轨轮廓提取方法包含摄影学、光学、图像处理等多种技术,因此导致误差来源于多个方面。硬件设备上,相机分辨率、镜头畸变、景深性能与线激光器发射的结构光宽度都会影响轮廓提取精度。对于不同的应用场景,可以选择相应性能水平的硬件设备。另一部分误差来自采集的图像中的噪声,使用图像处理算法去噪,根据结构光的颜色及Steger算法,对钢轨轮廓进行粗精两次提取轮廓中心线,同时利用基于粒子群优化的双圆拟合钢轨廓形匹配算法有效地降低磨耗误差。
3 结 语
本文设计并实现了基于结构光颜色和Steger算法的粗精二级钢轨廓形提取方法及基于粒子群优化的双圆拟合钢轨廓形匹配算法。该方法可有效降低磨耗测量误差,检测精度达0.128 mm,同时具备较高的测量效率。由于条件限制,本文试验是在静态环境下完成的,针对动态情况下钢轨轮廓的提取是后续的研究方向。